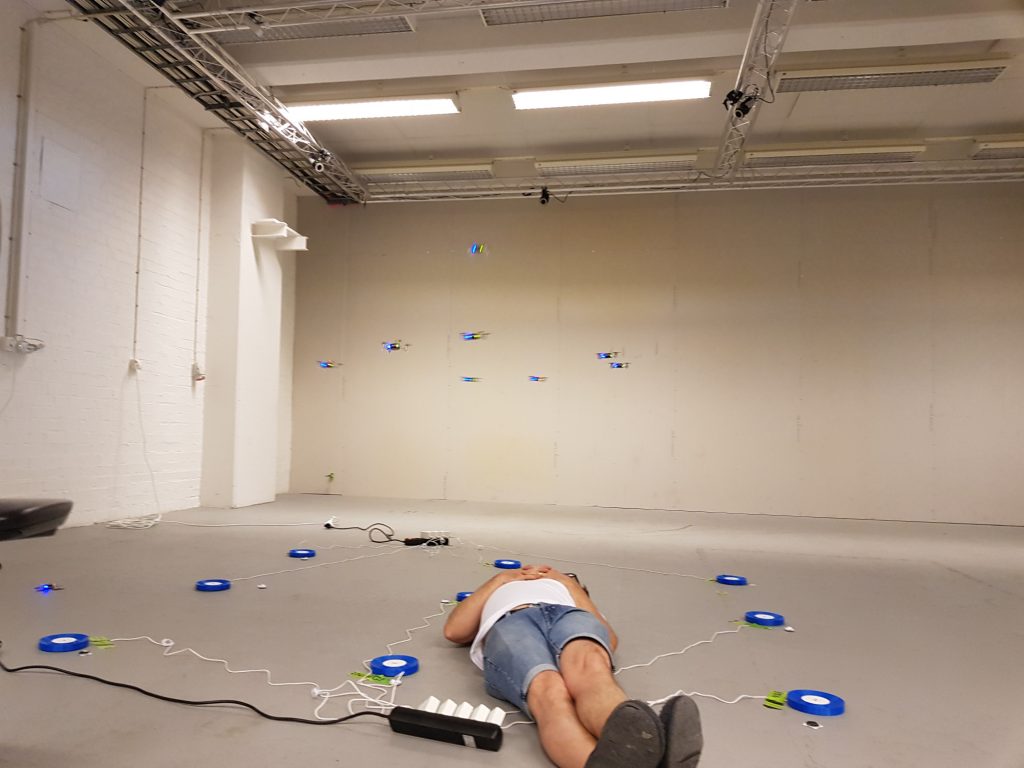
We have recently moved to a new bigger office. With the summer arriving in Sweden, it was time to organize a small move-in after-work party with friends and family. For the occasion we wanted to play around with a small swarm of Crazyflies and the new Lighthouse positioning. Time being a sparse resource, we setup the ICRA2019 demo in the flight lab so that we would be able to fly during the party. We also started looking at our old swarm show that we ran with the LPS a year ago to see if we could run it with Lighthouse:
The show was a essentially a sequence of setpoints sent from a python script and controlling 9 Crazyflies 2.1 equipped with Lighthouse deck on the top and led-ring deck on the bottom synchronized on music. We setup the Crazyflie in the Lighthouse positioning system and converted the script to use the high-level-commander GOTO setpoints. We look forward at trying more advance control problems like trajectories to make more impressive synchronized flight choreography in the future but for now it already look quite good even with only GOTOs:
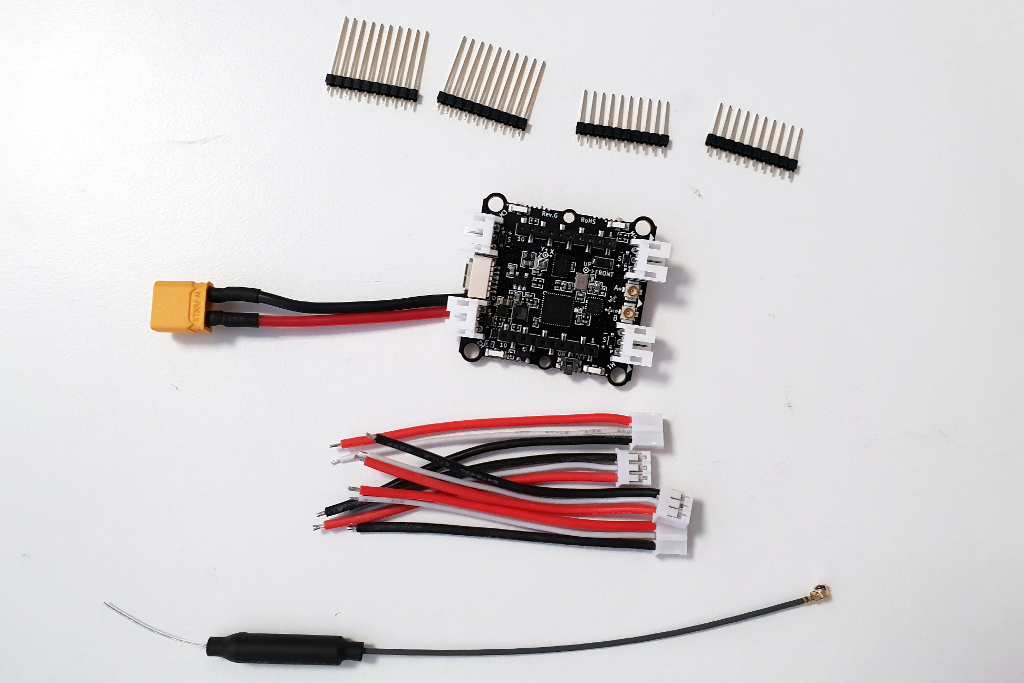
We have now come to a the point were we will start manufacturing of the Crazyflie Bolt, Formally known as the RZR. You might wonder why we changed the name… Well the RZR more implies it is a Racer quad and it really isn’t. This is mainly because of the design in power distribution which is limited to around 8A per motor. However by using your own PDB it will work well for that too. But that is not the intention, it is more intended to have the strengths of the Crazyflie 2.1 but in a slightly bit bigger package. Therefore we wanted a better name for it and after a brainstorming session we came up with the name, Bolt. Both as it is a Crazyflie building block, a bolt used to fasten things, but also because it has the potential to be fast, as in a lightning bolt. Great name right :-)
The CF-Bolt development has been pushed back many times because of other more promising products, but finally it is getting here. If things goes according to plan, the Crazyflie Bolt should be in our shop in Aug-Sept. If you want to read up on the history and what it is all about read about the first flight to the almost-final prototype here.
A quick recap of the features:
Fully compatible with the CF2 firmware, expansion decks as well as radio.
Connectors to attach motor controllers (also possible to solder though) so it is easy to build and repair.
Power distributions built into controller board. (Max ~8A per motor controller) with XT30 connector.
Motor controllers can be switched off by the system (MOSFET) so the system can go into deep sleep and only consume around 50uA.
Voltage input 1S-4S (3V to 17V).
Standard mounting (M3 mounting holes spaced 30.5mm in a square).
Many of our users are flying larger and larger swarms and we’ve been getting some feedback that there’s communication issues when connecting to many Crazyflies. So during the last weeks we’ve been looking at this. Among the things we’re doing is building a test rig where we can automate the communication testing (last weeks blog post). We’ve also fixed a few communication issues listed below.
One of the issues causing problems is dropping packages coming in to the Crazyflie. If the flow of packages was too high to one CRTP port these would start dropping. This has now been fixed by increasing the length of the queues for each port. (GitHub issue)
Another issues has been logging data piling up after disconnect. The detection for the radio disconnection was boken so logging data would continue to be generated and pushed into the communication stack. This has now been fixed so logging will be reset which should clear up he congestion on the next connect. (GitHub issue)
Lastly we also fixed the USB communication issue with dropped packages and crashing when the USB was disconnected. (GitHub issue)
We’ve already noticed a few other issues when using the rig so there should be more fixes coming soon. In the meantime test out the new firmware and let us know if there’s still issues.
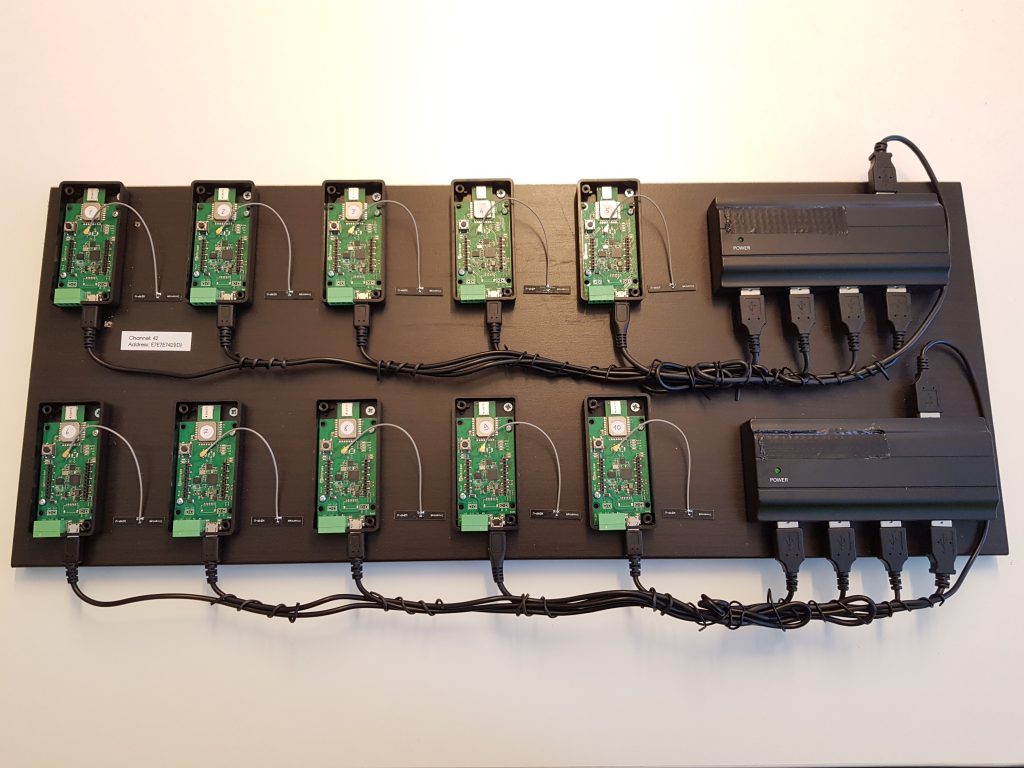
While running our ICRA demo, we came across a bug in the Crazyflie python-lib radio handling, limiting the number of Crazyflie that could be controlled using one Crazyradio PA. Communication with many Crazyflies is crucial as flying swarms is becoming more of an interesting topic for research and education. So we decided to take the problem at hand and create a radio test-bench:
To make the test-bench we have attached 10 roadrunner boards to a plank of wood together with USB switches that can provide enough power to the roadrunners. We used the roadrunner because it is mechanically easier to use in this context and it has an identical architecture to the Crazyflie 2.1 when it comes to the radio implementation.
Initially we will use the test-bench to run test scripts that pushes the communication to its limits and that consistently test the communication stack functionalities. This should allow us to find bug and verify that we solve them as well as discovering and documenting limitations.
Eventually we want to connect a raspberry-pi to the test-bench and run tests for each commit and pull-request to the crazyflie-firmware, crazyflie2-nrf-firmware and crazyflie-lib-python projects. This will guarantee that we do not introduce new limitations in the communication stack. The test-bench will also be very useful in implementing new functionalities like direct crazyflie-to-crazyflie P2P communication.
As a final note, the Crazyswarm project is not affected by the Crazyflie-lib bug since it is using the C++ implemented crazyflie-ros driver. Hence Crazyswarm can control more Crazyflies per Crazyradio PA, so it is still the preferred way to fly a swarm mostly when using a motion capture system. Though, with the progress made on LPS and Lighthouse positioning, running swarms, using the python API directly is a probably a more lightweight alternative.
3 of us where at ICRA 2019 in Montreal last week, where we met a lot of interesting people and a lot of Crazyflie users. Thanks a lot to everyone that drop by our booth, and for the ones that missed it we are planning on being at iROS2019 later this year so we might see you there :-).
We have already described our demo in a previous post, now that we run it we can update on how it went. We are also updating the ICRA2019 page with the latest source code and information so that anyone interested can reproduce the demo.
In its final state at the conference, the demo contained 8 Crazyflies 2.1 equiped with Lighthouse deck and Qi charger deck. There were 8 3D-printed charging pads on the floor with Ikea Qi wireless chargers and two HTC Vive base stations (V1) on tripods. The full system was contained in a cage, built from 50 cm-long tubes or aluminium and nets.
The full setup of the booth took us about 4 hours, this included about 3 hours for the cage, 15 min for the demo including calibration of the lighthouse base-station geometry and the rest to fine-tune things. This is by far our best setup time, we still need to prettify the cage a bit and to make is easier to install, but we will most likely re-use this system for upcoming conferences.
In this demo we aimed at keeping a Crazyflie in the air at every moment, to do so we had a computer connected to all 8 Crazyflies sending to one of them the signal to start flying if no other where actually in the air flying a trajectory. The flight was completly autonomous as we explained in our previous blog post. We setup the Crazyflie to fly 2 cycles and then land, which increase the rate of swap and so increased the ‘action’, though it also meant that during the swap two Crazyflies where flying. This drained the batteries a bit more than expected and meant that after about an hour all the Crazyflies where bellow the take-off threshold and we had to wait ~30 seconds between flights. Here is a video of it in action:
The demo was very care-free, we had very few Crashes and we mostly restarted the Crazyflies to swap batteries manually to add a bit of power in the swarm. The last day we decided to spice it up a little bit by adding a chair in the cage and by calibrating the chair position and flight trajectory, we managed to have the Crazyflie partly fly under it. This worked quite well most of the time and showed that the lighthouse positioning is repeatable and works fairly well with short occlusion in the path. Though we also found out that even though a single Crazyflie would always fly the same trajectory, two different Crazyflies will not. We think differences in propeller stiffness and the fact that the our Mellinger position controller has not been calibrated for changing YAW are the main reasons.
If you want to know more about the demo or if you want to reproduce it do not hesitate to visit the ICRA 2019 page that explains it in more details and links to the source code of everything including 3D printed parts for the cage and the landing pads.
Only a week left until we stand in our ICRA booth in Montreal and give you a gimps of what we do here at Bitcraze. As we have been writing about earlier we are aiming to run a fully automated demo. We have been fine tuning it over the last couple of days and if something unpredictable doesn’t break it, we think it is going to be very enjoyable. For those that are interested in the juicy details check out this informative ICRA 2019 page, but if you are going to visit, maybe wait a bit so you don’t get spoiled.
Apart from the demo we are also going to show our products as well as some new things we are working on. The brand new things include:
AI-deck, Active marker deck and Lighthouse-4 deck
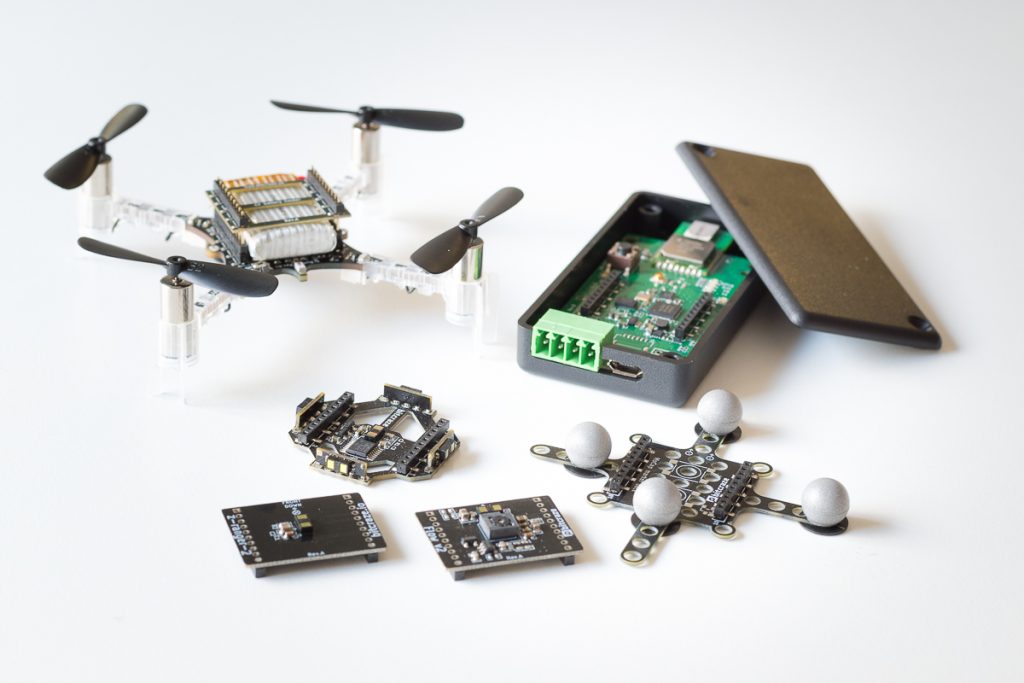
AI-deck: This is a collaborative product between GreenWaves Technologies, ETH Zurich and Bitcraze. It is based on the PULP-shield that the Integrated and System Laboratory has designed. You can read more about it in this blog post. The difference with the PULP-shield is that we have added a ESP32, the NINA-W102 module, so that video can be streamed over WiFi. This we hope will ease development and add more use cases.
Active marker deck: Another collaboration, but this time with Qualisys. This will make tracking with their motion capture cameras easier and better. Some more details in this blog post. Qualisys will have the booth just next to us were it will be possible to see it in a live demo!
Lighthouse-4 deck: Using the Vive lighthouse positioning system this deck adds sub-millimeter precision to the Crazyflie. This is the deck used in the demo and could become the star of the show.
Adding to the above we will of course also display our recently released products:
Crazyflie 2.1: The Crazyflie 2.1 is an improvement of the Crazyflie 2.0 but keeping backward capability.
Better radio performance and external antenna support: With a new radio power amplifier we’ve improved the link quality and added support for dual antennas (on-board chip antenna and external antenna via u.FL connector)
Better power button: We’ve gotten feedback that the power button breaks too easily, so now we’ve replaced with a more solid alternative.
Improved battery cable fastening: To avoid weakening of the cables over time they are now run through a cable relief.
Improved sensors: To make the flight performance better we’ve switched out the IMU and pressure sensor. The new Crazyflie uses the drone specialized sensor combo BMI088 and BMP388 by Bosch Sensortech.
Flow deck v2: The Flow deck v2 has been upgraded with the new ST VL53L1x which increases the range up to 4 meters
Z-ranger deck v2: The Z-ranger v2 deck has been upgraded with the new ST VL53L1x which increases the range up to 4 meters
Multi-ranger deck: The Multi-ranger deck adds VL53L1x sensors in all directions for mapping and obstacle avoidance.
MoCap marker deck: The motion capture deck with support for easily attachment of passive markers for motion capture camera tracking.
Roadrunner: The Roadrunner is released as early access and the hardware is basically a Crazyflie 2.1 without motors and up to 12V input power. This enables other robots or system to use the loco positioning system.
You can find us in booth 101 at ICRA 2019 (in Montral, Canada), May 20 – 22. Drop by and say hi, check out the products & demo and tell us what you are working on. We love to hear about all the interesting projects that are going on. See you there!
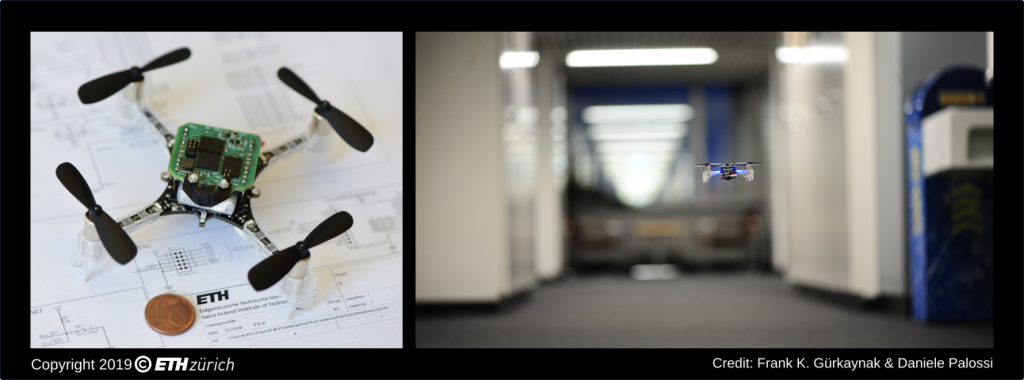
Hi everyone, here at the Integrated and System Laboratory of the ETH Zürich, we have been working on an exciting project: PULP-DroNet. Our vision is to enable artificial intelligence-based autonomous navigation on small size flying robots, like the Crazyflie 2.0 (CF) nano-drone. In this post, we will give you the basic ideas to make the CF able to fly fully autonomously, relying only on onboard computational resources, that means no human operator, no ad-hoc external signals, and no remote base-station! Our prototype can follow a street or a corridor and at the same time avoid collisions with unexpected obstacles even when flying at high speed.
PULP-DroNet is based on the Parallel Ultra Low Power (PULP) project envisioned by the ETH Zürich and the University of Bologna. In the PULP project, we aim to develop an open-source, scalable hardware and software platform to enable energy-efficient complex computation where the available power envelope is of only a few milliwatts, such as advanced Internet-of-Things nodes, smart sensors — and of course, nano-UAVs. In particular, we address the computational demands of applications that require flexible and advanced processing of data streams generated by sensors such as cameras, which is beyond the capabilities of typical microcontrollers. The PULP project has its roots on the RISC-V instruction set architecture, an innovative academic and research open-source architecture alternative to ARM.
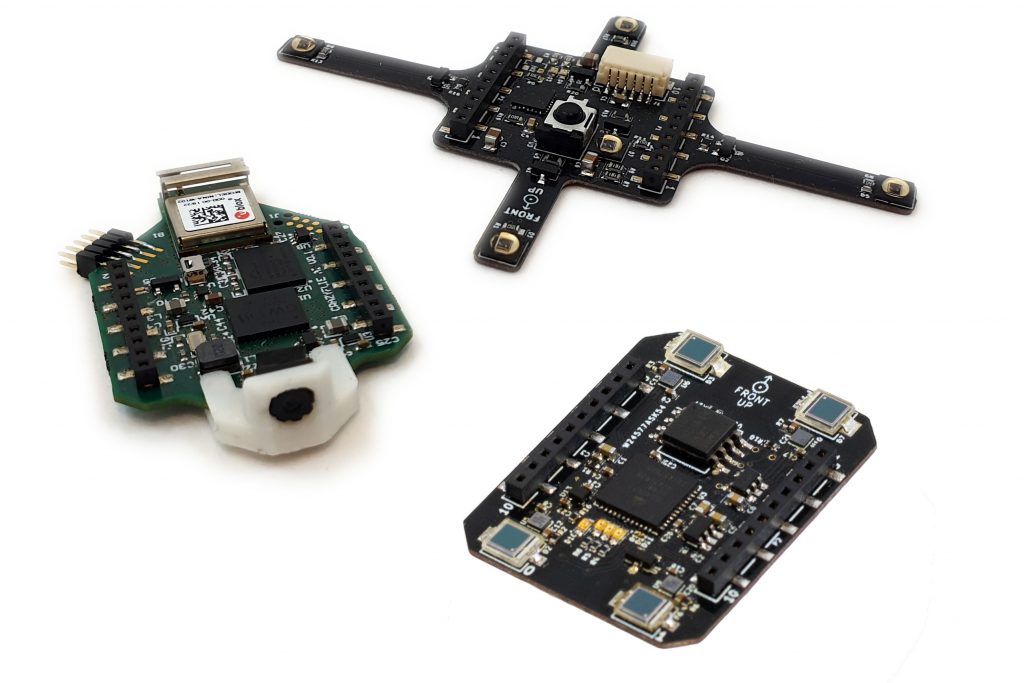
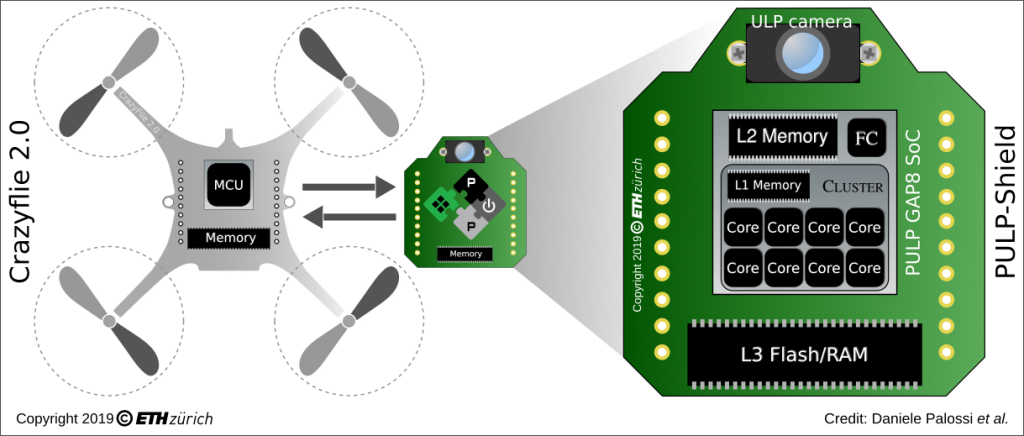
The first step to make the CF autonomous was the design and development of what we called the PULP-Shield, a small form factor pluggable deck for the CF, featuring two off-chip memories (Flash and RAM), a QVGA ultra-low-power grey-scale camera and the PULP GAP8 System-on-Chip (SoC). The GAP8, produced by GreenWaves Technologies, is the first commercially available embodiment of our PULP vision. This SoC features nine general purpose RISC-V-based cores organised in an on-chip microcontroller (1 core, called Fabric Ctrl) and a cluster accelerator of 8 cores, with 64 kB of local L1 memory accessible at high bandwidth from the cluster cores. The SoC also hosts 512kB of L2 memory.
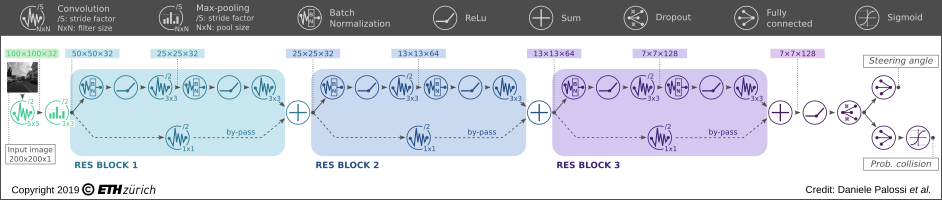
Then, we selected as the algorithmic heart of our autonomous navigation engine an advanced artificial intelligence algorithm based on DroNet, a Convolutional Neural Network (CNN) that was originally developed by our friends at the Robotic and Perception Group (RPG) of the University of Zürich. To enable the execution of DroNet on our resource-constrained system, we developed a complete methodology to map computationally-intense deep neural networks on the PULP-Shield and the GAP8 SoC. The network outputs two pieces of information, a probability of collision and a steering angle that are translated in dynamic information used to control the drone: respectively, forward velocity and angular yaw rate. The layout of the network is the following:
Therefore, our mission was to deploy all the required computation onboard our PULP-Shield mounted on the CF, enabling fully autonomous navigation. To put the problem into perspective, in the original work by the RPG, the DroNet CNN enabled autonomous navigation of big-size drones (e.g., the Bebop Parrot). In the original use case, the computational power and memory was not a problem thanks to the streaming of images to a remote base-station, typically a laptop consuming 30-100 Watt or more. So our mission required running a similar workload within 1/1000 of the original power. To make this work, we combined fixed-point arithmetic (instead of “traditional” floating point), some minimal modification to the original topology, and optimised memory and computation usage. This allowed us to squeeze DroNet in the ultra-small power budget available onboard. Our most energy-efficient configuration delivers 6 frames-per-second (fps) within only 64 mW (including all the electronics on the PULP-Shield), and when we push the PULP platform to its limit, we achieve an impressive 18 fps within just 3.5% of the total CF’s power envelope — the original DroNet was running at 20 fps on an Intel i7.
Do you want to check for yourself? All our hardware and software designs, including our code, schematics, datasets, and trained networks have been released and made available for everyone as open source and open hardware on Github. We look forward to other enthusiasts contributions both in hardware enhancement, as well as software (e.g., smarter networks) to create a great community of people interested in working together on smart nano-drones. Last but not least, the piece of information you all were waiting. Yes, soon Bitcraze will allow you to enjoy of our PULP-shield, actually, even better, you will play with its evolution! Stay tuned as more information about the “code-name” AI-deck will be released in upcoming posts :-).
One Crazyflie flying and 5 re-charging on their pads
Running a demo with flying Crazyflies at a conference, usually means a lot of work with changing and charging batteries, starting demos and so on. This takes time and leads to less time to talk to all the interesting people that visit our booth. This year we are aiming at making the demo as fully automated as possible. We will have 8 Crazyflie 2.1 with Lighthouse and Qi charger decks, each with a charging pad. A computer will orchestrate the Crazyflies and make sure one is flying at all times while the others re-charge their batteries. When the battery of the flying Crazyflie is depleted it goes back to its pad while another one takes over.
Most of the functionality is implemented in the Crazyflie firmware and it is pretty much autonomous after the trajectory is started. It will fly the trajectory over and over until it is low on battery, when it goes back to where it started from for recharging. Even though the Lighthouse positioning is very good, it sometimes slips off the charging pad when landing, so we have added a reposition feature to take off again and land if it is not charging after landing.
The orchestration computer (we call it the Control tower) is just keeping track of the state of the flying copter and starts a new one when the flying one goes back the the pad.
We are reusing the spiral trajectory from IROS last year and it has the property that it is possible to run up to 4 copters at the same time without colliding, if they are started at the correct times. There is a swarm feature in the Control tower that runs up to 4 Crazyflies with continuous replacements. The chargers are not fast enough to keep it going and it does not work as expected every time, but it is exciting with a few more Crazyflies buzzing around!
You can find us in booth 101 at ICRA 2019, May 20 – 22. Drop by and say hi, check out the demo and tell us what you are working on. We love to hear about all the interesting projects that are going on. See you there!
As part of our collaboration with Qualisys we are helping them developing an active marker deck for their motion capture cameras. One of the major benefits with an active marker deck is that it can have an ID, thus it is much easier to track each Crazyflie in e.g. a swarm. Another benefit is an increased range compared to passive markers thanks to high power emitting IR LEDs.
Active marker deck mounted on a Crazyflie
We are currently only in the prototype stage but we have already managed to do initial fight tests so hopefully we can release it within a couple of months.
We will bring some prototypes to ICRA 2019, come and visit us and Qualisys to check the deck out.
We attended the Innovation Week at Lund University on Thursday last week. Primarily we wanted to talk to students and possibly find future colleagues (yes, we are hiring) but it was also a good opportunity to get some demo time with the Lighthouse positioning system.
The demo setup. A bit blurry, sorry!
As mentioned in an earlier blog post, we are going to ICRA in May and we have started to think about what to demo. The main feature will of course be the Lighthouse deck. The setup at Innovation week also served the purpose of a first iteration for the ICRA setup.
We reused an old cage that we created for another fair a couple of years ago, built from a garden tent. It turned out to be fairly wobbly and a bit heavy (steel tubing) considering we will bring it in our luggage to Canada. We probably have to rethink the construction a bit and see if we can change to aluminium.
We put the Lighthouse base stations on tripods, which worked like a charm in our flight lab. We found that we had a lot of problems calibrating the system, not to mention flying the Crazyflie, at the Innovation week fair though. It turned out that the floor was not as stable as one might expect and that the tripods were swaying when people walked by. We solved the problem by adding a tube to the top of tripod that was pushed against the ceiling and thus minimizing the movement. Experience from the real world is always useful!
The general idea for the demo at ICRA is to automate as much as possible to give us more time with visitors. With the high precision of the Lighthouse system, it should be easy to land the Crazyflies on Qi chargers to avoid changing batteries. We hope to set up 6-8 Crazyflies where one is always flying while the others are charging, and have the possibility to temporarily fly more Crazyflies for small swarms. It is still just ideas and we will not see the end result until we are at ICRA, but it will be fun to build!