With the Swedish summer upon us, things are more calm at Bitcraze. The summer is usually a time for us to look a bit more at fixing infrastructure and other things that we do not have time to work on the rest of the year. One of the things I have been looking at improving lately is the state of our Python projects.
We currently use Python as the default language for everything we do on PC. This includes the Crazyflie lib, Client and other tools for our ecosystem. Over the years the state of the Python projects have greatly evolved. It started in ~2011 with almost no project management at all; just Python files. Then we switched to setup.py/pip support. Recently the Crazyflie client got the pyproject.toml treatment. Now that most Linux distributions prevent pip install-ing packages we need to juggle with venvs in order to use or develop in Python.
In essence, Python started with an easy to use language but has now become quite complex and hard to handle. Things become even more complicated when we take into account CI in Github actions that have to test that our projects actually work with all supported version of Python on Linux/Mac/Windows.
A bit of Rust (tooling) in our Python
As you might have gathered from our previous blog posts over the years, we like Rust quite a bit at Bitcraze and hope to use it more in our products moving forward. One of the great parts of Rust is the quality of the tooling and of the compiler feedback. Cargo as a project management tool helps a lot working with projects in a comfortable and repeatable way.
This is why we are now quite interested in using uv going forward as an official tool to work with the Bitcraze Python projects. uv can replace both venv and pip and makes working with a Python project as easy as working on a Rust one with cargo. It is also very fast and efficient since it is written in … Rust of course :-).
We are also looking at switching from Flake8 to Ruff and Ty for linting and type checking respectively. These two tools, from the same developer as uv are very fast and give very high quality error messages and warnings – this should make it much easier to maintain good code quality.
These changes would mostly be on our documentation and development side. The resulting projects are still compatible with pip and can still be used as they where used before. However we would make sure the projects can be efficiently used with uv.
Example
The Crazyflie client is currently already fully able to run with uv since it already uses the ‘new’ pyproject.toml project config file. So working with the project, from within the project folder, would look like that:
crazyflie-clients-python $ uv run cfclient # Run the Crazyflie client GUI
(...)
crazyflie-clients-python $ uv run ruff check # Check the code, runs in ~100ms!
All checks passed!
crazyflie-clients-python $ uv run pre-commit
Built cfclient @ file:///(...)/crazyflie-clients-python
Uninstalled 1 package in 0.97ms
░░░░░░░░░░░░░░░░░░░░ [0/1] Installing wheels...
Installed 1 package in 4ms
[WARNING] Unstaged files detected.
[INFO] Stashing unstaged files to /home/arnaud/.cache/pre-commit/patch1750684440-121836.
flake8...............................................(no files to check)Skipped
[INFO] Restored changes from /home/arnaud/.cache/pre-commit/patch1750684440-121836.Code language:Bash(bash)
This last command is a great example of the usefulness of uv: currently one need to install pre-commit on a virtual environment, enter it, and run pre-commit in the project. With uv is just works out of the box. In the back of course, pre-commit is installed in a virtual environment in the project folder. But this is all done automatically.
Finally we will also easily be able to test multiple versions of Python:
crazyflie-clients-python $ uv run --python 3.10 pre-commit
Using CPython 3.10.18 interpreter at: /home/linuxbrew/.linuxbrew/opt/python@3.10/bin/python3.10
Removed virtual environment at: .venv
Creating virtual environment at: .venv
Built cfclient @ file:///(...)/crazyflie-clients-python
Updated https://github.com/bitcraze/crazyflie-lib-python.git (3a35d22026c2ed8251b821e4f5b10e67091f811f)
Built cflib @ git+https://github.com/bitcraze/crazyflie-lib-python.git@3a35d22026c2ed8251b821e4f5b10e67091f811f
░░░░░░░░░░░░░░░░░░░░ [0/32] Installing wheels... warning: Failed to hardlink files; falling back to full copy. This may lead to degraded performance.
Installed 32 packages in699ms
[WARNING] Unstaged files detected.
[INFO] Stashing unstaged files to /home/arnaud/.cache/pre-commit/patch1750684632-123219.
[INFO] Installing environment for https://github.com/PyCQA/flake8.
[INFO] Once installed this environment will be reused.
[INFO] This may take a few minutes...
flake8...............................................(no files to check)Skipped
[INFO] Restored changes from /home/arnaud/.cache/pre-commit/patch1750684632-123219.Code language:JavaScript(javascript)
And, for the end user, uvx also simplify running the client:
$ uvx cfclient # Pulls and run cfclient from Pypi
(...)
$ uvx --from cfclient cfloader
Built cfclient
Installed 22 packages in 164ms
==============================
CrazyLoader Flash Utility
==============================
Usage: /(...)/.cache/uv/archive-v0/_OZwn5_zGeTE-qFoK_kEG/bin/cfloader [CRTP options] <action> [parameters]
The CRTP options are described above
Crazyload option:
info : Print the info of the bootloader and quit.
Will let the target in bootloader mode
reset : Reset the device in firmware mode
flash <file> [targets] : flash the <img> binary file from the first
possible page in flash and reset to firmware
mode.Code language:HTML, XML(xml)
This last command would likely be added to all our firmware Makefiles to be used when calling make cload to flash the Crazyflie.
Feedback?
This currently does seem like a good idea to us. If you have any feedback or ideas on how to handle Python projects in a better way we are very interested to hear them. Like I mentioned, the summer is kind of a ‘clean up’ time for us so this is when we have time to look at this kind of things.
For quite some time now we have had mobile apps that can be used to control the Crazyflie 2.x quadcopter. There is one iOS and one Android app available. There used to be a prototype of a Windows phone app but it has not survived the demise of Windows on phone (fun fact, the windows phone app can be compiled to run on XBox, however there is no USB access in there so it is quite useless). In this blog post I want to talk about the state of the apps and a possible future for them. As usual with me, the future should include a bit ot Rust :-).
Android app
The Android app is the oldest of the mobile apps, it has been created originally to be used with a Crazyradio conncted to an Android phone over USB. Then, when we released Crazyflie 2.0 with Bluetooth Low Energy, BLE was added to the app to be able to Connect to a Crazyflie without radio attached.
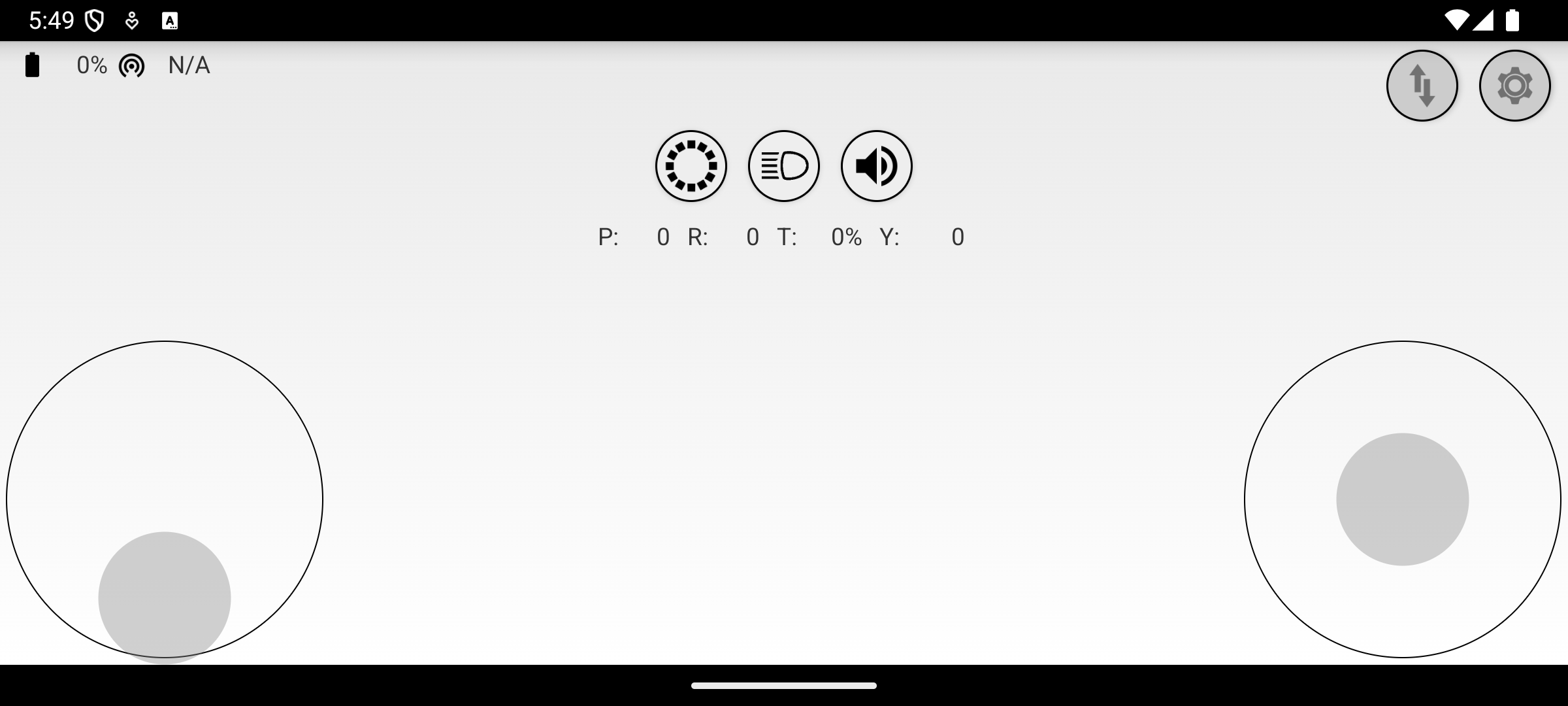
Over the years, the Android app has mainly been maintained by FredG, one of the very first Crazyflie contributors. The app supports controlling Crazyflie using touch-control as well as using an Android-supported Gamepad. It also has support for showing the Crazyflie console, controlling some decks and assisted flight using the flow deck.
It also supports updating the Crazyflie firmware using a Crazyradio connected on USB. This functionality is unfortunately broken since we altered the update process when changing the Crazyflie bluetooth stack last year.
The Android app is also working on Chromebook. This means that it can be used to fly the Crazyflie form a chromebook using Crazyradio of BLE. This is one of the only way to control the Crazyflie from Bluetooth on a laptop.
iOS app
The iOS app is newer and much simpler. It has had a couple of really good contribution over the years but overall it has seen much less development than the Android app. I have tried to keep it up and working but nothing more so far.
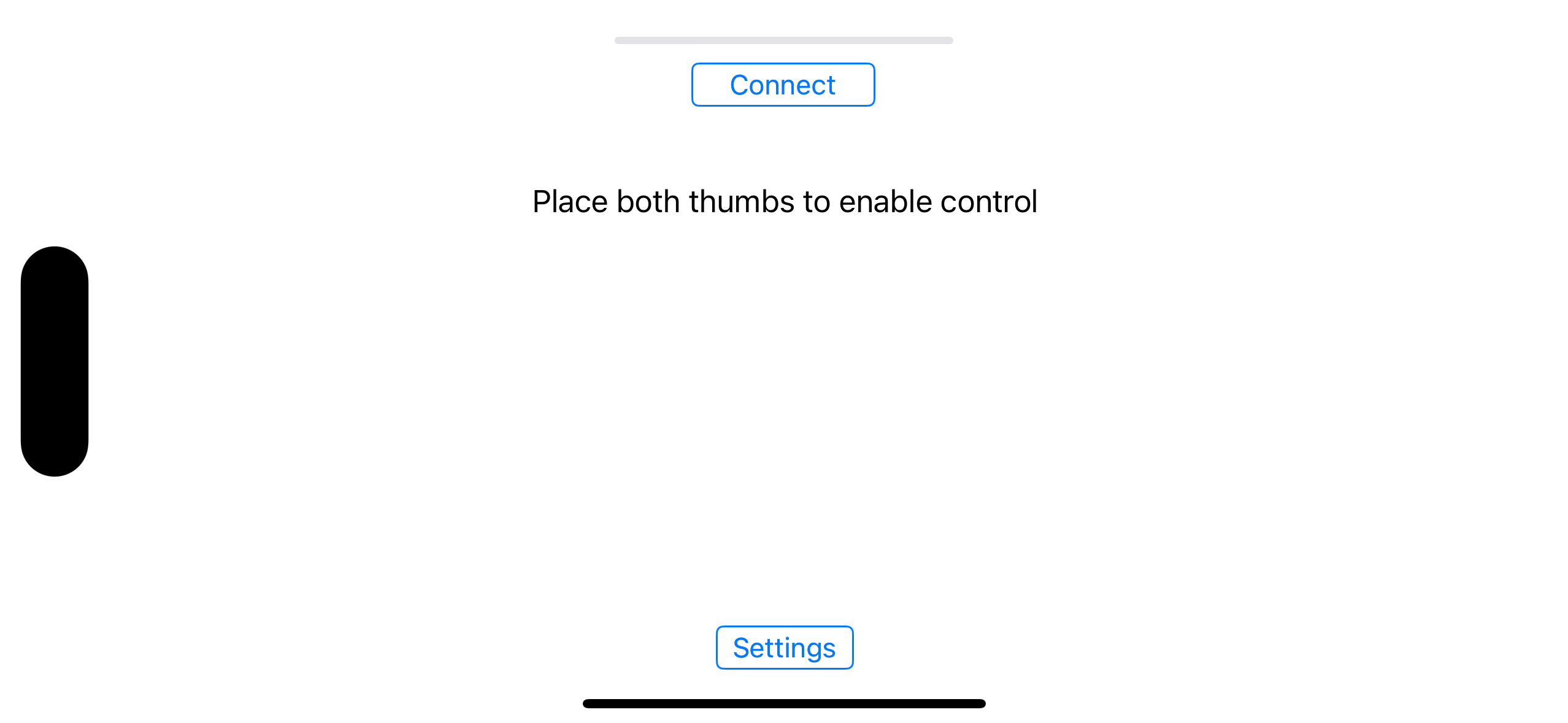
The iOS app was released when we made the Crazyflie 2.0. Since iOS does not let us communicate with USB devices, it can only work using Bluetooth Low Energy. It can control the Crazyflie using touch control as well as motion control using the IPhone gyroscope.
The iOS app also had support for updating the Crazyflie over Bluetooth, however, like for the Android app this is now broken and it has been removed in a recent release. I hope to be able to add it back soon.
With the advent of the Apple Silicon Mac, the iOS app is now also a Mac app. Like for the Android app on Chromebook, this gives the unique ability to communicate with the Crazyflie over Bluetooth from a computer. However it still has no USB support for Crazyradio and until we implement Gamepad support there is no way to control the Crazyflie from a Mac using the app.
The future
Some of the biggest issues for the development of the mobile app so far has been a lack of specification and the difficulty of re-implementing Crazyflie protocol for each app.
For the former, the apps have been created at a time where flying the Crazyflie manually was one of the major use-case. Nowadays, it is much more common to fly autonomously. This means that the apps should be able to do more to be really useful. Manual flight might still be needed to test the Crazyflie or just to play around. But the app could also have a much greater use for things like assisting in setting up positioning system or swarms. We are still not sure what would be needed or useful yet so if you have any ideas please tell us here as a comment or on Github discussions.
For the later, the difficulty of re-implementing the Crazyflie lib, this is something we have had problem with on multiple front. For example this is also a problem for ROS support and for Crazyswarm. The main problem is that the official Crazyflie lib is implemented in Python, and Python happens to not be a good choice for most cases due to limited portability and performance. One solution we have been imagining and working towards is to implement the Cazyflie lib in Rust and then implement binding for Python, C/C++, Java and Swift. This will cover our current python client, ROS, Crazyswarm as well as all the mobile app. It should allow to get much more done much more easily on mobile, since we will not have to start by re-implementing the wheel each time and will be able to focus on actual functionalities.
One idea, would be to start now with implementing the Crazyflie update algorithm in Rust and to use is from python and the mobile apps. This is a good first target, since this is a non-trivial really annoying piece of code in all languages, and it is also one that must be as bug-free as possible. So having a single implementation that is well tested and can be used everywhere would be very beneficial to the Crazyflie ecosystem.
I hope I managed to convey where we are and where we want to go with the mobile app. If you have any feedback please tell us about it.
There has been some extended work lately related to the Lighthouse positioning system. The goal of this work is to expand the maximum base station number to 16 enabling the system to cover larger areas and support more complex use cases.
Previous work
One previous attempt to enable multiple base stations using the current lighthouse deck left us with a highly untested “hacky” solution. After flashing the Crazyflie with the proper firmware, this solution requires to strategically position the base stations so that no more than 4 are visible at any given time. Then, the geometry estimation that is normally carried out by the cfclient has to be done through the multi_bs_geometry_estimation.py script in the cflib.
Last year we developed a prototype deck, used in last year’s holiday video, that had a bigger FPGA to receive the lighthouse signals and an esp32 to be able to decode and filter most of the lighthouse pulses onboard the deck. This approach ended up not working for us since it still included the moderately-hard-to-develop FPGA and the algorithm we implemented in the esp32 to identify lighthouse V2 pulses happened to be not fast enough to handle enough base stations.
Current limitations
A key factor that currently limits the maximum number of usable base stations is the Lighthouse deck which can’t handle more than 4 visible base stations at a time. Additionally, the Crazyflie’s STM32 is doing all the filtering and 16 base stations generate so much data that it would exceed the compute and memory budget we have in the Crazyflie. This was one of the main reasons to add a MCU in the deck of our last-year prototype.
Ongoing progress
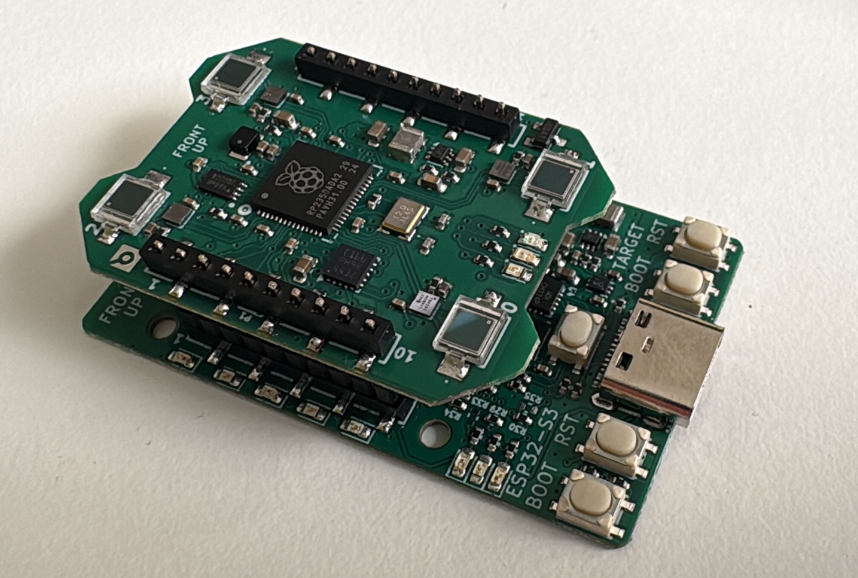
The last couple of months we have redesigned a new LH-16 deck containing a RP2350 microcontroller so that part of the computation and filtering can take place on the deck, rather than on the Crazyflie. With a deck like this, it should be possible to receive large amounts of data from the base stations and filter some of it out to finally estimate the Crazyflie’s position in the Crazyflie’s STM32.
This deck has been designed to run a firmware developed by Said Alvarado-Marin from the AIO team at Inria in Paris. This firmware is able to acquire, decode and identify the FM1-encoded LFSR data stream we get from the base stations without the help of an FPGA or a big look-up table. This allows to greatly simplify the hardware and software by using only one microcontroller on the deck.
We are currently bringing-up the prototype and hope to be able to soon fly in our lab with 16 base stations. We will also be looking at making a standalone lighthouse receiver for other robots and applications. For the curious: the board under the deck in the picture in a debug board that contains everything we might need for making a standalone receiver plus everything needed to bring-up and debug the deck until we have it ready to fly.
We’re happy to announce that release 2025.02 is now available. This update includes fixes and improvements for the Crazyflie 2.1 Brushless, along with stability enhancements for the AI-deck.
The Crazyflie 2.1 Brushless with propeller guards on a prototype charging padThe optimized brushless motor
Finalizing the integration of the Crazyflie 2.1 Brushless into our software ecosystem and expanding its documentation were key steps in preparing for its launch. These efforts ensure compatibility, improve the user experience, and make the platform more accessible to the community. We’re looking forward to a smooth launch and to seeing how the community will utilize the new platform!
This year, we introduced updates to the Crazyflie 2.1 kit, making the 47-17 propellers the new default and including an improved battery. These upgrades enhance flight performance and endurance, culminating in the release of the Crazyflie 2.1+—an optimized iteration of our established platform.
And don’t forget the developer meetings, where we shared some more behind the scenes information and collected invaluable feedback from the community.
We also released a new edition of our research compilation video, showcasing some of the coolest projects from 2023 and 2024 that highlight the versatility and impact of the Crazyflie platform in research.
Team
In the past year, Bitcraze saw significant changes within the team. in February, Rik rejoined the team. Tove started at Bitcraze in April. Mandy, with whom we’ve already worked extensively over the years, joined as our production representative in Shenzen. At the end of the year, we said goodbye to Kimberly, whose contributions will be deeply missed. Additionally, we had Björn with us for a few months, working on his master’s thesis on fault detection, and Joe continued his industrial postdoc at Bitcraze that began in December 2023. Looking ahead, Bitcraze is hiring for two new roles: a Technical Sales Lead and a Technical Success Engineer, to support our ongoing projects and customer collaborations.
Midsummer lunch with the teamChristmas-themed Bitcraze office
As we close the chapter on 2024, we’re proud of the progress we’ve made, the connections we’ve strengthened, and the milestones we’ve reached. With exciting launches, new faces on the team, and continued collaboration with our community, we’re ready to soar to even greater heights in 2025. Thank you for being part of our journey!
We are excited to announce that we are working on several new link performance metrics for the Crazyflie that will simplify the troubleshooting of communication issues. Until now, users have had access to very limited information about communication links, relying primarily on a “link quality” statistic based on packet retries (when we have to re-send data) and an RSSI channel scan. Our nightly tests have been limited to basic bandwidth and latency testing. With this update, we aim to expose richer data that not only enables users to make more informed decisions regarding communication links but also enhances the effectiveness of our nightly testing process. In this blog post, we will explore the new metrics, the rationale behind their introduction, and how they will improve your interaction with the Crazyflie. Additionally, we will be holding a developer meeting on Wednesday November 13th to discuss these updates in more detail, and we encourage you to join us!
“Link Quality”—All or Nothing
Until now, users of the Crazyflie have had access to a single link quality metric. Implemented in the Python library, this metric is based on packet retries—instances when data packets need to be re-sent due to communication issues. This metric indicates that for every retry, the link quality drops by 10%, with a maximum of 3 retries allowed. As a result, the link quality score usually ranges from 70% to 100%, with a drop to 0% when communication is completely lost. However, as packet loss occurs, users often experience a steep decline, commonly seeing 100% when packets are successfully acknowledged or dropping to 0% when communication is completely lost.
Client representation of link quality; no link, yes link
The current link quality metric has served as a basic indicator but provides limited insight, often making it difficult to gauge communication reliability accurately. Recognizing these limitations, we’re introducing several new link performance metrics to the Crazyflie Python library, designed to provide a far more detailed and actionable view of communication performance.
What’s Coming in the Upcoming Update
The first metric we are adding is latency. We measure the full link latency, capturing the round-trip time through the library, to the Crazyflie, and back. This latency measurement is link-independent, meaning it applies to both radio and USB connections. The latency metric exposed to users will reflect the 95th percentile—a commonly used measure for capturing typical latency under normal conditions.
Next are several metrics that (currently) only support the radio link. For these, we distinguish between uplink (from the radio to the Crazyflie) and downlink (from the Crazyflie to the radio).
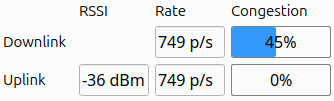
The first is packet rate, which simply measures the number of packets sent and received per second.
More interestingly, we are introducing a link congestion metric. Whenever there is no data to send, both the radio and the Crazyflie send “null” packets. By calculating the ratio of null packets to the total packets sent or received, we can estimate congestion. This is particularly useful for users who rely heavily on logging parameters or, for example, stream mocap positioning data to the Crazyflie.
The Received Signal Strength Indicator (RSSI) measures the quality of signal reception. Unlike our current “link quality” metric, we hope that a poor RSSI will serve as an early warning signal for potential communication loss. While RSSI tracking has been possible before with the channel scan example, this update will monitor RSSI in the library by default, and expose it to the user. The nRF firmware will also be updated to report RSSI by default. Currently, we only receive uplink RSSI, that is, RSSI measured on the Crazyflie side.
Work in progress client representation of new link performance metrics
We’ve already found these new metrics invaluable at Bitcraze. While we have, of course, measured various parameters throughout development, it was easy to lose track of the precise status of the communication stack. In the past, we relied more on general impressions of performance, but with these new metrics, we’ve gained a clearer picture. They’ve already shed light on areas like swarm latency, helping us fine-tune and understand performance far better than before.
You can follow progress on GitHub, and we invite you to try out these metrics for yourself. If there’s anything you feel is missing, or if you have feedback on what would make these tools even more helpful, we’d love to hear from you. Hit us up over on GitHub or join the developer meeting on Wednesday the 13th of November (see the join information on discussions).
We are happy to announce that release 2024.10 is now available! Special thanks to our community contributors for their valuable input and code contributions in this release!
As you might expect, we use the Crazyflie python client a lot at Bitcraze. The client has a lot of features, ranging from setting up LPS/Lighthouse systems to turning on/off the headlight LEDs on the LED-ring deck. But some of the features we use the most is probably the console view as well as the logging/parameter subsystems. A lot of the time we modify firmware, flash it and want to tweak (via parameters) or to check if the changes are working as expected (via the console or logging). Then switching from the terminal, where we build/flash, to the Qt UI in the Crazyflie python client can be a hassle if you just want to do something quick. It would be great to be able to log/set variables directly from the terminal, well now you can!
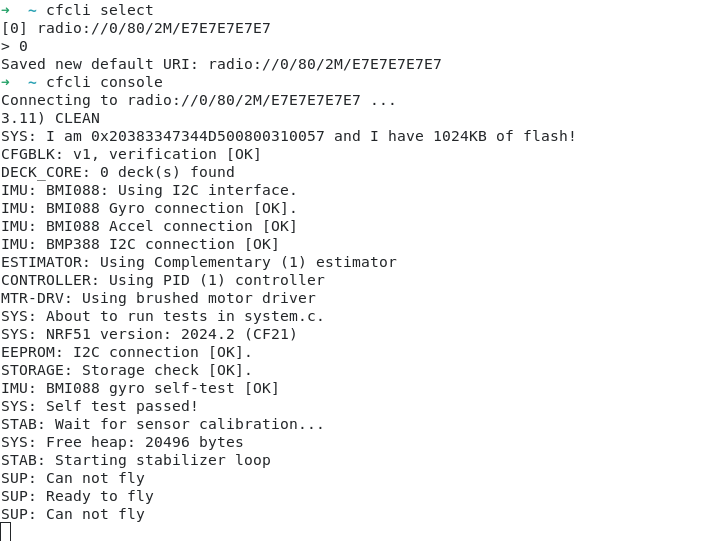
Meet the Crazyflie command-line client, a fun Friday project I worked on a while back. The CLI is written in Rust and was made possible thanks to a previous fun Friday project by Arnaud on the Rust Crazyflie link/lib, which has now moved to the official Bitcraze repositories. The CLI project is still very limited, but has some basic functionality:
Scan for Crazyflies and pre-select one to interact with
List loggable variables, create log configurations and print their value
List parameters and get/set them
Show the Crazyflie console
Last week the first version, v0.1.0, was released on crates.io. So if you have Rust set up on your computer and want to test it out then all you need to do is to type “cargo install cfcli“. The CLI still only has some basic functionality, but hopefully it can be expanded in the future with more useful things! Feel free to leave any issues or comments you might have on the Github page.
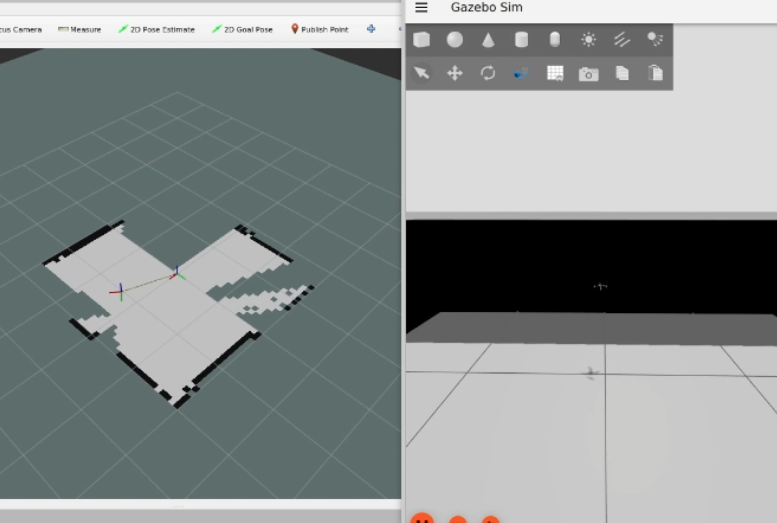
You might remember that at the beginning of this summer, we were invited to do a skill-learning session with the Crazyflie at the Robotics Developer Day 2024 (see this blog post) organized by The Construct. We showed the Crazyflie flying with the multi-ranger deck, capable of mapping the room in both simulation and the real world. Moreover, we demonstrated this with both manual control and autonomous wall-following. Since then, we wanted to make some improvements to the simulation. We now present an updated tutorial on how to do all of this yourself on your own machine.
Note: This tutorial was originally developed for a demonstration at Robotics Developer Day 2024. As the integration depends on specific versions of ROS 2, Gazebo, and related packages, it may require adjustments to work with current software. This post is no longer actively maintained by the Bitcraze team.
This tutorial will focus on using the multi-ranger ROS 2 nodes for both mapping and wall-following in simulation first, before trying it out on the real thing. You will be able to tune settings to your specific environment in simulation first and then use exactly the same nodes in the real world. That is one of the main strengths of ROS, providing you with that flexibility.
We have made a video of what to expect of the tutorial, for which you should use this blogpost for the more detailed instructions.
Watch this video first and then again with the instructions below
What do you need first?
You’ll need to setup some things first on the PC and acquire hardware to follow this tutorial in full:
Gazebo Harmonic – Install via these instructions This is not the recommended Gazebo for humble but we will install the specific ROS bridge for this later. Just make sure that you don’t have gazebo classic installed on your machine.
Hardware
You’ll need to components at least of the STEM ranging bundle
If you have any different setup of your computer or positioning system, it is okay as the demos should be simple enough to work, but, be prepared for some warning/error handling that this tutorial might have not covered.
Time to complete:
This is an approximation of how much time you need to complete this tutorial, depended on your skill level, but if you already have experience with both ROS 2/Gazebo and the Crazyflie it should take 1 hour.
If you have the Crazyflie for the first time, it would probably be a good idea to go through the getting started tutorial and connect to it with a CFclient with the Flowdeck and Multi-ranger deck attached as a sanity check if everything is working before jumping into ROS 2 and Gazebo.
Go to the ros2_ws workspace and build the packages
cd ~/crazyflie_mapping_demo/ros2_ws/
source /opt/ros/humble/setup.bash
colcon build --cmake-args -DBUILD_TESTING=ONCode language:JavaScript(javascript)
Building will take a few minutes. Especially Crazyswarm2 will show a lot of warnings and std_err, but unless the package build has ‘failed’, just ignore it for now until we have proposed a fix to that repository.
If the build of all the packages passes and non failed, please continue to the next step!
2. Simple mapping simulation
This section will explain how to create a simple 2D map of your environment using the multi-ranger. The ROS 2 package designed for this is specifically made for the multi-ranger, but it should be compatible with NAV2 if you’d like. However, for now, we’ll focus on a simple version without any localization inferred from the map.
Open up a terminal which needs to be sourced for both the gazebo model and the newly build ROS 2 packages:
If you get a ‘No such file or directory’ error on the model, try entering the full path in GZ_SIM_RESOURCE_PATH export.
Gazebo will start with the Crazyflie in the center. You can get a close-up of the Crazyflie by right-clicking it in the Entity tree and pressing ‘Move to’. You can also choose to follow it, but the camera tracking feature of Gazebo needs some tuning to track something as small as the Crazyflie. Additionally, you will see RVIZ starting with the map view and transforms preconfigured.
Open up another terminal, source the installed ROS 2 distro and open up the ROS 2 teleop keyboard node:
source /opt/ros/humble/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
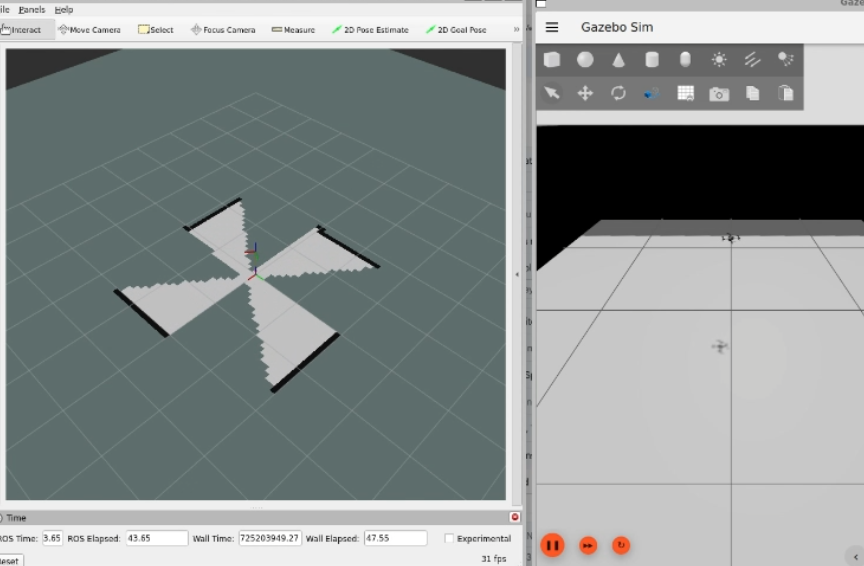
Have the Crazyflie take off with ‘t’ on your keyboard, and rotate it around with the teleop instructions. In RVIZ you should see the map being created and the transform of the Crazyflie moving. You should be able to see this picture, and in this part of the video.
Screenshot of the Crazyflie in Gazebo generating a map with Teleop (video)
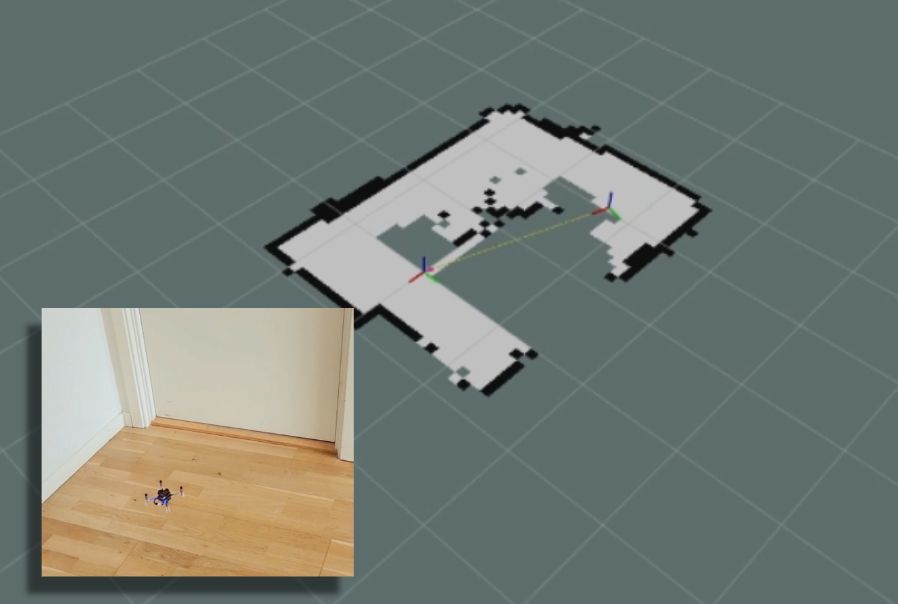
3. Simple mapping real world
Now that you got the gist of it, let’s move to the real Crazyflie!
First, if you have a different URI of the Crazyflie to connect to, first change the config file ‘crazyflie_real_crazyswarm2.yaml’ in the crazyflie_ros2_repository. This is a file that Crazyswarm2 uses to know to which Crazyflie to connect to.
Open up the config file in gedit or your favorite IDE like visual code:
and change the URI on this line specifically to the URI of your Crazyflie if necessary. Mind that you need to rebuild ros2_ws again to make sure that this has an effect.
Now source the terminal with the installed ROS 2 packages and the Gazebo model, and launch the ROS launch of the simple mapper example for the real world Crazyflie.
Now open up another terminal, source ROS 2 and open up teleop:
source /opt/ros/humble/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
Same thing, have the Crazyflie take off with ‘t’, and control it with the instructions.
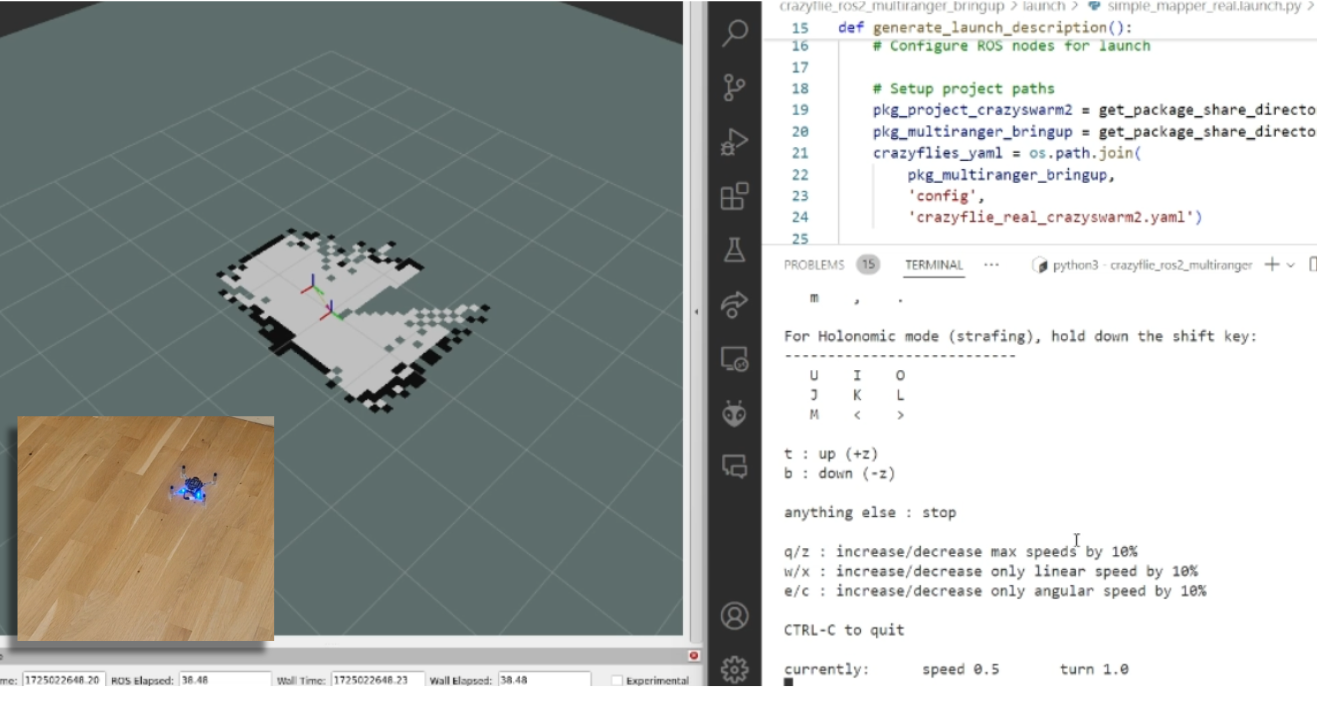
You should be able to see this on your screen, which you can also check with this part of the video.
Screen shot of the real Crazyflie mapping while being controlled with ROS 2 teleop (video)
Make the Crazyflie land again with ‘b’, and now you can close the ROS 2 node in the launch terminal with ctrl + c.
4. Wall following simulation
Previously, you needed to control the Crazyflie yourself to create the map, but what if you could let the Crazyflie do it on its own? The `crazyflie_ros2_multiranger` package includes a `crazyflie_ros2_multiranger_wall_following` node that uses laser ranges from the multi-ranger to perform autonomous wall-following. Then, you can just sit back and relax while the map is created for you!
Let’s first try it in simulation, so open up a terminal and source it if you haven’t already (see section of the Simple mapper simulation). Then launch the wall follower ROS 2 launch file:
Take off and wall following will go fully automatic. The simulated Crazyflie in Gazebo will fly forward, stop when it sees a wall with it’s forward range sensor and follow the wall on its left-hand side.
You’ll see on RVIZ2 when the full map is created like here below and this part of the tutorial video.
Screenshot of the simulated Crazyflie in Gazebo mapping will autonomously wall following (video)
You can stop the simulated Crazyflie by the following service call in another terminal that is sourced with ROS 2 humble.
ros2 service call /crazyflie/stop_wall_following std_srvs/srv/Trigger
The simulated Crazyflie will stop wall following and land. You can also just close the simulation, since nothing can happen here.
5. Wall following real world
Now that we have demonstrated that the wall-following works in simulation, we feel confident enough to try it in the real world this time! Make sure you have a fully charged battery, place the Crazyflie on the floor facing the direction you’d like the positive x-axis to be (which is also where it will fly first), and turn it on.
Make sure that you are flying with a room with clear defined walls and corners, or make something with cardboard such as a mini maze, but the current algorithm is optimized to just fly in a squarish room.
Source the ROS 2 workspace like previously and start up the wall follower launch file for the
Like the simulated Crazyflie, the real Crazyflie will take off automatically and automatically do wall following, so it is important that it is flying towards a wall. It should look like this screenshot, or you can check it with this part of the video.
The real crazyflie wall following autonomously while mapping the room (video).
Be careful here to not accidently run this script with the Crazyflie sitting on your desk!
If you’d like the Crazyflie to stop, don’t stop theROS2 nodes with ctrl-c, since it will continue flying until crash. It’s not like simulation unfortunately where you can close the environment and nothing will happen. Instead, use the ROS 2 service made for this in a different terminal:
ros2 service call /crazyflie_real/stop_wall_following std_srvs/srv/Trigger
Similar the real Crazyflie will stop wall following and land. Now you can close the ROS 2 terminals and turn off the crazyflie.
Next steps?
We don’t have any more demos to show but we can give you a list of suggestions of what you could try next! You could for instance have multiple Crazyflies mapping together like in the video shown here:
This uses the mapMergeForMultiRobotMapping-ROS2 external project, which is combined with Crazyswarm2 with this launch file gist. Just keep in mind that, currently, it would be better to use a global positioning system here, such as the Lighthouse positioning system used in the video. Also, if you’d like to try this out in simulation, you’ll need to ensure different namespaces for the Crazyflies, which the current simulation setup may not fully support.
Another idea is to connect the NAV2 stack instead of the simple mapper. There exists a couple of instructions on the Crazyswarm2 ROS2 tutorials so you can use those as reference. Check out the video below here.
Moreover, if you are having difficulties setting up your computer, I’d like to remind you that the skill-learning session we conducted for Robotics Developer Day was entirely done using a ROSject provided by The Construct, which also allows direct connection with the Crazyflie. The only requirement is that you can run Crazyswarm2 on your local machine, but that should be feasible. See the video of the original Robotics Developer Day skill-learning session here:
The last thing to know is that the ROS 2 nodes in this tutorial are running ‘offboard,’ so not on the Crazyflies themselves. However, do check out the Micro-ROS examples for the Crazyflie by Eprosima whenever you have the time and would like to challenge yourself with embedded development.
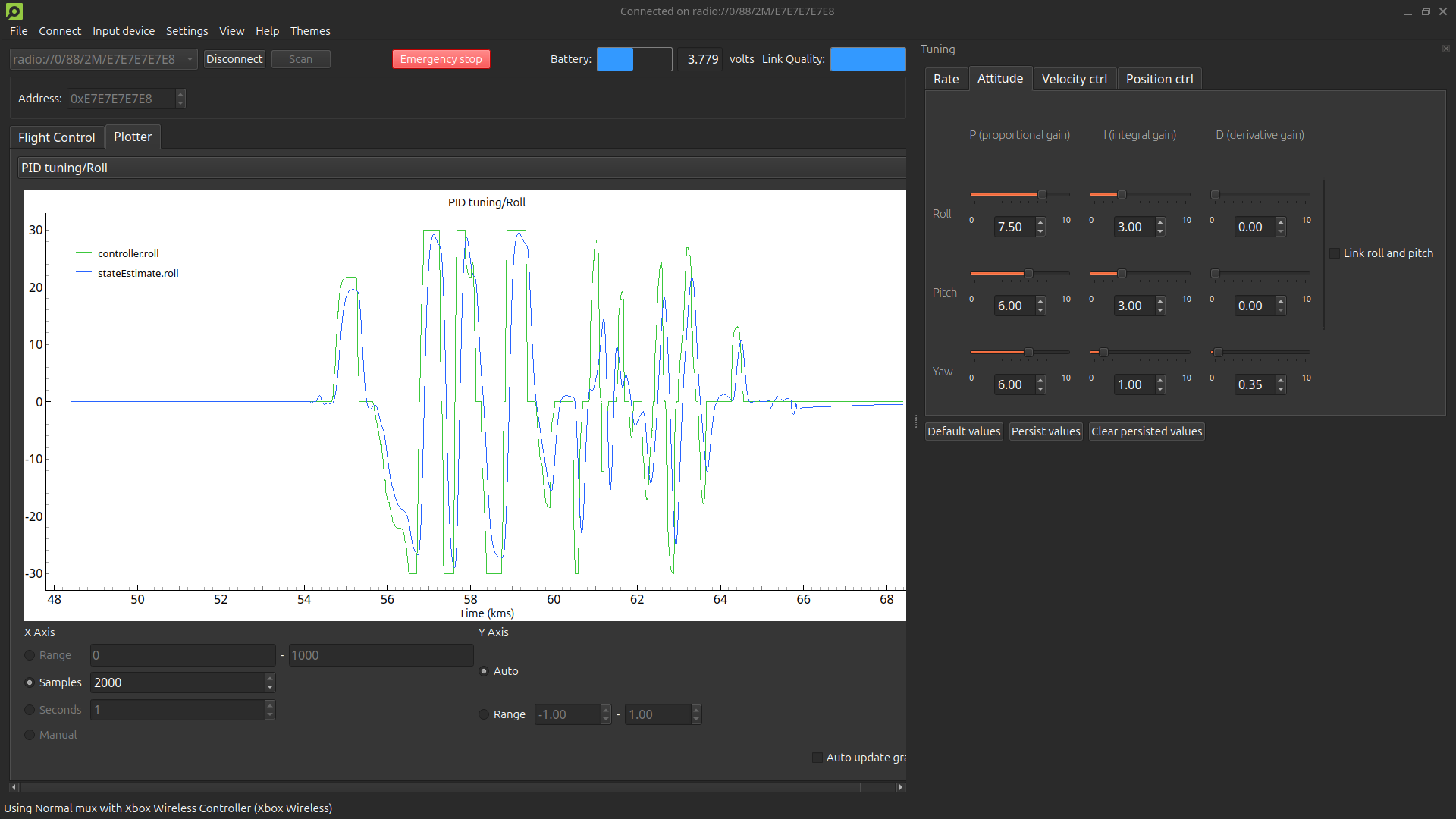
We are excited to announce the release of our new PID Tuning Guide! This guide is designed to help users understand and apply the basics of PID tuning within our ecosystem, making it easier to achieve stable and responsive flight for your Crazyflie. This guide is particularly useful if you’ve modified your drone, such as adding expansion decks or changing its motor and/or propeller configuration. While our default tuning is designed to work in a wide range of situations and configurations, fine-tuning your PID settings can enhance performance for your specific setup and flight profile.
Interface with tuning toolbox and plotter displaying the roll angle setpoint and the roll angle state estimate.
What’s in the guide?
The guide covers essential topics, including:
Fundamental PID Concepts: Understand the role of Proportional, Integral, and Derivative parameters in controlling your Crazyflie’s movements.
Step-by-Step Instructions: Learn how to set up your software, and use cfclient for tuning.
Practical Tuning Tips: Get insights on adjusting PID gains, using the tuning toolbox, and conducting safe manual flight tests.
Why this guide is useful
Even though this guide focuses on the basics, it provides a solid foundation for anyone new to PID tuning. Whether you’re using the Crazyflie 2.1, Crazyflie 2.0, or a custom-built quadcopter with the Crazyflie Bolt, this guide will help you:
Understand how PID controllers work and why they are important.
Use the cfclient for PID tuning within our ecosystem.
Safety first
We prioritize safety in our guide. Always secure your quadcopter in a safe environment, use protective gear, and configure an emergency stop on your controller to ensure a safe tuning process.
Get started with PID tuning today!
Ready to improve your quadcopter’s flight performance? Check out our PID Tuning Guide and start tuning.