We are happy to announce the latest updates to the Crazyflie client and Python library. Major changes include improved persistent parameter management, enhanced plotting with new x-axis manipulation features, and new default logging configurations (for PID tuning). Minor updates include bug fixes and documentation improvements.
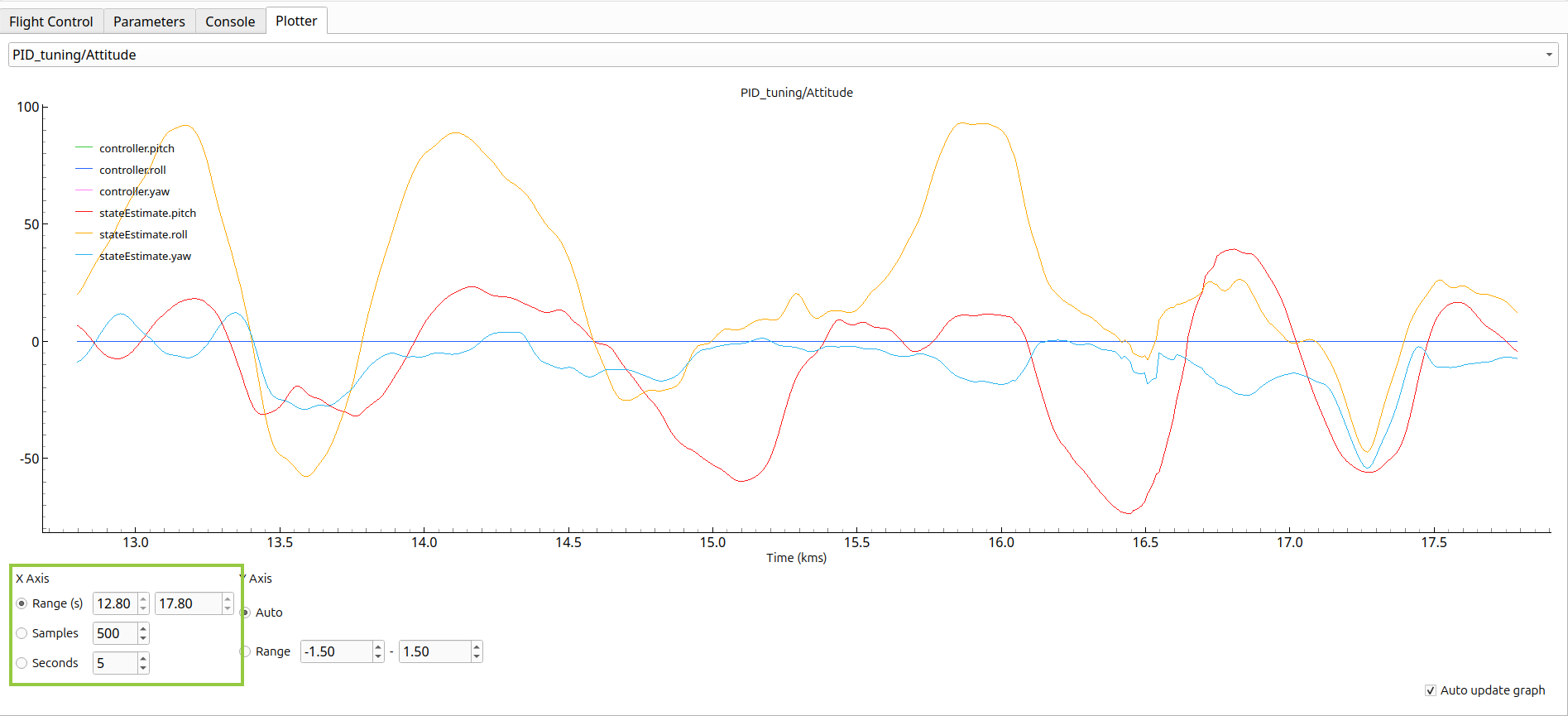
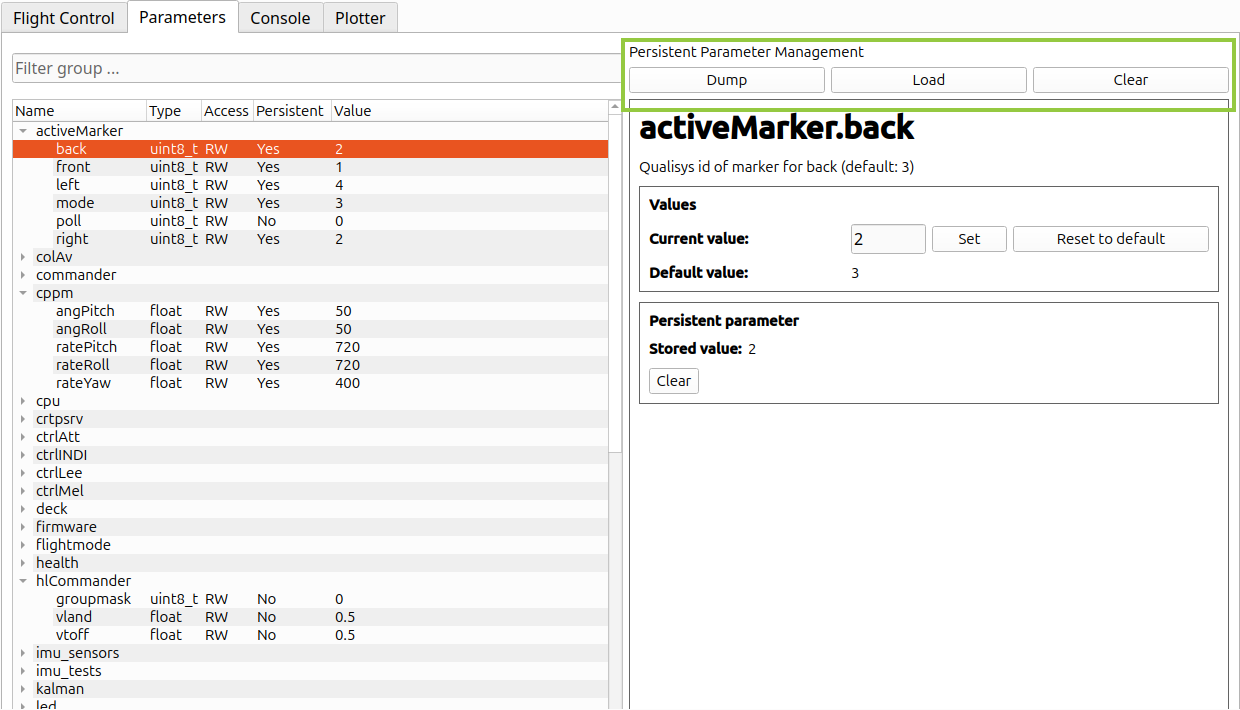
Updated plotter tab. Besides the existing option for a number of samples, users can now set x-axis limits to a number of seconds or a time range.Updated parameters tab. Users can now mass dump/load persistent parameters to/from a file, or clear all stored persistent parameters.
Whenever we show the Crazyflie at our booth at various robotics conferences (like the recent ICRA Yokohama), we sometimes get comments like ‘ahh that’s cute’ or ‘that’s a fun toy!’. Those who have been working with it for their research know differently, but it seems that the general robotics crowd needs a little bit more… convincing! Disregarding its size, the Crazyflie is a great tool that enables users to do many awesome things in various areas of robotics, such as swarm robotics and autonomy, for both research and education.
We will be showing that off by giving a live tutorial and demonstration at the Robotics Developer Day 2024, which is organized by The Construct and will take place this Friday, 5th of July. We have a discount code for you to use if you want to get a ticket; scroll down for details. The code can be used until 12 am midnight (CEST) on the 2nd of July.
The Construct and Robotics Developer Day 2024
So a bit of background information: The Construct is an online platform that offers various courses and curriculums to teach robotics and ROS to their users. Along with that, they also organize all kinds of live training sessions and events like the Robotics Developer Day and the ROS Awards. Unfortunately, the deadline for voting in the latter has passed, but hopefully in the future, the Crazyflie might get an award of its own!
What stands out about the platform is its implementation of web-based virtual machines, called ‘ROSJects,’ where ROS and everything needed for it is already set up from the start. Anyone who has worked with ROS(2) before knows that it can be a pain to switch between different versions of ROS and Gazebo, so this feature allows users to keep those projects separate. For the ROS Developer Day, there will be about five live skill-learning sessions where a ROSject is already preconfigured and set up for the attendees, enabling them to try the tutorial simultaneously as the teacher or speaker explains the framework.
Skill learning session with the Crazyflie
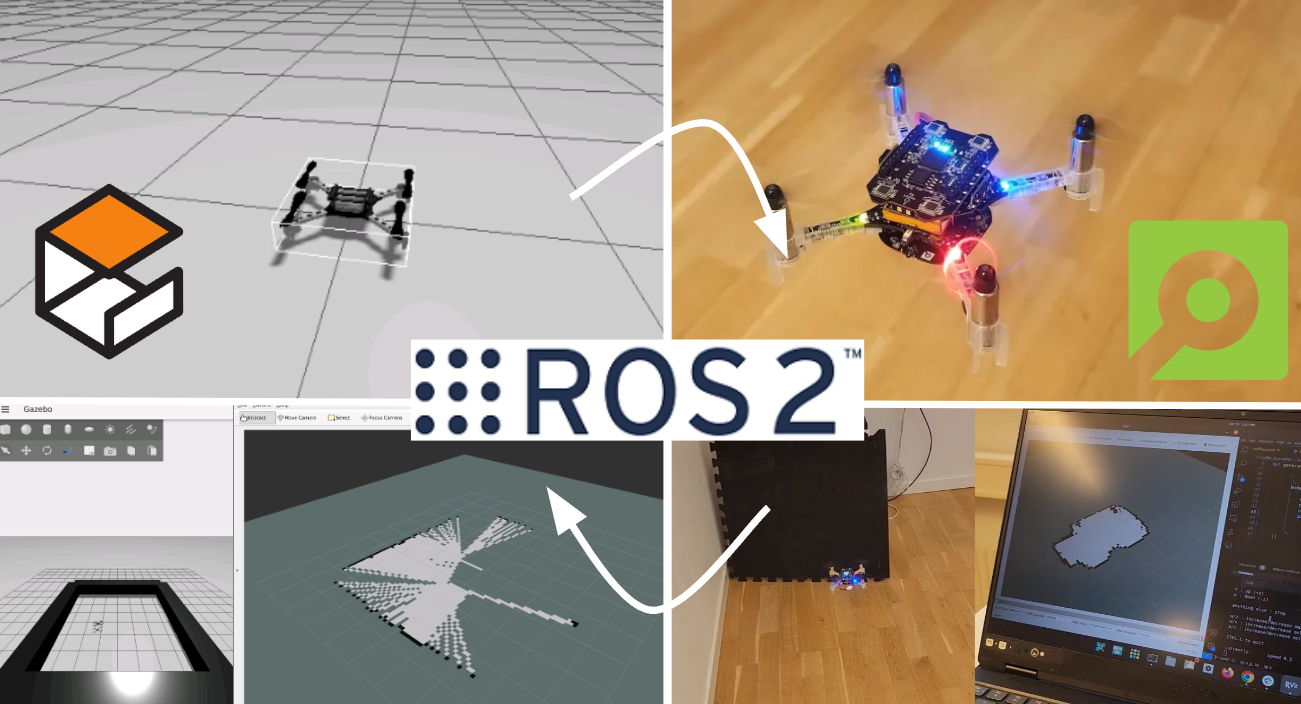
One of the earlier mentioned skill learning sessions is, of course, one with the Crazyflie! The title is “ROS 2 with a Tiny Quadcopter,” and it is currently planned to be the first skill learning session of the event, scheduled at 15:15 (3:15 pm) CEST. The talk will emphasize the use of simulation in the development process with aerial robotics and iterating between the real platform and the simulated one. We will demonstrate this with a Crazyflie 2.1 equipped with a Lighthouse deck and a Multi-ranger deck. Moreover, it will also use a Qi-charging deck on a charging platform while it patiently waits for its turn :D
What we will be showing is a simple implementation of a mapping algorithm made specifically for the Crazyflie’s Multiranger deck, which we have demonstrated before at ROSCon Kyoto and in the Crazyswarm2 tutorials. What is especially different this time is that we are using Gazebo for the simulation parts, which required some skill learning on our side as we have been used to Webots over the last couple of years (see our tutorial for that). You can find the files for the simulation part in this repository, but we do advise you to follow the session first.
You can, if you want, follow along with the tutorial using a Crazyflie yourself. If you have a Crazyflie, Crazyradio, and a positioning deck (preferably Lighthouse positioning, but a Flowdeck would work as well), you can try out the real-platform part of this tutorial. You will need to install Crazyswarm2 on a separate Ubuntu machine and add a robot in your ROSject as preparation. However, this is entirely optional, and it might distract you from the cool demos we are planning to show, so perhaps you can try this as a recap after the actual skill learning session ;).
Here is a teaser of what the final stage of the tutorial will look like:
Win a lighthouse explorer bundle and a Hands-On Pass discount
We are also sponsors of the event and have agreed with The Construct to award one of the participants a Crazyflie if they win any contest. Specifically, we will be awarding a Lighthouse Explorer bundle, with a Qi deck and a custom-made charging pad similar to the ones we show at fairs like ICRA this year. So make sure to participate in the contests during the day for a chance to win this or any of the other prizes they have!
It is possible to follow the event for free, but if you’d like to participate with the ROSjects, you’ll need to get a hands-on pass. If you haven’t yet gotten a hands-on ticket for the Robotics Developer Day, please use our 50% off discount code:
On a side note, we will be at the Robotics: Science and Systems Conference in Delft from July 15th to 19th, 2024—just about two weeks from now. We won’t have a booth as we usually do, but we will be co-organizing a half-day workshop titled Aerial Swarm Tools and Applications (more details on this website).
We will be organizing this workshop together with our collaborators at Crazyswarm2, as well as the developers of CrazyChoir and Aerostack2. We’re excited to showcase demos of these frameworks with a bunch of actual Crazyflies during the workshop, if the demo gods are on our side :D. We will also have great speakers, including: SiQi Zhou (TU Munich), Martin Saska (Czech Technical University), Sabine Hauert (University of Bristol), and Gábor Vásárhelyi (Collmot/Eötvös University).
As researchers passionate about UAV technology, we are excited to share our recent findings on how structural defects affect the performance of nano-quadcopters. Our study, titled “CrazyPAD: A Dataset for Assessing the Impact of Structural Defects on Nano-Quadcopter Performance,” offers comprehensive insights that could greatly benefit the Crazyflie community and the broader UAV industry.
The Motivation Behind Our Research
Understanding the nuances of how structural defects impact UAV performance is crucial for advancing the design, testing, and maintenance of these devices. Even minor imperfections can lead to significant changes in flight behavior, affecting stability, power consumption, and control responsiveness. Our goal was to create a robust dataset (CrazyPAD) that documents these effects and can be used for further research and development.
Key Findings from Our Study
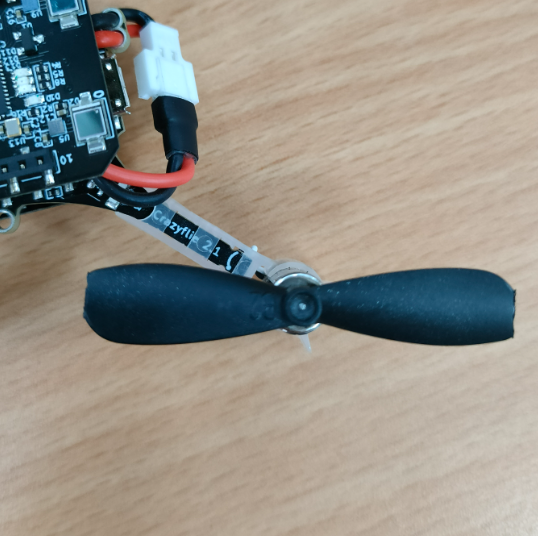
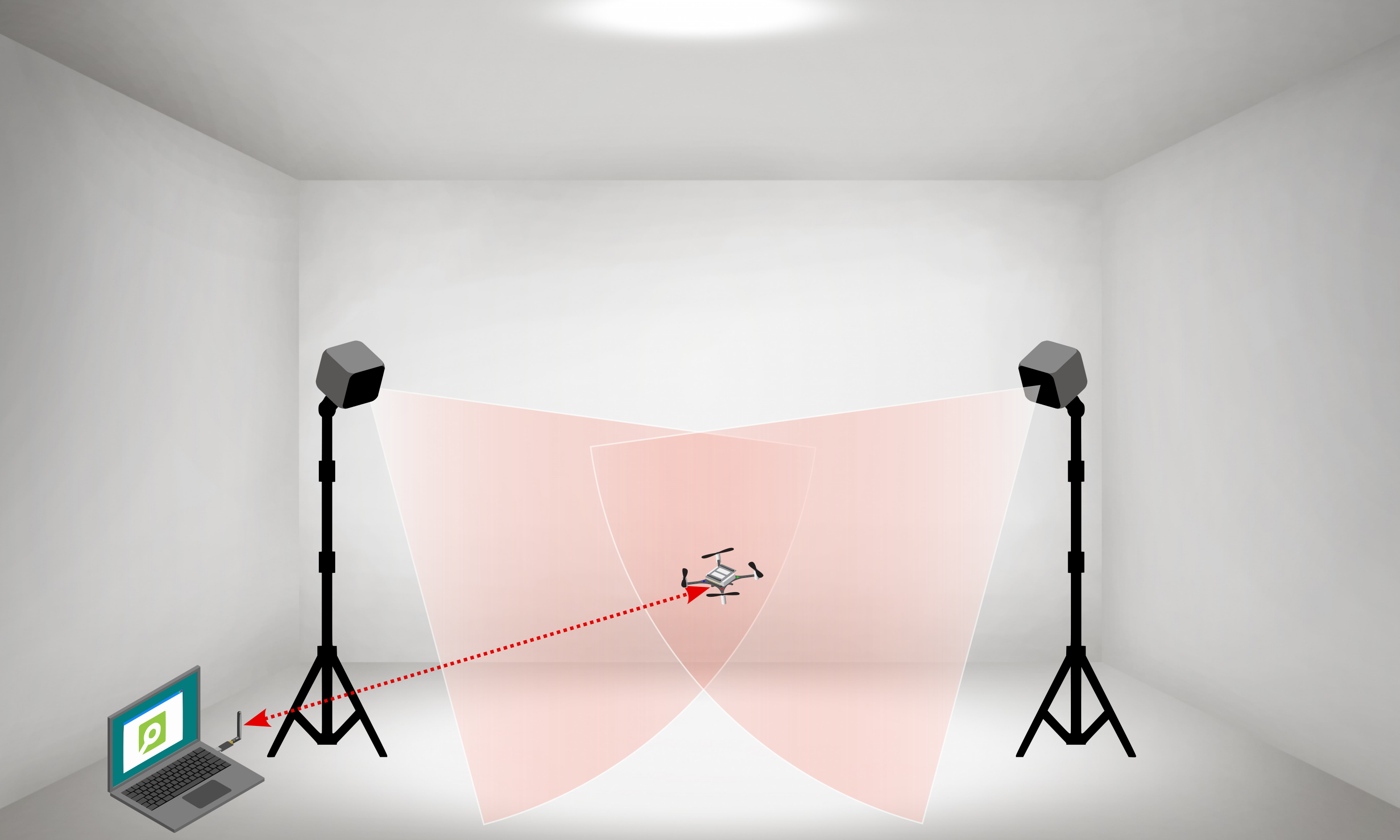
We conducted a series of experiments by introducing various defects, such as added weights and propeller cuts (Figure 1), to nano-quadcopters. For the experiments, we used the Lighthouse Positioning System with two SteamVR 2.0 virtual reality stations (Figure 2).
Figure 1. Propeller with two side defects
Figure 2. Schematic of the experimental setup with Lighthouse Positioning System
Here are some of the pivotal findings from our research:
Stability Impact: We observed that both added weights and propeller cuts lead to noticeable changes in the stability of the quadcopter. Larger defects caused greater instability, emphasizing the importance of precise manufacturing and regular maintenance.
Increased Power Consumption: Our experiments showed that structural defects result in higher power consumption. This insight is vital for optimizing battery life and enhancing energy efficiency during flights.
Variable Control Responsiveness: We used the standard deviation of thrust commands as a measure of control responsiveness. The results indicated that defects increased the variability of control inputs, which could affect maneuverability and flight precision.
Changes in Roll and Pitch Rates: The study also highlighted variations in roll and pitch rates due to structural defects, providing a deeper understanding of how these imperfections impact flight dynamics.
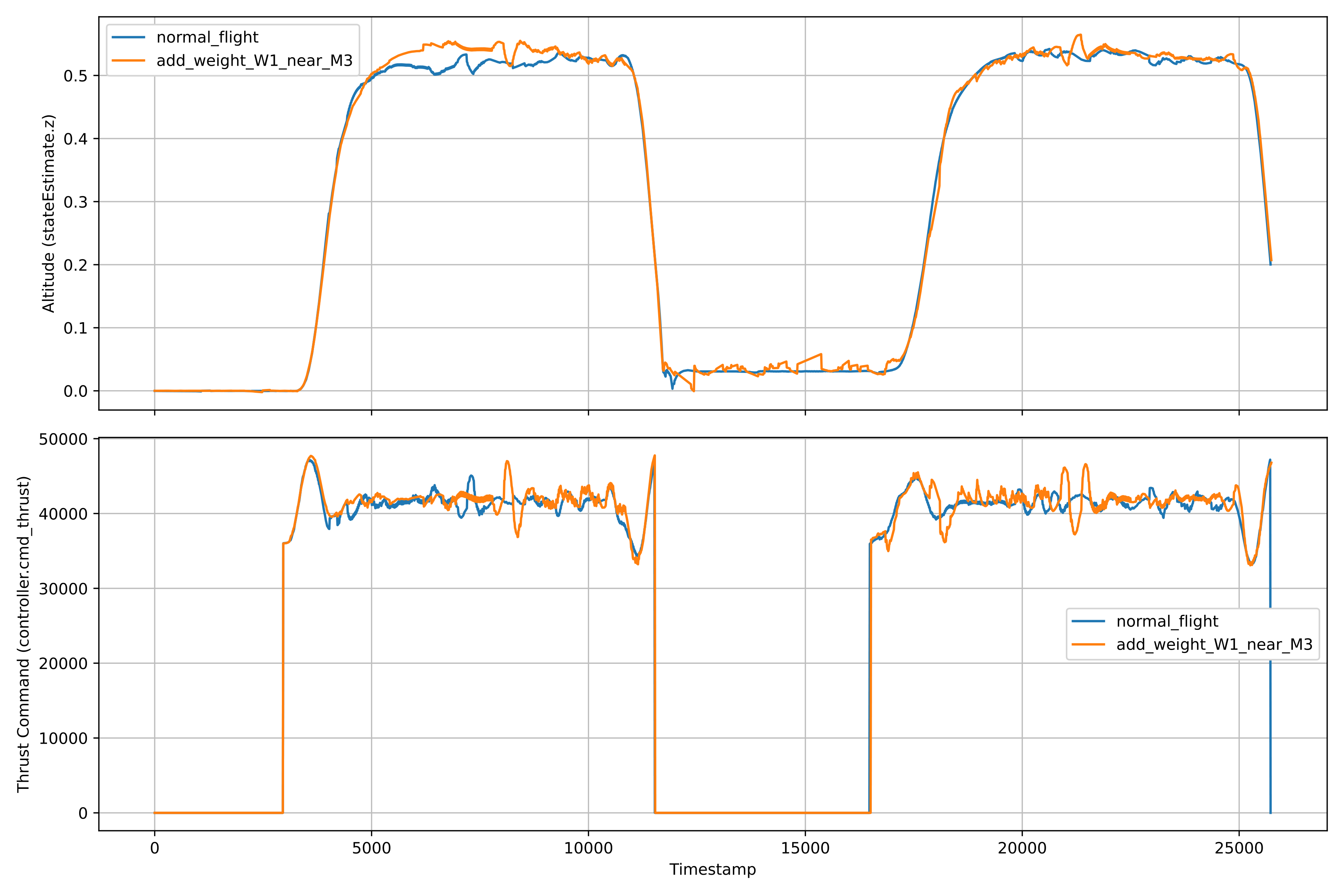
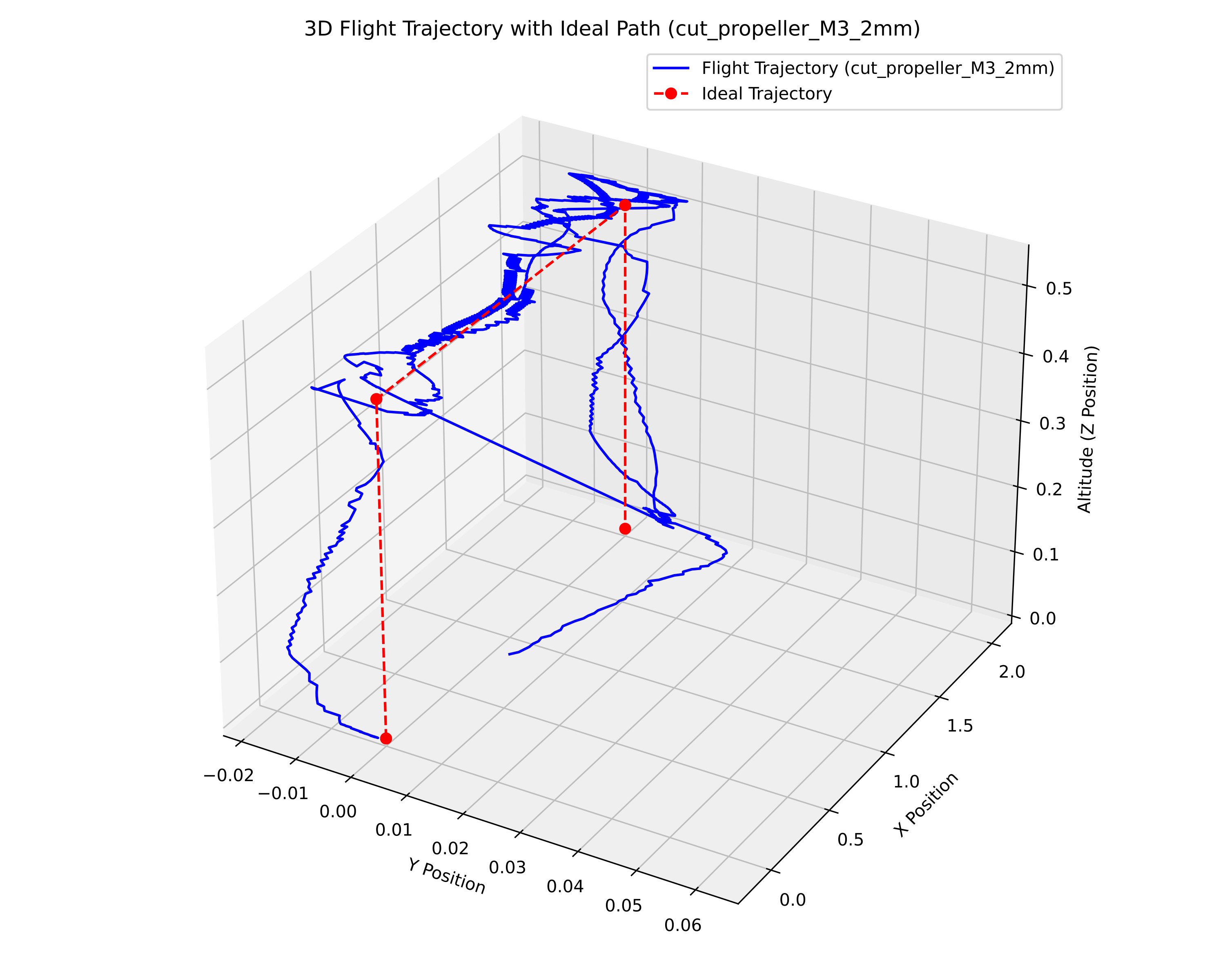
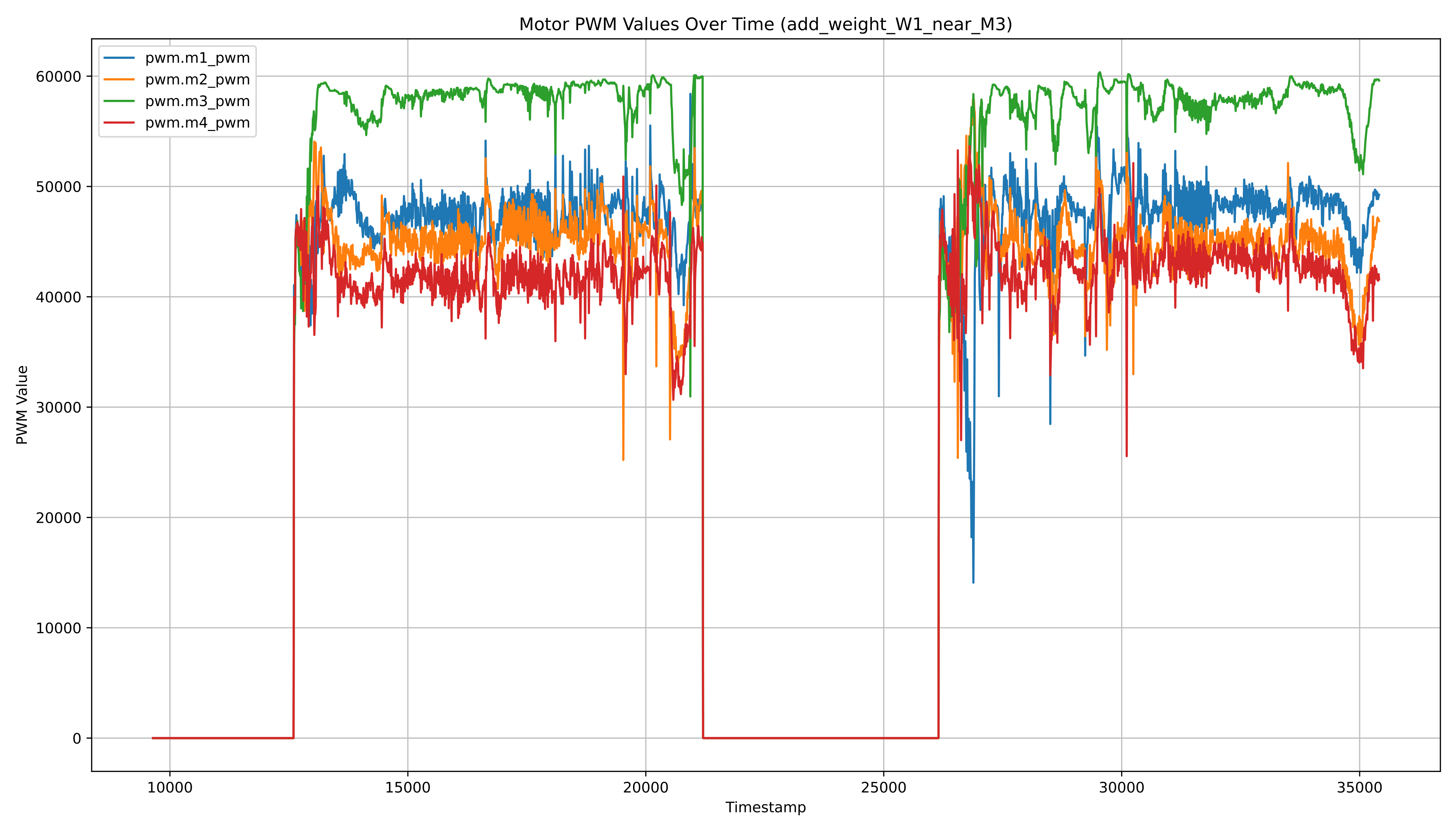
We show Figure 3 as an example of a graph obtained from our dataset. In this figure, you can see the altitude and thrust command over time for different flight conditions. The blue line represents the normal flight, while the orange line represents the flight with additional weight near the M3 propeller. In Figure 4, you can see the 3D flight trajectory of the Crazyflie 2.1 quadcopter under the cut_propeller_M3_2mm condition with the corrected ideal path. The blue line represents the actual flight trajectory, while the red dashed line with markers represents the ideal trajectory. Figure 5 shows the Motor PWM values over time for the add_weight_W1_near_M3 condition. The plot shows the PWM values of each motor (M1, M2, M3, and M4) as they respond to the added weight near the M3 propeller.
More examples of graphs obtained from the CrazyPAD dataset can be found in our research paper specifically describing this dataset: https://doi.org/10.3390/data9060079
Figure 3. Altitude and thrust command over time for different flight conditions
Figure 4. 3D flight trajectory of the Crazyflie 2.1
Figure 5. Motor PWM values over time
Leveraging Research for Diagnostic and Predictive Models
One of the most exciting aspects of our research is its potential application in developing diagnostic and predictive models. The CrazyPAD dataset can be utilized to train machine learning algorithms that detect and predict structural defects in real-time. By analyzing flight data, these models can identify early signs of wear and tear, allowing for proactive maintenance and reducing the risk of in-flight failures.
Diagnostic models can continuously monitor the performance of a UAV, identifying anomalies and pinpointing potential defects. This real-time monitoring can significantly enhance the reliability and safety of UAV operations.
Predictive models can forecast future defects based on historical flight data. By anticipating when and where defects are likely to occur, these models can inform maintenance schedules, ensuring UAVs are serviced before issues become critical.
Why This Matters for the Crazyflie Community
The CrazyPAD dataset and our findings offer valuable resources for the Crazyflie community. By understanding how different defects affect flight performance, developers and enthusiasts can improve design protocols, enhance testing procedures, and ensure higher safety and performance standards for their UAVs.
We believe that sharing our research with the Crazyflie community can lead to significant advancements in UAV technology. The dataset we created is open under the MIT License for further exploration and can serve as a foundation for new innovations and improvements.
Get Involved and Explore Further
We invite community members to explore our full research article and the CrazyPAD dataset. Together, we can drive forward the standards of UAV technology, ensuring that Crazyflie remains at the forefront of innovation and excellence.
Our research paper with a detailed description of this dataset:
Masalimov, K.; Muslimov, T.; Kozlov, E.; Munasypov, R.CrazyPAD: A Dataset for Assessing the Impact of Structural Defects on Nano-Quadcopter Performance. Data 2024, 9, 79. https://doi.org/10.3390/data9060079
We are eager to collaborate with the Crazyflie community and welcome any feedback or questions regarding our research. Let’s work together to push the boundaries of what’s possible in UAV technology.
If you know a little about Sweden, you know about Midsommar. Nothing like the 2019 horror film (thankfully), though we do wear flower crowns and dance around the pole. It’s usually an occasion to celebrate with family (and alcohol) those long days and short nights. We actually celebrated a little bit early today with a nice team barbecue.
Midsommar is next Friday, and it marks the official kickoff to summer here in Sweden. That also means that for the coming 2 months, Bitcraze will be operating with a slightly smaller team. So, what does that mean for you? This should not impact you too much, of course, but here are the most important things to note:
Developer Meetings: First up, our regular developer meetings will be on hiatus during July and August. It’s a great time for everyone, including you, our regular attendees, to take a breather. We’ll be back in action come September, resuming our usual schedule of one meeting per month.
GitHub: With fewer team members around, our response time on GitHub discussions might be a bit slower. We strive to answer every question, but with less manpower, some issues might only get resolved when the person with the right expertise returns from their vacation. We appreciate your patience and understanding during this time.
Orders: Shipping and deliveries should have the same pace, so don’t worry about your order coming on time, we’ve got that covered!
Ongoing projects and maintenance
Our focus during the summer will shift primarily to maintenance and continuing work on ongoing projects. We’re putting the final touches on the Brushless project of course, and will keep working on its charger solution too.
We’re excited to announce our participation in Robotics Developers Day on July 5th. We’re not only sponsors of this event, we’re also thrilled that Kimberly will be hosting a live learning session about ROS 2 on the Crazyflie.
For us at Bitcraze, summer is a wonderful opportunity to slow down a bit and focus on projects we don’t usually have time for. This could mean diving deeper into learning RUST, reorganizing the office, or trying some prototypes out. It’s a chance to reset and prepare for the busy months ahead.
We hope you have a fantastic summer filled with sunshine, relaxation, and lots of new adventures. Glad Midsommar, as we say here!
As we mentioned earlier, ICRA Yokohama was full of exciting encounters – we really enjoyed meeting researchers, tech companies, and enthusiastic roboticists during those 4 days.
One challenge was to bring back as many research posters featuring the Crazyflies as possible. The goal was to decorate the walls of the office with them, as a “hall of fame”. And I’m really, really proud to show you how it turned up!
This was beforeAnd this is now!
In total, we received 6 new posters. Here they are:
This paper presents a strategy for optimizing the collaborative transportation of payloads in an under-capacitated vehicle routing scenario. The Crazyflies work together to dynamically adjust routes based on real-time data and transport capacities, and collaborate to lift and transport heavier payloads.
The paper describes a method for enabling a swarm of Crazyflies to dynamically seek and locate a moving target or source in constrained, GNSS-denied environments. Using a simple rule-based approach, the drones track dynamic source gradients and navigate obstacles autonomously with fully onboard systems.
The paper presents TinyMPC, a high-speed model-predictive control (MPC) solver designed for resource-constrained microcontrollers on small robots like the Crazyflie. TinyMPC efficiently handles real-time trajectory tracking and dynamic obstacle avoidance, outperforming traditional solvers.
The paper introduces a lightweight obstacle avoidance system for nano quadcopters, leveraging a novel 64-pixel multizone time-of-flight (ToF) sensor to safely and effectively navigate complex indoor environments. Tested on the Crazyflie 2.1, the system achieves 100% reliability at a speed of 0.5 m/s, all while using only 0.3% of the onboard processing power, demonstrating its suitability for autonomous operations in unexplored settings.
This paper introduces a method for autonomous localization in nano-sized UAVs like the Crazyflie by fusing geometric data from time-of-flight sensors with semantic information extracted from images. The approach leverages annotated floor plans to improve navigation accuracy without adding extra deployment costs. The system operates efficiently with limited onboard computational resources, achieving a 90% success rate in real-world office environments.
A big thanks, once again, to all of those who gave us their posters!
It’s been over a little year since we started the ROS Aerial Robotics community group together with the Drone Code Foundation, and it is still going strong (blogpost 1, blogpost 2). Since there is a nice mix of people joining the meetings from different backgrounds and drone operating systems, we have had quite a few discussions and overviews of various topics. For instance, we’ve explored courses in Aerial Robotics and other subjects in previous meetings. An important goal of the group has been to make it easier for people to get started with flying robotics, which we’ve achieved by collecting essential information in the ‘Aerial Robotic Landscape’.
Starting out in Aerial Robotics
Let’s cut to the chase: Aerial Robotics is a very challenging field to get started in. Not only do you need a comprehensive understanding of which hardware to acquire, but users also face a multiple choices. These decisions include selecting the right autopilot, simulator for testing ideas, and necessary sensors to achieve autonomy. Unlike the well-established Turtlebot in other robotics domains, there isn’t a universally accepted and field-tested getting-started development drone in the aerial robotics world. While we at Bitcraze would love everyone to go for the Crazyflie, we recognize its limitations. Like, it may not handle outdoor flights with GPS or carry heavy cameras effectively. Our goal, as the ‘Aerial Robotics Community group,’ is to make it easier for beginners by providing users with information about the hardware and software they truly need.
Drone Code Foundation and Bitcraze AB had a keynote speech together at ROSCon 2023 about getting started in Aerial Robotics called ‘Up, Up, and Away: Adventures in Aerial Robotics’. Please take a look at the talk here on Vimeo.
The Aerial Robotics Landscape website
The Aerial Robotics Landscape serves as a repository of information related to all things Aerial Robotics. It started out in the GitHub repository, and it grew due to the discussions held at the aerial robotics community group meetings. Additionally, contributions from both group members and external contributors have played an important role (you can explore the merged PRs).
As the pages and tables expanded, it became clear that a better representation was necessary than just the mere README documentation on the GitHub repository. The group therefore experimented with MKDocs, creating a website in the ‘Read the Docs’ theme. This is a similar theme that important packages within in the ROS ecosystem use, such as the ROS documentation, as well as ROS 2 packages like Nav2 and Crazyswarm2.
The Aerial Robotics Landscape is a dynamic , where development kits emerge while others are discontinued, new simulators rise while some remain unsupported, and autopilot and autonomy features evolve monthly. This ever-changing landscape demands constant updates and additions. We try to do this to the best of our ability, but we can’t do it alone — we need your help.
If you believe that your favorite hardware platform is missing from the landscape, or if you’ve recently developed a new planning algorithm for fixed-wing vehicles or created a YouTube course on optical-based flight, please contribute by means of a pull request to the GitHub repository. We’ve put together a guide on how to contribute to the Aerial Robotics Landscape here. Let’s make the website useful together!
If you’d like to join the ROS aerial Robotics meetings, please take a look at our community github repository for joining information. The next meeting is the 5th of June, 4 PM UTC and was announced on ROS discourse.
Two weeks ago, Arnaud, Barbara and Rik were at ICRA 2024 in Yokohama. At our booth we showed our current products as well as the upcoming brushless Crazyflie and the camera deck prototype.
As usual, the conference has been very busy with a lot of visitors and a lot of very interesting discussion. Thanks to everyone that passed by the booth, we have come back to Sweden with a lot of energy and new ideas!
The autonomous lighthouse swarm demo demo has worked pretty well. If you are interested to know more about it you can visit our event page. It is an autonomous demo with 3 brushless Crazyflies and 6 Crazyflie 2.1s flying autonomously. With the extended battery life of the brushless, we could operate the demo pretty much continuously.
If you’ve been at the conference, you may have spotted someone proudly sporting our exclusive ‘Bitcraze took my poster’ button. We’re excited to have received posters covering a wide range of topics, the walls of our office are eagerly awaiting these visual representations of your hard work and dedication. Thank you to everyone who has contributed.
One of the great features of the stock Crazyflie 2.1 is that it is more or less harmless. The Crazyflie 2.1 brushless weighs roughly the same but has almost twice the amount of thrust force, so a little bit of more care is needed. We therefore decided to provide optional propeller guards. While propeller guards adds safety they also add weight and disrupt the air flow from the propellers. Adding to that, the weight is located far from the center which increases the inertia even further, resulting in a less agile drone. For some applications this is not a problem but for others it is, this is why we are making them optional, meaning they are easy to replace with simple landing legs by utilizing a snap-on fitting.
The design is not fully finalized yet but we are getting close, voilá!
If the design goes according to plan they will also withstand some bumping against walls which will be a very nice feature for many applications.
Further the landing legs and propeller guards are designed in a way so they will detach during high force impacts to prevent the PCB arms from breaking.
“What? You are in Japan? Again!?”. Yup that is right! We loved IROS Kyoto 2022 so much that we just couldn’t wait to come back again. Barbara, Arnaud and Rik are setting up the booth as we speak to show some Bitcraze awesomeness to you! Come and say hi at booth IC085.
The gang before the rush starts!
Crazyflie Brushless and Camera expansion
Of all the prototypes we are the most excited of showing you the Crazyflie Brushless and the ‘forward facing expansion connector prototype’ aka the Camera deck. Here you can see them both in action at a tryout of our demo. We have also written blogposts about both so make sure to read them as well (Brushless blogpost, Camera expansion blogpost)
The Crazyflie Brushless flying with a Camera deck.
Also we will explain about the contact charging prototype (see the blogpost here) and will be showing all of our decks at the booth as well. And of course our fully autonomous, onboard, decentralized peer-to-peer and avoiding swarm demo will be displayed as always. Make sure to read this blogpost of when we showed this demo at IROS 2022 to understand what is fully going on!
We will be providing a ‘special disposal service’ for your conference poster! We would love to see what you are working on and get your poster, because we have a lot of space in our updated office/flight space but a lot of empty walls.
If you hand in your poster at the booth, you’ll get a special, one-of-a-kind, button badge that you can wear proudly during the conference! So we will see you at booth IC085!
My name is Joseph La Delfa, I started in December last year as an industrial postdoc at Bitcraze. This means I work across Bitcraze HQ in Malmö and the division of Robotics Perception and Learning at KTH in Stockholm. I have been designing and researching interactions that involve bodily control of drones for a few years now.
In order of appearance: Demonstrating at a conference, mucking around with the Qualisys tab, coaching at Drone Arena I, playing judge at Drone Arena II, and finally Drone Chi.
Here at Bitcraze I will be using lighthouse decks on the body to control Crazyflie/s, with the aim to produce a wearable sensor that integrates into the Bitcraze ecosystem. The lighthouse positioning system is showing great potential for this application as it gives relatively clean and high-fidelity positional data. Plus now that more than two base stations can be used, we can potentially track the deck from top down and bottom up.
Three motor-less crazyflies are strapped to my arms and tracked using two lighthouse basestations.
This research is a continuation of my PhD thesis, where I designed drone interactions that respond differently to different people, and advocated for a human-drone relationship that evolves over time. Ultimately I hope to demonstrate new use cases for the Crazyflie and expand the already impressive community of researchers who use Bitcraze products!
How to Train Your Drone was a one-month field study in a shared home, where three housemates taught their drones how to fly.
This industrial postdoc is funded by the Wallenberg AI, Autonomous Systems and Software Program (WASP), and you can find out more about my work at www.cafeciaojoe.com :D