A lot of you are using our forum on a regular basis. From our point of view, we prefer giving support and guidance on our forum instead of by email, since solutions we provide to our users can be found by others as well. However, we are experiencing some spam-related issues with the forum!
Somewhere last week, our forum started getting some weird posts, including some links to websites that are…. not exactly Bitcraze or Crazyflie related… We didn’t think about it too much, so we cleaned the forum, deleted the users responsible and moved on. But the very next day more spam post appeared, and it was getting so bad that we changed our sign-up from the regular security question to Captcha. Unfortunately, spambots are way too smart these days, so that didn’t work either… By the end of the weekend we had to remove over an hundred spam accounts and 500 spam posts!
The forum is experiencing a major spam attack at the moment and the usual security measures are not helping. Since yesterday, we enabled manual activation of new users (meaning that we physically need to approve each account), since currently this is the only way to catch the dodgy new accounts (we already caught over 100 in one day alone !!). This week we will look into other measures and plugins to better secure our forum, so we don’t have to manually go through all the newly registered users to see if they are not spam bots. We heard about Cleantalk by one of our users, so we probably will give that a go!
However, please be contact us if the following occurred or is occurring to you in our spam removing frenzy:
If we accidentally removed a post of you
If we removed or banned your account
If we are not activating your new account
Also make our lives a bit easier this week, and send us an email straight away if you have just have made a new account on the forum. Send an email to: contact@bitcraze.io with your username and a sentence about why you are using the Crazyflie (so we know that you are real).
This is only a temporary solution, so hopefully at the end of this week or the next we will not need to worry about this anymore :).
Our usual blog posts usually consists of the awesome new products and demos that we make here at Bitcraze, but now we will talk about… documentation! Alright alright, it is maybe not the most thrilling topic, however you should be excited about it! Good documentation about the Crazyflie and its tools will not only enable you to recreate the demos and the work of others, but also to implement your own ideas and to contribute to our open-source firmware.
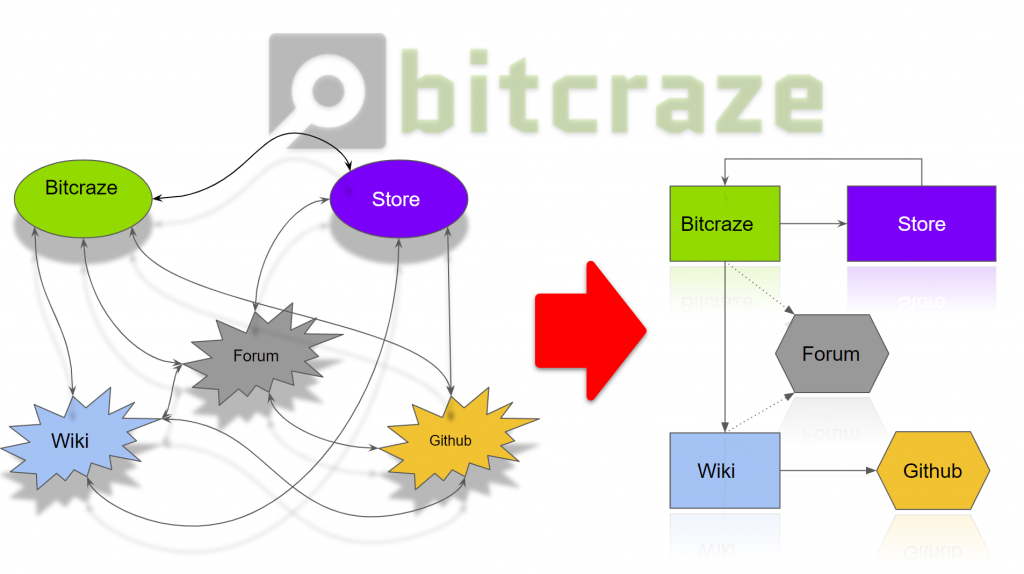
In the years that Bitcraze has been around, there has been quite the build-up of information, which can be either found on the main website, the wiki, the github repositories, and in bits & pieces on the forum. Although we try to provide all the information necessary for getting started with development, it is currently quite a clutter. If we at Bitcraze already have difficulty of finding and maintaining all the documentation, we can only imagine how difficult it would be for a starting developer. We therefore would like to improve the flow of information dramatically!
Here are some ideas of what we would like to do with the documentation:
Moving product information to the shop.
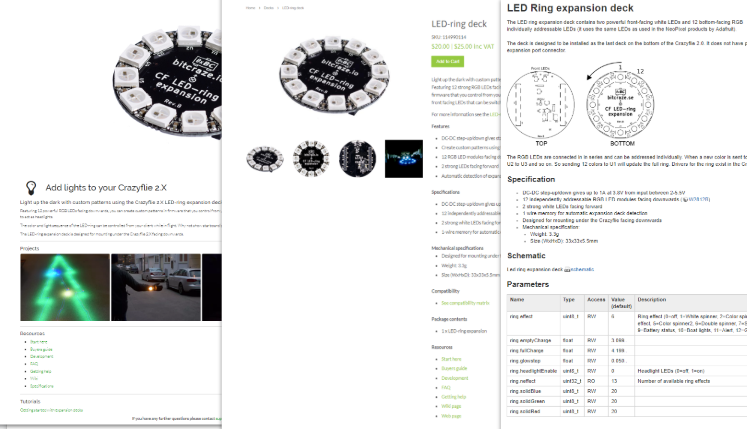
LED ring expansion deck in the main website, shop, and wiki.
Currently there are three different locations where you can find information about physical Crazyflie, localization systems or expansion decks, which is the main website, the online store and the wiki. We see that a lot of electronic and hardware shops usually put all the details of the product directly on the product page of their shops. We aim to do that as well, since there will only be one page for users to go to for schematics, specifications, instructions and more, and for us it will be also easier to maintain and update any product information
Moving Software Info to GitHub
There is a lot of bits and pieces of information to handle the firmware on the Crazyflie and all the tools in the tutorials on our main website, wiki and Github repository. This again makes a lot of duplicate information, which is difficult for us to maintain and therefore gets easily outdated. We could put all the information on the wiki, but what if somebody changes something in the code which requires a change in the procedure as well?
Create a /doc folder on the repositories to better structure all the information
Add more Doxygen comments to all the function in the the codes and automatically generate documentation for this.
Restructuring the Wiki Content
After moving all the hardware- related content to the shop, and moving all the firmwar- related info to the Github repositories, we will need to think about what we want to do with the Wiki! You would think that there is nothing left to put on the wiki anymore after the replacement of the earlier documentation, but we beg to differ! For instance, there is so many Github repositories that there is a really a need for an overview. The wiki can educate developers on which tools we have an how to properly use them. Of course, we already have the getting started tutorials, but we want to also provide a more in-depth explanation of the overall structure and how the different repositories would need tho work together, like this .
This does mean that we would need to restructure the wiki entirely and only focusing on topics like:
System Architecture Crazyflie
Communication protocol between STM and the NRF
Communication protocol between the Python library and the Client
Overview Github-repositories
Projects and hacks
etc etc
What do you think?!
Of course we can change all we want in the documentation, but you guys are the ones who actually use it! We are very curious of what what you think of the plans and give us more tips or suggestions on how to improve the overall documentation experience. Please leave a message below or express your opinion on this forum thread.
Two weeks ago we posted about the demo we did for our new office move-in party. There has been multiple requests to share the script but unfortunately this is a hacked old script that is not going to be useful at all as an example. So, last week, we made an example that could run a synchronized swarm sequence.
The example has been pushed in the example folder of the Crazyflie-lib-python project. It is called synchronizedSequence.py. Running this example unmodified with 3 Crazyflies in a positioning system will give you this result. (Like the previous demo, this was done in a lighthouse system.)
One of the key design of the example is that it is based on a single control loop that can be synchronized with an outside system: in this example, there is a simple sleep of one seconds between each step of the sequence but it could for example be changed into a midi clock receiver to synchronize the sequence with music.
The example was developed with the help of Victor, a student we have hired to help-out during the summer. He has then played around a little bit to make a 9 Crazyflies sequence that is more impressive:
I uploaded Victor’s sequence in a github gist as it can be good for inspiration. One bit of warning though: as is, the sequence contains some vertical movements that are quite aggressive and the part where Crazyflies fly directly on top of each-other is more to be considered as a stress test.
Summer is here and temperatures are rising. Since many of us will be on holidays, we will focus this quarter on a special summer clean up! See here what we are working on:
Fixing issues: This time we are aiming to close many of the issue tickets in our Github repositories, so that after the summer everything will run much more smoothly (we hope!). Definitely our test rig will come in very hand to sniff out more issues in terms of radio communication as well. You can help as well! Everybody who is using and developing on with the STM-firmware,NRF-firmware or python library, or anything else and is noticing issues, please make a ticket in that same Github repository (if you are familiar with the code) or post about it on our forum (if you do not know exactly what is going on). Together we can make the code better.
Lighthouse calibration: In March we released our lighthouse deck for positioning with the HTC Vive base stations. We did feel that the setup process could be improved further, since currently, the Crazyflies’ firmware must contain hardcoded information of the Steam VR’s base station position. We will try to apply the factory calibration direct from the Base stations itself. This will enable us to do 2 additional things: (1) The Crazyflie with the LH deck itself could be used to setup the Lighthouse system, so that SteamVR would not be necessary anymore. (2) Only 1 base station is needed for positioning instead of 2, which will improve the robustness in case of loss of visual-line-of-sight of one base station.
Documentation: We try to provide all the possible information for everybody to be able do anything they want with their Crazyflie. But with high flexibility comes great responsibility…. for proper documentation! We are planning to restructure all of our media outlets and try to improve the flow and level of detail for our users. We hope to make it easier for beginning developers to get started and more advanced developers to gain better understanding of the system in order to implement their own awesome ideas. So our very first step is to restructure and clean up the Bitcraze wiki and see where we can add more content.
Products: We have a lot of products coming out in the 2nd half of the year
AI Deck: We are working hard to get the AI deck all ready for production and we are estimating that they will be available for early access in late autumn. Keep a look out on our forum for regular updates on the progress!
Lighthouse breakout board: We made our first working prototype of the lighthouse breakout board, which should make it easier for the lighthouse positioning system to also work on other platforms than the Crazyflie.
Active Marker Deck: We are very much on on track with the Qualisys active marker deck! It should be available in the Autumn.
Crazyflie Bolt: This has been send off to production for the early access version, which should be available in the Autumn!
We have recently moved to a new bigger office. With the summer arriving in Sweden, it was time to organize a small move-in after-work party with friends and family. For the occasion we wanted to play around with a small swarm of Crazyflies and the new Lighthouse positioning. Time being a sparse resource, we setup the ICRA2019 demo in the flight lab so that we would be able to fly during the party. We also started looking at our old swarm show that we ran with the LPS a year ago to see if we could run it with Lighthouse:
The show was a essentially a sequence of setpoints sent from a python script and controlling 9 Crazyflies 2.1 equipped with Lighthouse deck on the top and led-ring deck on the bottom synchronized on music. We setup the Crazyflie in the Lighthouse positioning system and converted the script to use the high-level-commander GOTO setpoints. We look forward at trying more advance control problems like trajectories to make more impressive synchronized flight choreography in the future but for now it already look quite good even with only GOTOs:
We have now come to a the point were we will start manufacturing of the Crazyflie Bolt, Formally known as the RZR. You might wonder why we changed the name… Well the RZR more implies it is a Racer quad and it really isn’t. This is mainly because of the design in power distribution which is limited to around 8A per motor. However by using your own PDB it will work well for that too. But that is not the intention, it is more intended to have the strengths of the Crazyflie 2.1 but in a slightly bit bigger package. Therefore we wanted a better name for it and after a brainstorming session we came up with the name, Bolt. Both as it is a Crazyflie building block, a bolt used to fasten things, but also because it has the potential to be fast, as in a lightning bolt. Great name right :-)
The CF-Bolt development has been pushed back many times because of other more promising products, but finally it is getting here. If things goes according to plan, the Crazyflie Bolt should be in our shop in Aug-Sept. If you want to read up on the history and what it is all about read about the first flight to the almost-final prototype here.
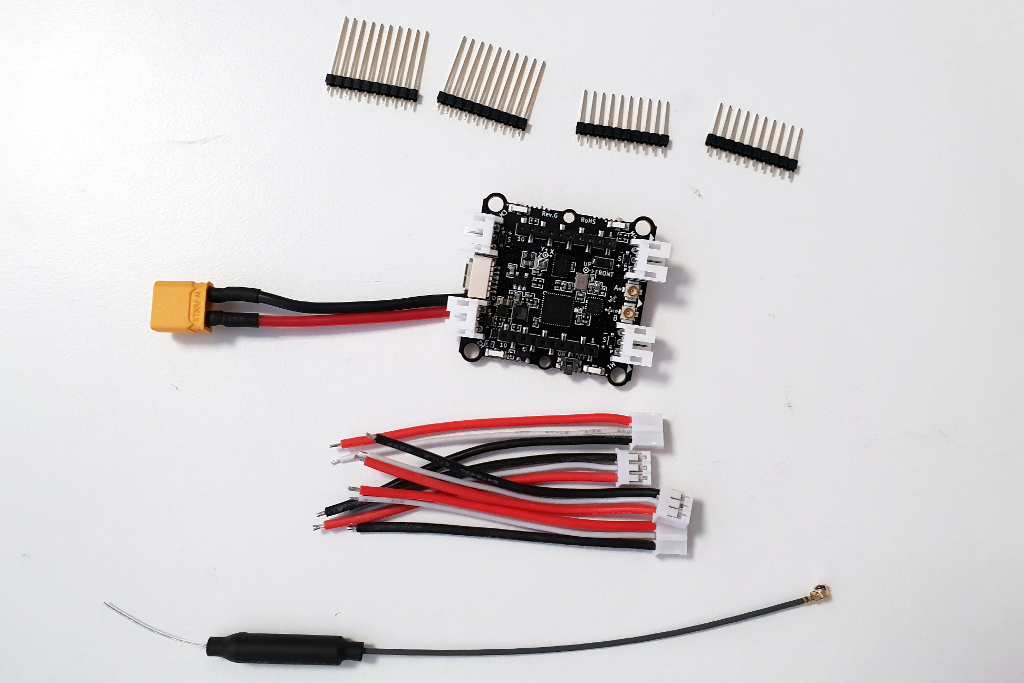
A quick recap of the features:
Fully compatible with the CF2 firmware, expansion decks as well as radio.
Connectors to attach motor controllers (also possible to solder though) so it is easy to build and repair.
Power distributions built into controller board. (Max ~8A per motor controller) with XT30 connector.
Motor controllers can be switched off by the system (MOSFET) so the system can go into deep sleep and only consume around 50uA.
Voltage input 1S-4S (3V to 17V).
Standard mounting (M3 mounting holes spaced 30.5mm in a square).
Many of our users are flying larger and larger swarms and we’ve been getting some feedback that there’s communication issues when connecting to many Crazyflies. So during the last weeks we’ve been looking at this. Among the things we’re doing is building a test rig where we can automate the communication testing (last weeks blog post). We’ve also fixed a few communication issues listed below.
One of the issues causing problems is dropping packages coming in to the Crazyflie. If the flow of packages was too high to one CRTP port these would start dropping. This has now been fixed by increasing the length of the queues for each port. (GitHub issue)
Another issues has been logging data piling up after disconnect. The detection for the radio disconnection was boken so logging data would continue to be generated and pushed into the communication stack. This has now been fixed so logging will be reset which should clear up he congestion on the next connect. (GitHub issue)
Lastly we also fixed the USB communication issue with dropped packages and crashing when the USB was disconnected. (GitHub issue)
We’ve already noticed a few other issues when using the rig so there should be more fixes coming soon. In the meantime test out the new firmware and let us know if there’s still issues.
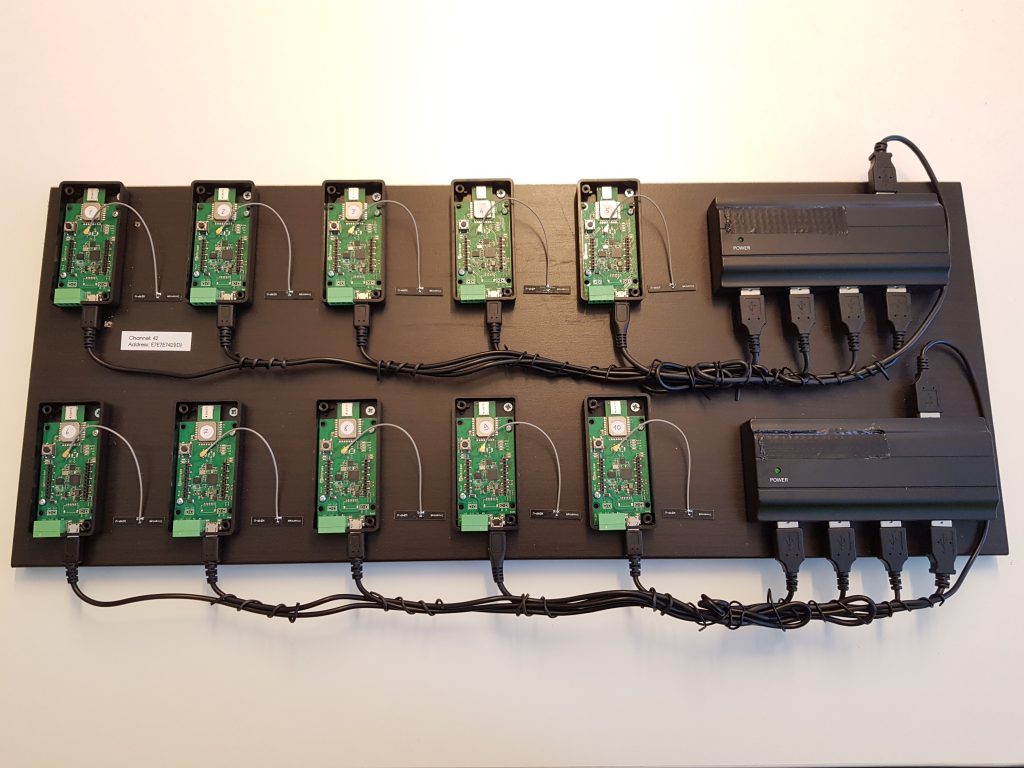
While running our ICRA demo, we came across a bug in the Crazyflie python-lib radio handling, limiting the number of Crazyflie that could be controlled using one Crazyradio PA. Communication with many Crazyflies is crucial as flying swarms is becoming more of an interesting topic for research and education. So we decided to take the problem at hand and create a radio test-bench:
To make the test-bench we have attached 10 roadrunner boards to a plank of wood together with USB switches that can provide enough power to the roadrunners. We used the roadrunner because it is mechanically easier to use in this context and it has an identical architecture to the Crazyflie 2.1 when it comes to the radio implementation.
Initially we will use the test-bench to run test scripts that pushes the communication to its limits and that consistently test the communication stack functionalities. This should allow us to find bug and verify that we solve them as well as discovering and documenting limitations.
Eventually we want to connect a raspberry-pi to the test-bench and run tests for each commit and pull-request to the crazyflie-firmware, crazyflie2-nrf-firmware and crazyflie-lib-python projects. This will guarantee that we do not introduce new limitations in the communication stack. The test-bench will also be very useful in implementing new functionalities like direct crazyflie-to-crazyflie P2P communication.
As a final note, the Crazyswarm project is not affected by the Crazyflie-lib bug since it is using the C++ implemented crazyflie-ros driver. Hence Crazyswarm can control more Crazyflies per Crazyradio PA, so it is still the preferred way to fly a swarm mostly when using a motion capture system. Though, with the progress made on LPS and Lighthouse positioning, running swarms, using the python API directly is a probably a more lightweight alternative.
3 of us where at ICRA 2019 in Montreal last week, where we met a lot of interesting people and a lot of Crazyflie users. Thanks a lot to everyone that drop by our booth, and for the ones that missed it we are planning on being at iROS2019 later this year so we might see you there :-).
We have already described our demo in a previous post, now that we run it we can update on how it went. We are also updating the ICRA2019 page with the latest source code and information so that anyone interested can reproduce the demo.
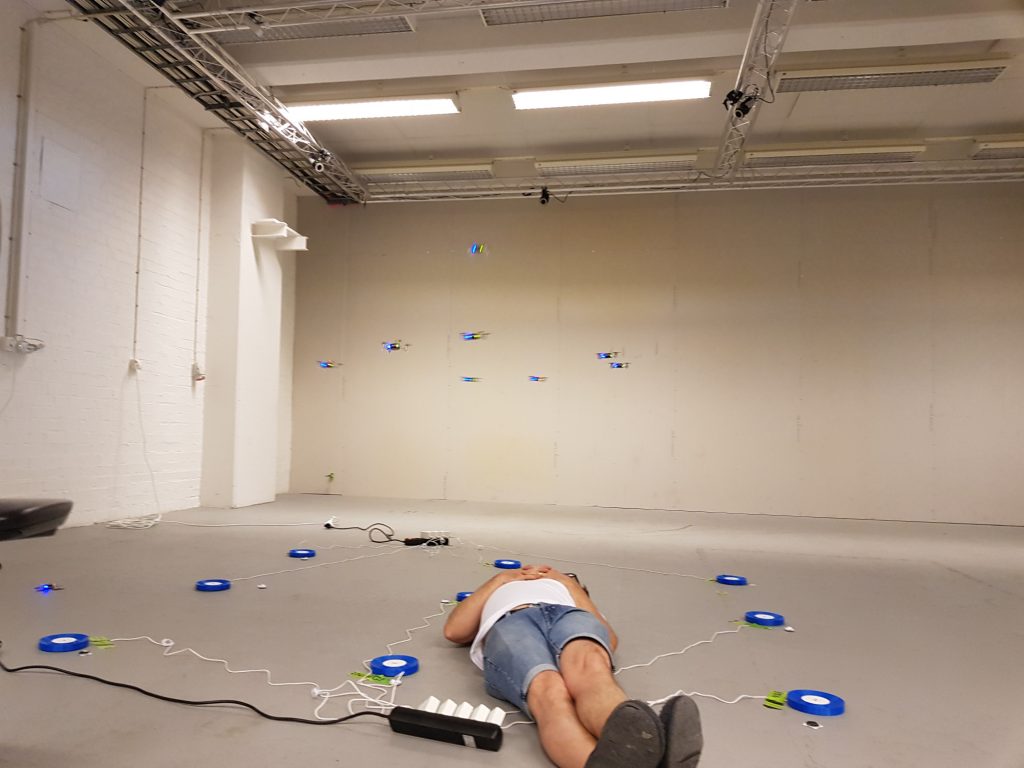
In its final state at the conference, the demo contained 8 Crazyflies 2.1 equiped with Lighthouse deck and Qi charger deck. There were 8 3D-printed charging pads on the floor with Ikea Qi wireless chargers and two HTC Vive base stations (V1) on tripods. The full system was contained in a cage, built from 50 cm-long tubes or aluminium and nets.
The full setup of the booth took us about 4 hours, this included about 3 hours for the cage, 15 min for the demo including calibration of the lighthouse base-station geometry and the rest to fine-tune things. This is by far our best setup time, we still need to prettify the cage a bit and to make is easier to install, but we will most likely re-use this system for upcoming conferences.
In this demo we aimed at keeping a Crazyflie in the air at every moment, to do so we had a computer connected to all 8 Crazyflies sending to one of them the signal to start flying if no other where actually in the air flying a trajectory. The flight was completly autonomous as we explained in our previous blog post. We setup the Crazyflie to fly 2 cycles and then land, which increase the rate of swap and so increased the ‘action’, though it also meant that during the swap two Crazyflies where flying. This drained the batteries a bit more than expected and meant that after about an hour all the Crazyflies where bellow the take-off threshold and we had to wait ~30 seconds between flights. Here is a video of it in action:
The demo was very care-free, we had very few Crashes and we mostly restarted the Crazyflies to swap batteries manually to add a bit of power in the swarm. The last day we decided to spice it up a little bit by adding a chair in the cage and by calibrating the chair position and flight trajectory, we managed to have the Crazyflie partly fly under it. This worked quite well most of the time and showed that the lighthouse positioning is repeatable and works fairly well with short occlusion in the path. Though we also found out that even though a single Crazyflie would always fly the same trajectory, two different Crazyflies will not. We think differences in propeller stiffness and the fact that the our Mellinger position controller has not been calibrated for changing YAW are the main reasons.
If you want to know more about the demo or if you want to reproduce it do not hesitate to visit the ICRA 2019 page that explains it in more details and links to the source code of everything including 3D printed parts for the cage and the landing pads.