It has almost been 2.5 years since we last made a compilation video about what has been done with the crazyflie 2.0 (see this blogpost). During this time we released several new products and many of you were able to achieve very cool and awesome applications so we thought it was time for a new research compilation video!
We have seen quite a lot of projects with swarms of Crazyflies, ranging from close proximity flight to autonomous exploration in a building. Some research groups have also been experimenting with controlling the Crazyflie with our own hands, either to control its position or to reach another state of mind entirely. Others have created their own deck in order to add their own sensors or cameras necessary for their application. One of those even led to the new AI-deck that we introduced in early release before the summer! Last but not least: we were shown that the low level control can be further improved and multiple crazyflies can be linked together and still fly!
We were overwhelmed by all the awesome things that the community showed us of what possible with the Crazyflie and this will inspire others to think of new things to do as well. We hope that we can continue with helping you to make your ideas fly, so that we are soon to be forced to make another completion video ;)
Here is a list of all the research that has been included in the movie:
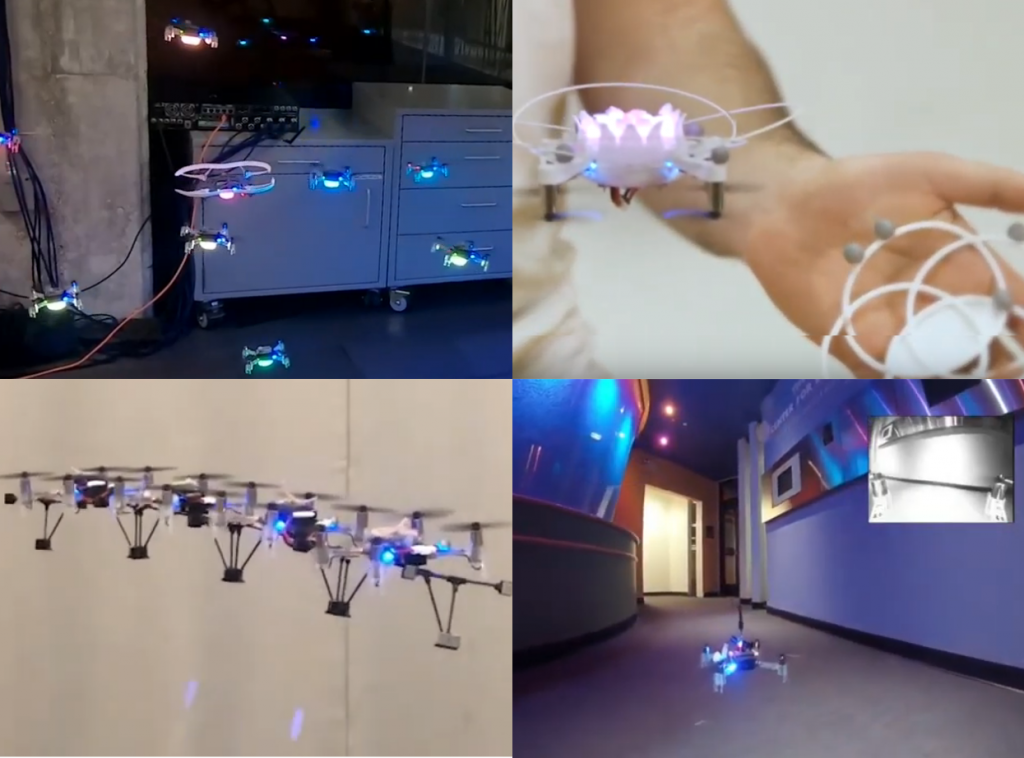
- Close proximity flight of sixteen quadrotor drones, CalTech: B. Rivière, W. Hoenig, Y. Yue, and S.-J. Chung (video, paper)
- Pointing gestures, IDSIA: B. Gromov, J, Guzzi, L. M. Gambardella, A. Giusti (video, project)
- Yaw actuation, Modlab UPenn: B. Gabrich G. LiM. Yim (video, paper)
- Learning to seek, Harvard University: B. P. Duisterhof , S. Krishnan, J. J. Cruz, C. R. Banbury, W. Fu, A. Faust, G. C. H. E. de Croon, V. Janapa Reddi (video, paper)
- Drone Chi, Exertion Labs and RMIT: J. La Delfa, M. Baytas, E. Luke, B. Koder, F. Mueller (video, project)
- Generalization through simulation, Berkeley AI Research (BAIR): K. Kang, S. Belkhale, G. Kahn, P. Abbeel, S. Levine (video, paper)
- Swarm exploration, TU Delft: K.N. McGuire, C. De Wagter, K. Tuyls, H. Kappen, G.C.H.E. de Croon (video, paper)
- PULP-based autonomous drone, ETH Zürich: D. Palossi, F. Conti, and L. Benini (video, paper)
- Networked Autonomous Aerial Vehicles, University of Klagenfurt, Austria: Research by Karl Popper Kolleg (video)
- GLAS for Multi-Robot Motion Planning with End-to-End Learning, CalTech: B. Rivière, W. Hoenig, Y. Yue, and S.-J. Chung (video, paper)
- Resilience by reconfiguration, USC: R. K. Ramachandran, J. A. Preiss, G. S. Sukhatme (video, paper)