It’s always a good feeling to wrap up the week with a Fun Friday project – especially when it involves some questionable mechanical additions to a Crazyflie platform. This time, I decided to test the capabilities of the upcoming Color LED deck by turning it into a Disco deck.
Mechanics
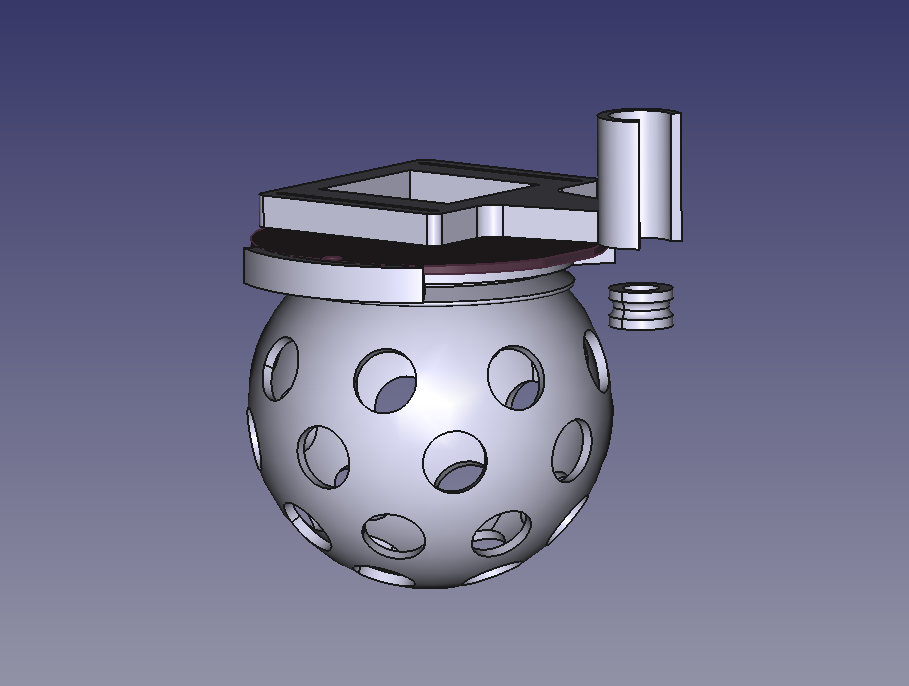
The core of the Disco Deck is pretty simple: a 3D-printed disco ball mounted directly on top of the Color LED Deck with a couple of screws. To bring it to life, I added a Sub-Micro Plastic Planetary Gearmotor and used a rubber band as a drive belt to transfer the rotation. It’s a lightweight, low-tech solution that works surprisingly well with the Crazyflie 2.1 Brushless. All the structural parts were designed to be easily 3D printed in PLA, and they fit on a single print plate for a quick build. You can find all the part files here.
Electronics & Firmware
On my first attempt, I connected the motor directly to VCC and GND, which meant it started spinning as soon as the Crazyflie powered up. This turned out to be a problem as the vibrations prevented the Crazyflie from completing its initialization sequence, since it needs to remain completely still for about one second at startup. The proper fix was to connect the motor to one of the GPIO pins (IO_4) along with GND. For the firmware, I added a new deck driver for setting the IO_4 output to low during initialization and controlling it through a parameter.
Next Steps
The biggest limitation of the current Disco Deck design is the landing. The disco ball extends below the length of the Crazyflie 2.1 Brushless legs, which means the drone can’t take off or land horizontally – not even when using the standard Crazyflie 2.1 Brushless charging dock. To fix this, I’m planning to design a custom charging dock that also works as a stable landing platform for the Party drone.
If you’re interested on the process, you can check out the project repository for any updates.
It’s been a while since our last update on what started as the High powered LED deck prototype. We have finally had time to push this project forward and are aiming to have a release at the beginning of 2026.
A New Name and a Familiar Design
You might notice that the deck has a new name, something simpler and a bit catchier, the Color LED deck (bottom-mounted and top-mounted). The overall design and specs, however, remain very similar to the original concept:
Using a highly efficient high powered LED for maximum brightness
DC/DC driving circuitry for improved efficiency and consistent performance
A light diffuser for smooth, even illumination and wide visibility
Two versions, top or bottom mounted, depending on your build
The Color LED Deck brings fully programmable lighting to your Crazyflie, allowing you to create and control custom light patterns in real time. It’s useful for flying in darker environments, for visual tracking experiments, or for adding synchronized light effects in drone choreography. The deck is now also compatible with the Crazyflie 2.1 Brushless, bringing dynamic lighting to our most recent platform for the first time.
Software architecture
This deck will also be the first to use the new DeckCtrl architecture. If you’re curious about how that works, you can read more about it in this earlier blog post.
The Color LED deck has some intelligence built into it that runs on a STM32C0 MCU. The open-source firmware is still under development, and the repository can be found here.
Availability
The final pricing is still being determined, but make sure to sign up for the in-stock notification at the Color LED deck store pages (bottom-mounted and top-mounted) to get an update as soon as it’s available. And as always, keep an eye on the blog for more updates as we get closer to release.
At the beginning of the year, we released the Crazyflie 2.1 Brushless charging dock. This project was very much an experiment for us since this is the first product we are mainly manufacturing and assembling by ourselves in Sweden. We though we would write a little bit about the reason we made it that way and how it is going.
The Chaging dock is already described in a brunch of peviousblock post. It is basically a landing pad for the Crazyflie Brushless that charges the Crazyflie when landed. This is an idea and a design we have been using for years for our fair demos and that has been very useful, we would not be able to continuously fly at fair without it! Some of us even started using is on their desk to keep their Crazyflie Brushless fully charged at all time while developing with it:
However, even though it has been so useful for us, and we designed the Crazyflie Brushless to be compatible with contact-charging, we where not sure of how many people out there would want or need such a charging dock. So we decided to make it available in an experimental manner by manufacturing it by ourselves!
Why ‘made in Malmö’?
While the manufacturing we have in place for all our other products works really well, it requires a non-trivial amount of effort to start the first manufacturing batch. This is mainly due to the fact that the full mass production chain needs to be setup for the first batch and that production happens outside Bitcraze, this requires a lot of work in documentation, planning and administration.
However by doing the production in house, we are able to fix issues as they arises and to work in a much more agile way. In house production will of course no scale, but for a proof of concept it might work, this is at least what we wanted to experiment with.
There are two main improvements that has allowed us to even consider in-house experimental production: the advent of cheap and efficient PCBA services and the improvement in 3D printers reliability. This allows us to source all the parts and assemble them to make the final product.
How is a Charging Dock made?
The charging dock is comprised of two main parts: the plastic landing pad and the electronic.
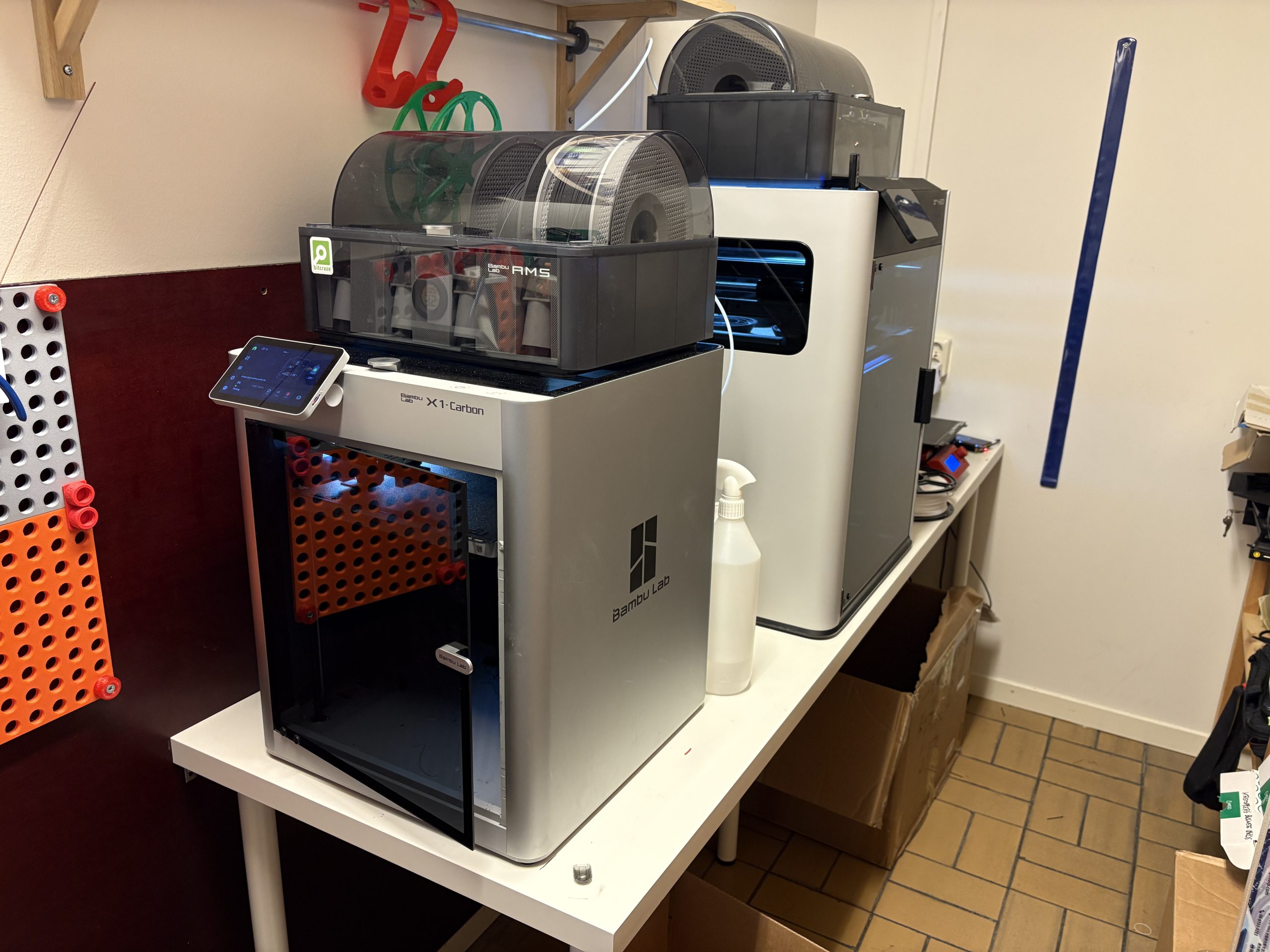
The Landing pad is 3D printed by us. We now have a mini-print-farm at the office (if a Swarm starts at 2 drones, a print farm shall start at 2 concurrently running printer :):
What made it possible for us to consider running this kind of production was when we got our Bambulab X1 carbon. It is much more reliable and most importantly easier to maintain that any printer we got before, which gave confidence that we could start making products of what we printed. We now have an H2D as well. This currently allows us to print 12 landing docks per working day.
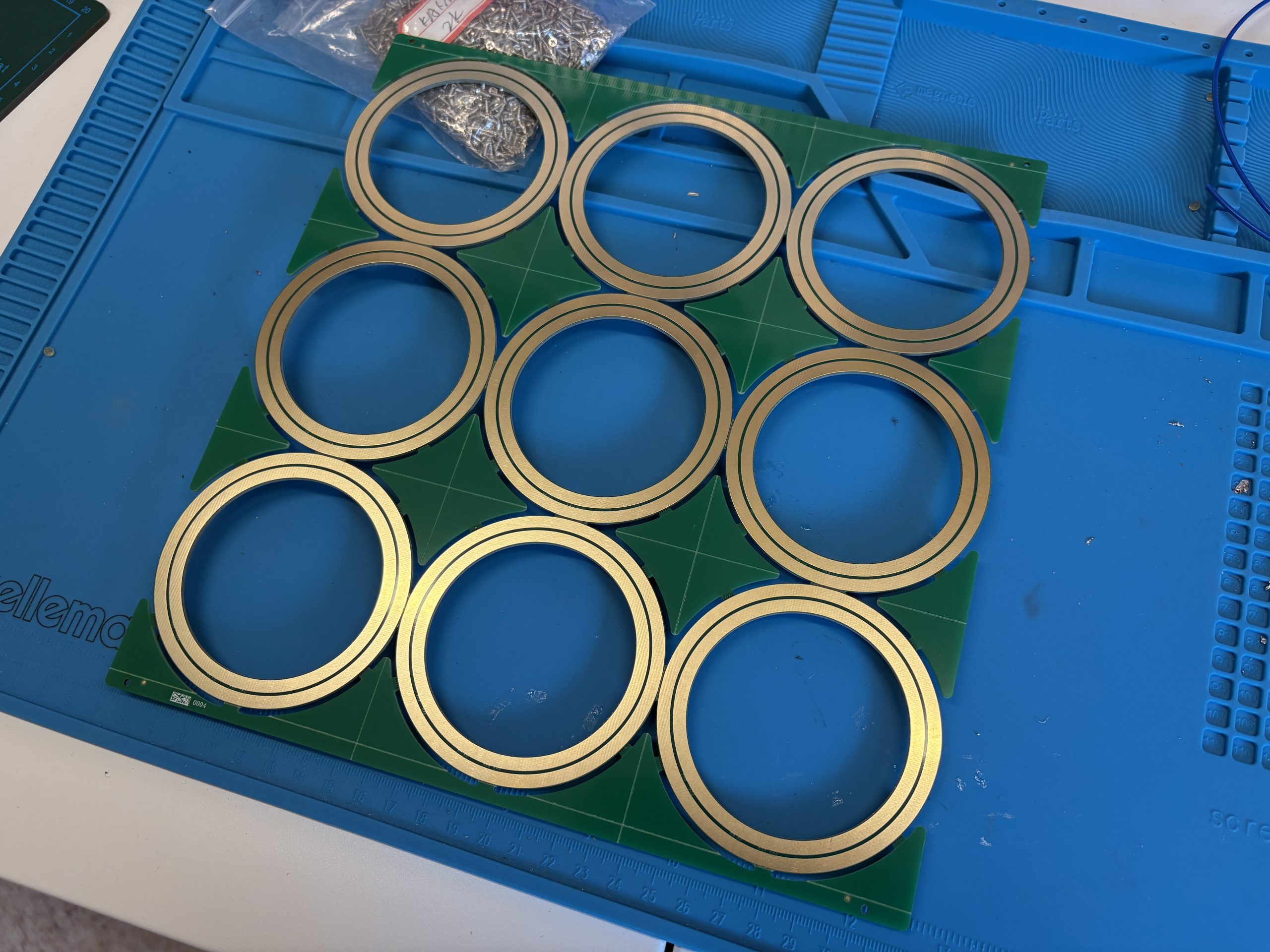
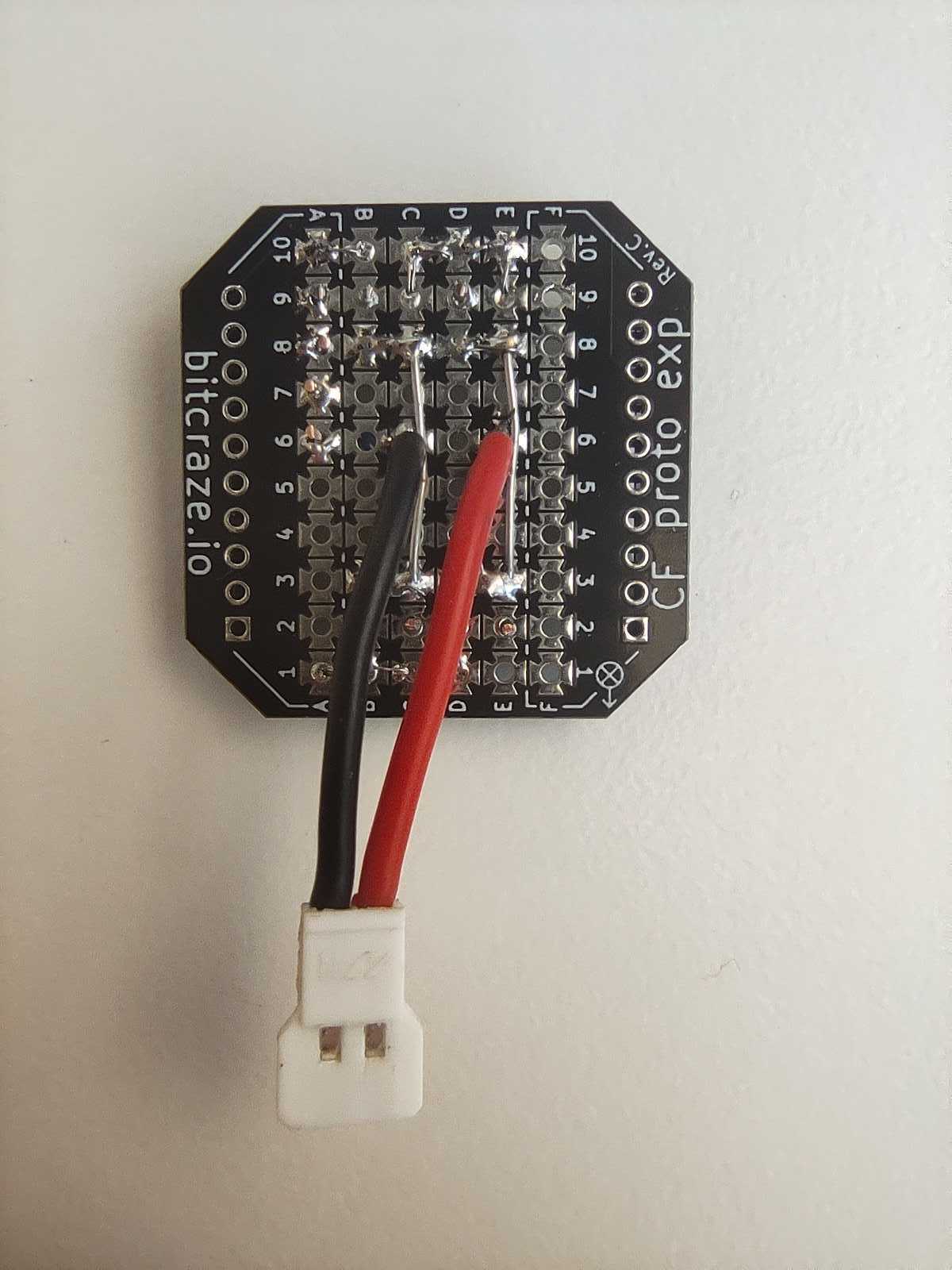
On the electronic side, we are now able to order fully assembled PCB, and even custom cable within weeks.
All we then need is assembly and testing and we got ourselves a small production line with very little risk and a lot of flexibility.
What now?
We are very pleased with what we have achieved so far with the charging dock. The first batch is sold out and we have started manufacturing a new batch with no big pain-point in sight. At some point we will have some decision to take though: do we continue in house or transition to more traditional manufacturing? Will all the work we put so far be useful for setting up mass manufacturing or will we have to restart from zero? At what batch size or frequency will we need to transition?
However this is also one of the great advantage of this: we have full control and we can decide when to manufacture where. As we have talked a bit previously, Bitcraze is a self-organized company, and this experiment actually fits very well with our way of working and keeps us agile. We hope this can free us from the doubts we usually have when thinking about more ‘niche’ products and will allow us to try new things in the future.
The ability to attach expansion decks to the Crazyflie platforms without modifying their electronics allows experimenting with different hardware components. Most existing decks contain different types of sensors that are used for positioning and collecting data. On this Fun Friday project that has been running for the past couple of months, I explored adding mechanical principles to the Crazyflie with the long-term goal to create a working claw to grab and transfer objects.
The claw
The claw mechanism is built on a DC motor. The motor shaft is connected to a worm gear, which drives the claw to open or close depending on the direction of rotation. All the parts are 3D printed and designed from scratch.
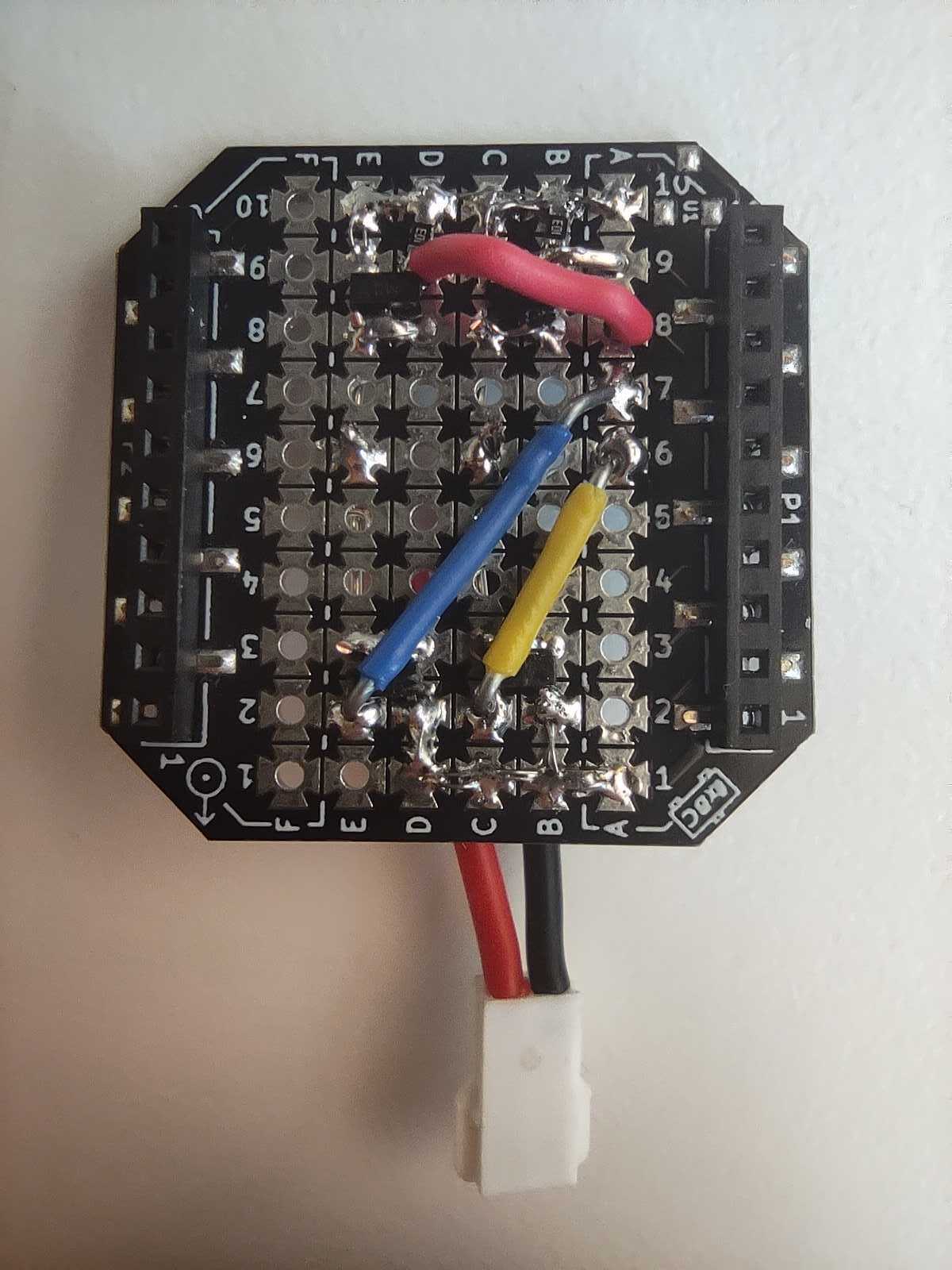
The deck
Making the DC motor rotate in both directions requires reversing its polarity, which can be done using an H-bridge. So, the deck controlling the claw, is essentially an H-bridge that uses VCC 3V, GND and 4 GPIO pins on the Crazyflie. This way it can be compatible with the Lighthouse positioning deck. The circuit consists of 4 Mosfets (2 P-type and 2 N-type) and 2 pull-down resistors.
How it works
When designing a custom deck for the Crazyflie, you need to initialize it with its own drivers. The drivers for the H-bridge deck contain 2 basic functions; the one that opens the claw and the one that closes it. They are triggered using 2 float parameters (clawOpen and clawClose), and remain active for the number of milliseconds specified by the value of each parameter.
Experiments
Since the entire claw setup weighs 29g, I used 2 Crazyflie 2.1 Brushless drones, to equally share the weight, while one of them controls the claw. Together, they can lift up to 74g. A fishing line is attached underneath each drone and the claw can slide along it, keeping it always centered between them. For the load, I used a Crazyflie 2.1+ with a lighthouse deck attached and its motors removed, to reduce its weight. When the script starts, the initial positions are collected and a flight sequence for the swarm is created based on them. Then, the swarm takes off and approaches, grabs, lifts and transfers the load.
Next steps
The initial goal of grasping and transferring objects with a flying claw has been achieved. However, in the future I plan to make the system more robust and easy to use. Some points that I might focus on:
Making the whole setup lighter – replace the current motor with a lighter one, print with lighter materials.
Improve the controller tuning to damp the oscillations and make the flight more stable.
Implement a control system to keep track of the claw’s state – add limit switches.
As some of you may have noticed, the current LED-ring deck doesn’t play nice with the Crazyflie 2.1 Brushless. The culprit? A resource clash between the DSHOT motor signals and the WS2812 LED driver used for the LED-ring.
But good news! We’re prototyping a new LED deck that solves the conflict by switching to I2C communication. Not only does this fix the compatibility issue, it also gives us a chance to improve its features. Here’s what we’ve improved so far:
Using a highly efficient high powered LED
DC/DC driving circuitry to improve LED driving efficiency
1W on each channel (red, green, blue, white)
LEDs on both sides so it can be mounted both on top or on bottom of the Crazyflie
LED-deck with a 3D-printed diffuser mounted underneath the Crazyflie 2.1 brushless
The LED we’re using is very powerful and the light is emitted from a small area, so a light diffuser is needed to get a more pleasant light. Designing something that can be manufactured is the next step of the project. Make sure to follow our blog to get more updates on this project.
While planning for the Crazyflie 2.1 Brushless release we also decided to make our charging dock available to our users. We wanted our users to be able to make the same kind of demos we were making in our lab and showing off at fairs. To make this happen our 3D printer has been working around the clock the last couple of weeks, churning out as many charging docks as possible. And now we’re finally ready to put some in stock 🎉 So make sure to check out the Charging dock in the E-store if you want to keep your Crazyflie 2.1 Bushless ready to fly at all times!
The charging dock is the same version we use in our flight lab, you might have spotted it in previous videos (like this one from last week). It’s also the dock we will be using our for swarming demos at fairs (like this one) in the future. Compared to the Qi deck, using this solution we save a lot of weight as well as maintain the possibility of having downwards-facing decks (like the Flow) mounted.
Although the main usage is for swarming (with autonomous takeoff/landing) you can also use it as just a charging dock, placing it here each time you’ve done some flying in the lab. This ensures that your Crazyflie is prepared for the next round of experiments.
If you’re interested in seeing a bit of history, have a look at some of our older blog posts about the charger. From the first prototypes, passed a fancy version with LEDs and WiFi and finally ended in the currently more sleek version we have today.
The Crazyflie 2.1 Brushless with propeller guards on a prototype charging padThe optimized brushless motor
Finalizing the integration of the Crazyflie 2.1 Brushless into our software ecosystem and expanding its documentation were key steps in preparing for its launch. These efforts ensure compatibility, improve the user experience, and make the platform more accessible to the community. We’re looking forward to a smooth launch and to seeing how the community will utilize the new platform!
This year, we introduced updates to the Crazyflie 2.1 kit, making the 47-17 propellers the new default and including an improved battery. These upgrades enhance flight performance and endurance, culminating in the release of the Crazyflie 2.1+—an optimized iteration of our established platform.
And don’t forget the developer meetings, where we shared some more behind the scenes information and collected invaluable feedback from the community.
We also released a new edition of our research compilation video, showcasing some of the coolest projects from 2023 and 2024 that highlight the versatility and impact of the Crazyflie platform in research.
Team
In the past year, Bitcraze saw significant changes within the team. in February, Rik rejoined the team. Tove started at Bitcraze in April. Mandy, with whom we’ve already worked extensively over the years, joined as our production representative in Shenzen. At the end of the year, we said goodbye to Kimberly, whose contributions will be deeply missed. Additionally, we had Björn with us for a few months, working on his master’s thesis on fault detection, and Joe continued his industrial postdoc at Bitcraze that began in December 2023. Looking ahead, Bitcraze is hiring for two new roles: a Technical Sales Lead and a Technical Success Engineer, to support our ongoing projects and customer collaborations.
Midsummer lunch with the teamChristmas-themed Bitcraze office
As we close the chapter on 2024, we’re proud of the progress we’ve made, the connections we’ve strengthened, and the milestones we’ve reached. With exciting launches, new faces on the team, and continued collaboration with our community, we’re ready to soar to even greater heights in 2025. Thank you for being part of our journey!
Ever since we started going to fairs to show off the Crazyflies, we’ve been trying to push the boundaries for the demos. Often we’ve used the fairs as an opportunity to either develop new functionality or try out new ideas. Something we’ve always been interested in, especially for fairs, is autonomous flights. It’s hard to talk to people about the Crazyflie while trying to fly it at the same time. Back in 2015 we were using the Kinect for piloting the Crazyflie at the Bay Area Maker Faire. Although awesome, we had a slight issue: we needed to switch batteries on the Crazyflie each flight. We had a Qi deck for wireless charging but no positioning system good enough to use it for landing on a charger.
Latest iteration of the Crazyflie Brushless charger
In 2018 we were really excited when we got to borrow a motion capture system from Qualisys and could finally land on a Qi charger (3D printed base and an IKEA Qi charger). First time we showed this off was at IROS in Madrid 2018. The following year we improved the demo to have more Crazyflies and switched to the Lighthouse positioning system at ICRA 2019. Since then each year we have been improving the demo until we’ve reached the current state we showed off at IROS 2022 in Kyoto.
So since 2018 we’ve been using the Qi wireless charging for our demos. Many customers have purchased the Qi charging deck, but building a matching charging platform has always required some effort. So, a while back we started looking at something that could replace the Qi deck, with a lighter solution which would also allow users to have other decks with electronics facing downwards. The first prototypes were made with the Crazyflie 2.1 back in 2021 using decks, but they were a bit clumsy. For one thing you needed the charging solution to be integrated on each deck.
When work started on the Crazyflie Brushless we realized we had the possibility to integrate the charge points directly on the main PCB which meant we could still use any decks we wanted and get the charging. So the prototypes from 2021 were reshaped into something we could use with the Crazyflie Brushless. Although the prototypes worked well, they were pretty big and packed with features which weren’t needed for charging (like LED lights and WiFi). Another iteration and the chargers have now gone down in size and complexity. The latest iteration only has charging and is powered via our 12V power block or 5V USB-C.
Over the years lots of customers have asked us for buying the Qi charger, since many users do not have the capabilities to build their own. Unfortunately we’ve never gotten around to it, but with the release of the Crazyflie Brushless we would like to change this. The release is only a few months away so we’re short on time for remaking the design so it’s usable for plastic molding. Instead the plan is to make a limited amount of prototypes available to our users, based on the same 3D printed design and electronics we’re currently using in our flight lab, at the time of release. This will enable our users to easily try out the design and create their own autonomous demos which will keep flying for a long time.
For the upcoming Crazyflie 2.1 brushless we developed, together with a leading motor manufacturing brand, a brushless 08028 motor, targeting high quality and high efficiency. The 08 – stator size motors are usually optimized for high power output, to serve the FPV market, but we where aiming for high efficiency. This means fitting maximum amount of copper around the stator, lowering KV, thin stator lamination sheets and high quality dual ball-bearings.
Specification
Stator size: 08028 (8.4mm x 2.8mm)
Stator lamination sheets: 0.2mm
Motor KV: 10000
Internal resistance: 0.52 Ohm
Weight: 2.4g
Dual ball-bearing design, using high quality NSK or NMB brands.
1 mm shaft, 5 mm length
Matching propeller: Bitcraze 55-35mm
Peak current 1.8A, peak power 7.2W -> 30g thurst @ 4V (using 55-35)
Rated voltage: 4.2V
Together with the bitcraze 55-35 mm propeller we manage to achieve a system efficiency of over 5 W/g during hover, not to shabby. As a reference, FPV setups normally achieve around 2 W/g. This will bring the hover time for the Crazyflie 2.1 brushless, in the barebone configuration, a bit over 10 minutes.
As researchers passionate about UAV technology, we are excited to share our recent findings on how structural defects affect the performance of nano-quadcopters. Our study, titled “CrazyPAD: A Dataset for Assessing the Impact of Structural Defects on Nano-Quadcopter Performance,” offers comprehensive insights that could greatly benefit the Crazyflie community and the broader UAV industry.
The Motivation Behind Our Research
Understanding the nuances of how structural defects impact UAV performance is crucial for advancing the design, testing, and maintenance of these devices. Even minor imperfections can lead to significant changes in flight behavior, affecting stability, power consumption, and control responsiveness. Our goal was to create a robust dataset (CrazyPAD) that documents these effects and can be used for further research and development.
Key Findings from Our Study
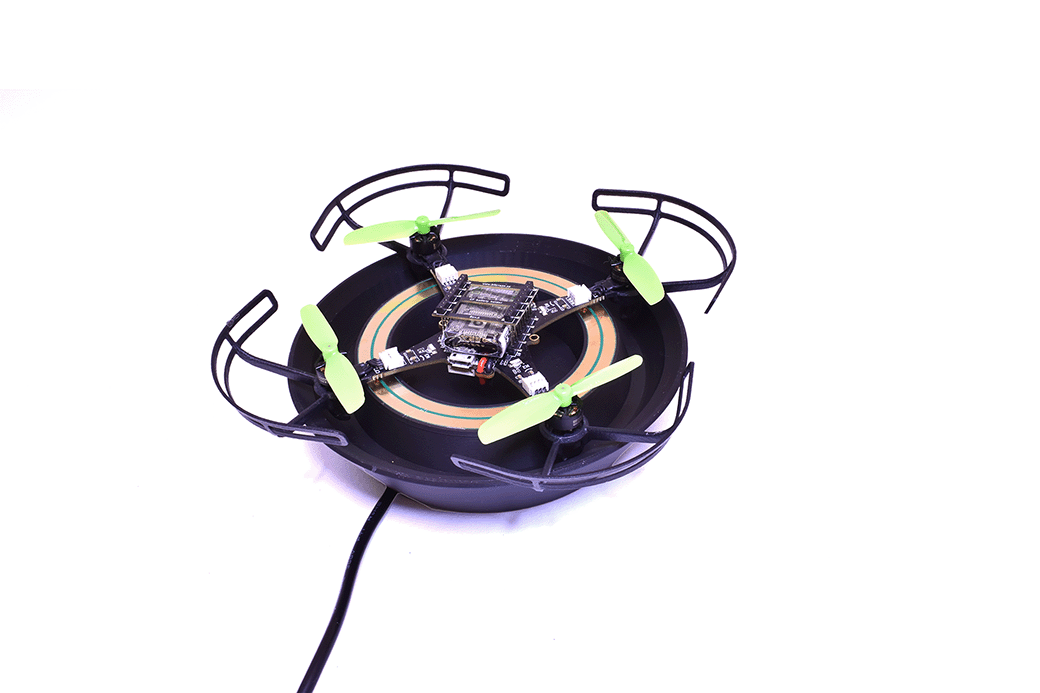
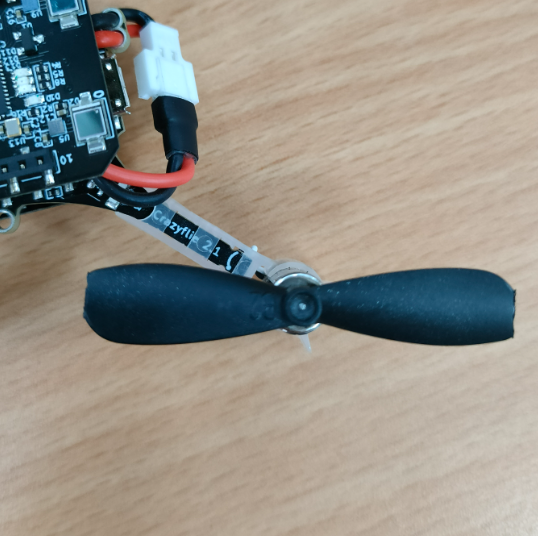
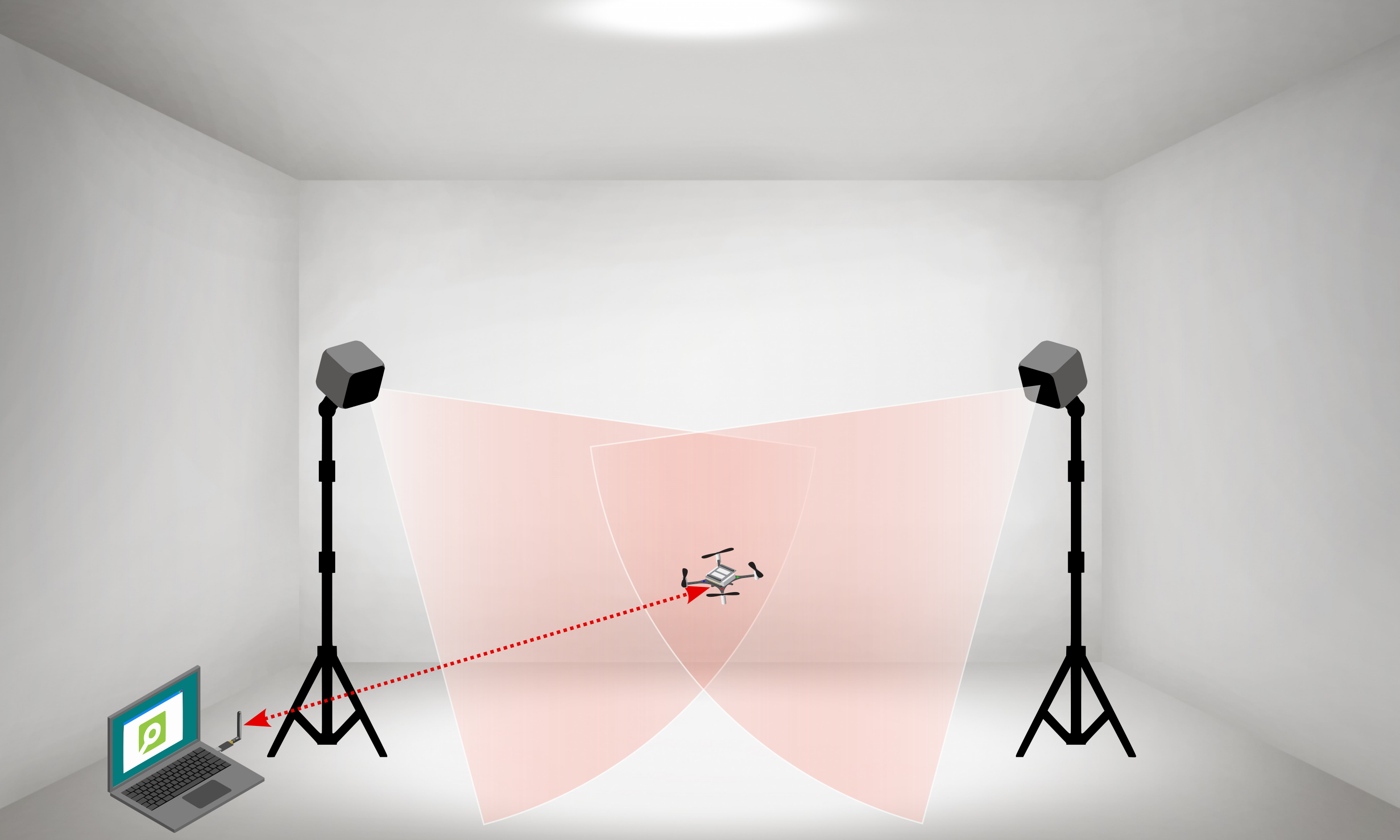
We conducted a series of experiments by introducing various defects, such as added weights and propeller cuts (Figure 1), to nano-quadcopters. For the experiments, we used the Lighthouse Positioning System with two SteamVR 2.0 virtual reality stations (Figure 2).
Figure 1. Propeller with two side defects
Figure 2. Schematic of the experimental setup with Lighthouse Positioning System
Here are some of the pivotal findings from our research:
Stability Impact: We observed that both added weights and propeller cuts lead to noticeable changes in the stability of the quadcopter. Larger defects caused greater instability, emphasizing the importance of precise manufacturing and regular maintenance.
Increased Power Consumption: Our experiments showed that structural defects result in higher power consumption. This insight is vital for optimizing battery life and enhancing energy efficiency during flights.
Variable Control Responsiveness: We used the standard deviation of thrust commands as a measure of control responsiveness. The results indicated that defects increased the variability of control inputs, which could affect maneuverability and flight precision.
Changes in Roll and Pitch Rates: The study also highlighted variations in roll and pitch rates due to structural defects, providing a deeper understanding of how these imperfections impact flight dynamics.
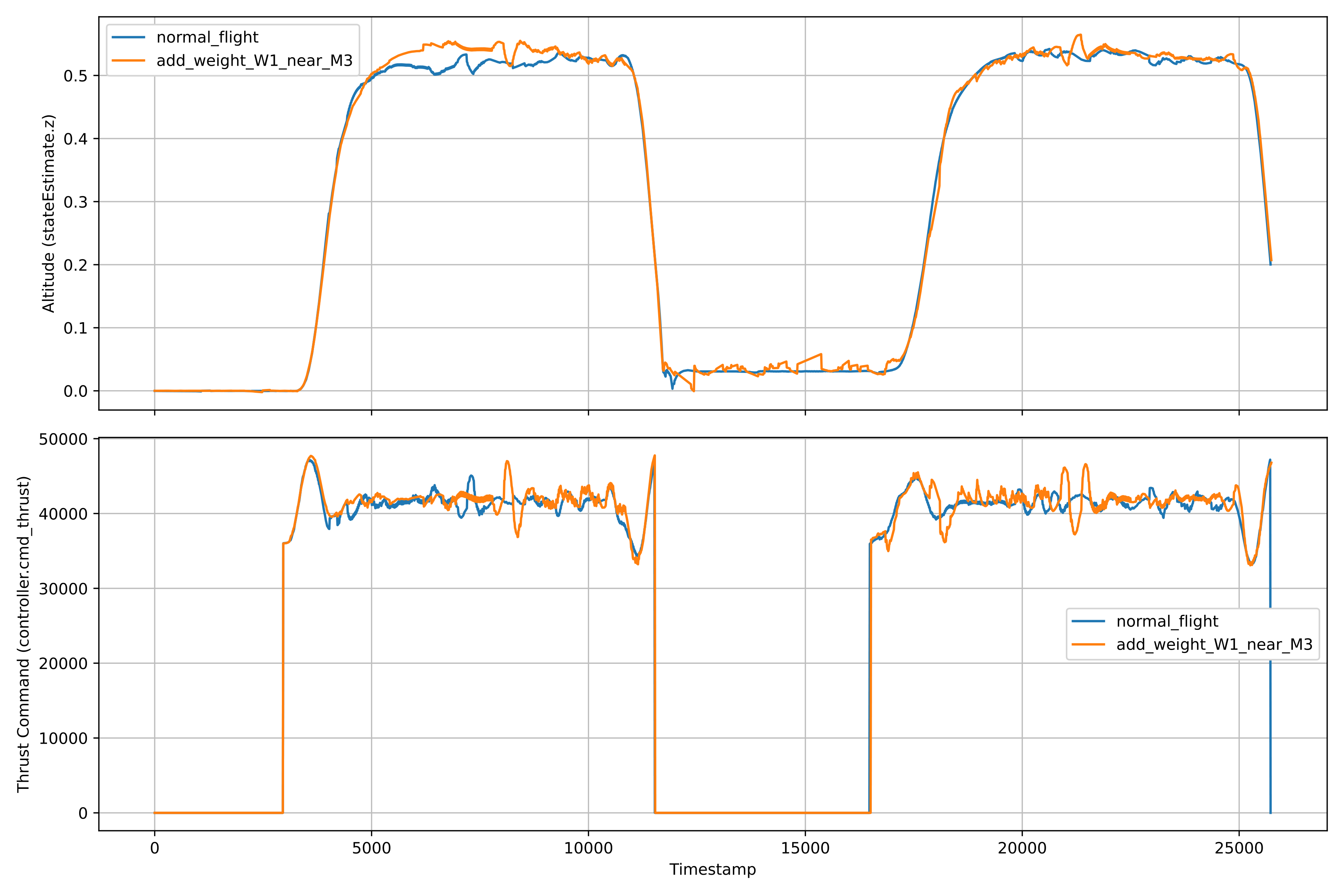
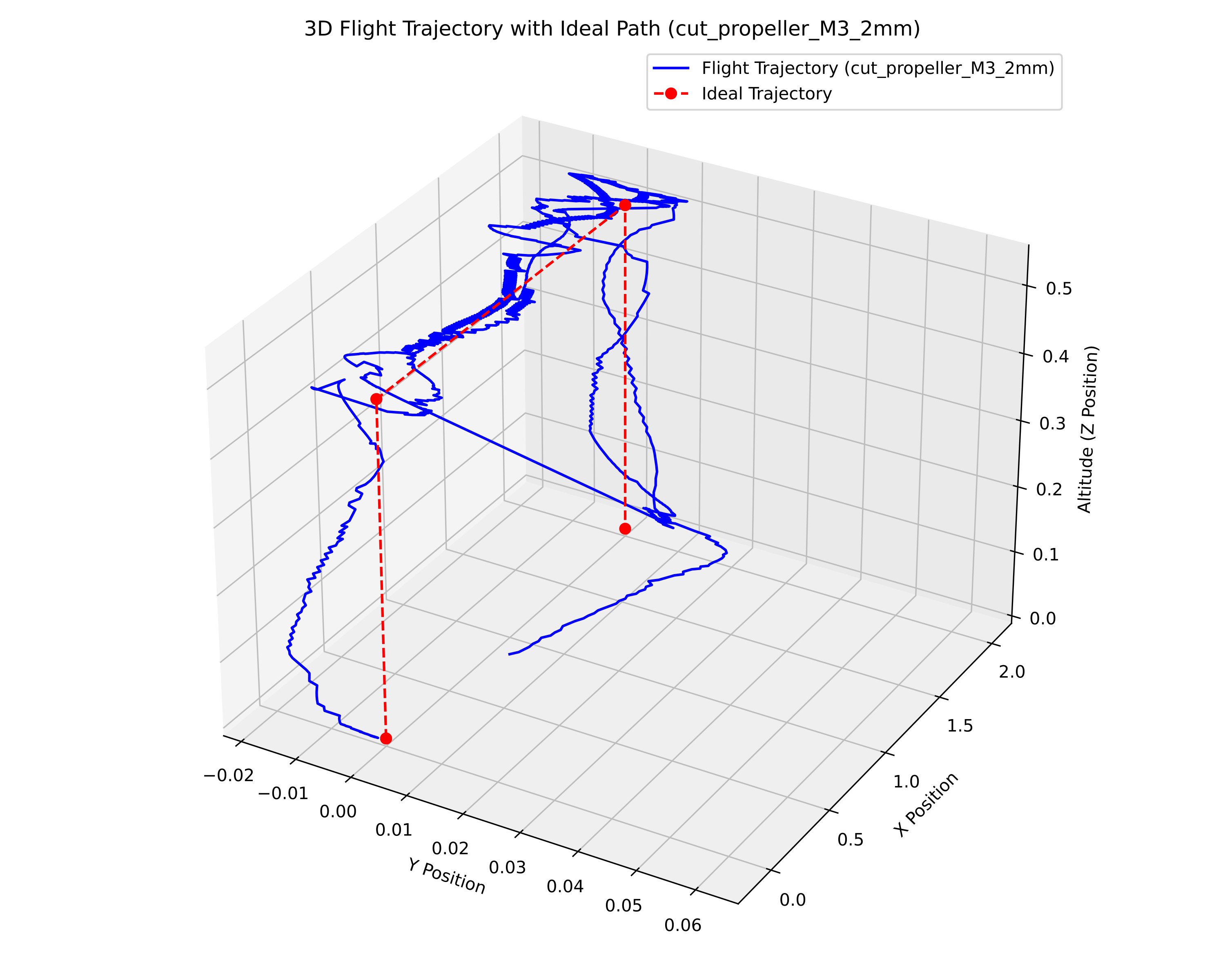
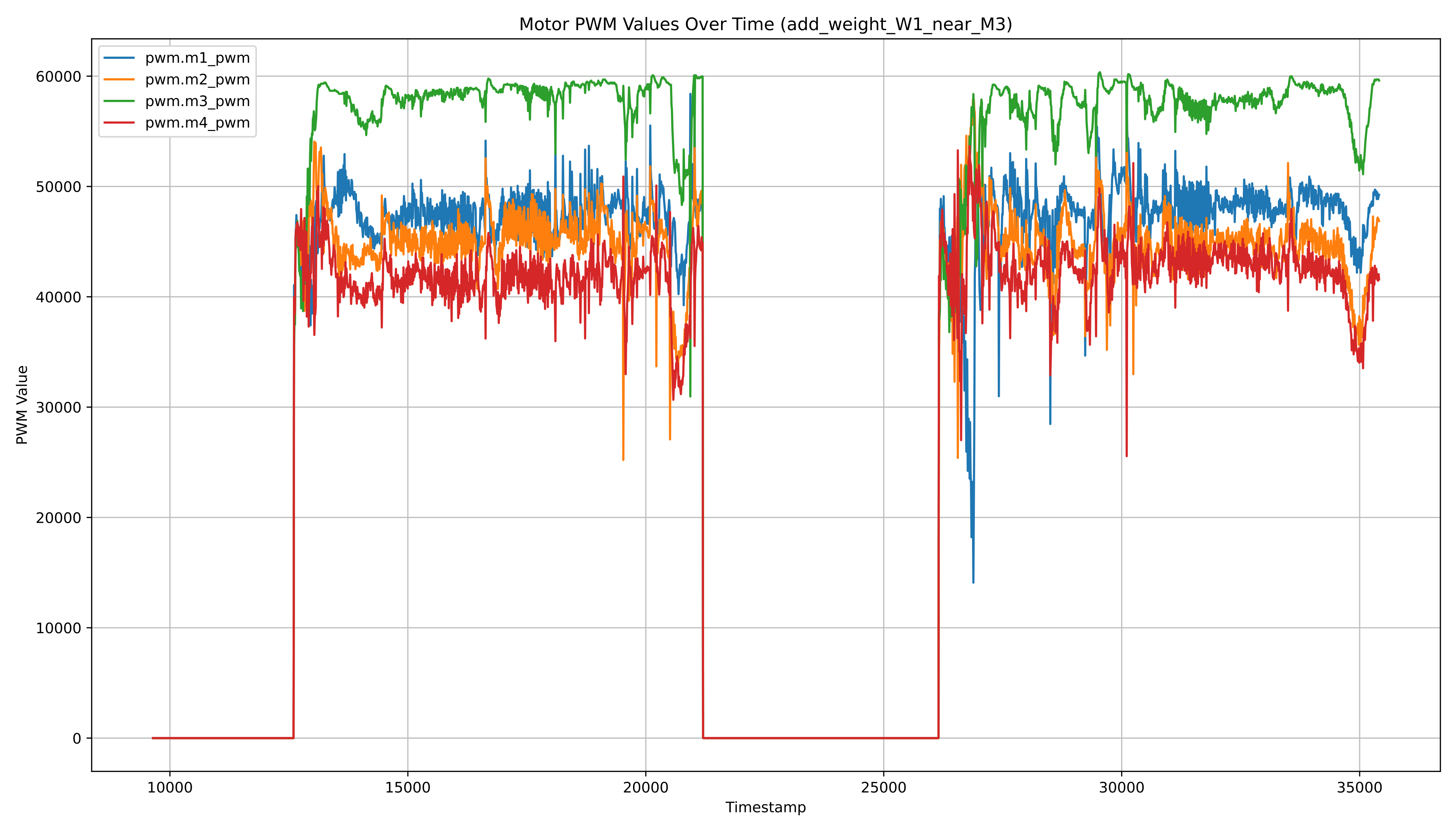
We show Figure 3 as an example of a graph obtained from our dataset. In this figure, you can see the altitude and thrust command over time for different flight conditions. The blue line represents the normal flight, while the orange line represents the flight with additional weight near the M3 propeller. In Figure 4, you can see the 3D flight trajectory of the Crazyflie 2.1 quadcopter under the cut_propeller_M3_2mm condition with the corrected ideal path. The blue line represents the actual flight trajectory, while the red dashed line with markers represents the ideal trajectory. Figure 5 shows the Motor PWM values over time for the add_weight_W1_near_M3 condition. The plot shows the PWM values of each motor (M1, M2, M3, and M4) as they respond to the added weight near the M3 propeller.
More examples of graphs obtained from the CrazyPAD dataset can be found in our research paper specifically describing this dataset: https://doi.org/10.3390/data9060079
Figure 3. Altitude and thrust command over time for different flight conditions
Figure 4. 3D flight trajectory of the Crazyflie 2.1
Figure 5. Motor PWM values over time
Leveraging Research for Diagnostic and Predictive Models
One of the most exciting aspects of our research is its potential application in developing diagnostic and predictive models. The CrazyPAD dataset can be utilized to train machine learning algorithms that detect and predict structural defects in real-time. By analyzing flight data, these models can identify early signs of wear and tear, allowing for proactive maintenance and reducing the risk of in-flight failures.
Diagnostic models can continuously monitor the performance of a UAV, identifying anomalies and pinpointing potential defects. This real-time monitoring can significantly enhance the reliability and safety of UAV operations.
Predictive models can forecast future defects based on historical flight data. By anticipating when and where defects are likely to occur, these models can inform maintenance schedules, ensuring UAVs are serviced before issues become critical.
Why This Matters for the Crazyflie Community
The CrazyPAD dataset and our findings offer valuable resources for the Crazyflie community. By understanding how different defects affect flight performance, developers and enthusiasts can improve design protocols, enhance testing procedures, and ensure higher safety and performance standards for their UAVs.
We believe that sharing our research with the Crazyflie community can lead to significant advancements in UAV technology. The dataset we created is open under the MIT License for further exploration and can serve as a foundation for new innovations and improvements.
Get Involved and Explore Further
We invite community members to explore our full research article and the CrazyPAD dataset. Together, we can drive forward the standards of UAV technology, ensuring that Crazyflie remains at the forefront of innovation and excellence.
Our research paper with a detailed description of this dataset:
Masalimov, K.; Muslimov, T.; Kozlov, E.; Munasypov, R.CrazyPAD: A Dataset for Assessing the Impact of Structural Defects on Nano-Quadcopter Performance. Data 2024, 9, 79. https://doi.org/10.3390/data9060079
We are eager to collaborate with the Crazyflie community and welcome any feedback or questions regarding our research. Let’s work together to push the boundaries of what’s possible in UAV technology.