We currently have our office at The Ground, a co-working space for startups. It has been three fantastic years at The Ground, with lots of awesome people around and we have had a great time, but space is limited and we are now moving on to our own office. We have found a great place where we will not only get more office space, we will also finally have our own dedicated flight lab!
The flight lab
We hope the flight lab will be a useful tool for future quad copters and positioning systems, and we think it will speed up the development process and help us create even better products.
We will move to the new office February 25, stay tuned for more information.
Björn is leaving Bitcraze
We are sad to announce that Björn is leaving the company. Björn has been involved in film making on his spare time and has now decided to explore this world full time. He has been a much valued colleague and he will be missed, but we are at the same time excited on behalf of him and hope for a bright film future!
While Crazyflie is nowaday mostly used connected to a computer, we have mobile clients that can be used to fly a Crazyflie using either Bluetooth Low Energy or a Crazyradio with an Android device or an iphone.
The Android client is currently the most advanced one with support for some decks. The goal of these mobile clients is to at least allow to fly a Crazyflie manually, though a lot more could be done by supporting the various decks of the Crazyflie (for example using the flow deck, one might imagine drawing a trajectory on the phone and having the Crazyflie following it :-).
As for development, we have not been very active in the development of the mobile clients and are relying mostly on contributions. So if you are interested into adding functionalities do not hesitate to drop by the Github page of the Android or iOS clients and to propose functionalities and pull requests.
Android client
In 2018, Fred the maintainer of the Android client, has worked hard to stabilize the current app and solve the last few bugs and problem in the current app. A new version was released last week that incorporate all the fixes.
Last years the Android client has seen big internal changes including separating all Crazyflie protocol handling in a separate java library. All these changes will make it easier to implement new functionality in the future and to make the functionality available to android as well as, to any Java program using the Crazyflie java lib.
Iphone client
The iPhone client has seen much less activity in 2018. It has been kept updated with the new versionsd of the Swift language and have seen some bugfixes, all thanks to Github contributors.
There have been reports of a couple of pretty bad bugs that have appeared in the latest release, as soon as these bugs are fixed we plan to release a new version of the iPhone client. The new version will also include the possibility to control the Crazyflie by tilting the phone, and with the bug fixes in place we should be off for a good start of 2019.
Windows client
The Windows UAP Crazyflie client is the least advance of all the mobile Clients. It has the particularity to work on Windows 10 for computers as well as for Phones. This makes it the only implementation of a Bluetooth low energy Crazyflie client for computers. However, Windows 10 for phones being pretty much dead now, the future of this client might be more on the Computer side if any.
Anyway, if anyone is interested in improving the Windows client, we will gladly test and merge pull requests when they come.
We are happy to announce that the Roadrunner soon will be available in our store. The Roadrunner is an Ultra Wide Band (UWB) tag that can be used to acquire the position of any robot or object in a Loco Positioning System, which makes the LPS work with more than the Crazyflie.
The Roadrunner
The Roadrunner started out as a joint project with a customer that wanted to track go-karts on a track, but we think it should be equally useful for tracking any robot or vehicle indoors. It is essentially a Crazyflie 2.1 with an integrated LPS deck, but stripped of all quadcopter stuff, all in a nice package. It can be interfaced through the Crazyradio and USB, but also through a UART if needed. It can be powered with anything between 4 – 17V. Since it is based on the Crazyflie 2.1 platform, all tools, libraries and clients are compatible. It also has the same expansion port which makes it compatible with existing decks and can be extended with custom hardware.
You might be curious about the name we choose? We usually name internal projects after birds and what could be a better name for tracking a car than the Roadrunner? We liked the name and decided to stick to it when releasing it as a product.
We release the Roadrunner as an Early access product since we are a bit uncertain of how it will be used. We hope to get feedback from anyone using it and improve the design if needed.
This is also the first product to be released based on our new platform concept. We will release a number of new hardware designs in the near future and the platform concept is intended to simplify managing and building firmware binaries for the different hardware configurations.
On a side note, Arnaud from Bitcraze and Fred, the maintainer of the Crazyflie android client, will be visiting FOSDEM 2019 in Brussels at the end of the month. If you want to meet us there just ping us in the comment, by mail, on twitter or on the forum.
The post this week is going to be a bit more about ‘how we work’. In our daily work we often have to solve problems that are not directly technical, though we tend to solve them in a technical way. Our new automated printing system is an example of that.
Last year we have started our own e-shop to be able to sell our products by ourselves. At first we used an external warehouse which ended up causing a lot of problem so we decided to have all stock for our e-shop in our office and started shipping from Sweden. Part of the plan was to make the shipping process as efficient as possible to understand what it takes to handle stock and shipping worldwide. The latest addition is an automated printing system.
When you order in the Bitcraze store, the order is sent to a system we made to handle stock and production. In the morning, one of us will log-in in this system and start handling the orders of the night. The system is generating all documents and ordering shipping for the order, this means that all we have to do is to print the picking list and all required documentation, put the products in a box and stick all the document on the box. This level of automation was already saving us a lot of time but we still had to print manually the right amount of every required document.
We now have a Raspberry-pi connected to all the printers. A program (written in Rust, because I want to experiment with the language :) connects the management system using WebSocket and waits for a print order. When we connect to the management system we just have to click ‘print’ on the next order to get all the required instructions and documents printed, ready to use.
We are still not sure we will keep shipping from the office in the long run, but making it as efficient as possible allows us to ensure good quality and high flexibility. This kind of project is also a good excuse to play with various technologies.
2018 has ended, we at Bitcraze are now back from a short holiday break and we are looking forward to 2019. There is already a lot of things rolling that will give results in 2019 and we wanted to do a short post about what we are currently planning.
Product wise, we still have a couple of product in final state of production that we will be releasing during Q1 or early Q2 2019, Crazyflie 2.1 production is on-going and we have started a first batch of the Lighthouse deck.
We have talked about both projects in previous post but if you want to see what the lighthouse positioning is capable of you can look at the Holiday video we pushed two weeks ago:
This video was made using two HTC Vive base station V1 and prototypes of the lighthouse deck we are currently producing. We intend this deck to be the first version of a series of Lighthouse receiver deck: we had to simplify the design by using only horizontal IR receivers in order to be able to produce a first batch now, this meant making some compromises on the usable flight space. We will talk more on that in a future block post but as you can see in the video the system is promising.
We will also try to travel a bit more this year to meet you. IROS 2018 was an awesome experience and allowed us to meet a lot of our users and to get a better understanding on how Crazyflie is and can be used. This year we are aiming at visiting Fosdem 2019 in Brussels as well as exhibiting at ICRA 2019 in Montreal and IROS 2019 in Macau. None of them are completely finalized yet so stay tuned on the blog for future announcement. If you have other suggestion of conferences or event you would like to see us attending, please tell us in the comments or drop us an mail.
Finally on a company side, we are looking at growing the team and changing office. We are currently 5 at Bitcraze which means that we have a lot to do and growing would allow us to expand the Crazyflie ecosystem with more functionality and cool stuff. We are also going to move to a new office where we will have a dedicated flight lab. Until now we have had our office in a co-working space and we used about 4x4m of our office space as a flight lab. In the new office we will have a dedicated 100m² flight space which will allow us to work more on swarm support and to improve the LPS system in a bigger space.
Another hectic year has passed. We can’t believe it’s been seven years since our first blog post. Only missing a few Monday blog posts over these past seven years makes this post #375! Kind of impressing from a bunch of nerds that rather write code instead of communicative and fun blog posts :-).
As being the last blog post of the year we can’t think of anything better then summarizing 2018.
In the beginning of the year the Digital artist Ben Kuperberg wrote about working with the intersection between juggling and technology and how he had been working with the Crazyflie in he’s performance. Later when visiting us during the summer he elaborated a bit more about LaMoucheFolle the open-source software he has develop to connect, monitor and control multiple drones.
Our community member Fred, the maintainer of the Android Crazyflie client and Java Crazyflie lib posted about the status of the Android client.
The community is one of the big motivators for us. We are very, very thankful for your support! You keep us going!
Software
On the Loco positioning side there has been a lot of focus on TDoA, aka swarm positioning. During the year we managed to release TDoA2 and TDoA3 as experimental. Read more about the algorithms in their respective blog post.
The Crazyswarm fork was merged into master, thanks again USC ACT Lab!
Together with Qualisys we continued the work to add support for their MoCap cameras to the Crazyflie system.
It might not be correctly classified as software but we released a new front page!
The Multiranger and the STEM ranging bundle was released! The Multiranger deck gives lots of exciting new possibilities when it comes to navigation and classroom activities. Se it in action here.
We released the Swarm bundle. A great package to get started with Crazyflie swarms.
Logistics
We can’t summarize 2018 without a note about the logistics problems we had which made us move the stock to our office in Malmö. Who figured it could be that hard! For those that had to wait a long time for their packages, we apologize. The good news is that it is much better now and logistics will work flawlessly in 2019!, hopefully… :-)
In the Happy holidays video this year we are using the upcoming Lighthouse deck for positioning, the plan is that the Lighthouse deck will be available in our store the first quarter next year.
The STEM ranging bundle is a great addition in the classroom for a wide range of students. By combining the Flow deck v2’s time-of-flight distance sensor and optical flow sensor with the Multi-ranger deck’s ability to measure distance to objects, the Crazyflie gets position and spatial awareness.
We have shot a video that shows the bundle in action!
multiranger_push.py: When the application in launched the Crazyflie will take off and hover. If anything is getting close to the right/left/front/back sensors the Crazyflie will move in the opposite direction.
multiranger_pointcloud.py: When the application is launched the Crazyflie will take off, hover and a 3D-plot will be shown of what is detected by the Multi-ranger deck sensors. By default the left/right/front/back/up sensors will be plotted, but you can also add the Crazyflie position and the down sensor if you like. The Crazyflie can be moved around by using the arrow keys on the keyboard and w/s for up/down and a/d for rotating CCW/CW. For more info see the documentation in the example.
We love feedback so please leave some comments in the field below!
Even though we are getting closer to Christmas and hopefully some well deserved rest, there are lots of things going on at Bitcraze. This week we have collected news about various topics that we wanted to share with you.
China
Tobias and Marcus visited our Chinese manufacturer Seeed last week in Shenzen. We are trying to visit Seeed at least once a year to meet in person rather than only via the internet.
huaqiangbei
It is always a great experience to visit Shenzen and it seems as things are moving at blazing speed over there, with amazing changes from year to year. Such as that you can now paying with face recognition in the grocery store and park you car in automatic parking garages.
Lighthouse deck
We are making progress on the Lighthouse front and we have a preliminary hardware design for the first version of the deck. There are still a lot of things to be done but we hope we will be able to order the first batch soon and that it will be available in our store the first quarter next year.
Qi charger V1.2 deck
The Qi charger deck is compatible with the Qi V1 standard. Recently we have been testing the deck with a new off-the-shelf charger and discovered that the deck was not working with the new charger. After investigating we discovered that the Qi deck is not compatible with the new Qi V1.2 chargers. We started a redesign of the board and we have now started to produce a batch of Qi deck V1.2 that is compatible with Qi 1.2 chargers. The new Qi deck will be released early January.
Roadrunner
The Roadrunner is our first stand alone Tag for the Loco Positioning System. It is in essence a Crazyflie with an integrated LPS deck but without motors and a different form factor, it was initially developed for an external project to track go-karts on a racing track. The Roadrunner can be fitted to anything that you want to track in a Loco Positioning System, a ground robot for instance. Since it is based on the Crazyflie, all the libraries and tools that are available in the Bitcraze eco-system are compatible. We plan to start selling the Roadrunner in our store in the beginning of next year.
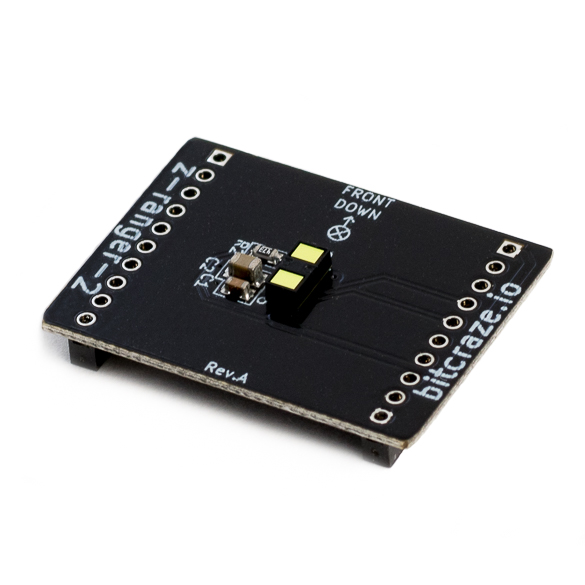
The Crazyflie Z-ranger and Flow decks share one sensor: the VL53 ranging sensor that provides mm-precision by measuring the time of flight of laser pulses. The manufacturer of this sensor has released an improved version, the VL53L1x that works for longer distances compare to the old one. The old sensor worked for distances up to 1 meter while the new one works up to 2 meters.
The Z-ranger deck interfaces a VL53 sensor facing downwards underneath the Crazyflie, it allows to implement very precise altitude-hold by using the ranging to the floor as absolute height.
The Flow deck has both a down-facing VL53 for height measurements as well as an optical flow sensor for position measurements that allows the Crazyflie to hold its height and fly at constant velocity.
We have released both the Z-ranger V2 and Flow V2 which allows to achieve accurate altitude hold and position hold at much higher heights. With the Flow V2 and Z-ranger V2 it is possible to fly almost all the way up to the ceiling in an ordinary room!