UAV Recharging for Remote Applications
Unmanned aerial vehicles (UAV) are invaluable to challenging remote applications, including coastal monitoring, surveillance for safe passage in icy waterways, and search-and-rescue missions. However, after deployment in a remote setting, the functional life of the multirotor is ultimately limited by its battery life. The research we continue to investigate is the ability to cooperatively and autonomously land a multirotor on an uncrewed surface vessel (USV) for recharging. We address this problem in real time with safe control algorithms that we apply on a Crazyflie.

Approach
Our approach enables the Crazyflie to cooperatively coordinate, with a simulated USV, a safe landing in severe wave conditions. It is critical to the autonomy of the system that the agents do not know when or where they’re going to land at the outset, they are cooperating in real time to make these determinations. The novelty of this work is three primary contributions:
Learning a Spatial-Temporal Wave Model as a Gaussian Process
We first learn the local tilt model, representative of the spatial and temporal impact of waves on the tilt angle of a USV, using Gaussian Process (GP) regression. Prior to the execution of the landing, the USV collects Nd noisy observations D = {q, t, φ²}, where q is the position of the USV, t is time, and φ is the tilt angle of the USV. We use GP regression to learn the spatial-temporal tilt model: fw(q, t) = (φ(q, t))² . The predicted tilt and uncertainty, conditioned on the observed data D, at a query point a = [q, t] can be inferred using the posterior distribution.
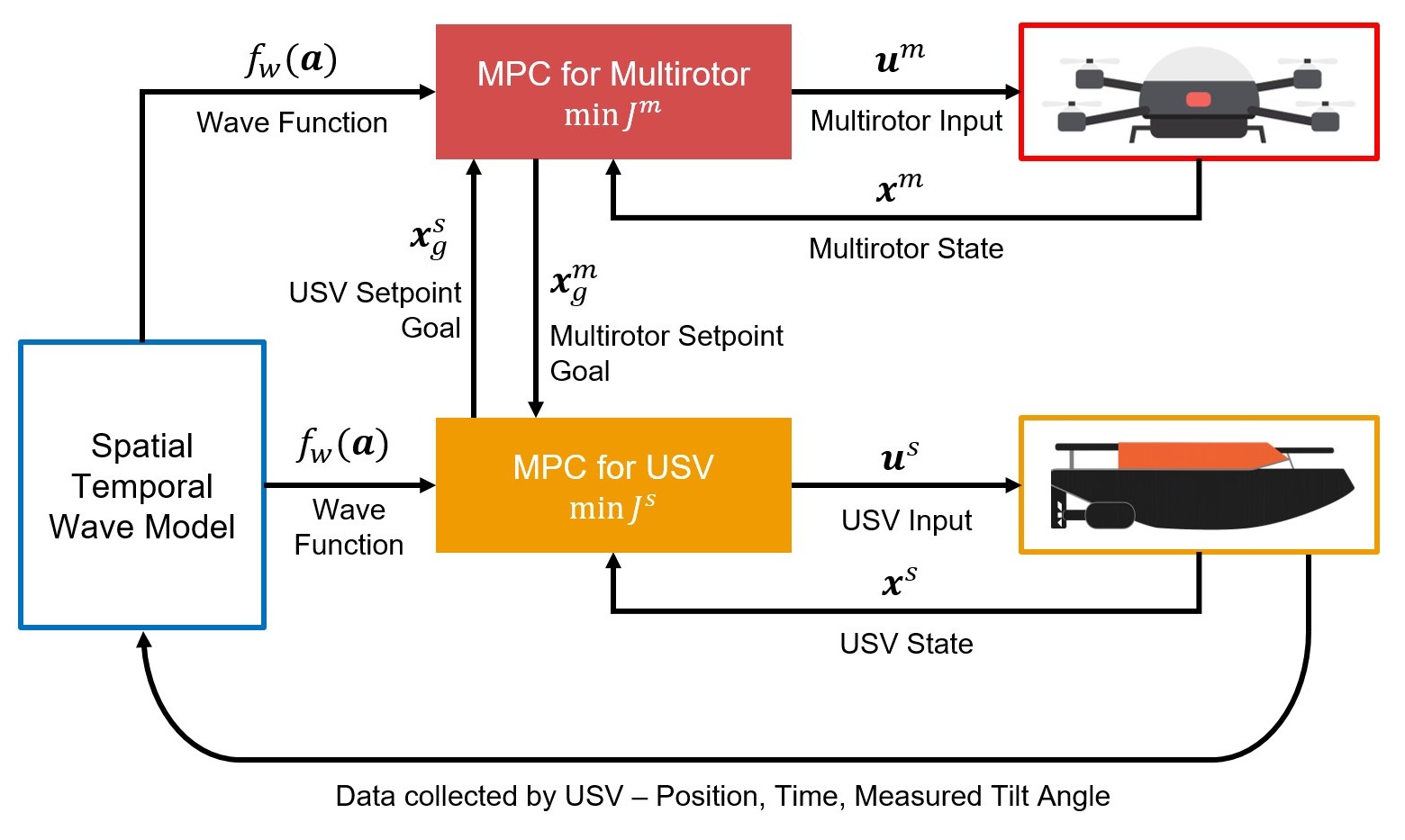
Distributed Model Predictive Control
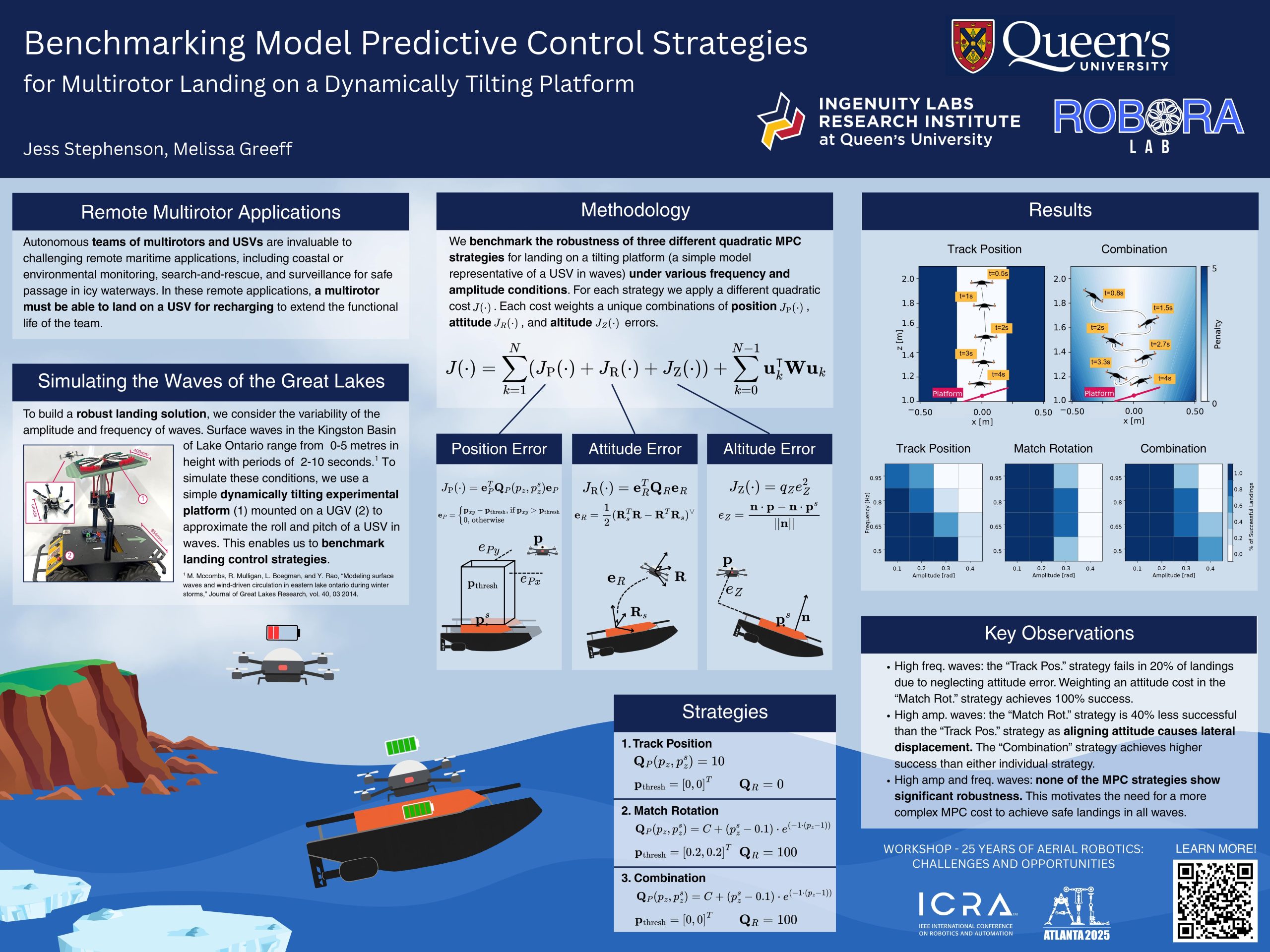
Our proposed model predictive control (MPC) architecture combines standard tracking MPCs for the Crazyflie and USV and augments them with additional artificial goal locations. These artificial goals enable the vehicles to coordinate without prior guidance. Each vehicle solves an individual optimization problem for both the artificial goal and an input that tracks it but only communicates the former to the other vehicle. The MPC integrates, into the cost functions for both vehicles, the learned mean and uncertainty quantification of the spatial-temporal wave model from the GP regression. This encourages the agents to converge to calmer waters enabling safer landings in variable wave conditions.
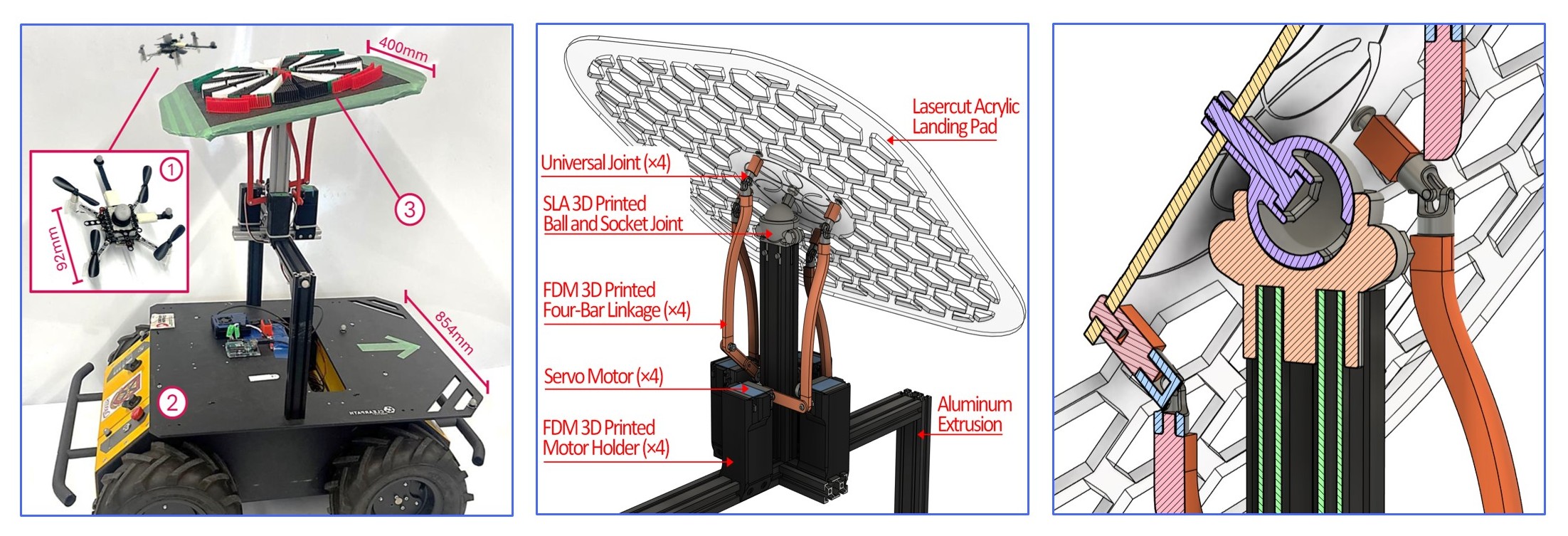
Low-Cost USV Simulation Testbed Platform
To validate the proposed MPC scheme for landing on a USV, we simulate the spatial-temporal motion of a USV in waves of variable intensity using a custom tilting platform. The custom tilting platform has two degrees of freedom (roll, pitch) and is affixed to the deck of a differential-drive unmanned ground vehicle (UGV), the ClearPath Robotics Husky. We selected a differential-drive UGV to replicate the motion of a broad range of USVs, including those with differential drive and conventional rudder steering. Our platform is low-cost, modular, and open source, enabling rapid testing and benchmarking of UAV-USV landing strategies indoors before going onto the water which is high-risk and expensive.
Experimental Setup
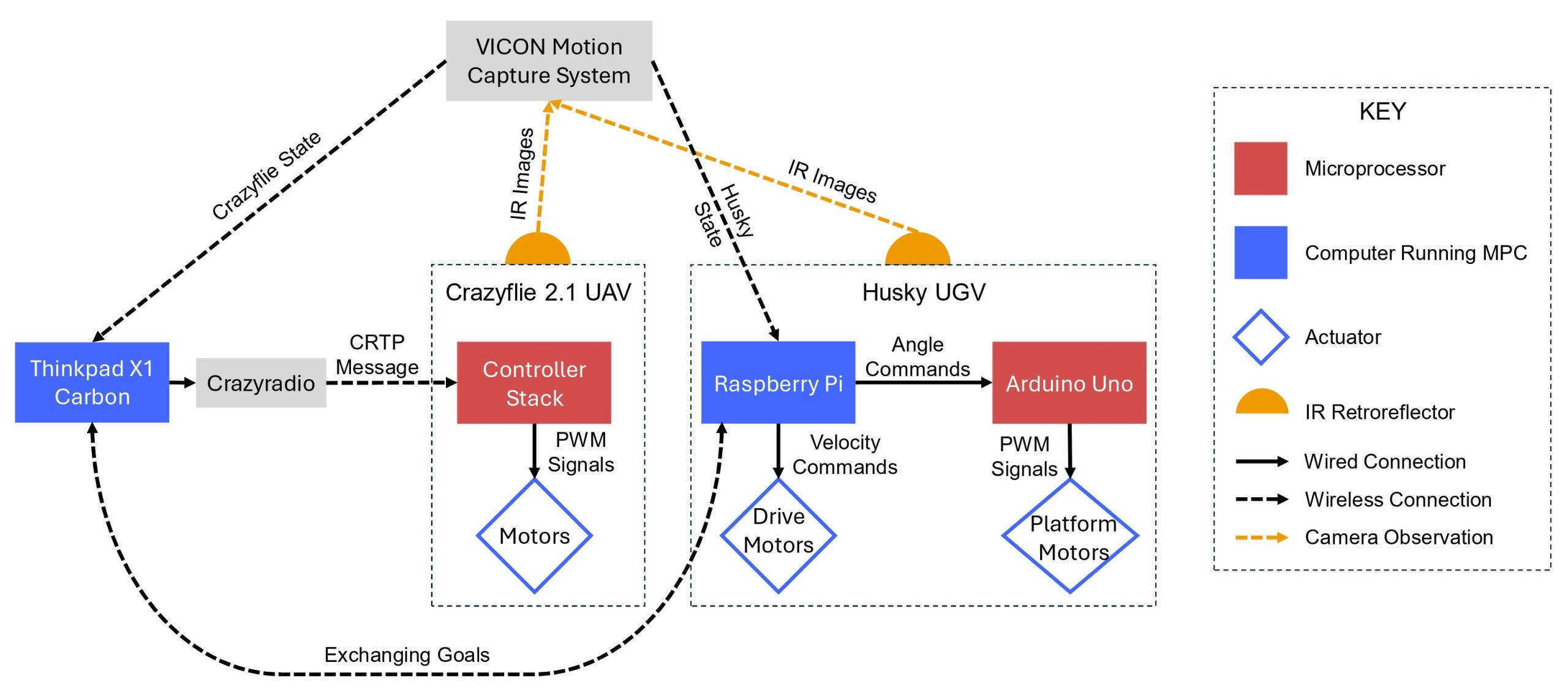
We evaluate the proposed MPC scheme for UAV-USV cooperative landing in indoor experiments using the Crazyflie 2.1 and our tilting platform. These experiments represent a scaled-down version of real-world harsh wave conditions. Amplitude and frequency are informed by a survey of waves along the coastlines of the Great Lakes of North America. We select a spatially decaying sine wave whose amplitude decreases gradually with increasing x-position. We expect the Crazyflie and the simulated USV to cooperatively select the safest landing spatially and temporally by learning the GP and incorporating it the MPC scheme.
The UAV MPC is run off-board on a Thinkpad X1 Carbon with Intel Core i7-1270P Processor. The MPC runs at a frequency of 50Hz and transmits control inputs to the Crazyflie via long range Crazyradio USB. The Raspberry Pi onboard the Husky runs its MPC at 10Hz. The two vehicles communicate their goals using ROS topics on a local WiFi network and receive their own pose feedback at 240 Hz from a VICON motion capture system.
Experimental Results
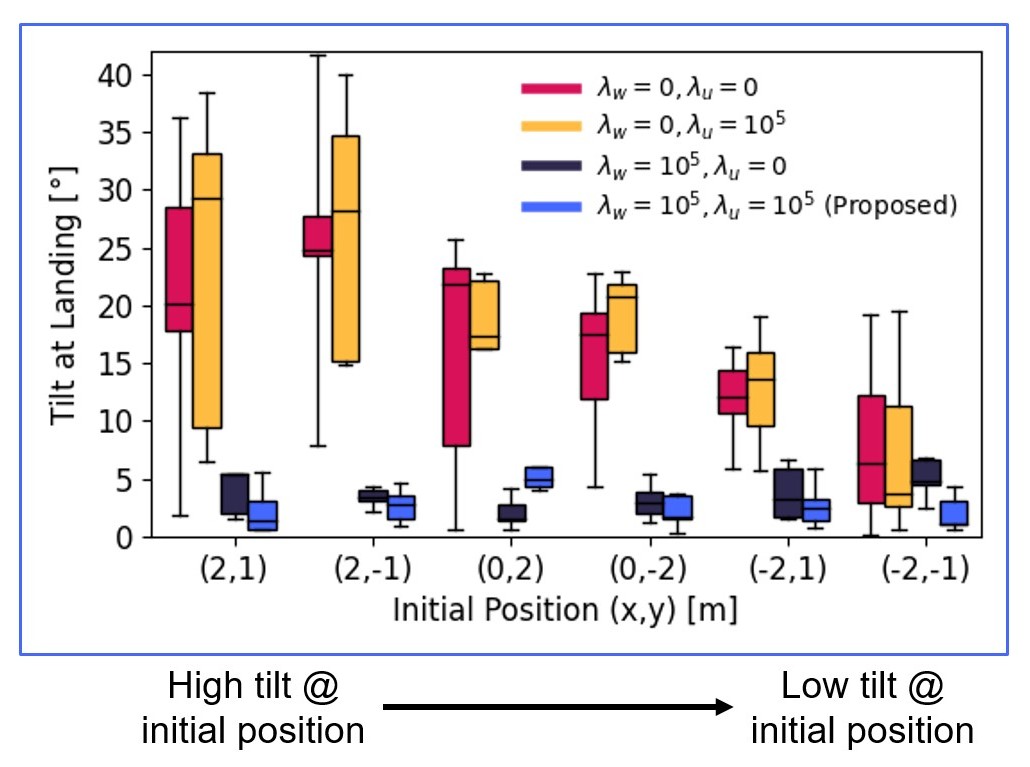
In the first set of experiments, we assume no uncertainty in the tilt model. We compare four MPC weighting strategies ranging from a purely cooperative strategy in red (where neither vehicle weights wave tilt in the MPC, neglecting spatial-temporal tilt motion), to our proposed strategy in blue (where both vehicles weight wave tilt highly in the MPC). In this set of experiments, our proposed approach (blue) reduces the tilt angle of the platform at landing by between 68-89% and results in a 53% increase in landing success rate over the purely cooperative strategy (red).
In the second set of experiments, we learn the wave tilt model as a GP. We compare the purely cooperative strategy in red from before to our proposed strategy in blue where we weight the posterior mean cost from the GP regression. In this set of experiments, our proposed approach (blue) reduces tilt angle of the platform at landing by 23-32% and results in a 47% increase in the landing success rate over pure cooperation (red).
Future Work
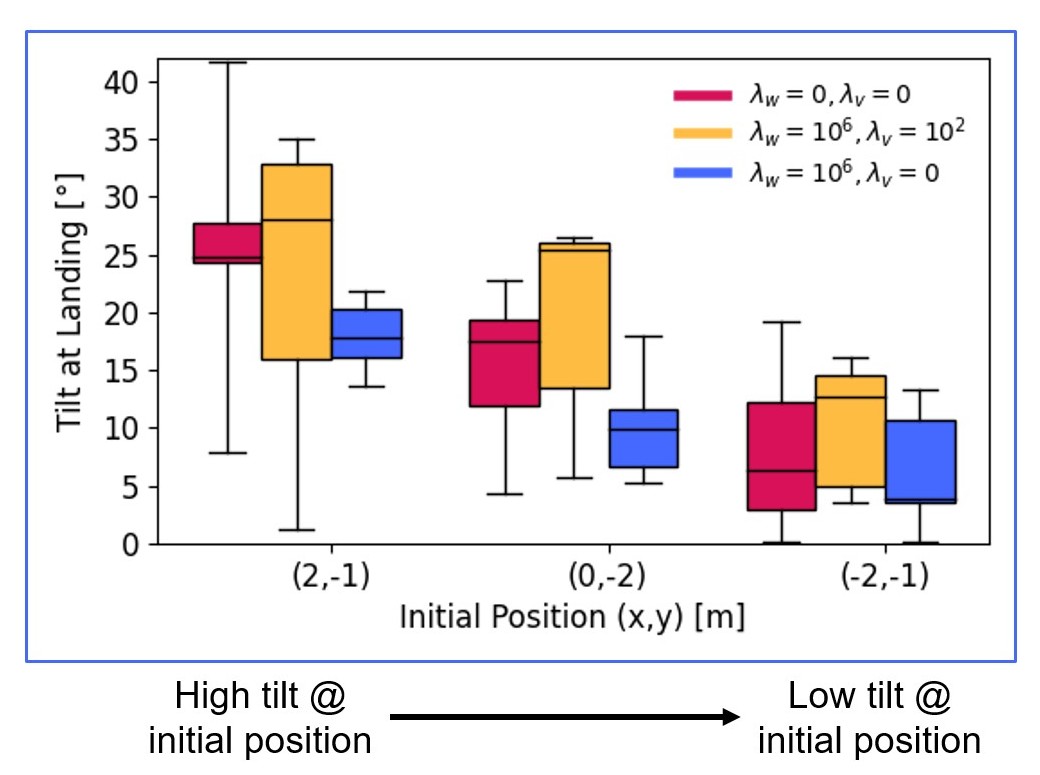
In the work presented above we assume that there is a local region with calm waves that can be reached by both vehicles to then perform a safe landing. However, in practical scenarios, spatial-temporal assumptions are not realistic if an emergency landing is necessary or if time and resources are constrained. Recently, we explored quadratic MPC strategies for landing a Crazyflie on the tilting platform in high frequency high amplitude conditions. In these strategies we include optimization costs that weigh position, attitude, and altitude errors between the multirotor and the platform.
Though all strategies successfully land in low-frequency, low-amplitude conditions, they have low success in the higher-amplitude conditions. Therefore, designing a safe controller that is robust to a wide range of wave amplitudes and frequencies is an ongoing research area.
Links
- ICUAS 2025 Paper: ieeexplore.ieee.org/document/11007817
- Open-Source Code & Platform Design: github.com/Robora-Lab
- Project Page: robora-lab.github.io/uav-usv-landing
- Robora Lab: roboralab.com
- ICRA 2025 Workshop Paper: aerial-robotics-workshop-icra.com/Poster11.pdf