Loco positioning system is still in Early access which means that things are moving fast. Since the release of the loco positioning system a Kalman filter has been contributed by Mike Hammer at ETH Zurich. The Kalman filter allows to calculate the position estimate in the Crazyflie and merges the Loco positioning system information with internal sensor to generate a much better estimate. We also worked on improving the anchor firmware, it is now ranging faster and we fixed a bug that was making the anchor hang sometime. Finally stephanbro on github pushed an improved position controller that improved the stability of flight a lot.
Because of all these changes we have decided to make a new video and to rewrite the documentation on the wiki a bit. Enjoy!
On the development side, we have extended the Loco Positioning system to position 2 concurrent Tags by using TDMA (Time Division Multiple Access) where each Tag is allocated a time slot to use to range to the anchors.
This works fine for a few Tags, but does not scale very well for a larger numbers of tags. If you want to experiment by yourself there is some instruction in the git commit. Be aware that this is still experimental enough for us to break it without warning so keep track of the git commits when you pull the latest version of the firmware. Currently we are working on a TDoA (Time Difference Of Arrival) mode that will scale to concurrently position virtually an infinite number of tags, hopefully you will soon be able to see commits on that on our Github projects.
The logging subsystem of the Crazyflie 2.0 is fairly flexible and easy to use, but despite its nice properties it may still be limiting in some scenarios. Two areas where it is lacking are offline- and high-speed logging. As a step towards solving these problems we are happy to announce support for micro SD-cards in the Crazyflie 2.0 firmware.
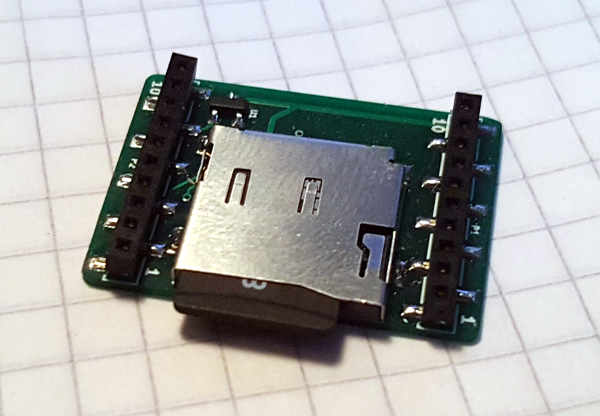
We have had a prototype for a micro SD-card expansion deck lying around in the office for a long time but have not had time to write any code for it. Finally we decided to go ahead an fix it and now there is a first basic version in the master branch of the firmware. What we have added so far is a driver for communicating with the deck and support for the FAT file system and that means that it is possible to read or write files to/from a SD-card. We have not yet implemented any means for configuring parameter logging to file but that is something we would like to do in the near future.
DIY
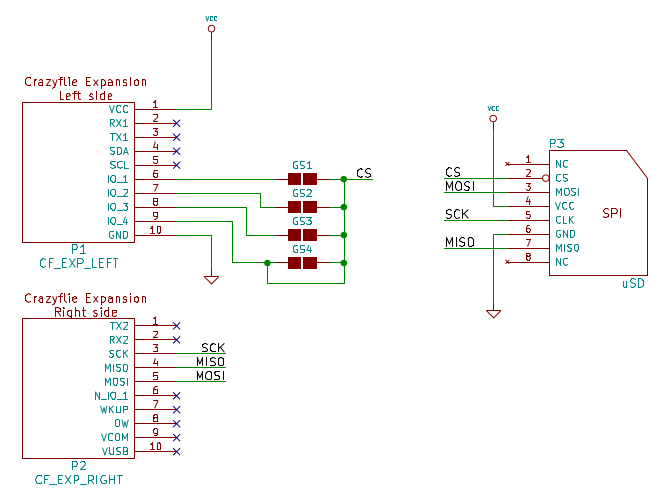
The hardware design for the expansion deck is very simple.
If you are eagerly waiting for this functionality it should not be too hard to create your own deck, otherwise we plan to release one sometime in the near future. We can not promise when, but if you need it please let us know as it might change our priorities when deciding what to do.
When the deck is installed all you have to do is build the firmware with
CFLAGS += -DDECK_FORCE=bcUSD
in the tools/make/config.mk file to enable the SD-card functionality and add your own code in src/deck/drivers/src/usddeck.c to read or write to your SD-card.
Until now, the Loco Positioning System have been limited to flying only one Crazyflie autonomously. In this post we will try to explain the reason of this limitation and what are the way forward.
The loco positioning system is based on Ultra Wide Band (UWB) radios that can very precisely measure the time of departure and arrival of a radio packet. This allows us to do two things:
Use these times directly to calculate the flight time of the radio packet. This is called time of arrival (ToA) measurement, it can be done by simply pinging one anchor. No extra synchronization is required.
Use the difference between the arrival of packets from two different anchors. This is called time difference of arrival (TDoA), it requires the system of anchors to be synchronized together.
The method 1) is simpler to implement since it does not require the anchor system to be synchronized, though it requires bidirectional communication between the tag (eg. Crazyflie) we want to locate and the anchors. It means that if you want to locate more than one tag you have to somehow share the air by not ranging all at the same time. The method 2) requires extra work to synchronize the system of anchor and is theoretically more sensitive to measurement noise. However TDoA measurements have a huge advantage: they can be made to work with unidirectional signal sent from the anchors. This means that the tag only has to listen to the air to receive all information needed to locate itself. This allows to scale the location system to as many tag as we want since adding a tag do not have to share the air, they are not transmitting anything.
So far we have been concentrating on ToA measurement since it could easily be implemented and gives us the best theoretical ranging performance. This allows to develop the algorithms to calculate position estimates and stabilize the autonomous flight. The problem is that, since we are just ranging as fast as possible with all the anchors of the system, one Crazyflie will take all the available air-time and we cannot fly another Crazyflie at the same time. We have just implemented a solution to fly more than one Crazyflie with ToA measurement using time-slots, this is called TDMA for Time Division Multiple Access, and it can be done without anchor code modification. We are working on the Maker Faire demo using this method and it is starting to work quite well:
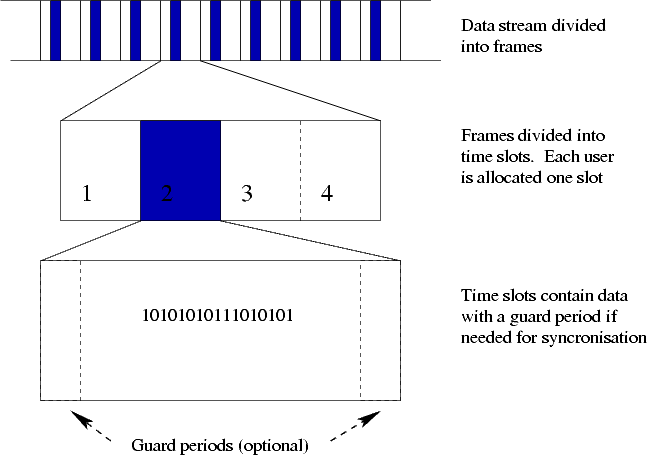
For TDMA we define frame and time slot. One time slot is a space in time where one tag will be allowed to communicate without risking collision with others. One frame is a group of timeslot. Each Crazyflie is configured to use one time slot in each frame.
TDMA frame structure. Image from the Wikipedia TDMA article.
Normally implementing TDMA would require some kind of synchronization to make sure each Crazyflie knows when its time slot starts. With the LPS we are in luck though since transmitting time is part of the way the ranging is working: we do not have to implement new messages or even to modify the anchors to implement TDMA.
We chose the timer in anchor 1 as our master clock for TDMA. When a Crazyflie starts it ranges with anchor 1 which allows to get the current time in anchor 1, then the start of the next frame can be calculated and the Crazyflie can schedule to range in its next time slot. We range with one anchor per time slot and each time we range with anchor 1 we get a chance to re-synchronize.
The TDMA has been pushed to the Crazyflie master branch. It is documented in the commit message so please feel free to test it, report, and pull-request ;-). We have tested running in 2 slots mode with success. Very quickly though, when adding more time slots, the performance deteriorates because the rate of ranging per Crazyflie decreases. Then TDoA will lead to better performance which is the next target, after the Maker Faire Berlin :-).
It’s been over six months since our last Crazyflie 1.0/2.0 firmware release and it was about time to do a new one. We have always had the idea to release often but can’t really say we have succeed. Something we are trying to improve but it has turned out to be really hard. Since it has been quite some time since the last release a lot of things have happens. To summarize the bigger ones:
There is now a Kalman filter option to use with the Loco Positioning system and hopefully later with other systems such as GPS and camera based systems (thanks to @mikehamer)
Improved altitude hold
Rewrites of low level code to improve stability
Architecture updated to support on-board position awareness
New streamlined I2C driver
Driver for Loco Positioning deck
CMSIS-DSP added to the firmware project
Improved PID tuning for the Crazyflie 2.0 (thanks to @theseankelly)
More reliable radio communication link
Please go to this page for instructions about how to upgrade to release 2016.09
ST Microelectronics have become quite known for their complex and somewhat buggy I2C peripheral, especially for their STM32F103 device (see errata). Where for instance the I2C interrupt priority needs to be the highest in the system, otherwise some I2C events might be lost which could cause random behavior. Since we use the STM32F103 for the Crazyflie 1.0 we have been using ST provided drivers as a solution for not having to take care of these cases. On the Crazyflie 2.0 we’re using the STM32F405 which doesn’t have the same I2C implementation and where ST has moved over to using the CPAL library for I2C drivers. This driver has turned out to be “bulky” and cause compatibility problems with our FreeRTOS due to handling of CPAL timeouts. Therefore we recently decided to see if we could write our own driver for the STM32F405 instead. How hard can it be..? Well after two weeks of pulling my hair and swearing it turned out to be a bit harder than we first thought. But now we hopefully have a slick and optimized I2C driver that works great for our purpose. Instead of polling it uses interrupts for I2C writing and DMA for I2C reading to keep MCU intervention low, leaving more processing power to Kalman filters etc :-).
Like I said, there was a few more obstacles along the way than we initially thought. So here are are some pointers I collected on the way:
I quickly dropped the interrupt event handling the ST-LIB suggest, I2C_GetLastEvent(…), because during the address event status register 2 (SR2) needs to be cleared (by reading it) after DMA has been setup (as noted in the datasheet when reading the fine print…). The I2C_GetLastEvent reads SR1 and SR2 at once which thus doesn’t work out.
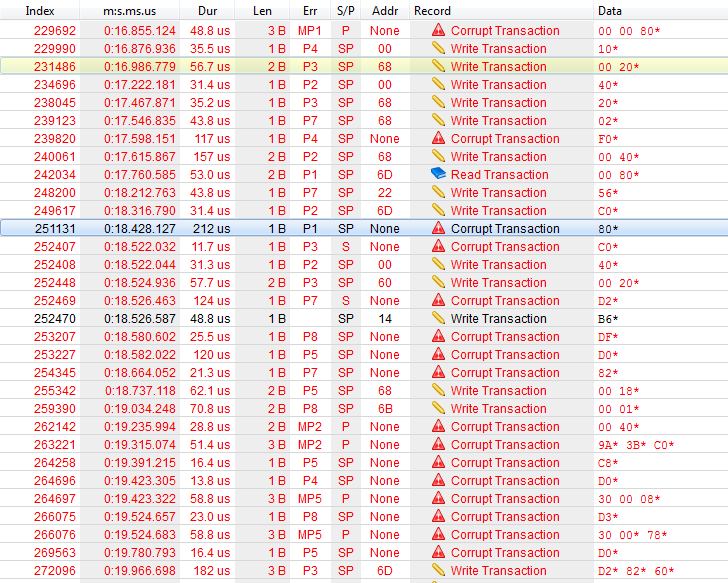
This took most time to find, but using my I2C analyser I found that the I2C connection suddenly stopped after a small period of time with a START then STOP event of 3.9us. Doing a lot of trial and error a eventually found that the only way to trigger such a quick start-stop condition was if both the start and stop flag in the control register where set at once. I therefore tried manipulating the CR1 register only with a write operation and not a read-modify-write which solved the problem. This requires that you know what the whole content of the register needs to be when setting it. Luckily such is the case. A very strange behaviour but now it’s working, let’s leve it at that :-)
And finally don’t always trust the tools. I found that using my TotalPhase Beagle I2C analyzer I sometimes got corrupt transactions. I tried a lot of things in my I2C driver but I didn’t get why. I posted a topic in the ST forum to get some desperately needed help but then one of my colleges suggested that I should try a different analyser. Well there was no problems with the I2C bus according to that analyser. Turned out that the problem was that I was using the Totalphase Data Center software in a virtual machine. I couldn’t get it to run natively on Ubuntu, which must have been causing slow USB communication or something that the Data Center software doesn’t handle correctly.
What’s better than a single Crazyflie? A swarm of them! Over a year ago our research group at the University of Southern California posted a blog post with the title “Towards CrazySwarms“, explaining how to fly six Crazyflies at the same time. Since then, we’ve expanded our fleet to 49 Crazyflies. It turns out that flying 49 requires a completely different approach. We will outline the additional challenges, and of course show a fun video!
Why is flying many Crazyflies hard? It comes down to two different categories:
Communication Limitations: The standard Crazyflie software does not support controlling more than one crazyflie per radio. Putting 49 radios on a PC is possible, but would cause very high latencies because the Universal Serial Bus (USB) operates, as the name suggests, serially in 1 ms intervals. Earlier, we showed that we can share a radio for two Crazyflies by using different addresses, but 25 radios are still too much to be handled on one PC reasonably. We can overcome this issue by reducing the amount of data to be transferred. However, this forces us to increase the autonomy of the Crazyflie. Instead of sending attitude control input for each Crazyflie at a high rate, we move the controller on-board and send high-level trajectory descriptions and external position information at a low-rate. In particular, we need to:
Move the position controller on-board, and
Be able to handle packet losses more gracefully.
i) is relatively easy, apart from the testing and tuning. For ii) we use an Extended Kalman Filter to estimate the state on-board. This state, consisting of the position, angle, and the translational velocities, is estimated by combining the on-board sensors (gyroscope, accelerometer) with external position information. Even if we are not able to send the external position for a while due to packet drops, the on-board sensors will keep the estimated state correct for a while.
Finally, we implemented broadcasts (rather than 1-to-1 communication between PC and each Crazyflie) and used a number of compression tricks in order to limit the required bandwidth further. We are able to broadcast the pose (position and rotation) for all 49 Crazyflies using just three Crazyradios 100 times per second. Each Crazyflie can handle several packet drops in a row before the state estimate becomes too unreliable to fly.
External Position Feedback: The on-board sensors of the Crazyflie are not sufficient to determine its position, so we need some external position feedback. In academia, optical motion capture systems are frequently used. They consist of a number of specialized, synchronized, high-speed infrared cameras. Each object to track is equipped with at least three retroreflective spheres (so-called markers), which reflect infrared light sent out by the IR light sources next to the cameras. If we know the pose of all cameras, we can use triangulation to determine the 3D positions of all retroreflective markers.Traditionally, motion capture systems require that each object has a unique arrangement of markers; this allows to determine each object’s position from a single frame of marker data by searching for its unique pattern. Unfortunately, the Crazyflie is too small to have 49 unique marker arrangements that can be reliably distinguished. To solve that issue, we put the Crazyflies at known positions initially and use their marker arrangement to track their position and pose over time, at 100 Hz. This allows us to use the same marker arrangement for each Crazyflie.
Putting that together (combined with an improved controller), allows us to create nice formations:
So what is next? Eventually, we will integrate our changes into the various projects (including the firmwares and the ROS driver), allowing everyone to work on and with CrazySwarms.
The loco positioning hardware is now manufactured and we are working hard on making it available. Loco positioning is still in early access, which means that we have tested the hardware but that the software still requires some love.
One of the big features still to implement is a position stabilization and position sensor fusion in the Crazyflie. This has been worked on from two fronts in the last weeks.
Community member jackemoore has been working hard on getting the Crazyflie 2.0 with a GPS deck working with position hold. He is getting close to having a GPS position hold working but has stumbled upon some system bugs that have to be solved first. You can follow, or even better help out, with the development on the forum post.
Crazyflie 2.0 with GPS deck
GPS location in the Crazyflie client
Mike Hamer, from ETH Zurich, has started to implement a Kalman filter, based on one of his publications, for the Crazyflie 2.0 firmware. This is still very much a work in progress but the initial results look promising. Mike has found and fixed a bunch of bugs on the way, which has greatly improved the firmware quality and stability. Since it is able to fuse the position estimate with the internal sensors, the Kalman filter will pair nicely with the GPS implementation from jackemoore to add a new layer of stability, as well as with the Loco positioning system. In addition, the Kalman filter is being written in such a way that it should be easy to incorporate additional sensors into the estimate. Keep your eyes open for a blog post in a couple of weeks with more detail on the Kalman filter’s inner workings, and hopefully a fully functional Kalman filter in the Crazyflie shortly thereafter :-).
While it is a central part of a quadcopter the core of the Crazyflie 2.0 had not moved since we released it. We deemed it to be good enough, it was flying and going fast after all.
Recently TheSeanKelly from the community did not hear it that way and started investigating the flight performance starting by the attitude control PID. The results so far are impressive!
Sean tuned the rate loop a lot, this is the loop responsible to control the angular rate of the Crazyflie in roll and pitch. Doing that and the attitude loop could be tweaked which we did a bit, the one responsible to control the absolute orientation of the copter. And the results is that two major issues with the flight performance seems to be greatly improved:
The take-off behavior: Crazyflie is currently not taking-off straight by itself. With the new settings this is fixed and at any thrust Crazyflie just goes straight up.
Attitude control: We had a lot of overshot in the attitude control. Basically it means that if you go forward 10 degrees and request 0 degree (level) the Crazyflie will overshoot with a negative angle causing it to stop. With the new tighter control if you ask +10degrees pitch the crazyflie accelerates and if you ask 0 it just stop accelerating. It will then continue at nearly constant speed. This is the “correct” behavior. This also means that the Crazyflie now reacts much more precisely and quickly to joystick controls.
We have tried to make a short video to show the new performance. Though the attitude control is really hard to show. We installed a test pilot on our Crazyflie that shows how much the new parameters helps in overall stability (I have tried to steer with old parameters as hard as I was steering with the new one). We also show more stability in pretty windy condition.
These new parameter have been pushed protected by an experimental flag. After more testing the official firmware will have much better flight performance out of the box :-).
As some of you might know, we are working full ahead on developing a local positioning system for the Crazyflie 2.0 ecosystem. There are many things to be done and we just took two major step by improving the stabilizer code architecture and moving the position control code into the firmware. Getting the position from an external system is fine and dandy, but we also have to control the pitch, roll and yaw of the Crazyflie to keep its desired position. Up til now we have been running this control algorithm outside the Crazyflie in an external computer, but now we have moved it into the Crazyflie itself. The controller is a simple PID controller and can definitely be improved, but the main purpose of the work has been to improve the architecture in this area. We know there are people in the community working on position related features and we hope the new architecture will make it easier for us all to implement the bits and pieces needed to get an autonomous Crazyflie. The estimation of the position has not been implemented in the firmware yet but the architecture now has support for it.
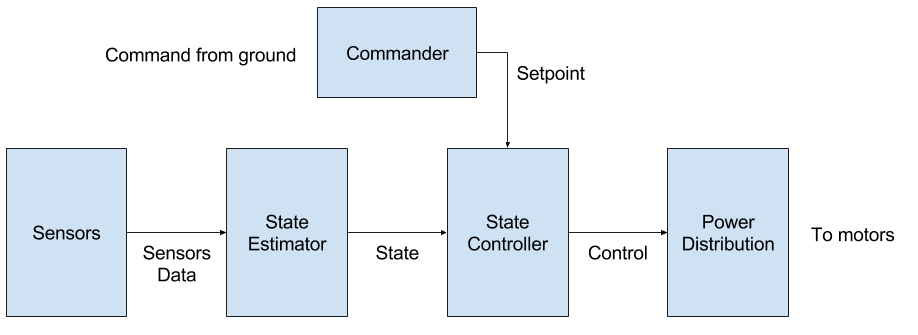
The general layout of the new architecture is as follow:
The sensors are gyroscope, accelerometer and pressure sensor. More could and will be added in the future like position and altitude measurement.
The state estimator calculate an as good as possible estimate of the Crazyflie state using the sensor values. The state contains the Crazyflie orientation (roll, pitch, yaw), its position and speed. Currently the state estimator has complementary filters for the orientation and the altitude. In the near future the full position will be estimated as well.
The commander generate a setpoint to be followed by the Crazyflie. Currently this is only done by receiving commander packet from the ground using Crazyradio or bluetooth low energy.
The state controller generates control output to achieve the requested setpoint from the current state.
Finally the power distribution is translating controls from the controller into driving the actual motors.
This is implemented in stabilizer.c and each block is implemented in there own file. Stabilizer.c used to be very verbose and complex to read and modify, it has now been greatly simplified and the above architecture is implemented in one short loop (see the full code in GitHub):
Our philosophy with this new architecture is to keep the code as simple as possible and to allow customisation at compile time. The high-level functions have as simple as possible interface and so can be exchanged easily. So if tomorrow, we have a shiny new controller we just have to compile it instead of the current PID controller. We think that this fits the way the Crazyflie is used, as a development tool.
This is just the beginning: there is still some more to clean-up in the functions and we will most certainly enhance the code from feedback. Please tell us if this is useful and how it can be enhanced even more.
Crazyflie 2.0 already has two mobile clients, one for Android maintained by Fred and the iPhone client. Now we officially have a new one on development: the Windows client.
Theseankelly, from the community, has started a Windows client for Crazyflie 2.0. It connects Crazyflie using bluetooth low energy and works both on phone and on PC running windows. Last week, he transferred the source code repos in the Bitcraze github so that it can have more visibility. We plan to eventually released it in the Windows store, but first it needs to have a little bit more features :-). To this end we have created a milestone on GitHub and have filled a couple of tasks. The plan is to get to a minimum set of functionalities. That for, we will focus on phone support first but if you are interested in PC support do not hesitate to say so and push tickets for it (gamepad support and configuration is the first thing I can think about for desktop support).
Last week Fred released a new version of the Android client. The outstanding new feature is a support of the LED and Buzzer decks when using Crazyradio! It means that you can now change the light effects and play sounds on the Crazyflie from the phone. This is even better because it means that the Android client code is now able to access the param subsystem and soon the log subsystem: this will allow for much more interactions in the future (like access to advanced Crazyflie settings and supporting more decks). The support of decks using BLE and more are on going so stay tuned and if you have any functionality request please head to the GitHub ticket tracker.