We are currently working on a local positioning system based on ultra wide band decawave DWM1000 modules for the Crazyflie. We have already written a couple of times about it earlier, and in this post I will describe where we are now. We will also start making a wiki page and add more about the experimentation in the future.
During the end of year 2015, we have made some progress! We just moved to a new office and we now have a local positioning lab in the basement, where we are able to fly a Crazyflie 2.0 autonomously using the local positioning and keeping clear from the walls (I would like to say to keep a stable position, but we are not there yet :-).
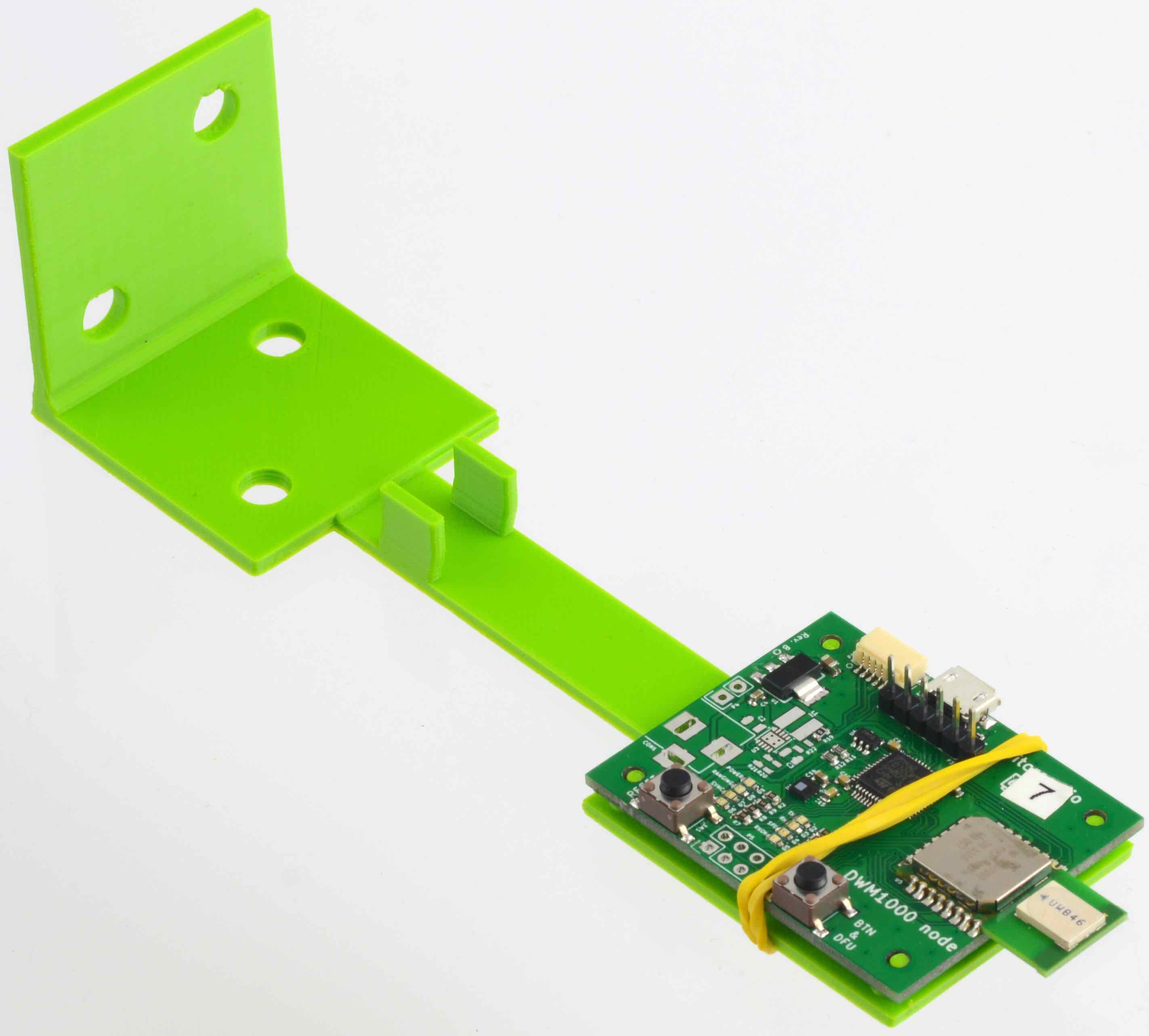
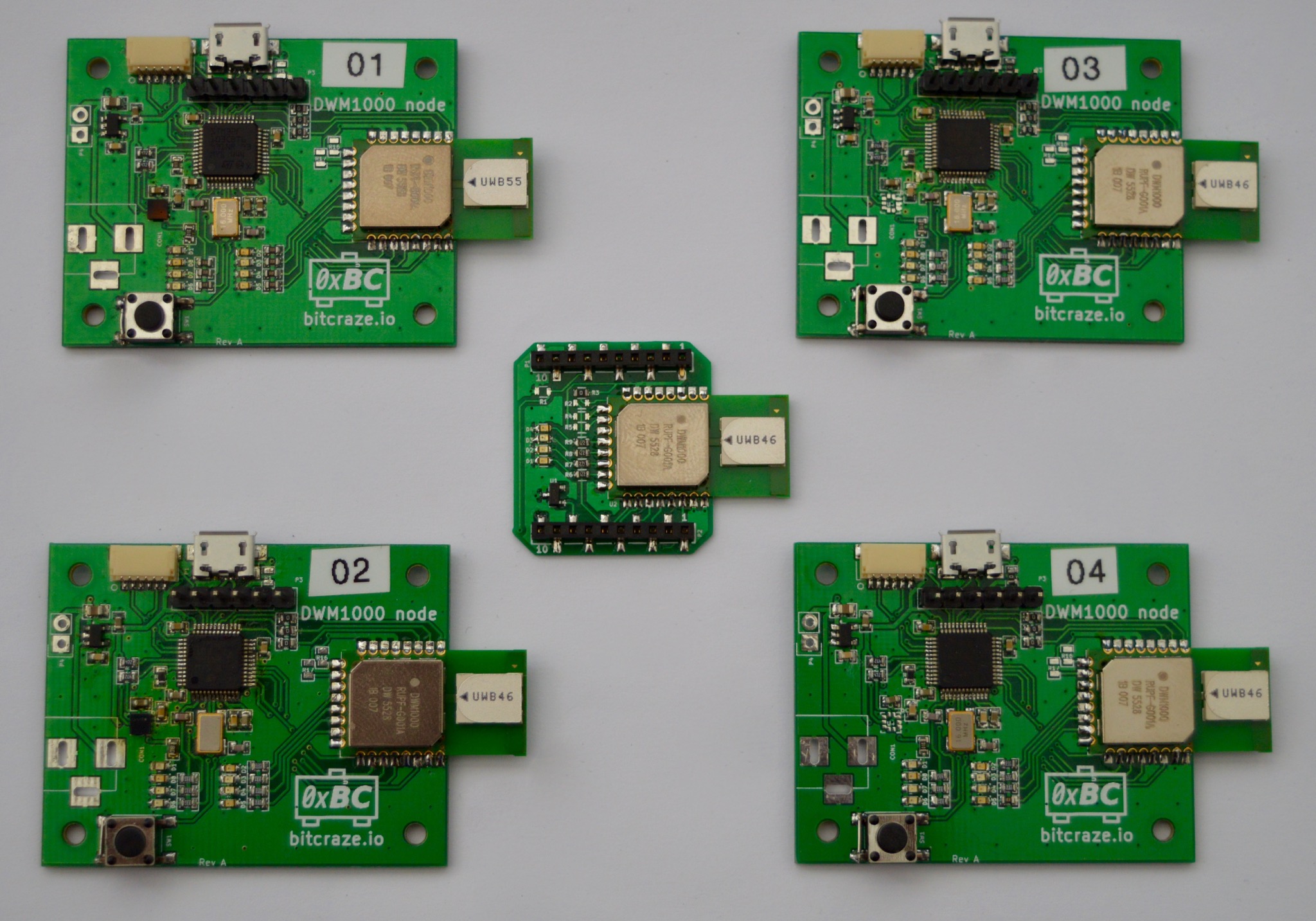
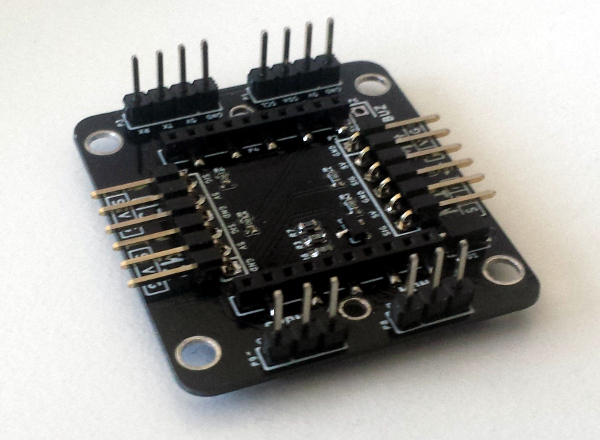
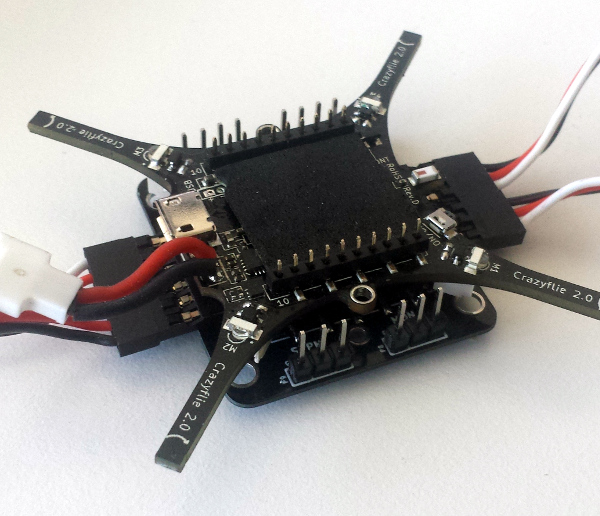
As we have shown in previous posts we have electronic boards for the anchors, and the Crazyflie deck:

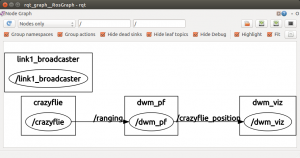
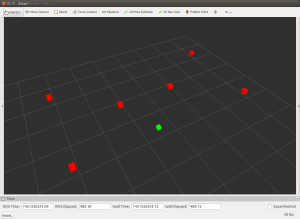
We have setup 6 anchors at our office. The configuration is designed to maximize the trilateration precision in the middle of the room. The ranging is done by the crazyflie and then communicated to the ground using the log subsytem. The ROS crazyflie driver receives the ranging and send it to the trilateration algorithm, a particle filter. We can then display the estimated position and use the position to control the Crazyflie position:
In order to try to fly autonomously, we have been trying the controller included with the Crazyflie ros driver. We also connected ROS via ZMQ to our python client and the controller we made to fly autonomously with the Kinect. Both work but are far from perfect: they have been tuned for a pretty stable measurement (from a Vicon system or a Kinect) and the output of the particle filter is a bit noisy, mostly for the altitude. We are looking at improving the position control loop and adding sensor fusion for positioning in the Crazyflie 2.0.
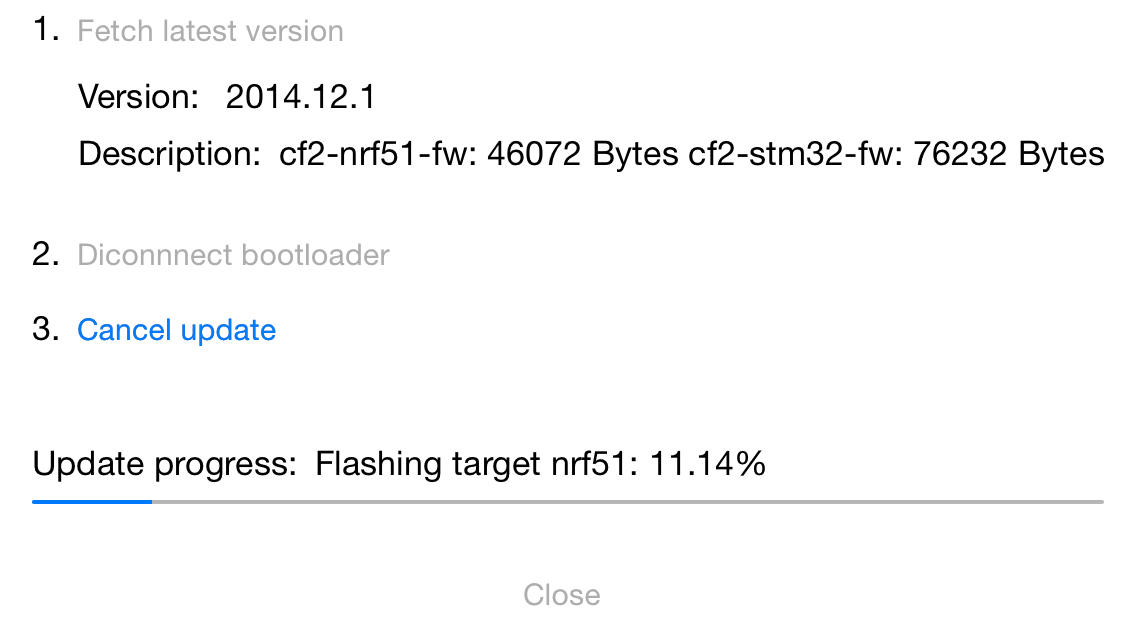
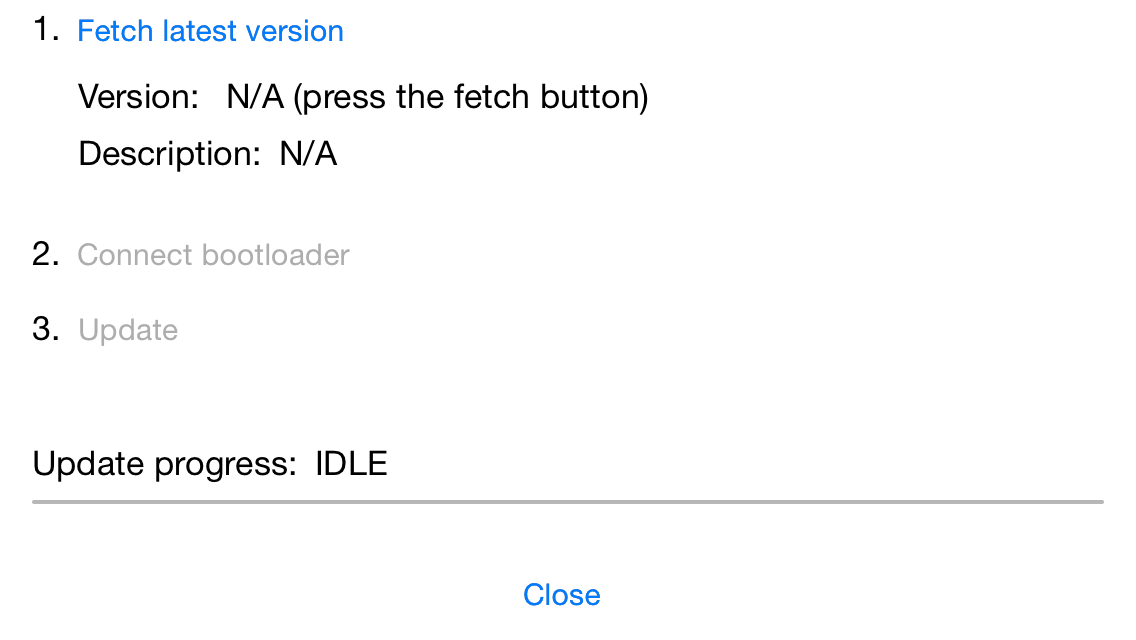
Early 2016 will be time to finalize the DWM1000-based local positioning system to be able to distribute it. We are currently writing an open-source C driver for the DW1000 chip and we are finalizing the anchors electronic design. If you are interested in getting such system do not hesitate to contact us, as we are finalizing the design, any input is interesting so that we end up with a system that is easy to use and to setup.