The Crazyflie 2.0 was released almost 4 years ago now. When we released it we wanted to avoid limiting our users in hardware. We over-designed it with lots of features and power we weren’t using at the time of release. We also put in the deck connector so we could keep users updated with new hardware without having to replace their Crazyflies.
Over the years there’s been thousands of users and lots of feedback on the product. Most of it great, but there’s of course also been issues that needed to be addressed. The original design concept is still working with new decks coming out and still free CPU cycles, flash and RAM. So instead of major updates we decided to focus on fixing the issues we’ve seen while keeping backwards compatibility for our users.
So today we’re really excited to announce we’ve released the Crazyflie 2.1! The updated version of the Crazyflie brings improved flight performance, better durability and improved radio stability.
Here’s a list of the updates:
Better radio performance and external antenna support: With a new radio power amplifier we’ve improved the link quality and added support for dual antennas (on-board chip antenna and external antenna via u.FL connector)
Better power button: We’ve gotten feedback that the power button breaks too easily, so now we’ve replaced with a more sturdy alternative.
Improved battery cable fastening: To avoid weakening of the cables over time they now run through a cable relief.
Improved sensors: To make the flight performance better we’ve upgrade the IMU and pressure sensor. The new Crazyflie uses the drone specialized sensor combo BMI088 and BMP388 by Bosch Sensortech. It lowers drift and avoids accelerometer saturation which makes the IMU more “trustable”.
It’s important to note that the Crazyflie 2.1 is a drop-in replacement for the Crazyflie 2.0. All spare parts and decks are compatible with both the Crazyflie 2.0 and the 2.1.
We even took it so far that the same binary can be flashed on the Crazyflie 2.0 and 2.1 without any special care. The binary will automatically activate the right drivers which means working with mixed groups of 2.0 and 2.1 isn’t a hassle.
When releasing the Crazyflie 2.1 we’ve also updated all the bundles to contain the new version. But even though you can’t get the bundles with the Crazyflie 2.0, there’s still some Crazyflie 2.0 units left from the last batch that can be purchased in the E-store.
Another hectic year has passed. We can’t believe it’s been seven years since our first blog post. Only missing a few Monday blog posts over these past seven years makes this post #375! Kind of impressing from a bunch of nerds that rather write code instead of communicative and fun blog posts :-).
As being the last blog post of the year we can’t think of anything better then summarizing 2018.
In the beginning of the year the Digital artist Ben Kuperberg wrote about working with the intersection between juggling and technology and how he had been working with the Crazyflie in he’s performance. Later when visiting us during the summer he elaborated a bit more about LaMoucheFolle the open-source software he has develop to connect, monitor and control multiple drones.
Our community member Fred, the maintainer of the Android Crazyflie client and Java Crazyflie lib posted about the status of the Android client.
The community is one of the big motivators for us. We are very, very thankful for your support! You keep us going!
Software
On the Loco positioning side there has been a lot of focus on TDoA, aka swarm positioning. During the year we managed to release TDoA2 and TDoA3 as experimental. Read more about the algorithms in their respective blog post.
The Crazyswarm fork was merged into master, thanks again USC ACT Lab!
Together with Qualisys we continued the work to add support for their MoCap cameras to the Crazyflie system.
It might not be correctly classified as software but we released a new front page!
The Multiranger and the STEM ranging bundle was released! The Multiranger deck gives lots of exciting new possibilities when it comes to navigation and classroom activities. Se it in action here.
We released the Swarm bundle. A great package to get started with Crazyflie swarms.
Logistics
We can’t summarize 2018 without a note about the logistics problems we had which made us move the stock to our office in Malmö. Who figured it could be that hard! For those that had to wait a long time for their packages, we apologize. The good news is that it is much better now and logistics will work flawlessly in 2019!, hopefully… :-)
In August we got invited by Marion from ETH Zurich to help out with this years PolyHack, that is organized by Telejob, and which theme was about drones. We really like this kind of events but our reality is that we normally don’t have enough time to participate. For this occasion though we had the opportunity to both have fun and see how our products work when used during an event like this. Two birds with one stone and the decision was made. Together with one of the main sponsors ELCA, we organized the flying postman challenge:
Drones seem to be the future of post deliveries, but how is it going to work? Join us to reproduce a swarm of drones delivering parcels through a city to have a glimpse at this future!
The challenge the teams got was to deliver as many parcels within 5min in a miniature city, 4m x 4m, using Crazyflies. Since the Crazyflies can’t carry that much payload the parcels was just digital/imaginary but had to be picked up at a pick-up zone. They were allowed to use up to thee Crazyflies simultaneous to increase capacity. For more details checkout the challenge description.
To manage the challenge ELCA developed the CrazyServ which uses a REST API to control Crazyflies, wrapping the high level position commander, and to pick-up parcels. One nice benefit with a server is that it can keep track of which parcels has been picked up and been delivered making the scoring fully automatic.
Bitcraze part in the challenge was to bring drones, technical support and our loco positioning system to make up the 4m x 4m city. Or actually three of them, as there were going to be six teams competing for the victory. The initial information was that the three systems would be installed in separated rooms, far away, but we ended up having them side by side. That left us with some live-hacking, changing from TDoA-2 to TDoA-3 so the anchors would not interfere with each other. We ended up using 12 anchors in total which gave enough precision for the PolyHackers to complete their challenge.
The PolyHack was a success and we had a great time. The winning team in our challenge, Electek Innovation, managed to deliver 19 parcels during the 5min with the use of a “loop” system. Congrats and well done! If you get inspired by this hackaton the CrazyServ is available on github! Together with a e.g. swarm bundle it shouldn’t be to hard to reproduce.
Thanks Telejob for letting us take part of this great event!
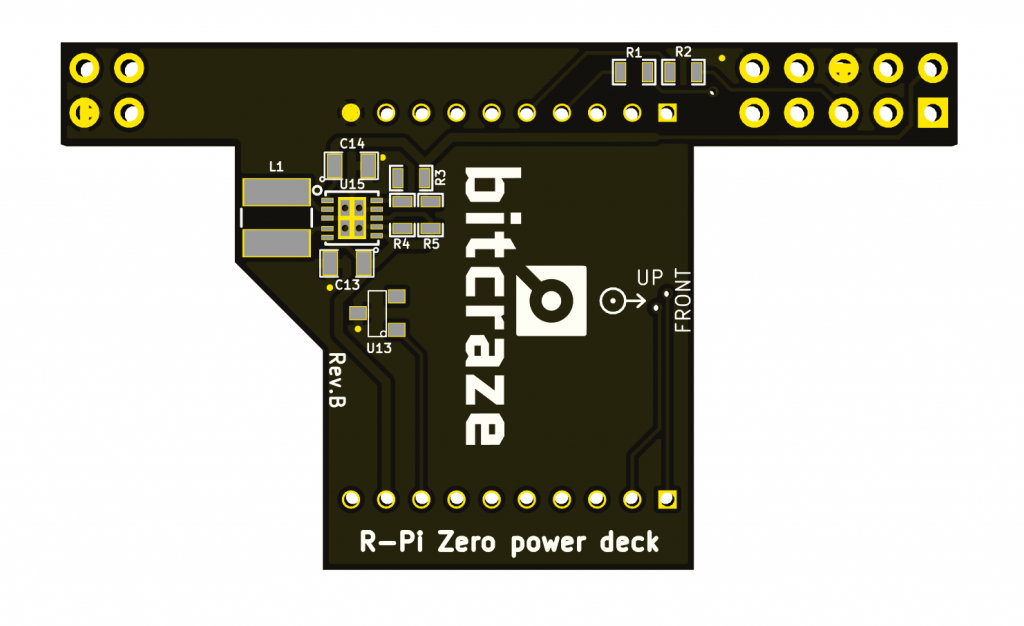
Ever since the Raspberry-pi zero was released we wanted to find-out what it would take to fly one with the Crazyflie 2.0. One immediate issue is the size and weight of the R-Pi-Zero. It is just a bit to big and heavy to make it work without modifying the Crazyflie 2.0. Also it requires 5V power which is something the Crazyflie 2.0 doesn’t provide if USB isn’t connected. Actually the R-Pi-Zero works well down to ~3.6V but this is still too high to reliably run directly from a single LiPo cell. So to begin with we created a Raspberry Pi Zero power deck. It is reusing the same step-up/step-down (STBB1) as used on the LED-ring to make things simple and the output is set to 3.8V. Other than that the UART and the I2C interfaced has been connected so that the raspberry pi zero could control the Crazyflie.
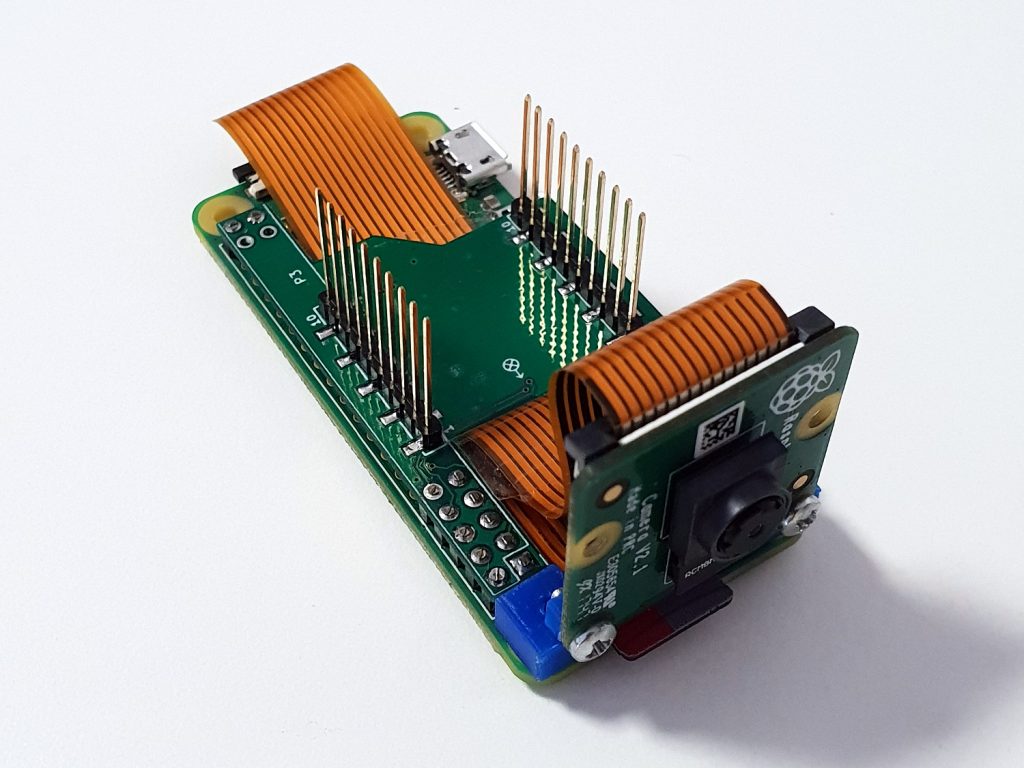
The raspberry pi zero would then be soldered to the deck with 0.1″ header pins. The result can be seen below and the power part works well. We chose to solder the deck header pins to the deck, instead of using the female deck connectors, to make it more sturdy. Another thing we did was fitting a Pi-camera using a 3D printed mounting bracket we designed. We think this is one of the interesting use cases, to run computer vision or maybe neural networks :-).
Well unfortunately this only solves the first part, powering the R-Pi-Zero from the Crazyflie 2.0. Next step will be to modify the Crazyflie 2.0 with bigger motors/props so that is can carry it for a decent time. So story to be continued…
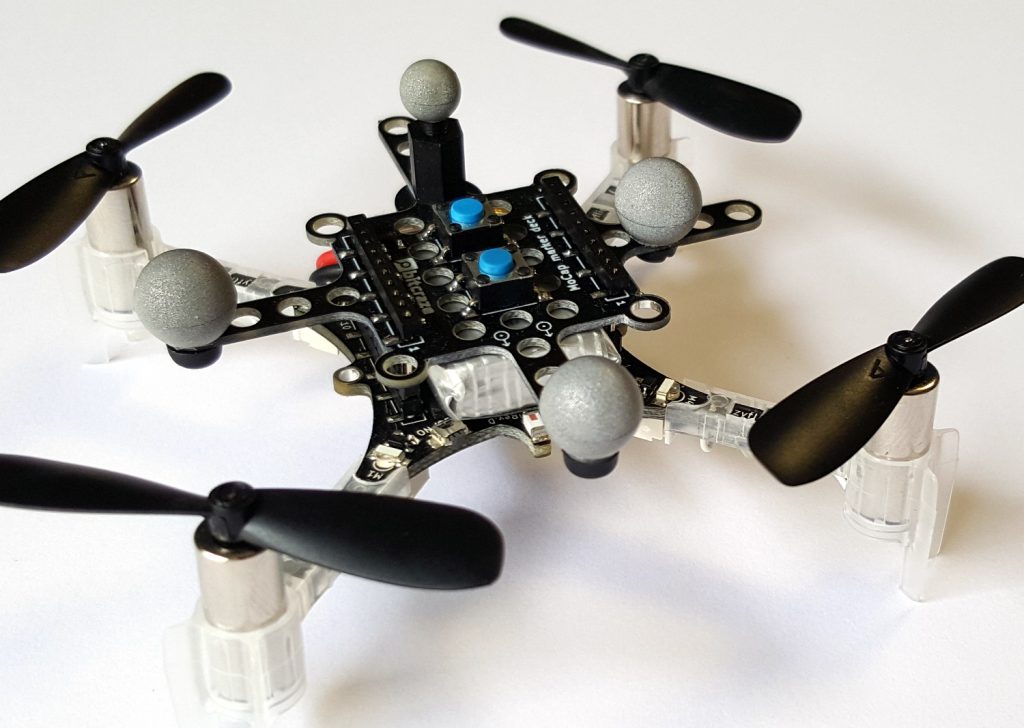
The Crazyflie 2.0 has been flyable in MoCap systems such as Qualisys, Vicon or Optitrack for quite a while thanks to the Crazyswarm project. For the MoCap systems to be able to track the Crazyflie it needs to be fitted with reflective markers. These can be attached on e.g the motor mounts which in some cases might be the best solution, however we also liked the idea of creating a deck where the markers easily can be attached and in many, repeatable configurations, that is why we created the Mocap deck. This deck is now soon to be released but before we start manufacturing it would be great to get some feedback.
The deck has M3 sized holes which is spaced on a 5mm grid. The deck also has footprints for two optional push buttons that can be used to e.g. trigger a take-off or start of a demo. And as the battery holder deck, which has no electronics, so this can be mounted upside down for better fitting of the markers, if the buttons aren’t mounted of course.
We are collaborating with Qualisys, also based in Sweden (in Gothenburg), to make the Crazyflie more moCap friendly and make it easy to use together with the Qualisys system as well as other mocap systems. Qualisys will provide the markers for the moCap deck.
Qualisys and Bitcraze are exhibiting together at IROS in Madrid where we will show some awesome demos with a moCap system as well as other position technologies and we are also hoping to fly a Crazyswarm. We will publish more information when we get closer to the conference.
We have been flying swarms in our office plenty of times. There is kind of a limitation to this though, our flying space is only around 4 x 4 meters. Flying 8 – 10 Crazyflies in this space is challenging and it is hard do make it look good. Slight position inaccuracy makes it look a bit sloppy. To mitigate this we decided to have a small swarm show using a a bigger flying space and to invite families and friends, just to raise the stake a bit.
As usual we had limited time to accomplish this, and this time the result should be worth looking at. Well, we have managed to pull off hard things in one day before so why not this time… The setup is basically a swarm bundle with added LED-rings. Kristoffer took care of the choreography, Tobias setting up the drones and Arnaud configuring the Loco positioning system.
Choreography
Kristoffers pre-Bitcraze history involves some dancing and he has been playing a bit earlier with the idea of creating choreographies with Crazyflies. One part of this was a weekend-hack a few months back when he tried to write a swarm sequencer that is a bit more dance oriented. The goal was to be able to run a sequence synchronized to music and define the movements in terms of bars and beats rather than seconds. He also wanted to be able to define a motion to end at a specific position at a beat as opposed to start on the beat. As Kristoffer did not have access to a swarm when he wrote the code he also added a simple simulator to visualize the swarm. The hack was not a complete success at that time but turned out to be useful in this case.
The sequences are defined in a YML file as a list of time stamps, positions and, if needed the color of the LED-ring. After a few hours of work he had at least some sort of choreography with 9 Crazyflies moving around, maybe not a master piece from a dance point of view but time was running out.
The simulator is super basic but turned out to be very useful anyway (the color of the crosses indicates the color of the LED ring). We actually never flew the full sequence with all drones before the performance, but trusted the simulation to be accurate enough! We did fly most of the sequence with one Crazyflie, to at least make it plausible that we got it all right.
Short snippet from the simulation
Setting up drones
Handling swarms can be tedious and time consuming. Just making sure all drones are assembled, fully operational and charged is a challenge when the number increases. Tobias decided to do manual flight test of every drone. If it flies well manually it will most likely fly well autonomously. The testing resulted in switching out some motors and props as vibrations is a crippling factor, especially for Z accuracy. Takeaway from this exercise is to implement better self testing so this can be detected automatically and fixed much quicker.
Loco Positioning System
We ran the positioning system with standard firmware in TDoA mode to support multiple Crazyflies simultaneously. The mapped space was around 7 x 5 x 2.5 meters and the anchors were placed more or less in the corners of the flying space box.
The result
The audience (families and friends) was enthusiastic and expectations high! Even though not all drones made it all the way through the show, the spectators seemed to be duly impressed and requested a re-run.
It is now the first day in 2018 and a good day to look back at 2017. Its been a busy year as always and we have had a lot of fun during the year. One of the first things popping up is that things takes so much longer then we think. Luckily we are working with open source and the progression is not only dependent on us as we have awesome help from the community. We are already really excited about what’s coming in 2018, looking forward to working together with so many great people!
Community
The Crazyflie 2.0 is still gaining attention and are becoming more and more popular among universities around the world. We see interest from researchers working with autonomous systems, control theory, multi-agent systems, swarm flight, robotics and all kinds of research fields, which is really great. This means that a lot of exciting work have been contributed by the community, so here is a small summary of what has happened in the community during the year.
In the beginning of the year the Multi-Agent Autonomous Systems Lab at Intel Labs shared how the Crazyflie 2.0 is used in their research for trajectory planning in cluttered environments. We wrote a blog post about this if you want learn more about their work. The Crazyflie showed up on the catwalk of Berlin Fashion week being part of fashion designer Maartje Dijkstras futuristic creation TranSwarm Entities”, a dress made out of 3D prints accompanied by autonomously flying Crazyflies.
For the third year Bitcraze visited Fosdem. We had a good time and got to hang out with community members like Fred how did a great presentation about what’s new in the Crazyflie galaxy. During the conference we took the opportunity to present the Loco positioning system and demo autonomous flight with the Crazyflie controlled by the Loco positioning system. In the demo we flew with the non-linear controller from Mike Hammer using trajectory generation from Marcus Greiff.
We have had a few interesting blog post contributions during the year from major universities. Including a guest post written by researchers at Carnegie Mellon University. The researchers are using the Crazyflie 2.0 drone to create an adaptive multi-robot system. Similar work has been done by the researchers at the Computer Science and Artificial Intelligence Lab at MIT were they have been studying coordination of multiple robots, developing multi-robot path planning for a swarm of robots that can both fly and drive.
We have also had two interesting guest blog post from the GRASP Laboratory at University of Pennsylvania, the “A Flying Gripper based on Modular Robots” and “ModQuad – Self-Assemble Flying Structures“. Inspired by swarm behavior in nature, for instance how ants solve collective tasks, both projects explore the possibilities of how multiple Crazyflies can work together to perform different missions.
During the fall Fred took the time to pay us a visit at the office in Sweden and worked together with us. He is making great progress on the Java Crazyflie lib that is going to be used in the Android client as well as in PC clients. It will allow to connect and use a Crazyflie from any Java program, there has already been some successful experimentation done using it from Processing.
Some other great news is that thanks to Sean Kelly the Crazyflie 2.0 is now officially supported by the Betaflight flight controller firmware. Betaflight is a flight controller firmware used a lot in the FPV and drone racing community.
Finally The Crazyswarm project, by Wolfgang Hoenig and James A. Preiss from USC ACTlab has been presented at ICRA 2017. It is a framework that allows to fly swarms of Crazyflie 2.0 using a motion capture system. There is currently some work done on merging the Crazyswarm project into the Crazyflie master branch, this will make it even easier to fly a swarm of Crazyflie. In the meantime the project is well documented and can be used by anyone that has a couple of Crazyflies and a motion capture system.
Hardware
During 2017 we released four new products. Beginning with the Micro SD-card deck which e.g. makes high speed logging possible. Then the Z-ranger that enables a height hold flight mode up to 1m above ground. We like to call it drone surfing as that is very much what it feels like when flying. We ended by releasing two boards, Flow deck and Flow breakout, in collaboration with Pixart containing their new PMW3901 optical flow sensor. The Flow deck enables scriptable flight which is very exiting. That lead us to release the STEM drone bundle which we hope will inspire people to learn more about flying robotics.
Hardware prototypes, our favorite sub-category, are something we have plenty of lying around here at the office. To name a few, a possible Crazyradio 2, the Loco positioning tag, the Crazyflie RZR, the Glow deck or Obstacle avoidance/SLAM deck. It takes a long time making a finished product… Hopefully we will see more of these during 2018!
Software
At the same time we released the Flow deck we also released the latest official Crazyflie 2.0 FW and client (2017.06). This enables autonomous capabilities as soon as the Flow deck is inserted by automatically turning on the corresponding functionality. Just before that, the loco positioning was brought out of early access with improved documentation and simplified setup. Since then a lot of work has been put into making a release of TDoA and improving overall easy of use. With the TDoA2 and automatic anchor estimation starting to work pretty well we should not be far from a new official release!
We would like to end 2017 with a big thank you to our users and community with this compilation video. Make sure to pump up the volume!
This year we decided to celebrate the holiday by painting a Christmas tree, rather than dressing one like last year. What better way to do this that with the flow deck, a LED-ring and a long exposure photo. To check out all the yummy details and how to DIY check out this hackster project we made. Also as an Christmas extra we made this light painting video with the LED-ring mounted on top of the Crazyflie 2.0 and a bit of video editing. To be able to mount the LED-ring on top we hacked together an inverting deck. Not a bad idea and something we aim to release in the future!
Getting started
For those of you that was lucky and got a Crazyflie 2.0 under the Christmas tree, here is a short intro to get you started.
When you are comfortable flying the Crazyflie you might feel that it is time for the next step, to make use of the flexibility of the platform. After all it is designed to be modified!
Check out the “Getting started with development” tutorial to set up your development environment, build your first custom firmware and download it to the copter.
Maybe you want to add a sensor or some other hardware? Heat up your soldering iron and dive in to it! Find more information about the expansion bus on the wiki. The wiki is the place to look for all product and project documentation.
All source code is hosted on github.com/bitcraze and this is also where you will find documentation related to each repository.
Open source is about sharing, creating something awesome together and contribute to the greater good! Whenever you do something that you think someone else could benefit from, please contribute it! If you were curious or confused about something, someone else probably will too. Help them by sharing your thoughts, insights and discoveries.
Can not find the solution to a problem? Don’t understand how or what to do? Have you read all documentation and are still confused? Don’t worry, head over to the forum and check if someone else had the same problem. If not, ask a new question on the forum and get help from the community.
So we are now back in the cold and dark Sweden after about a weeks visit to a warm and nice Shenzhen, China. Every time we go there something major has happened. When we visited last time, about a year ago, cash was king. Now apparently payments are done with QR codes, even in small lunch restaurants. And I was kind of proud about the BankID and Swish payments we have here is Sweden, until now… Another observation we did was that there are now a lot of colorful rental bikes which can be found about everywhere and which can be rented for around 1 RMB/hour. A great way of resource sharing and pushing Eco-friendly transportation. It has it downside though as piles of bikes could be commonly found and e.g. written about by theguardian.
Aside from the above observations the Maker Faire Shenzhen was one of the reasons we came to visit. As Shenzhen is called the “the silicon valley for hardware” we had pretty high expectations when coming to the Maker Faire. Even though it was a great Faire it did not really reach our high expectations but it is growing fast and I’m pretty sure in a couple of years it is the Maker Faire to be at. A quick summarize, robotics was one of the top categories of products on the faire. 3D printers which are popular on European and US faires was not that common which surprised us. Now let the pictures do the talking:
We exhibited on the faire sharing booth with Seeedstudio where we showed an autonomous sequence on top of a table using the flow deck. By pressing a button, the Crazyflie 2.0 would take of, fly in a circle, come back and land roughly in the same spot. It was a very engaging demo catching many peoples attention and especially the kids. The kids constantly wanted to press the button and interact with the Crazyflie.
All the interaction made us very happy and next time we will try to add the obstacle avoidance deck to make it even more engaging.
Unfortunately the Crazyradio PA is out of stock in our store and is estimated back around December 1. Until then please checkout our distributors for availability.
A long time ago we got a request for a bright LED deck from a community member. When working with high powered leds heat becomes a problem that needs to be taken into account. From the community member we got suggestions of using one of the luxeon rebel leds and so we did. We designed a prototype pretty quickly but also realized that it is a bit harder than we first thought. If using a simple control scheme such as PWM and a mosfet the circuit is simple but brightness will be effected by battery voltage. Using a dedicated LED driver the brightness would be stable but the circuit more complicated and expensive. Trying to list the pros and cons:
MOSFET
+ Low complexity
+ Low cost
+ High efficiency
– varying brightness depending on battery voltage
– Might stress LED (could be solved with low ohm resistor)
LED driver
+ Stable brightness
+ Not as high efficiency (~80%)
– Higher cost
– Higher complexity
We ended up trying booth. The LED driver design failed due to that the battery voltage needed to be lower than the LED voltage + schottky and it is just in the middle. The PWM design half failed since the LED anode and cathode was swapped in the design but was possible to patch afterward. So at least we got something up and running.
The effect is very nice and it is what we used for the wedding show. The question now is, is this something we should finish and put in the store?