We have a guest blog post this week from Christopher Banks at Georgia Tech, where he tells us about their work with the Robotarium. Enjoy!

Multi-Agent Aerial Robotics
In the GRITS Lab we focus on autonomous control and coordination of multi-robot systems with applications in – but not limited to – optimal control, constraint-based control, and hardware development. We are home to the Robotarium [1], a remotely accessible swarm robotics testbed that is free for anyone around the world to use for academic and educational purposes. We have integrated Crazyflies into the Robotarium as the main vehicle for aerial robot swarms due to their small size, quiet operation, and high maneuverability . Also, due to their low inertia, they pose minimal harm to their surroundings if system failures occur. Their small size and robust nature are well suited for flying in an indoor testbed like the Robotarium. As we work towards extending the operation of the Crazyflies in the Robotarium to external users, we encountered some important research questions: How do we guarantee the quadcopters remain “safe” (undamaged) while minimizing modifications to user inputs? How do we develop an easy to use interface for external users, with experience ranging from novice to expert? What commands can be used by external users to control a swarm of robots? This post will briefly describe the ongoing research aimed at solving these questions.
Safety Guarantees
To ensure hardware safety while flying experimental algorithms we have developed Control Barrier Functions (CBFs) for quadcopters, allowing users to give nominal control inputs while obeying some safety constraints for the system (e.g. collision-free trajectory following). In the video below, we give four Crazyflies the commands to fly in a circle. A fifth Crazyflie is then told to fly to waypoints that will intersect the circle and attempt to collide with the circling quadcopters. Using CBFs a central controller can modify the inputs given to Crazyflies near collision to ensure safe velocity commands that are close as possible to the user intended control [2] . These CBFs can also be designed to ensure safety by bounding the quadcopters to a designated region of the testbed, giving additional safety constraints by protecting areas outside of the motion capture system during flights.
User Interfaces
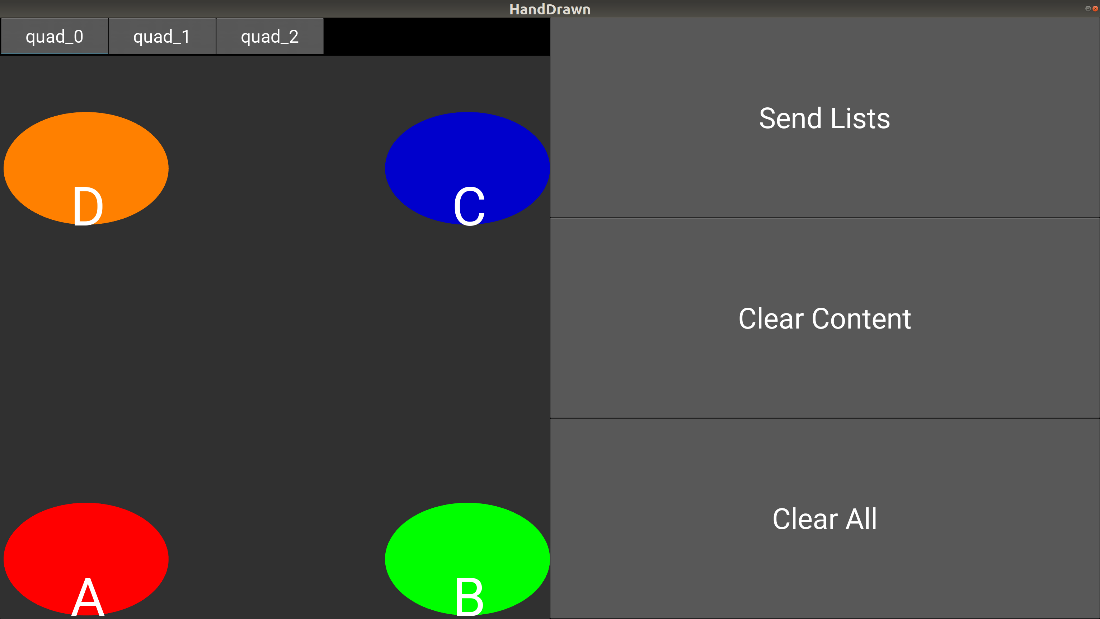
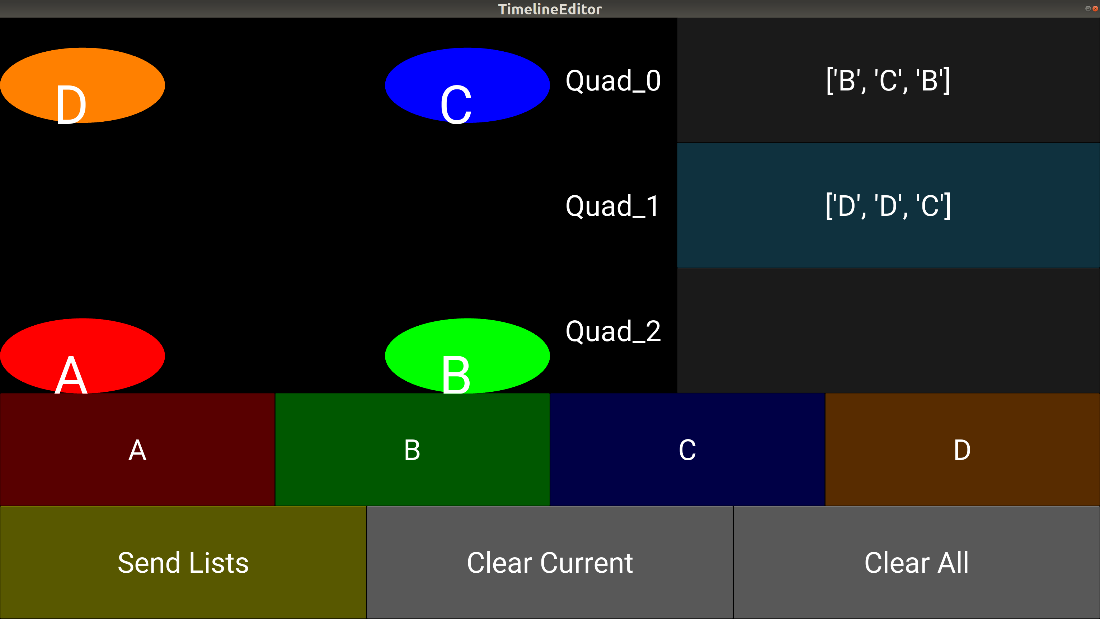
We have also used the Crazyflies to understand how remote users can best interact with the Robotarium both at the interface level and in planning. One project involved studying the effectiveness of graphical user interfaces (GUIs) on swarm robotic control. Two GUIs were developed with different interaction modalities. The GUIs were designed to map user inputs to a set of hoops placed in the Robotarium. One GUI (shown in Fig. 1) provided users the ability to draw paths through a touchscreen interface on a two-dimensional map and then map those inputs to trajectories for a team of robots. The other GUI (illustrated in Fig. 2) allowed users to input a sequence of desired hoops for a team of robots and execute trajectories based on the input.
Multi-Agent Planning
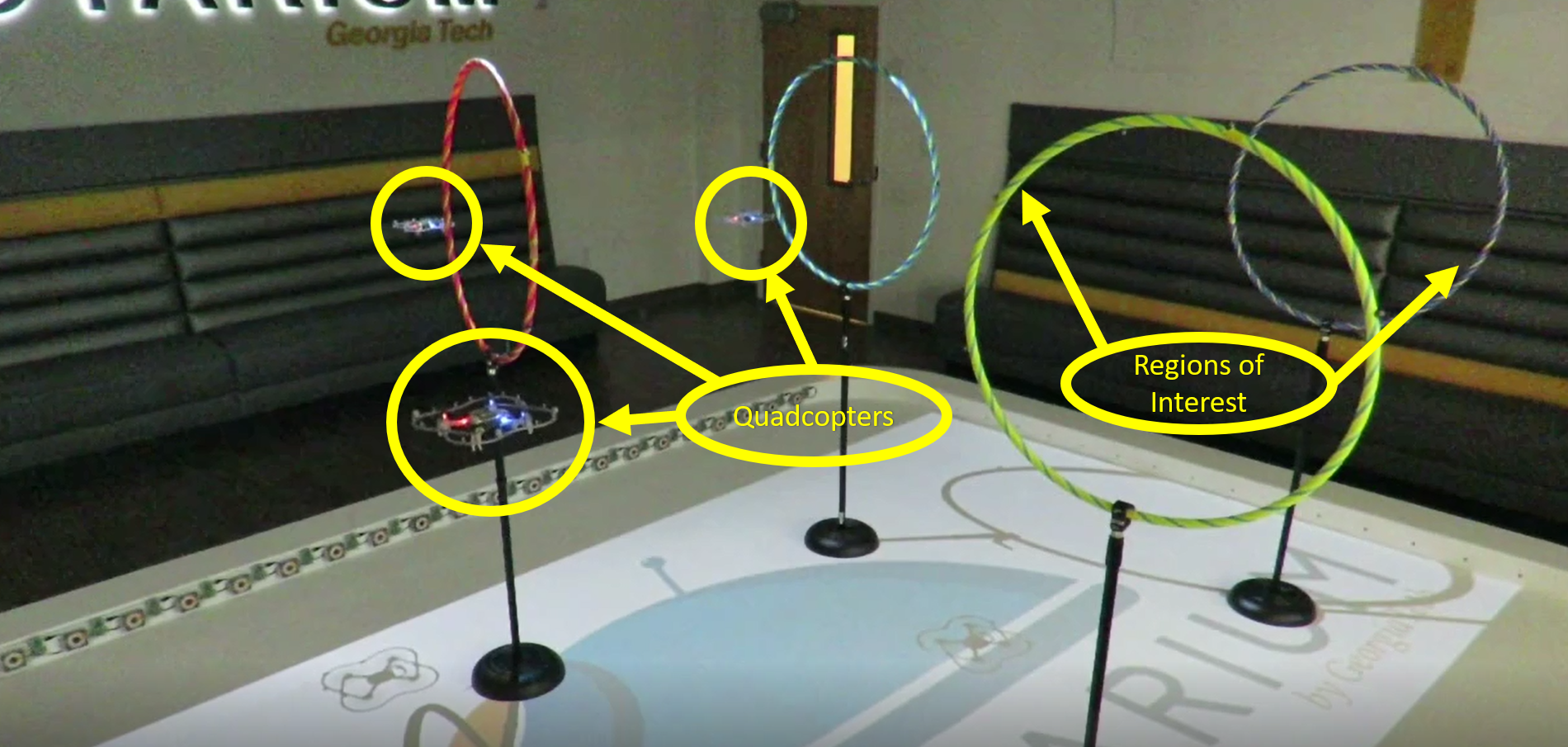
In planning, we looked at how multi-agent planning can be approached using high-level specifications. These high-level specifications allow users to develop plans requiring groups of robots to visit regions of interest (see Fig. 3) and trajectories are generated automatically. To represent these specifications, we use a logic formalism known as temporal logic to encode a preferred sequence of plan execution. As an additional step, users could include constraints on the trajectory by minimizing a cost using stochastic sampling. For more details, see the attached video demonstrating task allocation in a fire-fighting scenario.
Future Directions
As we continue to expand the capabilities of the Robotarium we are looking into how to develop long term autonomy for the Crazyflies. This includes autonomous charging as well as remote access for the lab and other users. We hope to use the Lighthouse system as a method for long term tracking since the Crazyflie will know its position instead of relying on passive tracking from a Vicon system. Our plans also include a lab-based simulator for in house projects related to the Crazyflies as well as updating our system to incorporate Crazyswarm to make control of the Crazyflies easier in implementation. In addition to this, in order to accommodate unknown users, we will have to figure out a control scheme that encourages use from a wide variety of users ranging from novices in quadcopter control to experts. We’ll keep Bitcraze updated on the Robotarium’s progression towards fully autonomous aerial swarms!
Links
- Robotarium Article: https://ieeexplore.ieee.org/document/8960572
- CBFs for Quadcopters: https://ieeexplore.ieee.org/document/7989375