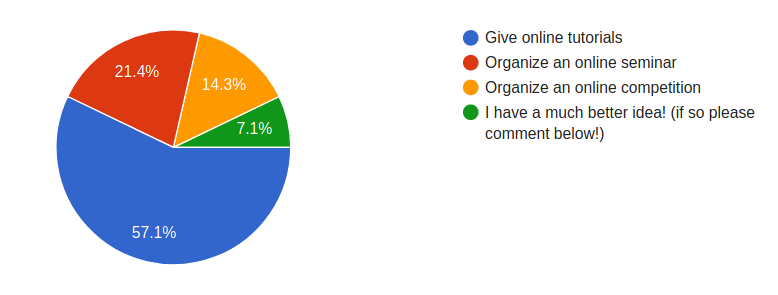
As you probably already know we have been wondering how to best handle our documentation and how to provide information to new Crazyflie starters as easy as possible, as you can read in our blogpost of two weeks ago. In the mean time, we also had a chance to think about the results of a poll we had when we discussed about new ways on how to meet our users. We had about 30 responses, but it became clear that many of you are in the need of getting some more knowledge about working with the Crazyflie. The majority voted for online tutorials, and although it might be difficult to do those during the summer holidays, we already started to make step-by-step guides of various parts of the Crazyflie Eco-system.
Python Library Tutorials
Currently we have started with step-by-step tutorials of the CFLIB (the python library of the crazyflie). Usually we refer to the example pages of the CFLIB, however we feel that many users copy paste parts of these scripts for their own purposes, without understanding what is actually going on. Therefore, in order to move Crazyflie beginners to the starting developer phase, we have made these guides in order to teach exactly what is going on in each module, step-by-step.
These tutorials can be found in the python library documentation. The first tutorial focuses on connecting, logging and parameters, which guides you through the process of connecting the Crazyflie through a python script, starting up logging configurations in two ways (asynchronous and synchronous) and how to read and set parameters.
The second tutorial is about the motion commander and is a logical continuation of the first. A nice thing is that we also show how to build in some protection in your script as well. If the Flowdeck is not attached, you can check that and prevent the Crazyflie from taking off altogether if it does not detect the Flowdeck. This will be a life saver in your future endeavors, and trust me I know from experience ;). Afterwards it will go into how to take off – fly forward and go back to the initial position. The application of the end of the motion commander tutorial, is where we also use the logging functionality to get the actual estimated position of the Crazyflie. With this information, we show how to write an application that create a virtual bounding box where the Crazyflie can bounce around in (like the old windows screensaver).
We are planning to finish this step-by-step guide by adding the multi-ranger to the mix, continuing on the bouncing ball example. After that we will probably start some tutorials on how to use the swarming functionality before moving on to the firmware or the client.
Work in Progress
The tutorials are still work in progress. So let us know on the forum, python library github repository or as a comment on this blogpost if you see anything wrong or if something is not very clear. This will improve the quality further so that other users can benefit as well. Also once the these step-by-step tutorials are finished we can start working on video based tutorials as well.
Remember, it is possible to contribute your own fixes (or tutorials) to our repositories if you want to. It’s an open source project after all ;)