As some of you may have noticed, the current LED-ring deck doesn’t play nice with the Crazyflie 2.1 Brushless. The culprit? A resource clash between the DSHOT motor signals and the WS2812 LED driver used for the LED-ring.
But good news! We’re prototyping a new LED deck that solves the conflict by switching to I2C communication. Not only does this fix the compatibility issue, it also gives us a chance to improve its features. Here’s what we’ve improved so far:
Using a highly efficient high powered LED
DC/DC driving circuitry to improve LED driving efficiency
1W on each channel (red, green, blue, white)
LEDs on both sides so it can be mounted both on top or on bottom of the Crazyflie
LED-deck with a 3D-printed diffuser mounted underneath the Crazyflie 2.1 brushless
The LED we’re using is very powerful and the light is emitted from a small area, so a light diffuser is needed to get a more pleasant light. Designing something that can be manufactured is the next step of the project. Make sure to follow our blog to get more updates on this project.
The last couple of months we have been working really hard on finalizing the Crazyflie 2.1 Brushless and we’re happy to say that we’re finally nearing the release date! The first units are scheduled to be finished during December with shipping in January. Make sure so sign up for the Crazyflie 2.1 brushless product notifications to not miss out once it’s available!
We’re also working hard to offer everything that complements the Brushless. You’ll have access to spare parts and the option to choose your platform for some bundles. Hopefully, the charger will also been available soon, to allow you to charge the Brushless effortlessly!
Ever since we developed the new 47-17 propellers it’s been on our list to update the Crazyflie 2.1 kit. And finally it is here! While we were at it, we also updated the battery which is now 1 gram lighter with the same performance and capacity. These changes will improve the flight duration and thrust with up to 15%.
An assembled Crazyflie 2.1+
At the same time, we will discontinue the Crazyflie 2.1 as the Crazyflie 2.1+ replaces the 2.1. If you still need the old propeller, don’t worry, we will continue selling this.
Increasing prices
As with the rest of the world, we’re feeling the impact of inflation, and like many others, we’re having to make some adjustments to keep up with the rising costs. We’ve done our best to keep things steady, but in order for us to keep developing our products we’ve realized that a small price adjustment across our product line is necessary. So starting today, August 19th, you’ll notice a slight increase of up to 10% on our products.
For the upcoming Crazyflie 2.1 brushless we developed, together with a leading motor manufacturing brand, a brushless 08028 motor, targeting high quality and high efficiency. The 08 – stator size motors are usually optimized for high power output, to serve the FPV market, but we where aiming for high efficiency. This means fitting maximum amount of copper around the stator, lowering KV, thin stator lamination sheets and high quality dual ball-bearings.
Specification
Stator size: 08028 (8.4mm x 2.8mm)
Stator lamination sheets: 0.2mm
Motor KV: 10000
Internal resistance: 0.52 Ohm
Weight: 2.4g
Dual ball-bearing design, using high quality NSK or NMB brands.
1 mm shaft, 5 mm length
Matching propeller: Bitcraze 55-35mm
Peak current 1.8A, peak power 7.2W -> 30g thurst @ 4V (using 55-35)
Rated voltage: 4.2V
Together with the bitcraze 55-35 mm propeller we manage to achieve a system efficiency of over 5 W/g during hover, not to shabby. As a reference, FPV setups normally achieve around 2 W/g. This will bring the hover time for the Crazyflie 2.1 brushless, in the barebone configuration, a bit over 10 minutes.
One of the great features of the stock Crazyflie 2.1 is that it is more or less harmless. The Crazyflie 2.1 brushless weighs roughly the same but has almost twice the amount of thrust force, so a little bit of more care is needed. We therefore decided to provide optional propeller guards. While propeller guards adds safety they also add weight and disrupt the air flow from the propellers. Adding to that, the weight is located far from the center which increases the inertia even further, resulting in a less agile drone. For some applications this is not a problem but for others it is, this is why we are making them optional, meaning they are easy to replace with simple landing legs by utilizing a snap-on fitting.
The design is not fully finalized yet but we are getting close, voilá!
If the design goes according to plan they will also withstand some bumping against walls which will be a very nice feature for many applications.
Further the landing legs and propeller guards are designed in a way so they will detach during high force impacts to prevent the PCB arms from breaking.
Dumping and loading persistent parameters to and from a file
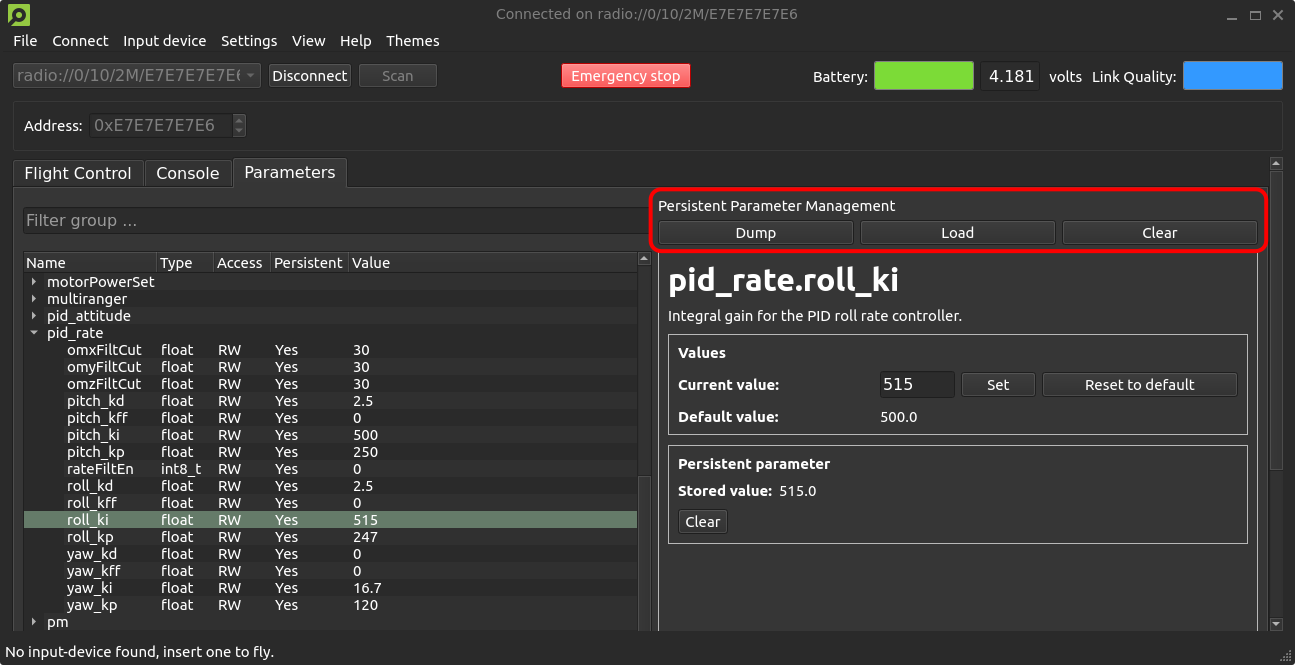
We have a small quality-of-life update that will allow users to dump and load persistent parameters to and from a file that has recently been merged #PR443 and #PR706. A new persistent parameter management area is introduced to the parameters tab of the client, with buttons for dumping and loading persistent parameters, as well as clearing all stored persistent parameters from the Crazyflie. The persistent parameters are stored in .yml format, allowing for manual editing if desired. If you have any improvement suggestions please drop us a comment!
A new persistent parameter management area is introduced to the parameters tab of the client, with buttons for dumping, loading and clearing stored persistent parameters.An information dialog notifies users of the dumped persistent parameters and their values. Loading parameters will result in a similar pop-up.A confirmation dialog prevents accidental clearing of persistent parameters.
System-id code merged to master
Back in 2021, we created the system-id deck which we talked about in this blog post. It has not been officially released but a few users have gotten some PCBs and built it themselves. The functionality for the system-id deck has previously been in a branch, but as code in branches tends to become outdated, we have now moved this into the master branch utilizing the kbuild system instead. Building for the system-id deck is now as easy as doing “make sysid_defconfig” and then compiling. While talking about the system-id deck, let’s check the interest of releasing it as a product. It can help with system identification, tuning of controllers, improving efficiency etc. With enough interest there might be an economy in manufacturing it.
Out of stock
Unfortunately, we’re out of stock of Crazyflies at the moment. We expect some at the end of next week, so hopefully, you should be able to find them back in the store quickly.
Developer meeting
The next developer meeting will be on the 6th of March 2024, Arnaud will talk about the Crazyflie Client past, present and future, based on its last blog post. The client is still very useful but starts to show its age so we are looking at what should be kept, what should be improved and what should be removed. We will present what we have in mind, please come and discuss with us so we can shape the next 10 years of Crazyflie client!
It’s been cooking on the slow burner for a long time now, the Crazyflie 2.1-Brushless, or CF21-BL in short. Ever since we got inspired by the tinypepper 1-cell brushless motor controller which showed us a small brushless ESC could be made, we got the idea of integrating brushless ESCs into the Crazyflie. Integrating the ESCs turned out to be easier then we though, but we hade more ideas, we wanted it to be efficient. Due to the FPV market and the toothpick sized category plenty of appropriate size components exist, however none is really optimized for efficiency. So we had to go back to the drawing board, contact suppliers and work with them to try and improve efficiency. This turned out to be a very time consuming task and we are now at a stage where we think we have gotten as far as we can with the resources we have.
Why go brushless?
A brushless setup is better in most aspects but it has some downsides, such as cost and complexity. The brushless motors requires a more complex design and is therefore more expensive to manufacture. It also requires a more sophisticated motor driver that also needs a larger PCB board space. On the upside we have better power to weight ratio, better longevity and efficiency to name a few. For the tiny type of brushless motors that are interesting here the efficiency gain is not so obvious though. This is mainly because it is hard to make an efficient motor driver due to the low inductance in the motors and this can definitely be further improved, perhaps with software upgrade of the ESC firmware in the future.
Let’s dive into the current specification!
After many prototypes this is where we are at now:
Crazyflie 2.1 base design using the PCB as the frame.
4 x integrated 1-cell 5A ESCs running BLHeli_S/Bluejay
Weight: 32 grams ( including 350mA battery)
4 x 08028-10000KV high-quality motors generating up to 30 grams thrust each
Custom-designed and optimized 55mm propellers with 35mm pitch
Over 10 min hover time in 32-gram configuration (~5g/W efficency)
The added thrust and the longevity of the brushless motors are probably the key features of the CF21-BL. This will improve payload capability or agility for applications where this is needed as well as the robustness. It will come at the expense of a higher price tag though.
The Crazyflie 2.1-Brushless has come a long way but there are still many things that have to be done before it will be available in the store and it is too early to talk about any timeline, but the goal is to release it during 2024!
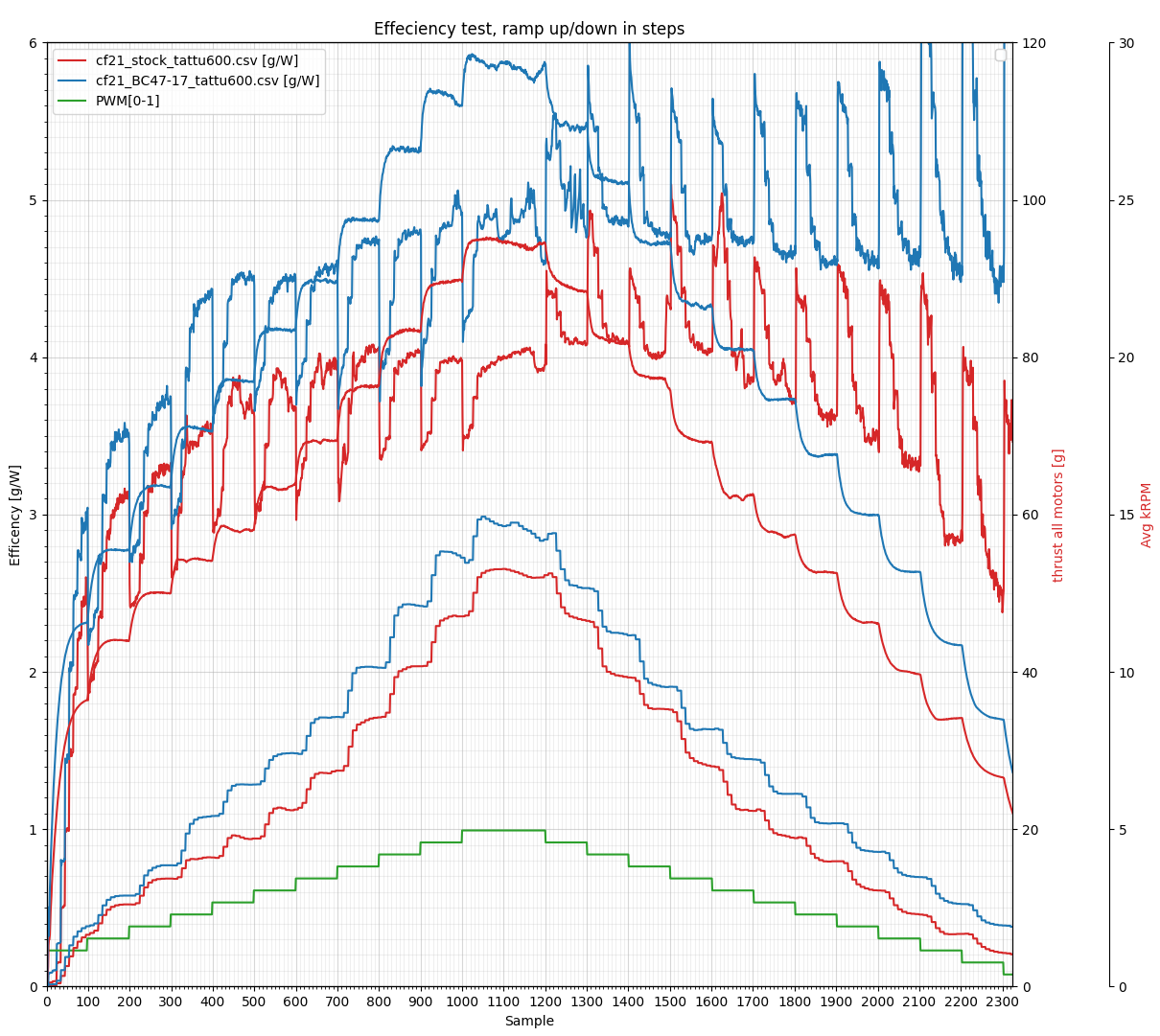
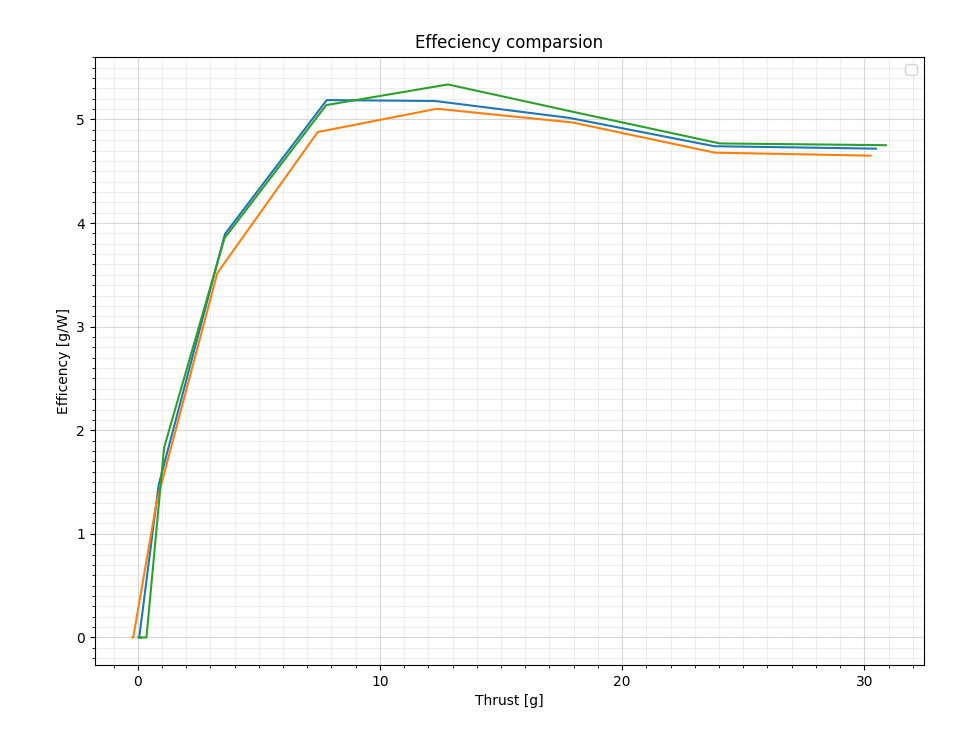
Last week our brand new 47-17 (47mm diameter, 17mm pitch) Crazyflie 2.X propeller became available in black and green in the shop! It is a custom designed propeller for the 0.8mm shaft, 7×16 coreless brushed motor, that comes with the Crazyflie 2.X. The improved design boosts the efficiency, both flight time and maximum thrust is increased with up to 15%. It is made in polycarbonate (PC) which makes it more durable so that it will withstand crashes better. The new propeller is better then the stock 45-17 in almost all areas except in noise where the new 47-17 propeller runs at a higher RPM. Below is a graph comparing the two propellers using the thrust stand we previously built. The graph is a bit messy but hopefully you can figure it out! The big takeaway is that the 45-35 propeller tops at ~4 g/W while the 47-17 tops at ~4.7 g/W using the stock 7×16 motor.
The Crazyflie 2.1 kit will continue to be shipped with the “stock” 45-35 propeller. At some point we want to switch to the new propeller in the kit. We don’t know when this will happen yet and will of course announce it here at that point :-).
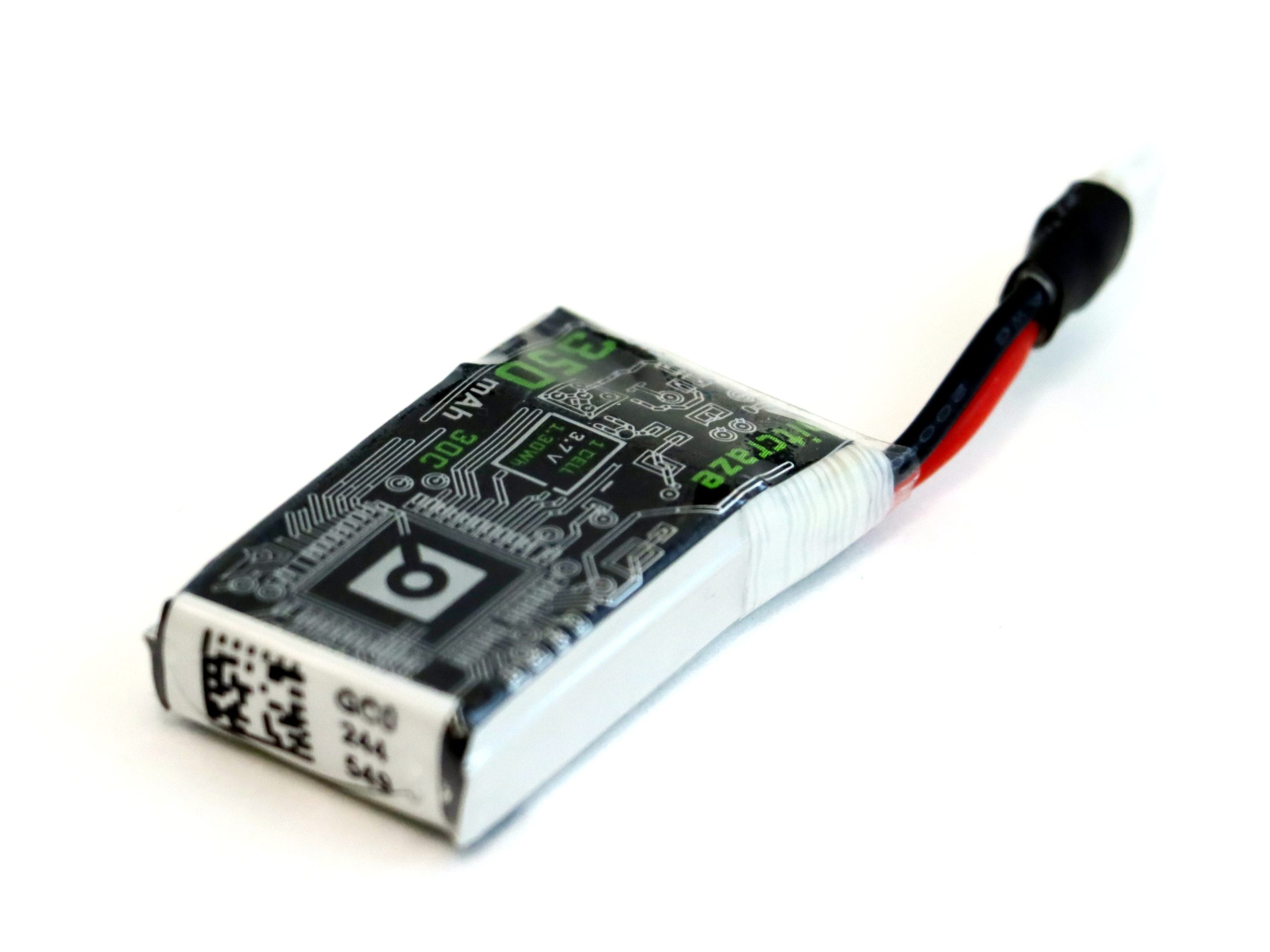
We are happy to announce that we are working on a new upgrade battery for the Crazyflies! It will soon hit production and hopefully, keeping our fingers crossed, it will arrive in our stock in early 2023-Q4.
The upgrade battery is based on the “Tattu 350mAh 3.7V 30C 1S1P” cell and with some additional great features:
Protection Circuit Module (PCM) to protect against short circuits, overcharge, over discharge etc.
Gold-plated connectors for lower contact resistance.
Shrink wrap around connector for better rigidity.
Cool Bitcraze matched graphics.
And if we list the benefits compared to the stock Crazyflie battery:
Higher current capabilities, 30C burst current, that is >10 Amp.
350mAh instead of 250mAh
Higher energy density, ~130 Wh/kg instead of ~105 Wh/kg
There are some drawbacks too:
It is ~1 mm thicker and does not fit well with all deck boards and the short or medium size pin headers. We will release longer pin headers at the same time though.
Price will be higher
~1.5 grams extra weight
With this upgrade battery, you will experience longer flight times, more “punch” during acceleration and it is great combined with the thrust upgrade kit!
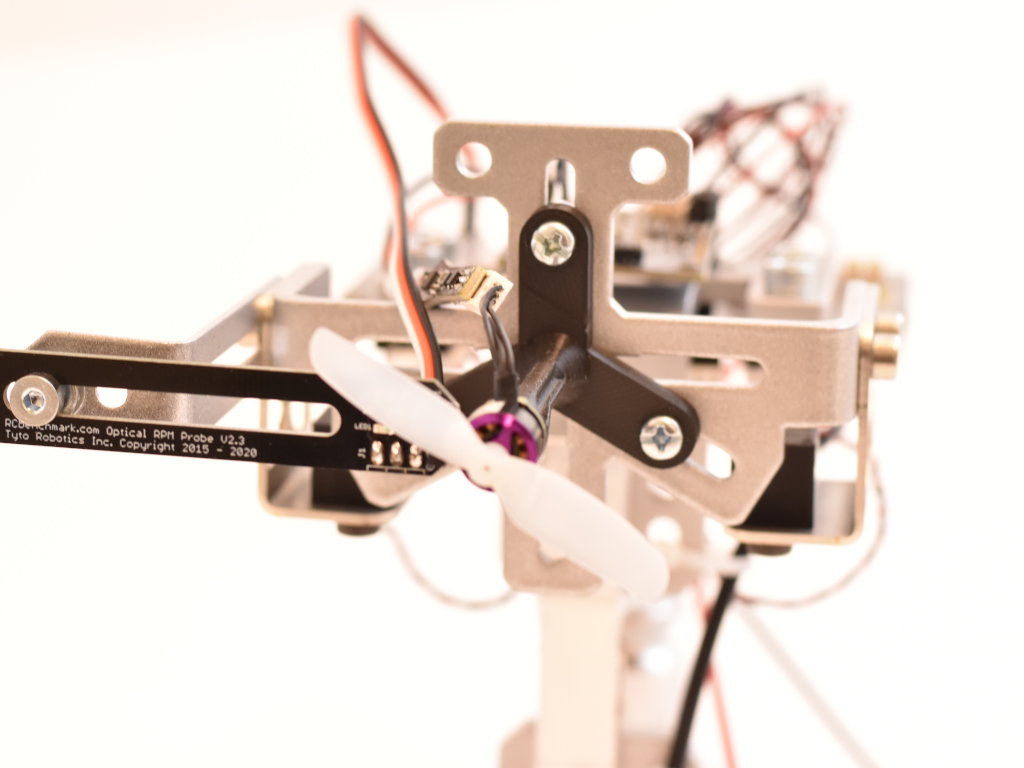
When designing flying robots like drones it is important to be able to benchmark and test the propulsion system which in this case is a speed controller, motor and propeller. As we at Bitcraze are mainly working with tiny drones we need a thrust stand designed for small motors and propellers. We have actually already designed our own system identification deck, which can measure overall efficiency, thrust, etc., but is lacking the ability to measure torque. Torque is needed to be able to measure propeller efficiency which is now something we would like to measure. Before we developed the system-id deck we searched for of the shelf solutions that could satisfy our needs and could not find any. This still seems true, please let us know if that isn’t the case.
Expanding the system-id deck to measure torque doesn’t work and building something from scratch was a too big of a project for us. Next natural option would then be to modify an existing thrust stand and our choice fell for the tyro robotics 158X series.
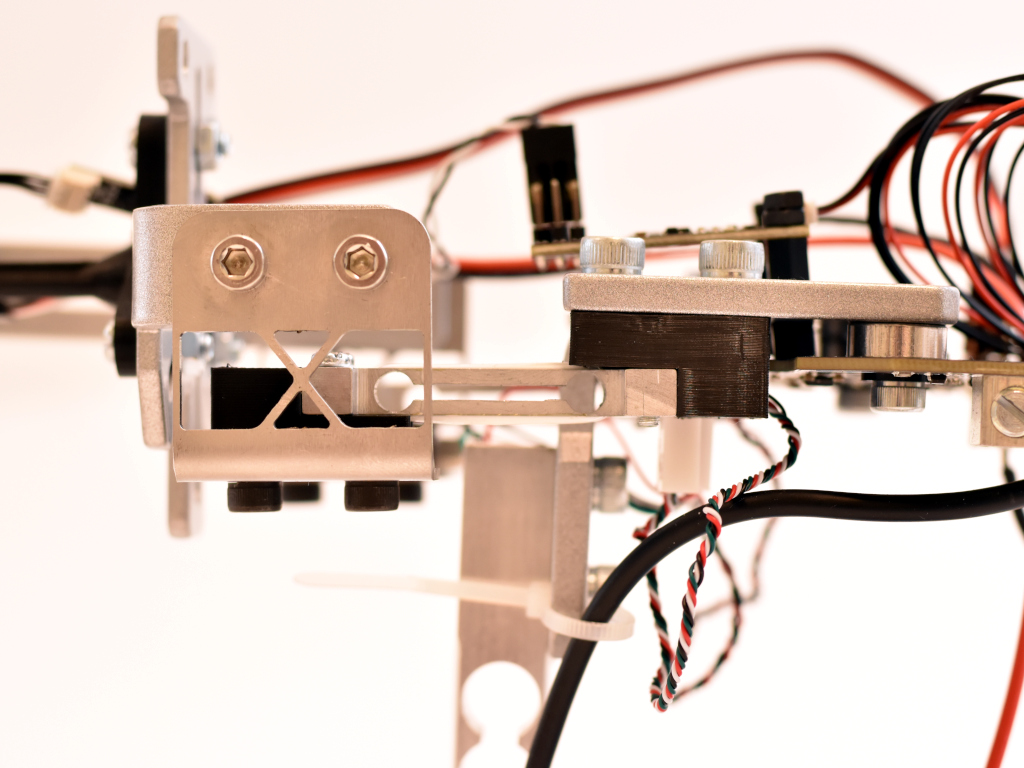
Looking at specifications, images and code we could figure out that replacing the load cells for more sensitive ones should be possible. The stock setup of 5kgf thrust and 2Nm of torque is just too much as we are looking for around 100 grams of thrust and around 10 mNm of torque. So we decided to give the replacement of load cells a shot! Assembly was quite smooth but we managed to break one of the surface mount load cell connectors off, luckily this was easily fixable with a soldering iron. With the stock setup we did some measurements with a 0802 11000KV brushless motor and a 55mm propeller in a pushing setup. It works but the measurements are noisy and repeatability is not great. Next thing would be to replace the load cells. The 158X uses TAL221 sized load cells which are available down to 1kg. We got those and with a calibration-allways-pass code we got from Tyto robotics we could make the calibration pass (note that modifying the thrust stand breaks the warranty). Now the thrust stability was much better but still the torque was a bit to noisy. We decided to go for even smaller thrust cells, the TAL220, and build 3D printable adapters to make them fit.
Now the torque noise level looked much better and so did the repeatability. By empirically measuring the thrust and torque using calibrated weights and by checking the measurements in RCBenchmark we got these values:
Thrust, calibrated weight [g]
Measured [g]
Noise [g]
200
200
1
100
100
1
50
50
0.5
20
20
0.5
10
10
0.5
0
0
0.5
Trust (calibrated using 200g weight)
Torque, calibrated weight [g]
Measured [mNm]
Noise [mNm]
200
257
2
100
128
1
50
64
0.3
20
25.7
0.3
10
12.7
0.3
0
0
0.2
Torque (calibrated using 200g weight)
Simple repeatability test
The thrust stand modification is still very fresh and we have to figure out some things but it all looks promising. For example we get 13% less overall efficiency when measuring it using our system-id thrust stand. Our guess is that it is due to that the Crazyflie arms in the system-id case blocks the airflow.
If you would like to do this modification yourself there are some simple instructions and STL files over at out mechanical github repository. Have fun!