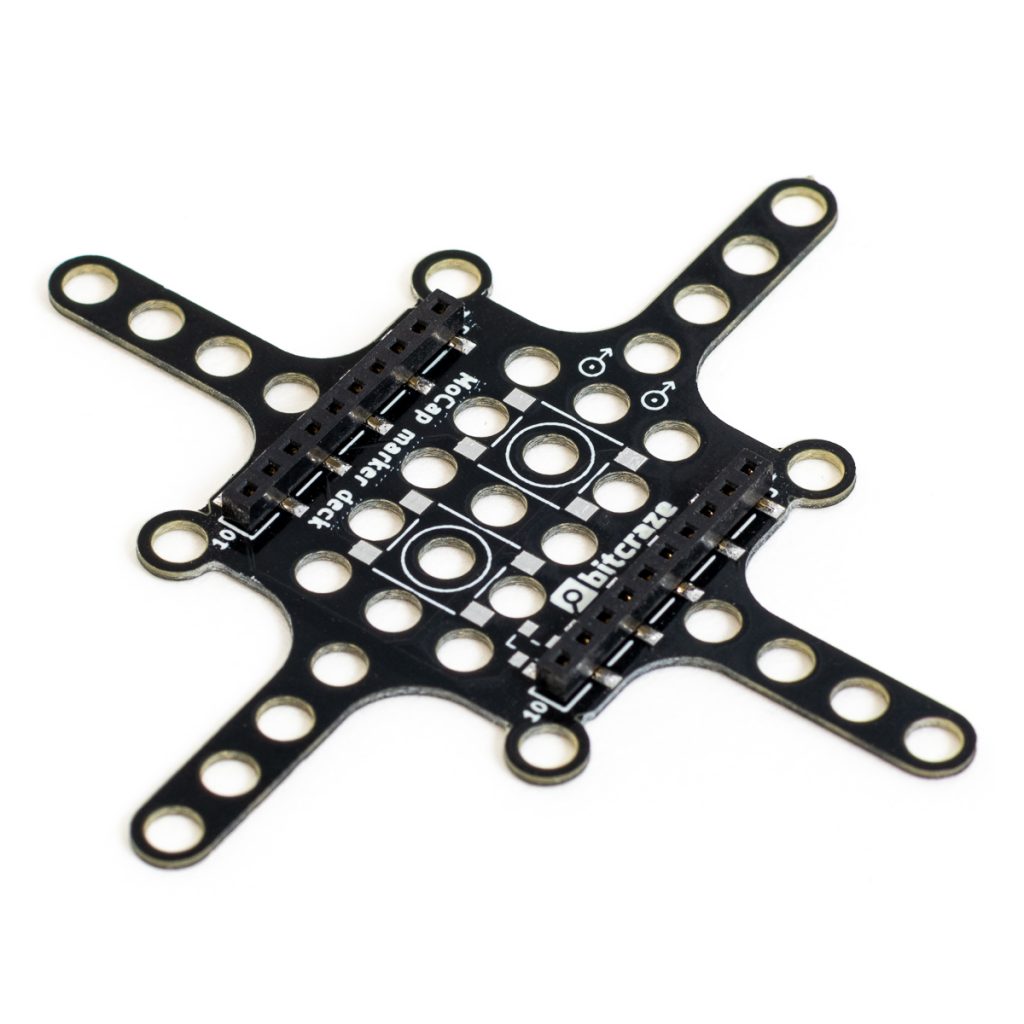
As part of our collaboration with Qualisys we are helping them developing an active marker deck for their motion capture cameras. One of the major benefits with an active marker deck is that it can have an ID, thus it is much easier to track each Crazyflie in e.g. a swarm. Another benefit is an increased range compared to passive markers thanks to high power emitting IR LEDs.
Active marker deck mounted on a Crazyflie
We are currently only in the prototype stage but we have already managed to do initial fight tests so hopefully we can release it within a couple of months.
We will bring some prototypes to ICRA 2019, come and visit us and Qualisys to check the deck out.
We attended the Innovation Week at Lund University on Thursday last week. Primarily we wanted to talk to students and possibly find future colleagues (yes, we are hiring) but it was also a good opportunity to get some demo time with the Lighthouse positioning system.
The demo setup. A bit blurry, sorry!
As mentioned in an earlier blog post, we are going to ICRA in May and we have started to think about what to demo. The main feature will of course be the Lighthouse deck. The setup at Innovation week also served the purpose of a first iteration for the ICRA setup.
We reused an old cage that we created for another fair a couple of years ago, built from a garden tent. It turned out to be fairly wobbly and a bit heavy (steel tubing) considering we will bring it in our luggage to Canada. We probably have to rethink the construction a bit and see if we can change to aluminium.
We put the Lighthouse base stations on tripods, which worked like a charm in our flight lab. We found that we had a lot of problems calibrating the system, not to mention flying the Crazyflie, at the Innovation week fair though. It turned out that the floor was not as stable as one might expect and that the tripods were swaying when people walked by. We solved the problem by adding a tube to the top of tripod that was pushed against the ceiling and thus minimizing the movement. Experience from the real world is always useful!
The general idea for the demo at ICRA is to automate as much as possible to give us more time with visitors. With the high precision of the Lighthouse system, it should be easy to land the Crazyflies on Qi chargers to avoid changing batteries. We hope to set up 6-8 Crazyflies where one is always flying while the others are charging, and have the possibility to temporarily fly more Crazyflies for small swarms. It is still just ideas and we will not see the end result until we are at ICRA, but it will be fun to build!
As we have written about before we moved to a new office last month. One of the major reasons was the need for a bigger flight lab. This will enable us to do better testing and improve how we can develop things, especially our positioning solutions. Even though it is not a huge place, going from 4x4x3m to 8x8x3.5m and possibly 13x9x3.5m, is a great improvement for us. We call this great playground for the Arena as this is what it feels like for us :-). Very soon we hope to have our Qualisys MoCap system, Lighthouse and the Loco positioning running, maybe even at the same time.
The Arena
As a bonus this is a great pace to play HTC Vive VR games, we just need to get the wireless transmitter so we can make full use of the space!
Today we received a bunch of MoCap marker decks which means they are now available in our shop. This is a handy deck for those that flies in a motion capture system as it is easy to create different configurations and move between Crazyflies.
The deck is designed in collaboration with Qualisys. We suggest using 6.5mm, 8mm or 9.5mm diameter reflective motion capture markers. Currently we don’t offer the markers but soon we will also offer a bundle together with markers.
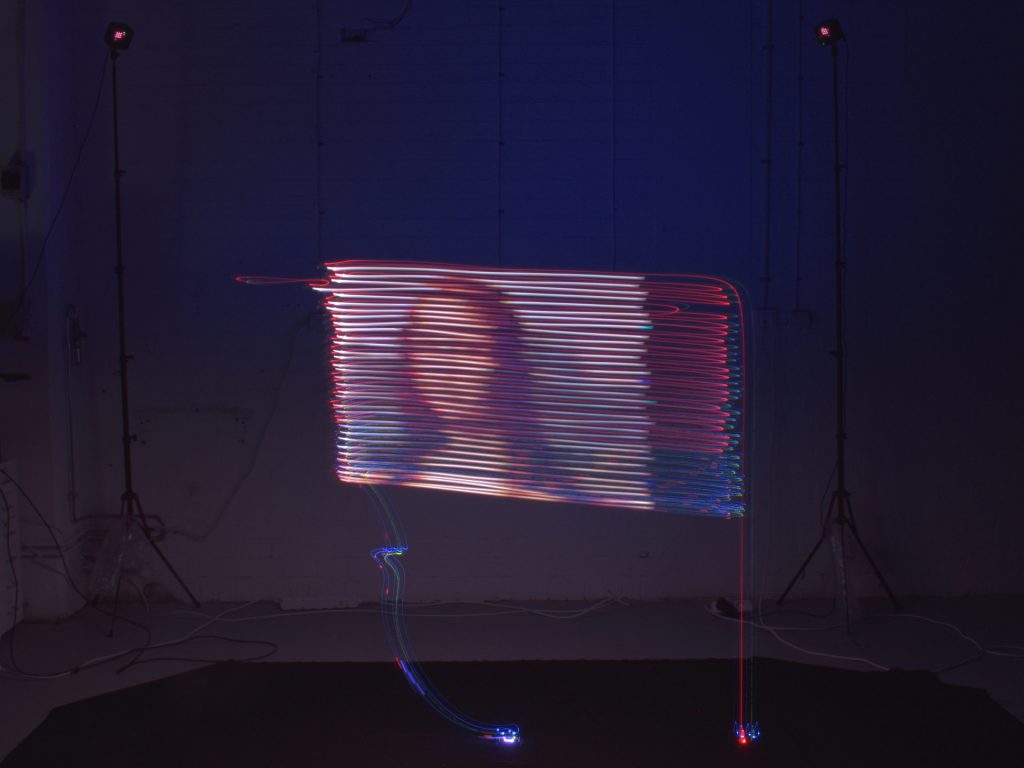
Last week we posted about painting with the Lighthouse deck. This week we continue on the same track but add a new dimension, all in our “let’s try this crazy idea” spirit. So last Friday, after having a lot of fun painting with the Crazyflie led-ring using long exposure photo and the Lightouse deck for positioning, we had one extra crazy idea. Can we use the Crazyflie to show a raster image, very much like the way a CRT monitor works by sweeping line by line and displaying the pixel color one by one, using the led-ring? Unfortunate we did not have enough time that day…
However the idea was so intriguing that Kristoffer couldn’t stop himself from writing a prototype script during the week-end. So last Monday, just after publishing the blog post, we went to the flight arena and tried it. After a couple of trial and error we found a display algorithm that showed a pretty good result:
Crazy-Lisa
The source for this image is this very low resolution Mona Lisa:
It was a very fun experiment, it is magic to see the Crazyflie going back and forth blinking for ~3 minutes, click on the camera and see the resulting picture. It is also a really nice way to observe the current state of the lighthouse positioning. The lines are spaced by about 3 cm and the Crazyflie is controlled using the PID controller. The controller do a decent job of keeping the Crazyflie in lines and the space seems a little bit ’tilted’.
As a side note, we will be exhibiting at the ICRA 2019 conference May 20-24, 2019 in Montreal, Canada. We will running demo of the LPS and Lighthouse (though I am not sure we can print long exposure picture, this is not so exciting to look in real-time :). We hope you would like to come and meet us there!
Last week we blogged about the early release version of the lighthouse deck and showed a nice push-around demo of the Crazyflies using the Vive controller. Now we wanted to push the system even further, by making a Lighthouse Painting!
We started by adding a LED-ring deck on the bottom of the CrazyFlie 2.1 with the lighthouse deck attached to the top. We were able to access the input of the track pad of the Vive controller and link it to a specific color / hue value. The LED ring can display any color possible in the RGB range, so in theory, you could paint in whatever color you like. For now, the brightness was fixed, but this could be easily added to the demo script as well.
To capture the light trace, we needed to make a long-exposure image, therefore, the flight arena need to stay completely dark. Luckily, this was easy to do for us since we do not have any windows in our new testing arena. Our camera is the Canon D5600 with a manually controlled shutter time setting selected (press to open the shutter and press again to close the shutter). The aperture setting was set at F-22. Nevertheless, this is very depended on the environment, so we had to do some trial-and-error in order to get this parameter right.
Aperture too wide… perfect!
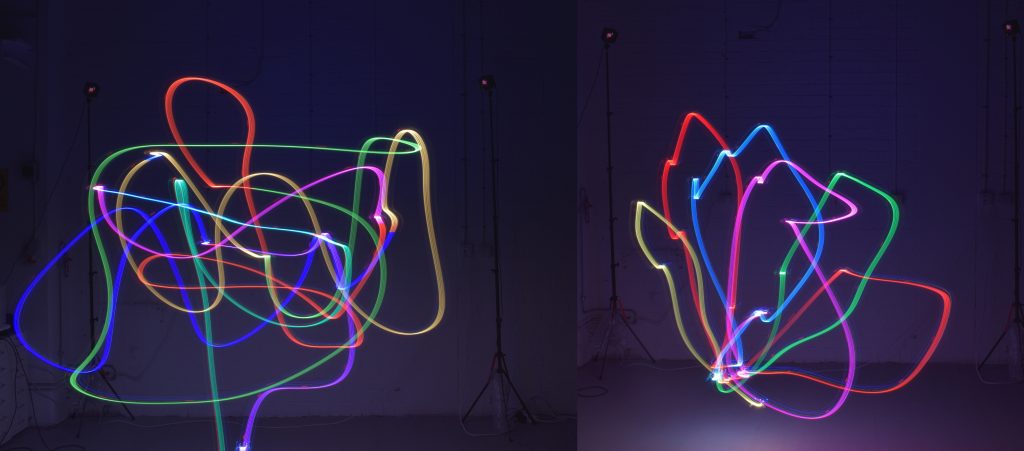
Once we had the set-up finished, we made several long exposure photo paintings with one person controlling the camera and another painting the picture into thin air. Of course, the artist would need to imagine its creation, as we were not able to see the result until after the picture was taken. Also, big gestures were required in order to complete the painting, as the Crazyflie’s and the Vive controller’s movements were synced 1:1, so adding some multiplication factor would come in handy. Nonetheless, the results were amazing.
Some nice examples of a single crazyflie flying based on the Vive’s position, changing color based on the trackpad
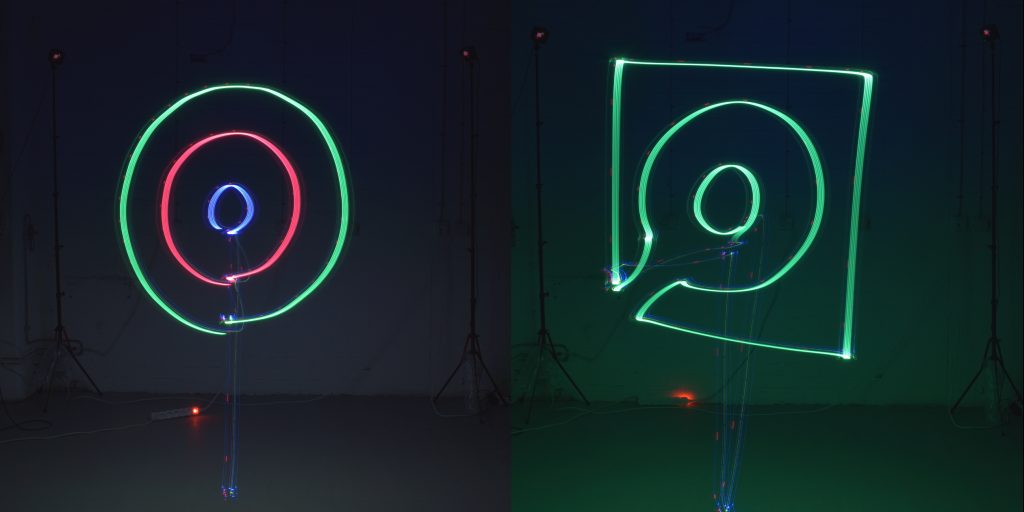
We took it even further, by making the Crazyflie fly a predefined trajectory and planned color scheme without the Vive controller. First, it flew three concentric circles in green, red and blue with the high level commander with the PID controller setting. But, the circles would probably be closed-off more properly with the Mellinger controller setting. We also were able to reproduce the Bitcraze logo in the same fashion. In both long-exposure photos, it still possible to see the Crazyflie, as it is still traceable due to its routine LED functionality, so you can easily observe where it took off, and where it flew in between shapes.
The Crazyflie flying a predefined trajectory in several shapes
The demo python scripts of the above flights can be found here:
An we also took a video of the Bitcraze logo being drawn. The mobile phone camera had some problems focusing in the dark, but it gives a good idea of how things works:
The lighthouse deck allows the Crazyflie to estimate its position using the HTC Vive tracking base-station normally used for Virtual Reality. The positioning is done by tracking the timing of rotating infra-red laser beams emitted from the base-stations. This system has the advantages of having a very good precision and of allowing the Crazyflie to acquire its position autonomously: once the Crazyflie knows the position and orientation of the base-station, it can calculate its own position without the help of any external systems.
The release as Early Access means that we have finished the hardware and we are confident that the hardware is working properly. Though we have not yet finished all the software and firmware, by releasing the hardware early we can get the hardware into the hands of users quickly to try it out. In return we hope we can get some help making the software better.
Current state
The Crazyflie can calculate its position from the received Vive Base-Station V1 signals.
Direct line of sight should be kept to both base-stations. The Lighthouse deck has 4 receivers so in the future it will be possible to get a position from seeing only one base station.
Base-Station V2 support is still being worked-on, it will only require a software update.
The Base-station position is hard-coded in the Crazyflie and found using SteamVR. Ideally this should be sent from the ground and the Crazyflie should calculate the positions of the Base-Stations automatically.
The previous point means that a full VR system or at least two base stations and a controller or tracker is required to setup the system. In the future we hope to setup the system with only a Crazyflie and two base stations.
Since this version of the deck only has horizontal sensors, it is important that the base-stations are placed above the flight space and the Crazyflies should fly ~40cm bellow the base-stations
As long as the deck is in early access, the main documentation will be the lighthouse positioning page in the wiki. This page is going to be updated a lot in the near future and will track the progress in development.
Demo
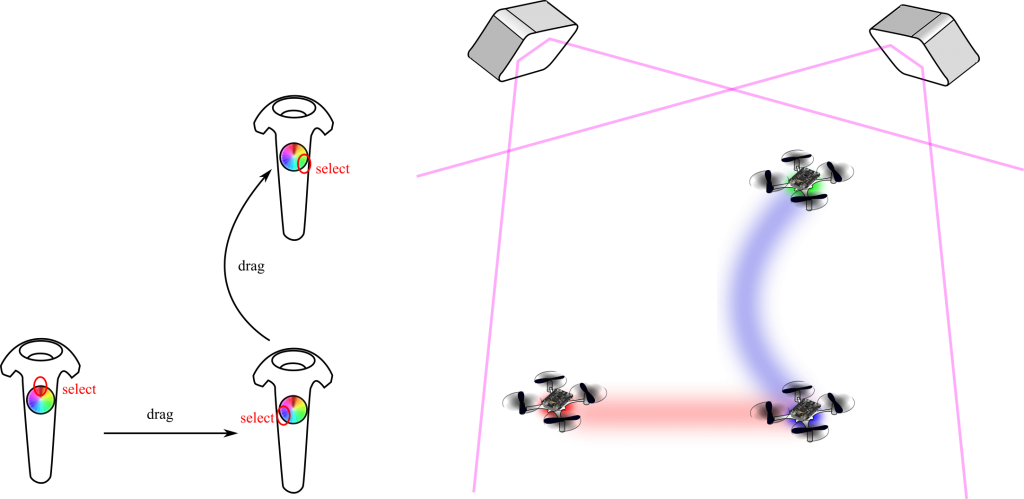
We have written a small demo script that allows to set the position of the Crazyflie using a Vive controller. It is a good demo to experiment with the precision of the system and the ability to mix VR and Crazyflie since they are in the same tracking space:
In this demo, a python script connects to two Crazyflies and acquire the controller position using OpenVR and makes the Crazyflies take-off above the controller. Then, when the controller trigger is pushed, the setpoint to the closest Crazyflie is changed to follow the controller movement, the Crazyflies are flying autonomously only getting position setpoints from the python script. The position estimation and control is handled onboard.
We are pretty excited by this release since we think this positioning technology will be very useful for a lot of use-case. Let us know what you think and do not hesitate to contribute if you want to improve the system :).
Last week was busy at Bitcraze as we moved to our new office. We packed all our tools, equipment, toys, components, stock and other bits and pieces into boxes and on Tuesday the moving truck came to pick it all up. Everything was very smooth and by lunch all the stuff had been unloaded in the new office.
Office work
Until now we have had our offices at various co-working spaces, but this time we rent a “real” office. We get a lot of more space that fits our needs better (a flight lab!) but the drawback is that we have to buy a lot of stuff that was part of the package earlier, such as furniture, printer, network, fire extinguishers, coffee brewer and lots of other things.
Painting Bitcraze green wall
We spent most of last week unpacking, buying stuff, painting and installing and we are in pretty good shape now. There are still a lot to do but the most important functionality is up and running. We even managed to ship orders in the store every day except Tuesday when we moved.
This week we have a guest blog post from Javier Burgués. Enjoy!
I would like to introduce you a rather unknown application of the CrazyFlie 2.0 (CF2): chemical sensing. Due to its small form-factor, the CF2 is an ideal platform for carrying out gas sensing missions in hazardous environments inaccessible to terrestrial robots and bigger drones. For example, searching for victims and hazardous gas leaks inside pockets that form within the wreckage of collapsed buildings in the aftermath of an earthquake or explosion.
To evaluate the suitability of the CF2 for these tasks, I developed a custom deck, named the MOX deck, to interface two metal oxide semiconductor (MOX) gas sensors to the CF2. Then, I performed experiments in a large indoor environment (160 m2) with a gas source placed in challenging positions for the drone, for example hidden in the ceiling of the room or inside a power outlet box. From the measurements collected in motion (i.e. without stopping) along a predefined 3D sweeping path that takes around 3 minutes, the CF2 builds a map of the gas distribution and identifies the most likely source location with high accuracy.
1. MOX deck
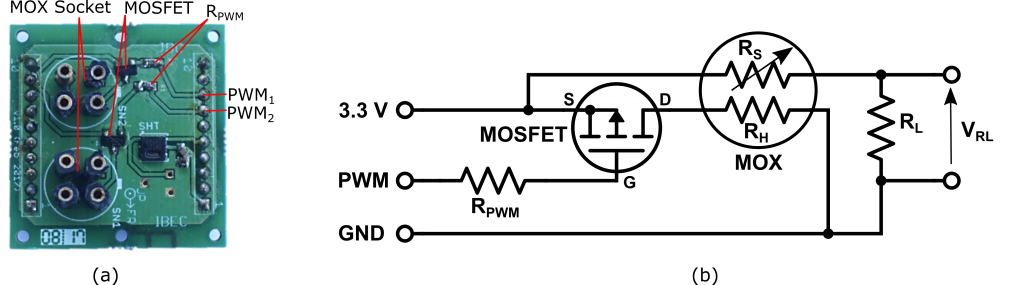
The MOX deck (Fig. 1a) contains two sockets for 4-pin Taguchi-type (TGS) gas sensors, a temperature/humidity sensor (SHT25, Sensirion AG), a dual-channel digital potentiometer (AD5242BRUZ1M, Analog Devices, and two MOSFET p-type transistors (NX2301P, NEXPERIA). I used TGS 8100 sensors (Figaro Engineering) due to its compatibility with 3.0 V logic, power consumption of only 15 mW (the lowest in the market as of June 2016) and miniaturized form factor (MEMS). Since the sensor heater uses 1.8V, two transistors (one per sensor) reduce the applied power by means of pulse width modulation (PWM). The MOX read-out circuit (Fig. 1b) is a voltage divider connected to the μC’s analog-to-digital converter (ADC). The voltage divider is powered at 3.0 V and the load resistor (RL) can be set dynamically by the potentiometer (from 60 Ω to 1 MΩ in steps of 3.9 kΩ). Dynamic configuration of the load resistor is important in MOX gas sensors due to the large dynamic range of the sensor resistance (several orders of magnitude) when exposed to different gas concentrations. The sensors were calibrated (by exposing them to several known concentrations) to convert the raw output into parts-per-million (ppm) concentration units.
Figure 1. (a) MOX deck (without gas sensors); (b) Schematic of the conditioning electronics for each MOX sensor.
The initialization task of the deck driver configures the PWM, initializes the SHT25 sensor, sets the wiper position of both channels of the potentiometer and adds the MOX readout registers to the list of variables that are continuously logged and transmitted to the base station. The main task of the deck driver reads the MOX sensor output voltage and the temperature/humidity values from the SHT25 and sends them to the ground station at 10 Hz.
2. Experimental Arena, External Localization System and Gas Source
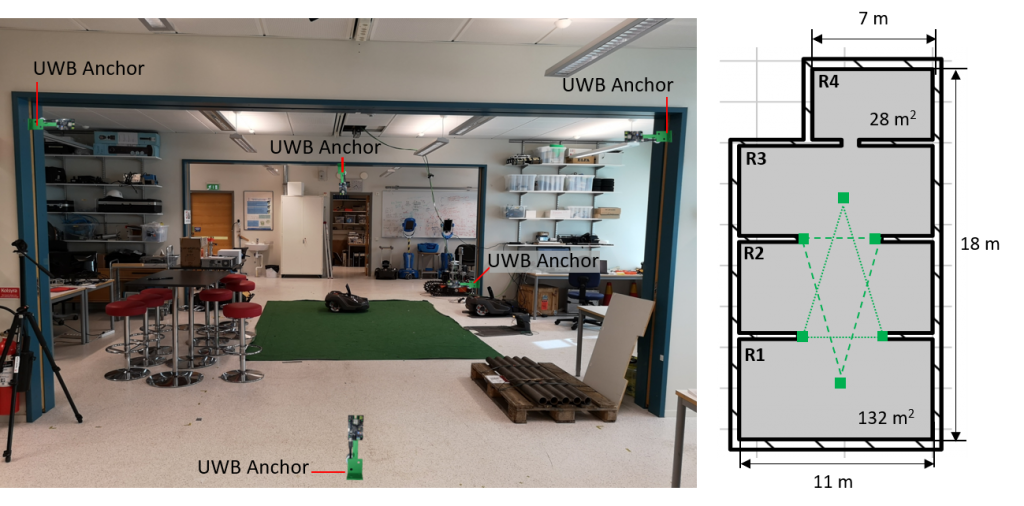
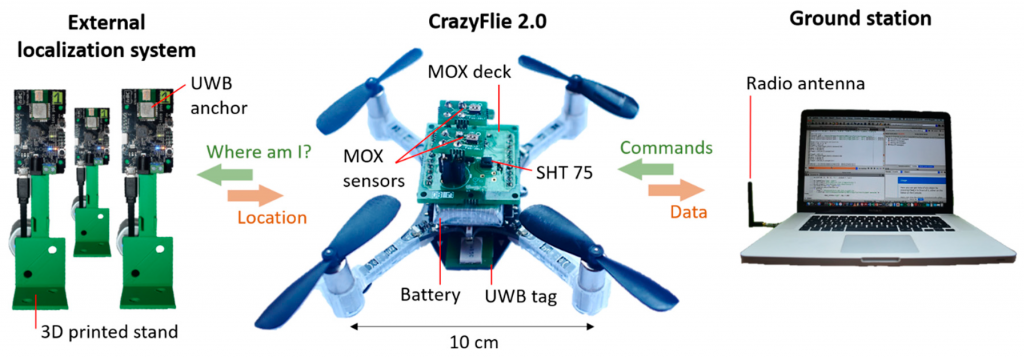
Experiments were performed in a large robotics laboratory (160 m2 × 2.7 m height) at Örebro University (Sweden). The laboratory is divided into three connected areas (R1–R3) of 132 m2 and a contiguous room (R4) of 28 m2 (Fig. 2). To obtain the 3D position of the drone, I used the Loco positioning system (LPS) from Bitcraze, based on ultra-wide band (UWB) radio transmitters. Six LPS anchors were positioned in known locations of the experimental arena and one LPS tag was fixed to the drone. The six LPS anchors were placed in the central area of the laboratory, shaped in two inverted triangles (below and above the flight area).
Figure 2. Experimental arena. The green squares indicate the position of the UWB anchors, which are positioned along two inverted triangles (green lines).
Figure 3. The CrazyFlie 2.0 equipped with the MOX deck and the UWB tag (center) gets its 3D position from the LPS system (left). The location and sensor data are communicated to the ground station (right) over the 2.4 GHz ISM band.
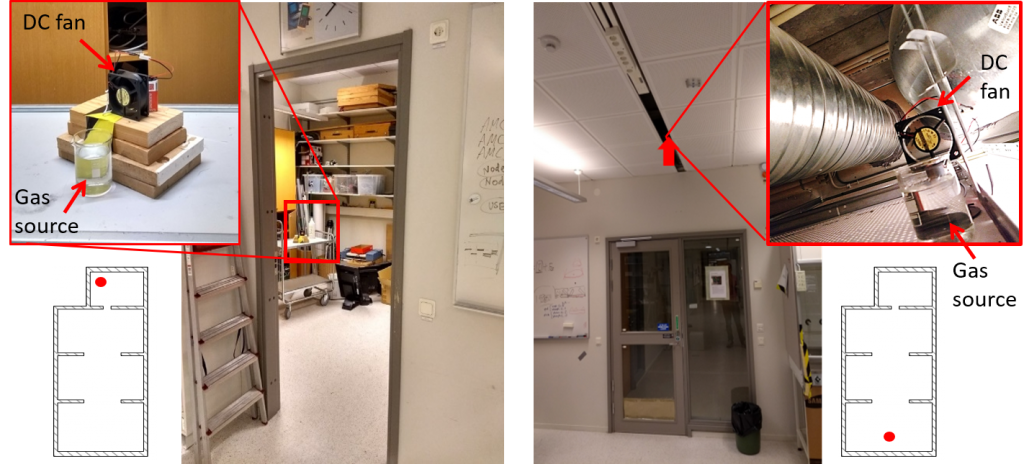
A gas leak was emulated by placing a small beaker filled with 200 mL of ethanol 96% in different locations of the arena (Fig. 4). Ethanol was used because it is non-toxic and easily detectable by MOX sensors. Two experiments were carried out to check the viability of the proposed system for gas source localization and mapping in complex environments. In the first experiment, the gas source was placed on top of a table (height = 1 m) in the small room (R4). In the second experiment, the source was placed inside the suspended ceiling (height = 2.7 m) near the entrance to the lab (R1). Since the piping system of the lab runs through the suspended ceiling, the gas source could represent a leak in one of the pipes. A 12 V DC fan (Model: AD0612HB-A70GL, ADDA Corp., Taiwan) was placed behind the beaker to facilitate dispersion of the chemicals in the environment, creating a plume. The experiments started five minutes after setting up the source and turning on the DC fan.
Figure 4. Gas source location in two experiments. (left) Experiment 1: inside small room; (right) Experiment 2: hidden in suspended ceiling.
3. Navigation strategy
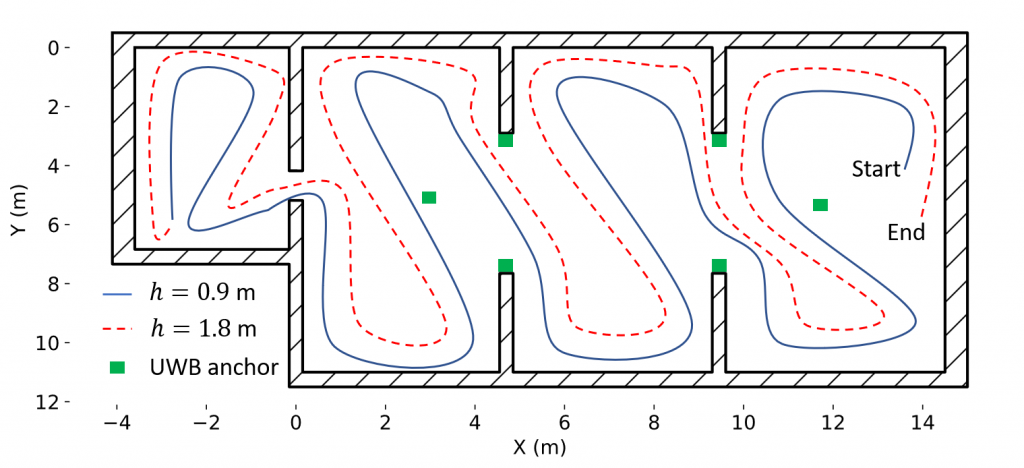
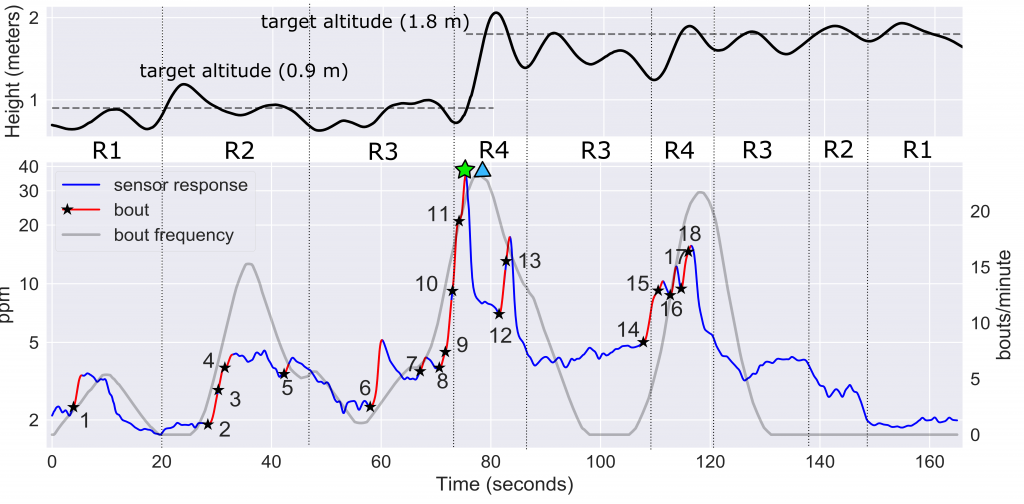
The drone was sent to fly along a predefined sweeping path consisting of two 2D rectangular sweepings at different heights (0.9 m and 1.8 m), collecting measurements in motion (Fig. 5). These two heights divide the vertical space of the lab in three parts of equal size. Flying first at a lower altitude minimizes the impact of the propellers’ downwash in the gas distribution. For safety reasons, the trajectory was designed to ensure enough clearance around obstacles and walls, and people working inside the laboratory were told to remain in their seats during the experiments. The ground station communicates the flight path to the drone as a sequence of (x,y,z) waypoints, with a target flight speed of 1.0 m/s. The CF2 reports the measured concentration and its location to the ground station every 100 ms.
Figure 5. Predefined navigation strategy based on zig-zag sweeping at two heights (0.9 and 1.8 m).
At the end of the exploration, the ground station uses all the received information to compute a 3D map of the instantaneous concentration and the ’bouts’. A ’bout’ is declared when the derivative of the sensor response exceeds a certain threshold. Bouts are produced by contact with individual gas patches and some authors use them instead of the instantaneous response (which is more affected by the slow response time of chemical sensors). For gas source localization, we compare two approaches: using the cell with maximum value in the concentration map or using the cell with maximum bout frequency. The bout frequency (bouts/min) is computed as the bout count in a 5 second sliding window multiplied by 12 (to convert it to bouts/min).
4. Results
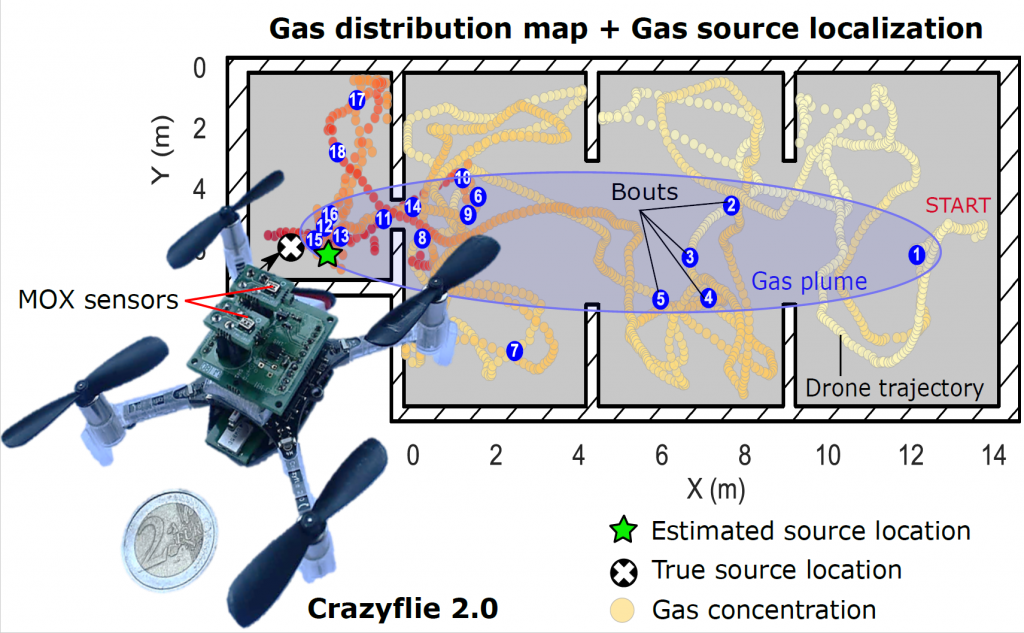
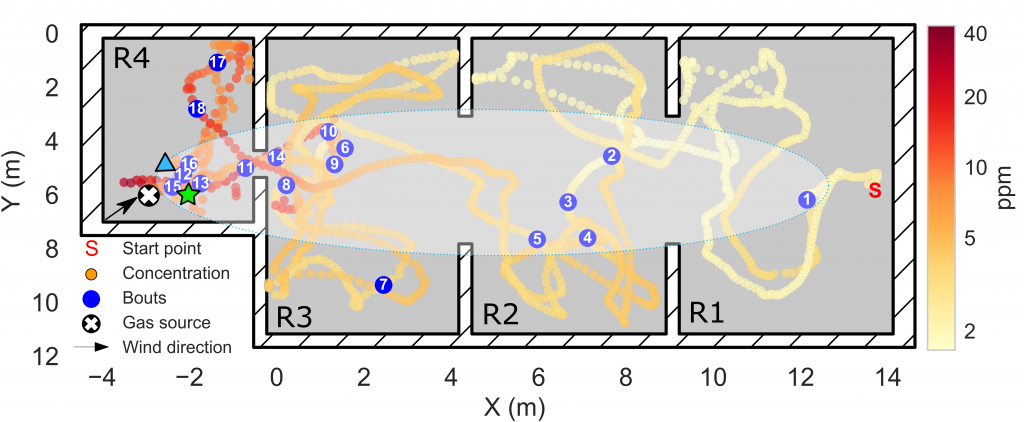
In the first experiment, the drone took off near the entrance of the lab (R1), 17 meters downwind of a gas source located in the other end of the laboratory (R4). From the gas distribution map (Fig. 6a) it is evident that the gas source must be in R4, because the maximum concentration (35 ppm) was found there while concentrations below 5 ppm were measured in the rest of the lab. The gas plume can be outlined from the location of odor hits. The highest odor hit density (25 hits/min) was found also in R4. The cells corresponding to the maximum concentration (green start) and maximum odor hit frequency (blue triangle) were found at 0.94 and 1.16 m of the true source location, respectively.
Figure 6a. 2D map of the instantaneous concentration (ppm) measured in Experiment 1 (in log scale). The odor hits are represented by blue circles. A hand-drawn ellipse outlines the approximate plume shape based on the location of odor hits.
Figure 6b. (top) Trajectory of the CF2 along the z-axis. (bottom) Temporal evolution of the measured concentration (ppm) on a log scale, with odor hits highlighted in red (the black star indicates the start of an odor hit). The identifiers R1–R4 indicate the area of the map in which the drone is flying at each moment. The maximum instantaneous concentration and the maximum odor hit frequency are indicated by a green star and a blue triangle, respectively.
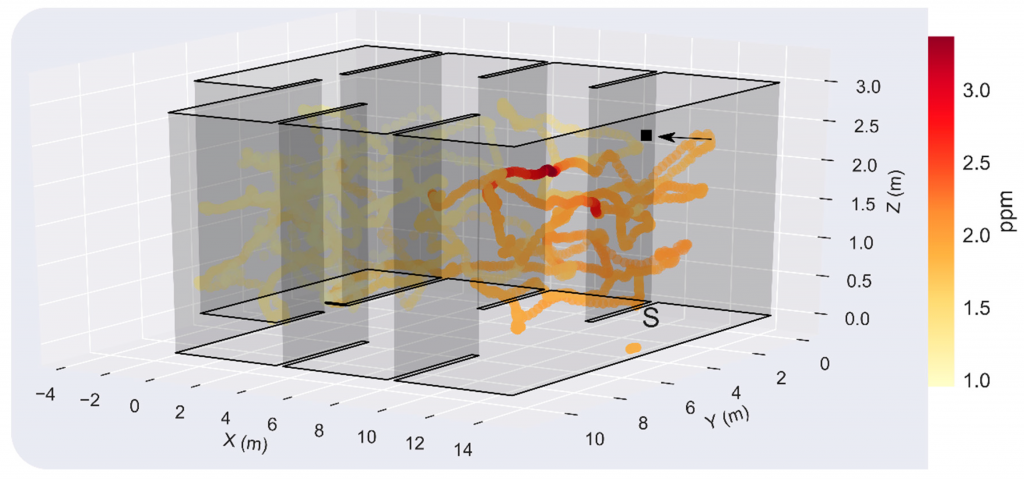
In the second experiment, the gas source was located just above the starting point of the exploration, hidden in the suspended ceiling (Fig. 7). The resulting maximum concentration in the test room was measured when the drone flew at h=1.8 m, highlighting the importance of sampling in 3D for localization and mapping of elevated gas sources. However, since the source is presumably not directly exposed to the environment, concentrations below 3 ppm were found in most locations of the room, which complicates the gas source localization task. The concentration and odor hit maps suggest that the gas source is located in the division between R1 and R2, which represents a localization error of 4.0 and 3.31 m, respectively.
Figure 7. 3D map of the instantaneous concentration (ppm) in Experiment 2. The black square indicates the gas source location (x,y,z) = (14.0, 5.2, 2.7) m, the black arrow the wind direction (positive x-axis) and the letter ‘S’ the starting point of the drone (x,y,z) = (13.5, 5.2, 0.0) m.
5. Conclusions
These results suggest that the CF2 can be used for gas source localization and mapping in large indoor environments. In contrast to previous works in which long measurement times were taken at predefined or adaptively chosen sampling locations, a rough approximation of such maps can be obtained in very short time with concentration measurements acquired in motion. The obtained gas distribution maps seem coherent with respect to the true source location and wind direction, and not only enable the detection of the source with relatively small localization errors but also provide a rich visual interpretation of the gas distribution.
If you are interested in more details about this work, take a look at the journal paper or drop me an email at <jburgues8 at gmail dot com> or leave a comment on the blog!
The Crazyflie 2.0 was released almost 4 years ago now. When we released it we wanted to avoid limiting our users in hardware. We over-designed it with lots of features and power we weren’t using at the time of release. We also put in the deck connector so we could keep users updated with new hardware without having to replace their Crazyflies.
Over the years there’s been thousands of users and lots of feedback on the product. Most of it great, but there’s of course also been issues that needed to be addressed. The original design concept is still working with new decks coming out and still free CPU cycles, flash and RAM. So instead of major updates we decided to focus on fixing the issues we’ve seen while keeping backwards compatibility for our users.
So today we’re really excited to announce we’ve released the Crazyflie 2.1! The updated version of the Crazyflie brings improved flight performance, better durability and improved radio stability.
Here’s a list of the updates:
Better radio performance and external antenna support: With a new radio power amplifier we’ve improved the link quality and added support for dual antennas (on-board chip antenna and external antenna via u.FL connector)
Better power button: We’ve gotten feedback that the power button breaks too easily, so now we’ve replaced with a more sturdy alternative.
Improved battery cable fastening: To avoid weakening of the cables over time they now run through a cable relief.
Improved sensors: To make the flight performance better we’ve upgrade the IMU and pressure sensor. The new Crazyflie uses the drone specialized sensor combo BMI088 and BMP388 by Bosch Sensortech. It lowers drift and avoids accelerometer saturation which makes the IMU more “trustable”.
It’s important to note that the Crazyflie 2.1 is a drop-in replacement for the Crazyflie 2.0. All spare parts and decks are compatible with both the Crazyflie 2.0 and the 2.1.
We even took it so far that the same binary can be flashed on the Crazyflie 2.0 and 2.1 without any special care. The binary will automatically activate the right drivers which means working with mixed groups of 2.0 and 2.1 isn’t a hassle.
When releasing the Crazyflie 2.1 we’ve also updated all the bundles to contain the new version. But even though you can’t get the bundles with the Crazyflie 2.0, there’s still some Crazyflie 2.0 units left from the last batch that can be purchased in the E-store.