There has been some extended work lately related to the Lighthouse positioning system. The goal of this work is to expand the maximum base station number to 16 enabling the system to cover larger areas and support more complex use cases.
Previous work
One previous attempt to enable multiple base stations using the current lighthouse deck left us with a highly untested “hacky” solution. After flashing the Crazyflie with the proper firmware, this solution requires to strategically position the base stations so that no more than 4 are visible at any given time. Then, the geometry estimation that is normally carried out by the cfclient has to be done through the multi_bs_geometry_estimation.py script in the cflib.
Last year we developed a prototype deck, used in last year’s holiday video, that had a bigger FPGA to receive the lighthouse signals and an esp32 to be able to decode and filter most of the lighthouse pulses onboard the deck. This approach ended up not working for us since it still included the moderately-hard-to-develop FPGA and the algorithm we implemented in the esp32 to identify lighthouse V2 pulses happened to be not fast enough to handle enough base stations.
Current limitations
A key factor that currently limits the maximum number of usable base stations is the Lighthouse deck which can’t handle more than 4 visible base stations at a time. Additionally, the Crazyflie’s STM32 is doing all the filtering and 16 base stations generate so much data that it would exceed the compute and memory budget we have in the Crazyflie. This was one of the main reasons to add a MCU in the deck of our last-year prototype.
Ongoing progress
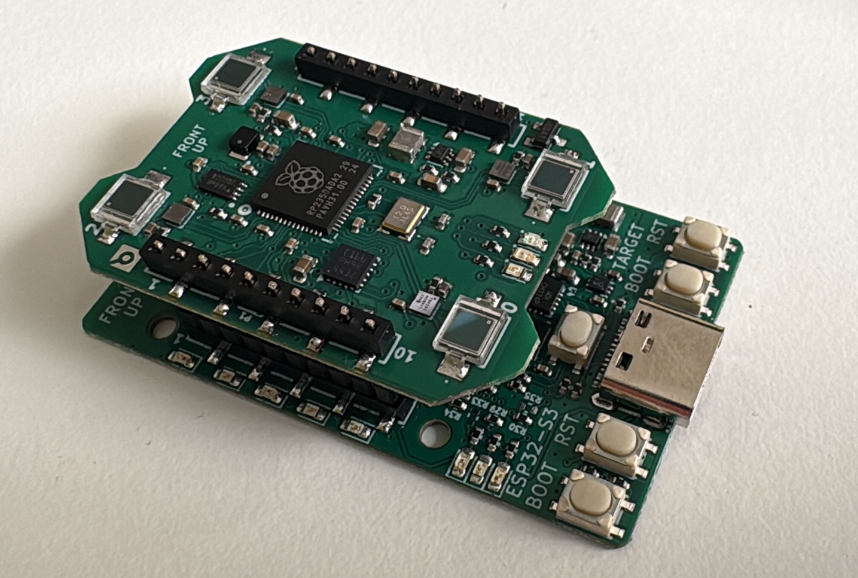
The last couple of months we have redesigned a new LH-16 deck containing a RP2350 microcontroller so that part of the computation and filtering can take place on the deck, rather than on the Crazyflie. With a deck like this, it should be possible to receive large amounts of data from the base stations and filter some of it out to finally estimate the Crazyflie’s position in the Crazyflie’s STM32.
This deck has been designed to run a firmware developed by Said Alvarado-Marin from the AIO team at Inria in Paris. This firmware is able to acquire, decode and identify the FM1-encoded LFSR data stream we get from the base stations without the help of an FPGA or a big look-up table. This allows to greatly simplify the hardware and software by using only one microcontroller on the deck.
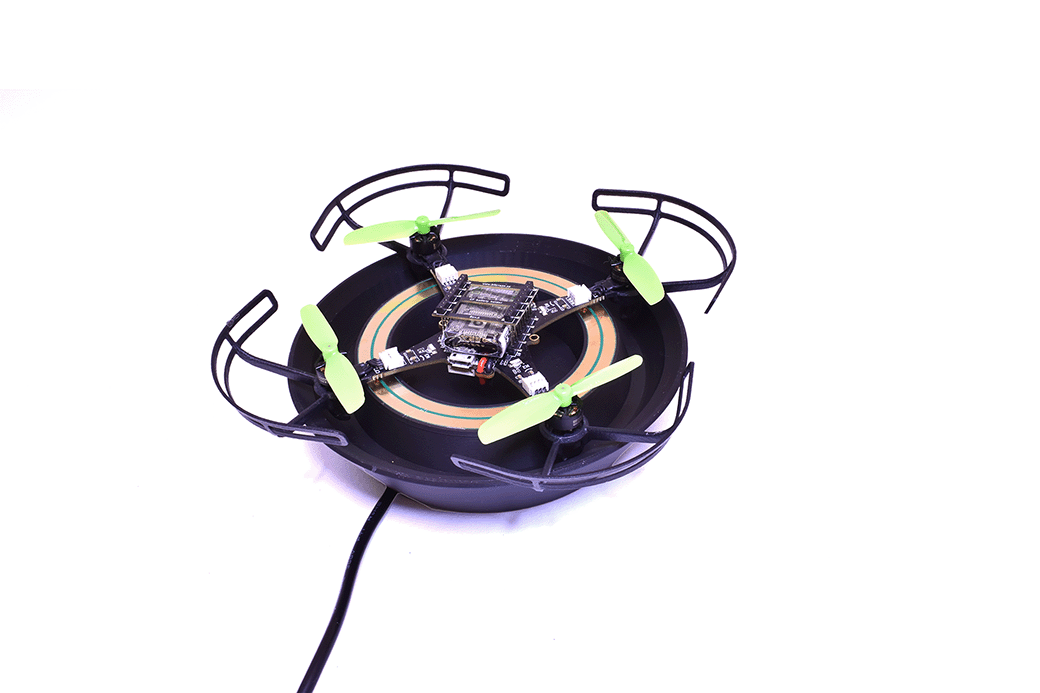
We are currently bringing-up the prototype and hope to be able to soon fly in our lab with 16 base stations. We will also be looking at making a standalone lighthouse receiver for other robots and applications. For the curious: the board under the deck in the picture in a debug board that contains everything we might need for making a standalone receiver plus everything needed to bring-up and debug the deck until we have it ready to fly.