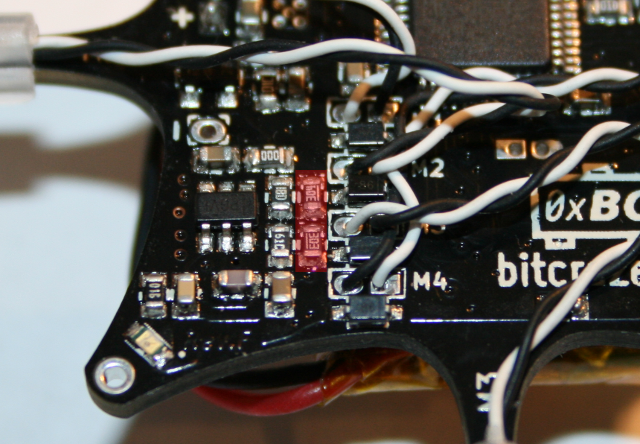
For a while Invensense’s gyros has been the MEMS sensors to use in multirotor applications due to their good performance and vibration rejection. ST Microelectronics are also big when it comes to MEMS sensors but their gyros has not been that good when it comes to handle vibrations. In the beginning if 2013 they released the 3-axis gyro L3GD20 which are advertised to improve this and we thought we finally would do an investigation. So we bought a Pololu AltIMU-10 board which has ST sensors and also the iNEMO module, LSM9DS0, which is a very sweet 9-axis 4x4x1mm chip. After a bit of a soldering exercise we got them both attach to an accompanying Crazyflie. The AltIMU-10 board we glued to the bottom and connected to the expansion I2C buss. The LSM9DS0 was a bit trickier and we removed the MPU6050 and used some of its components for the LSM9DS0 so we could glue it up-side down to the board. I think the picture speaks for itself. After some quick and dirty coding we managed to get them both working and flying. The flying capability is very similar to the MPU6050 and we can’t really tell the performance apart. We will have to investigate it in more detail and for that we are adding a SD Card breakout to write raw data from all sensors at full speed. That will be the exercise for next week so stay tuned!
[pe2-gallery album=”http://picasaweb.google.com/data/feed/base/user/115721472821530986219/albumid/5941229033309217905?alt=rss&hl=en_US&kind=photo” ]