Last week we blogged about the early release version of the lighthouse deck and showed a nice push-around demo of the Crazyflies using the Vive controller. Now we wanted to push the system even further, by making a Lighthouse Painting!
We started by adding a LED-ring deck on the bottom of the CrazyFlie 2.1 with the lighthouse deck attached to the top. We were able to access the input of the track pad of the Vive controller and link it to a specific color / hue value. The LED ring can display any color possible in the RGB range, so in theory, you could paint in whatever color you like. For now, the brightness was fixed, but this could be easily added to the demo script as well.
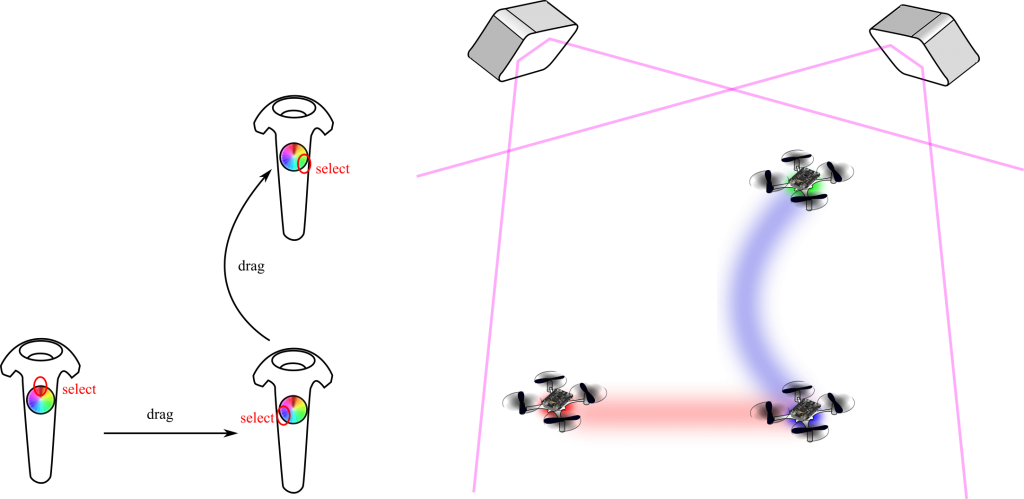
To capture the light trace, we needed to make a long-exposure image, therefore, the flight arena need to stay completely dark. Luckily, this was easy to do for us since we do not have any windows in our new testing arena. Our camera is the Canon D5600 with a manually controlled shutter time setting selected (press to open the shutter and press again to close the shutter). The aperture setting was set at F-22. Nevertheless, this is very depended on the environment, so we had to do some trial-and-error in order to get this parameter right.

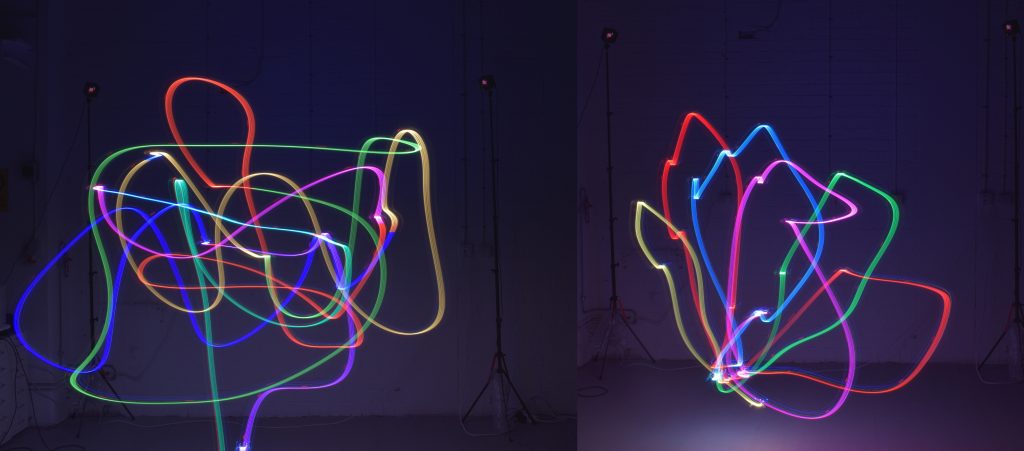
Once we had the set-up finished, we made several long exposure photo paintings with one person controlling the camera and another painting the picture into thin air. Of course, the artist would need to imagine its creation, as we were not able to see the result until after the picture was taken. Also, big gestures were required in order to complete the painting, as the Crazyflie’s and the Vive controller’s movements were synced 1:1, so adding some multiplication factor would come in handy. Nonetheless, the results were amazing.
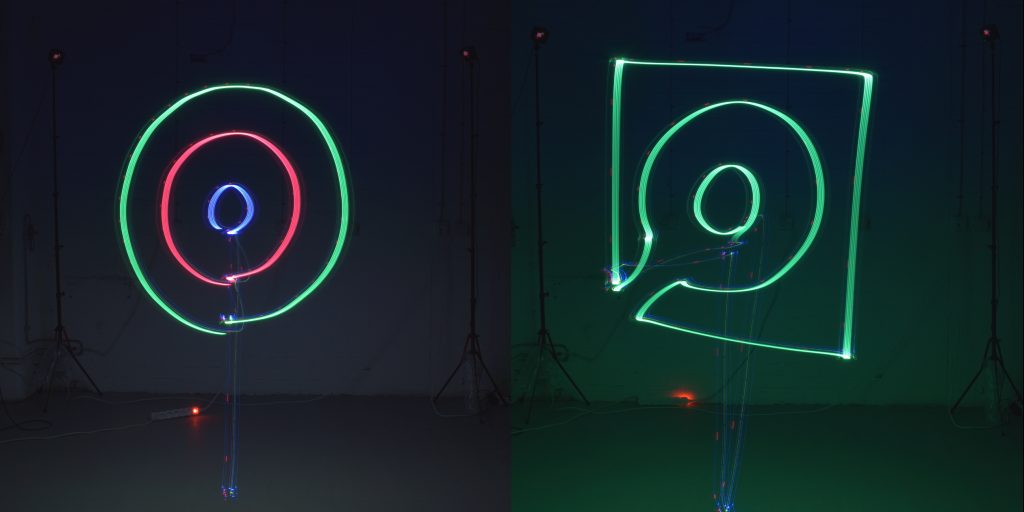
We took it even further, by making the Crazyflie fly a predefined trajectory and planned color scheme without the Vive controller. First, it flew three concentric circles in green, red and blue with the high level commander with the PID controller setting. But, the circles would probably be closed-off more properly with the Mellinger controller setting. We also were able to reproduce the Bitcraze logo in the same fashion. In both long-exposure photos, it still possible to see the Crazyflie, as it is still traceable due to its routine LED functionality, so you can easily observe where it took off, and where it flew in between shapes.
The demo python scripts of the above flights can be found here:
An we also took a video of the Bitcraze logo being drawn. The mobile phone camera had some problems focusing in the dark, but it gives a good idea of how things works: