The PULP lab has done many amazing research on the field of Edge ML and were one of the collaborators in the development of the AI-deck of which their work on the Pulp Shield was the main inspiration. For more information check out their guest blogpost and be sure to read their latest work on the AI-deck!
More over, they have been working on an opensource tools that also work on the GAP8chip which are must try-outs for any AI-deck users
DORY: Deployment ORiented to memorY (Github, Paper)
NEMO: NEural Minimizer for pytOrch (Github, Paper)
All in all, since they clearly know what they are talking about, they are more than qualified to teach the rest of us how to work with all this! Also check out Luca Benini’s keynote at RISC-V or this week at the TinyML summit if you would like to learn more about PULP!
Date and content Workshop
The workshop will be tailored to those that have just started to to work with the AI-deck however, we think it will be interesting for regular users as well. Note that the tools mentioned above will not be handled this time.
These are the topics that will be discussed:
Hardware explanation (Gap8 specifics and AIdeck)
Software Preliminaries (GapSDK,, VM)
Hands-on examples
The workshop will take approximately 2 hours and will be on 16th of April in the afternoon, but the exact specifics will be given at a later date. So make sure to already block it in your calendar and to sign up for more information!
One crucial aspect of any research and development is to record and analyze data, which then can be used for quantifying performance, debugging strange behavior, or guide us in our decision making. We have been trying to improve the way that this is done to help all of you researcher out there with their work, so this blog post will explain an alternative, better, method to record whatever is happening on the Crazyflie in real-time.
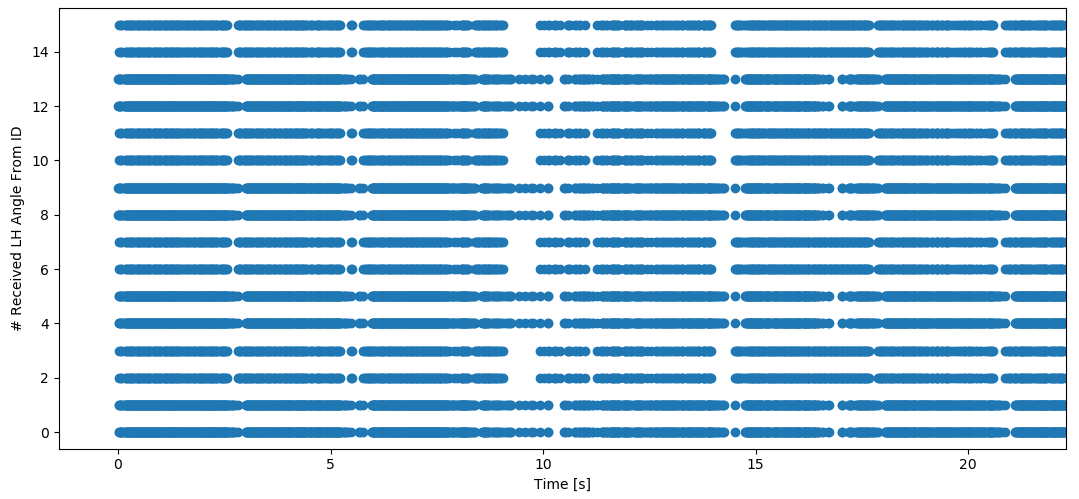
Example data collection of received Lighthouse angles over time. The y-axis contains a unique measurement ID (16 in total for 4 sensors * 2 basestations * 2 sweeps/basestation). Thus, each dot represents the time when a certain kind of measurement was received. We do not receive all angles in fixed intervals, because of the interference between basestations.
Existing Logging Approaches
So far there have been two principle ways of recording data with the Crazyflie:
Logging: In the firmware, one can define global variables that can be streamed out at a fixed frequency, using logging configurations. Variables have a name and data type, and the list of all available variables can be queried from the firmware.
Debug Prints: It is possible to add DEBUG_PRINT(…) in any place that contains a string and possibly some variables. These are asynchronous, but not timestamped, so they are mostly useful to notify the user of some status change.
Both approaches have multiple backends. The logging variables can be streamed over USB, via the Crazyradio, or on a Micro-SD-card using a specialized deck. When using the radio or USB, the frequency is limited to 100 Hz and only a few variables can be streamed at this speed due to bandwidth limitations. The Micro-SD-card deck, on the other hand, allows to log a lot more logging variables at speeds up to 1 kHz, making it possible to access high-speed sensor information, e.g., the IMU data. The Debug Prints can be used over the radio or USB, or with a SEGGER J-Link and a Debug Adapter, over J-Link Real-Time Transfer (RTT). The former is very bandwidth limited, while the latter requires a physical wire connection, making it impossible to use while flying.
New Approach: Event-Based Logging
Event-based logging combines the advantages of the existing approaches and offers a third alternative to record data. Similar to debug prints, a user can trigger an event anywhere in the code and include some mandatory variables that describe this event (so-called payload). Similar to logging, these events are timestamped and have fewer bandwidth limitations. Currently, there is just one backend for the Micro-SD-card deck, but it would be possible to add support for radio and USB as well.
One of our first test cases of the event-based logging is to analyze the data we get from the Lighthouse deck. Here, we trigger an event whenever we received a raw sweep. This allows us to visually see the interference that happens between two LH2 basestations. We also use the event-based logging for time synchronization of the Crazyflie and a motion capture system: when we enable the IR LEDs on the active marker deck, we record an event that contains the Crazyflie timestamp. On the PC side, we record a PC timestamp when the motion capture system first detects the IR LEDs. Clock drifts can be computed by using the same logging mechanism when the IR LEDs are turned off.
Adding event-based logging had some other good side effects as well: the logging is now generally much faster, there is more user feedback about the correct buffer size usage, and the binary files are smaller. More details are in the documentation.
Future Work
We are working on adding event triggers to the state estimator. This will enable us to record all the sensor information during real flights with different positioning systems, so that we can tune and improve the Kalman state estimator. It will also be interesting to add support for events in CRTP, so that it can be used over USB and radio.
Communicating with your Crazyflie is an important pillar for its operation. As more robots are controlled, the reliability of this communication link becomes more and more important, as the probability that there is no failure at any of the Crazyflies decreases exponentially with the number of robots. We have written about the low-level radio link before. Today, we focus on past, on-going, and future improvements to make the communication more reliable.
Reliability Challenges
As part of doing research with the Crazyswarm, I noticed several issues:
Sometimes commands do not seem to arrive at the Crazyflie, especially when using unicast (i.e., direct) communication with a specific Crazyflie.
Sending ‘too much’ data while the Crazyflie is flying can cause catastrophic crashes. One example is trying to upload a trajectory, while flying in a motion capture space. However, this occasionally even happens if just trying to update a parameter.
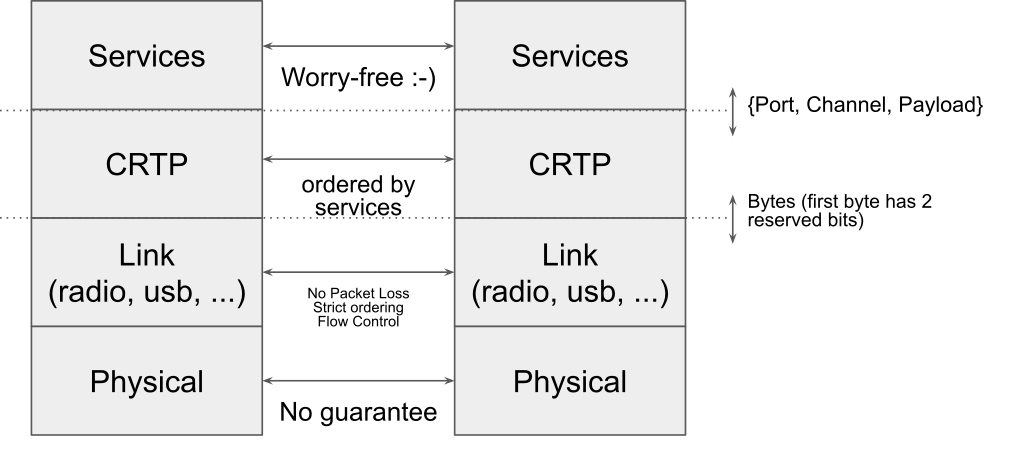
The radio link has a feature called Safelink, which essentially guarantees that packets are send and received in order and no packet gets dropped. This feature never worked reliably in the crazyflie_cpp implementation and is therefore not used in the Crazyswarm. However, it is the default mode for cflib. The Crazy RealTime Protocol (CRTP) also has the notion of different communication ports in order to prioritize important messages such as control commands over less important ones such as trajectory upload. However, this prioritization was never implemented in any of the clients.
Native Link Implementations
Another, non reliability related, issue always was that the performance of cflib is not stellar when connected to many Crazyflies. This is mostly because (C)Python has a Global Interpreter Lock (GIL), which prevents true multi-threaded operation. A common solution to allow true parallelism is multiprocessing or implementations in a language that compiles to machine code (native code).
Crazyflie-link-Cpp
The first native implementation is written in C++ and includes Python bindings using pybind11. The overall API is simple: A connection can be created given a URI, and data can be send and received. Internally, this library implements Safelink to guarantee packets are in order, uses priority queues to prioritize messages on important CRTP ports, and handles all multi-radio and multi-thread related synchronization issues. Unlike prior implementations, the bandwidth is shared uniformly between all connections, i.e., there is no race between different Crazyflies communicating over the same radio. We measured a 50% lower CPU utilization when connecting with the CF client, a 20% higher bandwidth, and a 20% lower latency compared to the pure Python implementation.
For now, this feature is experimental and needs to be enabled using an environment variable. If you want to give it a try, you can use
pip install cflinkcpp
USE_CFLINK=cpp cfclient
once everything is merged to master in the next couple of days.
Crazyflie-link-rs
The second native implementation is written in Rust. As it turns out, writing multi-threaded code in C++ is very difficult and error-prone, because it is up to the user to use the various synchronization primitives correctly. Rust, on the other hand, provides extensive compile-time checks to increase reliability by design. This implementation does not have quite as many features as the C++ version yet and requires a bit more work to be used with the client but it is going to be worked-on on Fridays. The goal is to reach functional parity with the other link implementations and be able to use the rust-implemented link with “USE_CFLINK=rs cfclient” in the future.
Future Work
As part of the development process, we also wrote many system tests that verify correctness and measure performance of the various link implementations. We already found and fixed several firmware bugs (681 and 688). The major open issue is that there is no flow control on the system link (the connection between the NRF51 and the STM32), which still causes packet loss in some cases.
Since the middle of January, Bitcraze has had two additional guests: us! We, Josefine & Max, are currently doing our master thesis at Bitcraze during our final semester at LTH.
Unfortunately, the pandemic means remote working which could have caused some difficulties with hardware and equipment accessibility. Fortunately, for us, our goal with the thesis is to emulate the Crazyflie 2.1 hardware in the open source software Renode. We can therefore do the work at home.
Since this is the first time either of us have tried to emulate hardware it is exciting to see if it will even be possible, especially as we do not know what limitations Renode might have. Thus far, four weeks in, there have been some hiccups and crashes but also progress and success. One example was when we got the USART up and running and it became possible to start printing debug messages and another was when the LED lights were connected and it was possible to see when they were turned on and off.
Example of output from partially implemented hardware.
If all goes well, the emulated hardware could be used as a part of the CI pipeline to automatically hunt for bugs. Academically, it would be used to further study testing methods of control firmware.
Getting a glimpse into the workings at Bitcraze and the lovely people working here has been most interesting and we are looking forward to the time ahead. Until next time, hopefully with a working emulation, Josefine & Max.
The lithium polymer battery we use, as with basically all rechargeable batteries, suffers from degradation. That means that when using it, and as time goes by, its energy capacity as well as performance will degrade. The performance, which is very related to the batteries internal resistance, will result in that the Crazyflie will not be able to produce the same maximum thrust and it will not be able to carry as much payload. The loss of capacity is due to ageing and charge cycles, results in that the flight time will decrease. A common solution to monitor the degradation is to have a BMS, or Battery Management System, that constantly monitors the battery health. For the small type of battery that is used in the Crazyflie, this is not yet viable, but maybe there is something we can do to test part of the battery health anyway?
Theory
Since the internal resistance will result in a larger voltage drop during load we can exploit this property and measure it. We will however not only measure the batteries internal resistance but the resistance of the complete power path as a result of the components we have at hand on the Crazyflie.
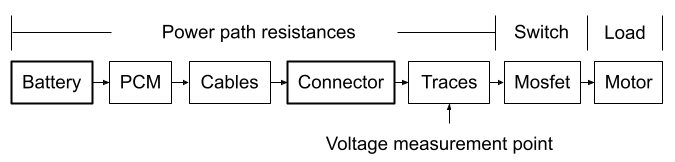
Power path block diagram
So what we do is to activate the switch (mosfet) so the load (motor) will pull power from the battery. The power drawn will result in a voltage drop compared to a no-load situation, which we can measure and compare to a healthy setup. Since the measurement point is at the PCB traces, any of the components before that point can be causing the voltage drop, however the battery and connector are most likely of doing so as they are most prone to ageing.
Implementation
The load is achieved by, for a very short time, activate the motors at full thrust. We don’t want the Crazyflie to fly away as that would be a bit unhandy. Before activating the motors we measure the idle voltage and during load we measure the minimum voltage so we can calculate the voltage drop. This is pretty easy to do, the problem is to find a good level where we can distinguish a good battery from bad battery. Therefore this feature is pretty experimental. We tested many batteries and good batteries tend to yield a voltage drop between 0.60V – 0.85V while bad batteries go above 1.0V. Therefore the current threshold is set to 0.95V but it would be good to have more data so if you use this feature please give us feedback if the level is wrong. The testing was run on a “stock” setup with the standard battery, propeller and motors, and it is for these the level is set. A different setup will probably not work well and needs a different threshold. Also keep in mind that the connector can also be a “bad” guy as oxide can build up and result in a higher resistance. Often this can be solved with some e.g. WD-40 solvent or un-connecting/connecting the connector several times.
Usage
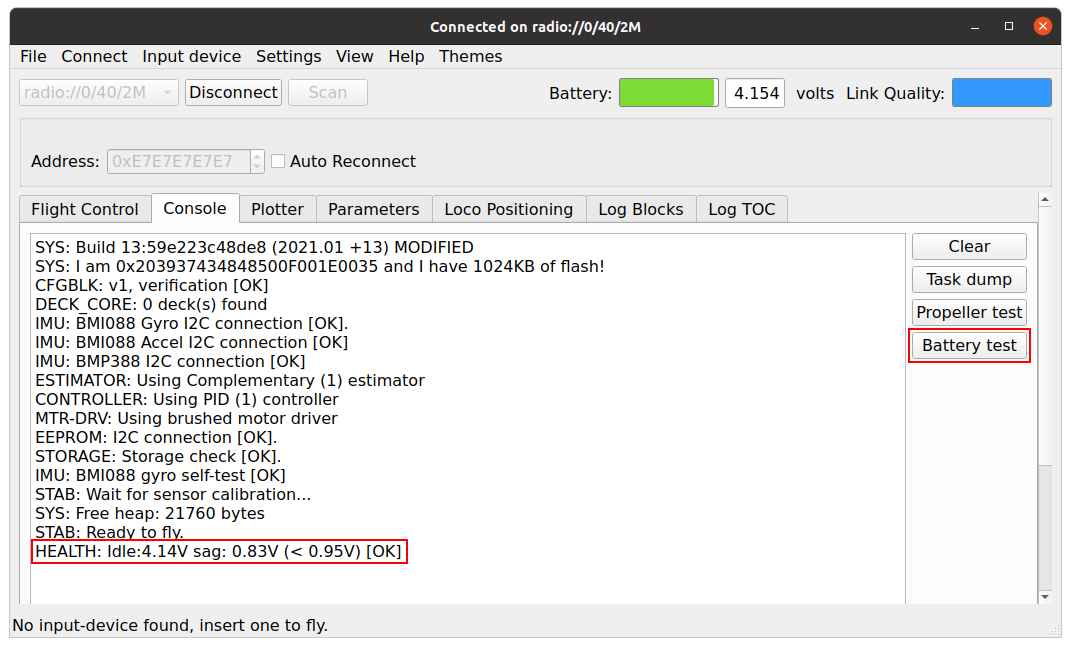
This is not in the 2021.01 release so one would have to run the latest on the master branch on both the crazyflie-firmware and the Crazyfie-clients-python. The simplest way to test this feature is to launch the cflient, connect to the Crazyflie, open the console tab and press the battery test button.
cfclient console tab after running battery test
When pressing the button the propellers will shortly spin and there will be an output in the console as highlighted in red. If the sag value is below 0.95V it will yield [OK] and if it is above it will say [FAIL].
A probably more useful use case is to test this automatically before taking of with e.g. a swarm. This can be done by setting the parameter health.startBatTest to 1 and after around 0.5s readout the result in the log variable health.batteryPass to check that it is set to 1. The health.batterySag log variable will contain the latest sag (voltage drop) measurement. Hopefully this experimental feature will be a good way of increasing reliability of flights.
Most of the improvements have been done in the Crazyflie firmware and include:
The App API in the Crazyflie firmware has been extended and improved to be able to handle a wider range of applications. The goal is to enable a majority of users to implement the functionality they need in an app instead of hacking into the firmware it self.
We have improved the Lighthouse support in the firmware and both V1 and V2 are now working well. Even-though everything is not finished yet, we have taken a good step towards official Lighthouse positioning.
A collision avoidance module has kindly been contributed by the Crazyswarm team.
A persistant storage module has been added to enable data to be persisted and available after the Crazyflie is power cycled. It will initially be used to store Lighthouse system information, but will be useful for many other tasks in the future.
Basic arming functionality has been added for platforms using brushless motors.
In the client the LPS tab now has a 3D visualization of the positioning system and a new tab has been added to show the python log output.
Unfortunately we have run into some problems for the Windows client build which is not available for this release.
Finally we have fixed bugs and worked to improve the general stability.
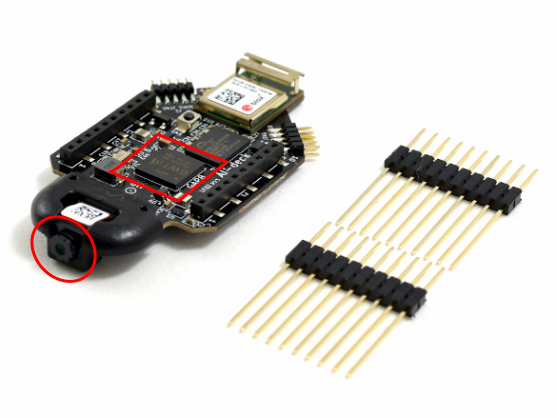
It has been a while since we have done an update on the AI-deck! However, as announced in the New Year post, we do have some important changes coming up for the next batch of production. These changes include updated version of the GAP8 chip and switching to a gray-scale camera. We will call this version the AI-deck 1.1, but its firmware should be compatible with the previous version. Currently we don’t have a clear time-line of when we will receive the next batch but it will be soon.
Newer version of GAP8
Together with our collaborators at Greenwaves technologies, we decided to update the GAP8 chip to the latest version available. Since this required a microchip change on the product and to prevent any confusion, we decided to call this version the AIdeck 1.1.
The new version of the GAP8 chip includes several improvements, which resolves 1. conflict problem between uart and hyperbus and 2. Cluster DMA when doing the data transfer between L2 and L1 Memory. The last issue is considered a corner case will only occur if the AI-deck 1.0 is pushed to its limit with a large deep neural network. Although we expect that both issues will not affect the current users if you are experiencing any related problems with the previous version (AI-deck 1.0), please send us an email to contact@bitcraze.io.
Gray-scale Camera
In July we have given an update where we discussed the color camera and how to process it on the GAP8 chip. Even though at the first we were pretty optimistic on the possibilities with the camera, after discussing with the community, ETH zurich and Greenwaves T., we have decided to switch back to a gray-scale camera.
This is because most examples in the gap_sdk repo mostly assume a gray-scale camera. And even though the color camera would be good for image processing with anything of color, it is less ideal for neural networks on edge machine learning devices.
For those who committed themselves to the color camera module, do not worry! We are planning to still offer the color camera module as a separate product in our store! Also we will have a limited amount of grayscale cameras available for those who are unhappy with their AI-decks 1.0’s color camera.
Firmware, Docs and Examples
Since the AI-deck is still in early release, have all the code and documentation in this github repository. This contains all the start-up guides and keeps track of all the bugs and fixes. Some months ago, we managed to update all of this to the latest GAP SDK (3.8.1), which fixed the streamer issues we are having.
However, the quickest way on how to improve this Early Release product is to get feedback by its users. So if you are having any problems at all, do not hesitate to ask a question on to forum or to open up a issue in the repository!
Storage is one of these very simple functionality that actually ends up being quite hard to implement properly. It is also one of these functionality that is never acutely needed, it is possible to hack around it, so it gets pushed to be implemented later. Later is now, we have now implemented a generic persistent storage subsystem in the Crazyflie.
In Crazyflie 1.0, we originally stored settings in a setting block in flash and required the bootloader to change the settings. When designing Crazyflie 2.0 we added an I2C EEPROM to make it easier to store settings, though until now we only stored a fix config block very similar to the one stored in the Crazyflie 1 and that only contained basic radio settings and tuning. This implementation is hard to evolve since the data structure is fixed in one point of the code.
What is now implemented is a generic key-buffer database stored in the I2C EEPROM. From the API user point of view, it is now possible to store, retrieve and delete a buffer using a string as a key. This allows any subsystem, or apps, in the Crazyflie to easily store and retrieve their own config blocks. There is 7KB of space available for storage in the EEPROM.
The first user of this new storage subsystem is the Lighthouse driver. The storage is used to store lighthouse basestation geometries and calibration data, this allows to configure a Crazyflie for a system/lab and have it running out of the box even after a restart.
A future use-case would be to implement stored-parameters: we have been thinking about implementing optional persistence for the parameters for a long time. This would allow to modify and then store new default values for any parameters already present in the Crazyflie. This would allow to very easily implement things like custom controller tuning in a quad made from a bolt for example.
At low level, we where hopping to be able to find a ready-to-use library or file system to store data in our small EEPROM, but unfortunately we did not find anything that would fit our needs. We then had to implement our own storage format.
The low level structure is documented in the Crazyflie firmware repos. Basically the data are stored as a table of “length-key-value” entries with a possibility for an entry to he a “hole”. When new buffers are added they are added at the end of the table and when they are deleted they are replaced by a hole. When the end of the table is reached, the table is de-fragmented by removing the holes and moving the data as much as possible to the beginning of the memory. This structure works very well for an EEPROM and could even be adapted to work well on FLASH.
New CI
When we started activating continuous integration/automatic build to our GitHub repos we did so using Travis CI for firmware builds and AppVeyor for windows builds. However, the GitHub CI offering, GitHub actions, has become quite complete lately and now supports Linux, Windows as well as MacOS builds.
We have now transitioned to GitHub actions for all our repos and we will also implement most of the release process using GitHub actions as well. This will hopefully streamline the release process and allow us to release new version of our projects more often.
With the raging pandemic in the world, 2021 will most likely not be an ordinary year. Not that any year in the Bitcraze universe has been boring and without excitement so far, but it is unusually hard to make predictions about 2021. Any how, we will try to outline what we see in the crystal ball for the coming year.
Products
What products are cooking in the Bitcraze pot and what tasty new gadgets can we look forward to this year?
Lighthouse
We did hope that we would be able to release the first official version of the Lighthouse system in 2020, but unfortunately we did not make it. It has turned out to be more complex than anticipated but we do think we are fairly close now and that it will be finished soonish, including support for lighthouse V2.
Once the official version has been achieved, we are planning to assemble an full lighthouse bundle, which includes everything you need to start flying in the lighthouse positioning system. This will also include the Basestations V2 as developed by Valve corporation, so stay tuned!
New platforms and improvements
We released the AI-deck last year in early release, but the AIdeck will be soon upgraded with the latest version of the GAP8 chip. For most users this will not change much but for those that really push the deep learning to the edge will be quite happy with this improvement. More over, we are planning to by standard equipped the gray-scale camera instead of the RGB Bayer filter version, due to feedback of the community. We are still planning to offer the color camera on the side as a separate product for those that do value the color information for their application.
Also we noticed the released of several upgraded versions of sensors for the decks that we already are offering today. Pixart and ST have released a new TOF and motion sensor so we will start experimenting with those soon which hopefully lead to a new Multiranger or Flowdeck. Also we are aware of the new DWM3000 chip which would be a nice upgrade to the LPS system, so we will start exploring that as well, however we are not sure if we will be able to release the new version of LPS in 2021 already.
One of the field that we have wanted to improve for a while but have not gotten to so far is the communication with the Crazyflie. The Crazyradio is using a quite old chip and the communication protocol has hardly been touched in years. There now exists a much more powerful nRF52 radio chip with USB port so it can give us the opportunity to make a new Crazyradio and, at the same time, rework the communication protocols to make them more reliable, easier to use and to expand.
People and Collaborations
Last year we have started several collaborations with show drone orientated business, which we are definitely moving forward with in 2021. For shows stability and performance is very important so with the feedback of those that work with that on a regular basis will be crucial for the further development and reliability of our products.
Moreover we would like to continue our close collaboration with researchers at institutes and universities, to help them out with achieving their goals and contribute their work to our opensource firmware and software. Here we want to encourage the community to make their contributions easy to use by others, therefore increasing the reproducibility of the implementations, which is a crucial aspect of research. Also we are planning to have more of our online tutorial like the one we had in November.
We also will be working with closely together with one of our very active community members, Wolfgang Hönig! He has done a lot of great work for the Crazyswarm project from his time at University of Southern California (USC) and has spend the last few years at Caltech. He will be working together with us for a couple of months in the spring so we will be very happy to have him. Moreover, we will also have 2 master students from LTH working with us on the topic hardware simulation in the spring. We are making sure that we can all work together in the current situation, either sparsely at the office or fully online.
In 2021, we will also keep our eyes open for new potential Bitcrazers! We believe that everybody can add her/his own unique addition to the team and therefore it is important for us to keep growing and get new/fresh ideas or approaches to our problem. Usually we would meet new people at conferences but we will try new virtual ways to get to know our community and hopefully will meet somebody that can enhance our crazy group.
Working from home
Due to the pandemic we are currently mainly working from home and from the looks of it, this will continue a while. Even though we think we have managed to find a way to work remotely that is fairly efficient, it is still not at the same level as meeting in real-life, so there is always room for improvement. Further more the lack of access to electronics lab, flight lab and other facilities when working from home, does not speed work up. We will try to do our best though under the current circumstances and are looking forward to an awesome 2021!
2020 was not an ordinary year, and through its different roller coaster motions, we’re proud of what we’ve accomplished. As 2021 grows nearer, it’s time to look back at this year and appreciate our accomplishments.
Community
The Crazyflie is still gaining a lot of interests in universities, and we’re always happy to discover what awesome things our users are doing with our products. One of our proudest moment was that a paper published in Science magazine used a Crazyflie in their research framework!
We actually made a montage of the different research videos where the Crazyflie, and we feel blessed to be part of those amazing feats. We were also quite surprised to see how the Crazyflie is implemented in different fields. Here is the video if you want to know more:
We’ve had stellar blogposts from guests this year, that you can read if you missed:
Of course, “community” this year means something different. We were sorry to not participate in the conventions and fairs where we usually meet a lot of interesting people, and had to find ways to do things differently. We now have a Discord server where people can join and discuss all things Bitcraze related!
Hardware
In the beginning of the year, we started right by releasing the Active Marker deck. Thanks to our collaboration with Qualisys, this new motion capture sensor can estimate the full body pose of the Crazyflie without unique marker positions or known starting positions.
A great deal of work was dedicated to the release of the AI deck in early access. Thanks to our newest deck, super-edge-computing is now possible on your Crazyflie !
Software
We improved our app API. We have seen it used more and more. Being able to add code to the Crazyflie without having to fork the code has proven to be quite useful and popular.
At the beginning of the year we finally managed to decode and use the Lighthouse V2 signals in order to get the Crazyflie to fly autonomously using lighthouse V2 basestations. Our focus for the end of year was to improve the Lighthouse V2, and thanks to some hard work, we managed to improve the calibration compensation for the newest version of Valve’s base station.
The client got a new facelift, as well as the python lib, and we released no less than 4 different new releases.
Documentation
We tried as much as we can to improve our documentation, and working from home proved how much it is needed. Kimberly wrote some step-by-step guides that help you discover more hands-on how to use our python library and the motion commander.
We also tried a new way to connect with you, while improving our existing tutorials, by having an online tutorial. It proved quite successful and it was a great way to talk about all the possibilities (and difficulties!) of a swarm.
The way we work
The biggest change was, as many of you, to learn to work from home. We managed quite well, learning to adapt our process. We now are experts in flying at home, and even though our flying arena is deserted, our kitchens are now more alive than ever.