Propellers of high quality and good balance has not been easy to find for drones in the Crazyflie size. Not that long ago HQ-prop released a propeller, 51MMX2GR-1MM-PC, with 51mm in diameter (2 inch) that could work well for the Crazyflie 2.1. HQ-prop is famous for making good propellers for FPV-drones and them releasing a 51mm propeller was quite exciting as this could be used on the Crazyflie. After getting some samples we tested them with a couple of different 7x20mm coreless bushed motors with different rpm/v (KV) values until we found a good match, a 13400 KV motor. With this motor the maximum thrust of a Crazyflie using a new charged battery reaches ~80 grams. This is ~40% more thrust then the stock Crazyflie 2.1 with a 60 grams of total maximum thrust. It does come at an expense of efficiency though and the hover time is reduced from ~7:00 to ~6:00 minutes.
Crazyflie 2.1 with 51mm propellers and 7×20 mm coreless brushed motors
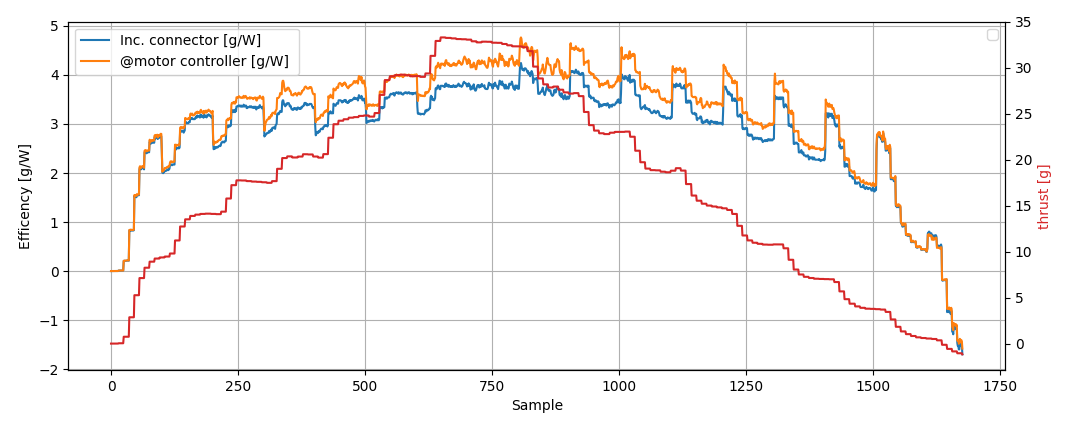
Using the thrust stand we wrote about and built earlier we can get an estimated value of the efficiency which is interesting in many aspects.
Instead of ramping up/down the PWM in very small steps as was done in the thrust stand post, the same test has been changed to do it in larger steps to make it easier to separate the changed efficiency effect when doing acceleration/deceleration. Another thing to note is that in this test the PWM was only ramped up to 50% as the RPM measurement sensor had trouble tracking the transparent-grey propeller at higher speeds. There are two lines graphing the efficiency where the blue line is the one including the losses in the connector which should be closest to the real overall efficiency. Following the blue line we can see that at ~33 grams of thrust we get ~3.8 g/W. Very similar to the stock Crazyflie 2.1 setup with 45mm propeller and 7×16 mm motor.
So if you are in a need for some more thrust because you are using many decks, or maybe just because you want more agility, be sure to watch out for the thrust upgrade kit that will be released during the fall!
IROS
The two coming weeks are going to be a little special for us: as written before, we’re going to Japan ! Kimberly is already there for ROSCon, but we will have a booth at IROS. If you’re there, don’t forget our tech meetup on Monday 24th of October at 16.00 at our booth 59.
The whole company is going there, so there may be some delays in handling emails and shipping from the end of this week.
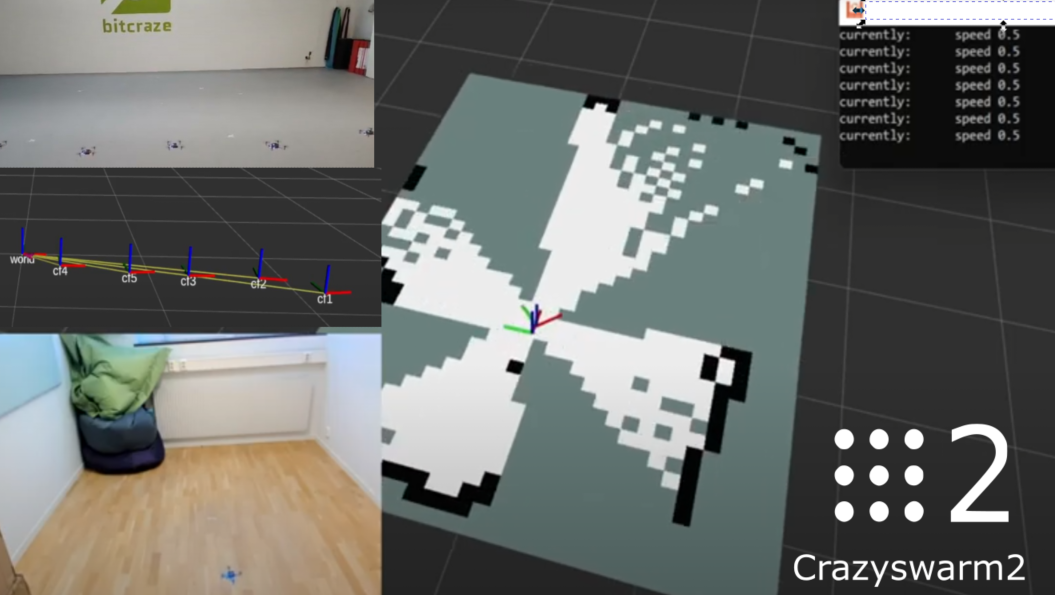
As you probably noticed already, this summer I experimented with ROS2 and connecting the Crazyflie with multi-ranger to several mapping and navigation nodes (see this and this blogpost). First I started with an experimental repo on my personal Github account called crazyflie_ros2_experimental, where I managed to do some mapping and navigation already. In August we started porting most of this functionality to the crazyswarm2 project, so that is what this blogpost is mostly about.
Crazyswarm goes ROS2
Most of you are already familiar with Crazyswarm for ROS1, which is a project that Wolfgang Hönig and James Preiss have maintained since its creation in 2017 at the University of Southern California. Since then, many have used and referred to this work, since the paper has been cited more than 260 times. From all the Crazyflie papers of the latest ICRA and IROS conferences, 50 % of the papers have used Crazyswarm as their communication middleware. If you haven’t heard about Crazyswarm yet, please check-out the nice BAMdays talk Wolfgang gave last year.
Unfortunately, ROS1 will not be there forever and will be phased out anno 2025 and will not be supported for Ubuntu 22.04 and up. Therefore, Wolfgang, now at the Intelligent Multi-robot Coordination Lab at TU Berlin, has already started with the ROS2 port of Crazyswarm, namely Crazyswarm2. Here the same principle of the C++ based Crazyflie server and the python wrapper were been implemented, along with the simple position based simulation and Teleop nodes. Mind that the name Crazyswarm2 is just the project name out of historic reasons, but the package itself can also be used for individual Crazyflies as well. That is why the package names will be called crazyflie_*
Porting the Summer Hack project to Crazyswarm2
The crazyflie_ros2_experimental was fun to hack around, as it was (as the name suggests) experimental and I didn’t need to worry about releases, bugfixes etc. However, the problem of developing only here, is that the further you go the more work it becomes to make it more official. That is when Wolfgang and I sat down and started talking about porting what I’ve done in the summer into Crazyswarm2. This is also a good opportunity to get more involved with the project, especially with so many Crazyfliers using the ROS as well.
The first step was to write a second crazyflie_server node that relied on the python CFlib. This means that many of the variables I used to hardcode in the experimental node, needed to be defined within the parameter structure of ROS2. The crazyflies.yaml is where anything relevant for the server (like the URIs and parameters) needs to be defined. Both the C++ backend server and the CFlib backend server are using the same parameters. Also the functionality of the both servers are pretty similar, except for that logging is only possible on the CFlib version and uploading/follow trajectories is only possible on the C++ version. An overview will be provided soon on the Crazyswarm2 documentation website.
The second step was to make the crazyflie_server (cflib) node suitable to be connected to external packages that I’ve worked with during the hack project. Therefore, there are some special logging modes, that enables the server to not only output topics based on logging, but Pose/Odometry/LaserScan messages along with Transforms. This allowed the SLAM_toolbox to use the data from the Crazyflie itself to create a map, which you can see an example of in this tutorial.
Moreover, for the navigation it was important that incoming Twist messages either from keyboard or from a navigation toolkit were handled properly. Most of these packages assume a 2D non-holonomic robot, but a quadcopter like the Crazyflie needs to first take off, stay in the air and land. Therefore in the examples, a separate node (vel_mux.py) was written to receive incoming Twist messages, first have the Crazyflie take off in high level commander, and keep sending hover commands to keep it in the air until a land service is called.
What’s next?
As you probably noticed, the project is still under development, but at least it is now at a good state that we feel comfortable to presented at the upcoming ROScon :) We also want to include an more official simulation package, especially now that the Crazyflie has recently became part of the official release of Webots 2022b, but we are currently waiting on the webots_ros2 to be released in the ubuntu packages. Moreover, the idea is to provide multiple simulation backends that based on the requirement of the topic (swarms, vision-based etc), the user can select the simulation most useful for their situation. Also, we would like to even out the missing items (trajectory handling, logging) in both the cflib and cpp backend of the crazyflie_server so that they can be used interchangeably. Also, I saw that the experimental simple mapper node has been featured on social media, so perhaps we should be converting that to Crazyswarm2 as well :)
So once we got the most of the above mentioned issues out the way, that will be the time that we can start discussing the official release of a ROS2 Crazyflie package with its source code residing in the Crazyswarm2 repository. In the meantime, it would be awesome that anybody that is interested in ROS2, or want to soon upgrade their Crazyswarm(1) packages to ROS2 to give the package a whirl. The more people that are trying it out and report bugs/proposing fixes, the more stable it becomes and closer it will come to an official release! Please join us and start any discussions on the Crazyswarm2 project github repository.
This fall is full of exciting events for us, and none are more excitedly expected than our visit to Japan. Yes, the whole company (6 people) are travelling to Kyoto for at least a week – but not for sightseeing (well, not only). Here is what we have planned:
ROSCon
As per tradition, ROSCon is held shortly before IROS. So, on the 19 to 21 October, Kimberly will be here to represent us along the ROS community. She will even have a presentation about the latest ROS2 integrations in collaboration with the maintainers of Crazyswarm2. It’s on October 21st, 16.50 local time so if you’re there make sure to hear her talk !
IROS
From the 21st to the 27th of October, IROS will be held at the Kyoto International Conference Center. it’s one of largest robotics conference worldwide, with almost 1750 papers presented. As the first in-person session of the conference since the beginning of the Covid pandemic, we had to be there. We will man the booth during the whole conference, with the demo our intern Marios has worked on a lot. And since it’s been a long time since we’ve been able to gather and talk together, we thought it would be great to have an official meetup at IROS for those interested.
So, please note this official invitation to Bitcraze’s tech meetup at IROS! If you’re at IROS and want to meet us together with other Crazyflie users, then let’s get together on Monday 24th of October at 16.00 at our booth 59. It’s the perfect occasion to (re)connect, to get the latest news about Bitcraze, to talk about development, share what you’ve been doing and even possibly hack together! Be sure to say hi if you’re there. We will try to make it something similar to a Swedish fika, with some sweets and coffee, but we can’t promise that there will be kanelbullar.
IROS Safe Robot Learning Competition
And this year, we’re happy to announce that there will be a Crazyflie competition during IROS. The goal is to develop safe learning-based algorithms that can cope with uncertainties not known at design time. Our friends at Dynamic Systems Lab are organizing this competition with two simulated phase, and one experimental phase at IROS… And the experiment is a remote access to the Flight Arena at the University of Toronto Institute for Aerospace Studies in Toronto, Canada via high-speed internet connections. You don’t need to be present at IROS to participate, but if you wish to do so, beware, the registration for the competition ends on October 12th. We’re really curious and excited to see what this competition is going to show!
What about Bitcraze during that week?
But, if everybody is in Japan, what about Bitcraze’s regular activities ? You may be wondering. Well, no worries. Even though we’re going to be half a world away, the business is going to follow us. Of course, some of us are going to take that opportunity to take some vacations and visit this beautiful country, so during IROS’ week and the week after, the company will run a little bit more slowly than usual. We won’t be as reactive as usual on emails and discussions, but we will still monitor our emails and ship some orders.
Are you planning to visit IROS or ROSCon ? Is there anything in particular in the schedule that you don’t want to miss ? Don’t hesitate to tell us if you want to join the meetup !
Last week we went on a nice trip to Delft, The Netherlands to attend the 22th International Mico Aerial Vehicle Conference and Competition, this time organized by the MAVlab of the TU Delft. Me (Kim), Barbara and Kristoffer went there by train for our CO2 policy, although the Dutch train strikes did made it a bit difficult for us! Luckily we made it all in one piece and we had a great time, so we will tell you about our experiences… with a lot of videos!
First Conference day
For the conference days we were placed in the main aula building, so that everybody could drop by during the coffee breaks, right next to one of our collaborators, Matěj Karásek from Flapper Drones (also see this blog post)! In the big lecture hall paper talks were going on, along with interesting keynote speeches by Yiannis Aloimonos from University of Maryland and Antonio Franchi from TU Twente.
In between the talks and coffee breaks, we took the opportunity to hack around with tiny demos, for which the IMAV competition is a quite a good opportunity. Here you see a video of 4 Crazyflies flying around a Flapperdrone, all platforms are using the lighthouse positioning system.
The Nanoquadcopter challenge
The evening of the first day the first competition was planned, namely the nanoquadcopter challenge! In this challenge the goal was to autonomously fly a Crazyflie with an AIdeck and Flowdeck as far as possible through an obstacle field. 8 teams participated, and although most did offboard processing of the AIdeck’s camera streaming, the PULP team (first place) and Equipe Skyrats (3rd place) did all the processing onboard. The most exciting run was by brave CVAR-UPM team that managed to do pass through 4 gates while avoiding obstacles, for which they won a Special Achievement Award.
During the challenge, Barbara also gave a presentation about the Crazyflie while Kristoffer build up the lighthouse positioning system in the background in a record breaking 5 minutes to show a little demo. After the challenge, there were bites and drinks where we can talk with all the teams participating.
Here there is an overview video of the competition. Also there was an excellent stream during the event if you would like to see all the runs in detail + presentations by the teams, you’ll have have a full 3 yours of content, complemented by exciting commentary of Christophe de Wagter and Guido de Croon from the MAVlab. Thanks to all the teams for participating and giving such a nice show :)
The overview video
The full stream of the nanoquadcopter challenge
The Green House Challenge
On Wednesday, we were brought to Tomato world, which is a special green house for technology development in horticulture. Here is where the Greenhouse challenge, which was the 2nd indoor drone competition took place. The teams had to participate with their drone of choice to navigate through rows of tomato plants and find the sick variant. Unfortunately we could not be up close and personal as with the nanoquadcopter challenge, but yet again there was a great streaming service available so we were able to follow every step of the way, along with some great presentations by Flapper drones and PATS! drones among others. For the later we were actual challenged to an autonomous drone fight! Their PATS-x system is made and detect pest insects that are harmful for green house crops, so they wanted to see if they can catch a Crazyflie. You can see in the video here that they manage to do that, and although the Crazyflie lived, we are pretty sure that a real fly or moth wouldn’t. Luckily it was a friendly match so we all had fun!
PATS versus Crazyflie battle
Here is an overview of the Green house challenge. At the end you can also see a special demo by the PULP team successfully trying out their obstacle avoiding Crazyflie in between the tomato plants. Very impressive!
Last days and final notes
Due to the planned (but later cancelled) train strikes in the Netherlands, the full pack were not able to attend the full event unfortunately. In the end Barbara and I were able to experience the outdoor challenge, where much bigger drones had to carry packages into a large field outdoors. I myself was able to catch the first part of the last conference day, which included a keynote of Richard Bomprey (Royal Veterinary College), whose lab contributed to the mosquito-inspired Crazyflie flight paper published in Science 2 years ago.
We were happy to be at the IMAV this year, which marks as our first conference attendance as Bitcraze after the pandemic. It was quite amazing to see the teams trying to overcome the challenges of these competition, especially with the nanoquadcopter challenge. We would like to thank again Guido de Croon and Christophe de Wagter of the MAVlab for inviting us!
Bolt DSHOT support for ESCs configurable via Kconfig
ESC pass-though configuration via USB (virtual COM port)
For more information (and files for the release) see the release notes and files on GitHub, the releases of the different projects are listed below. As always, we’re really eager to get feedback, so let us know if you try it out and how it works!
This weeks guest blog post is from Hanna Müller, Vlad Niculescu and Tommaso Polonelli, who are working with Luca Benini at the Integrated Systems Lab and Michele Magno at the Center for Project-Based Learning, both at ETH Zürich. Enjoy!
This blog post will give you some insight into our current work towards autonomous flight on nano-drones using a miniaturized multi-zone depth sensor. Here we will mainly talk about obstacle avoidance, as it is our first building block towards fully autonomous navigation. Who knows, maybe in the future, we will have the honor to write another blog post about localization and mapping ;)
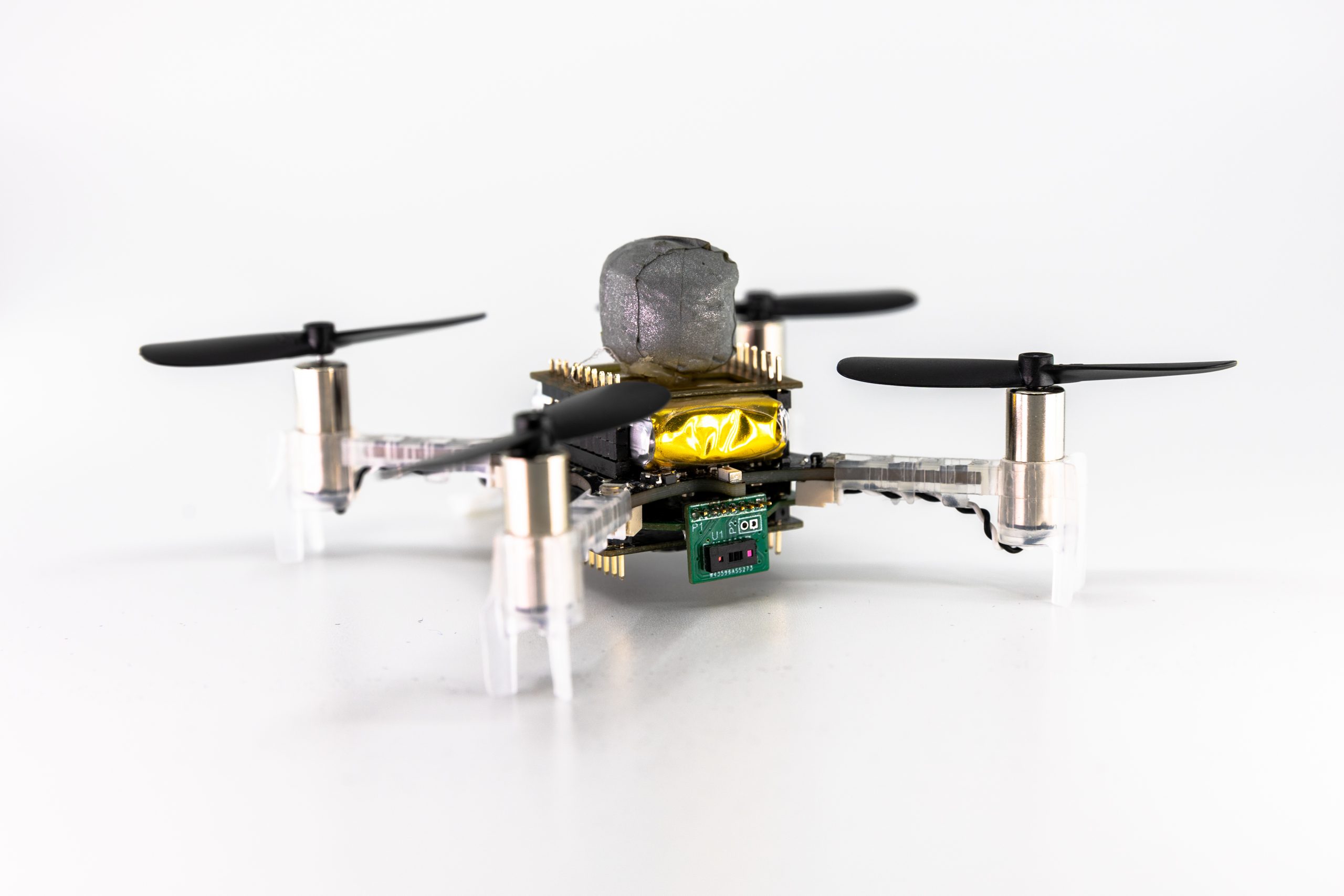
A Crazyflie 2.1 with our custom multi-zone ToF deck, a flow deck and a vicon marker.
Obstacle avoidance on nano-drones is challenging, as the restricted payload limits on-board sensors and computational power. Most approaches, therefore, use lightweight and ultra-low-power monocular cameras (as the AI-deck) or 1d depth sensors (as the multi-ranger deck). However, both those approaches have drawbacks – the camera images need extensive processing, usually even neural networks to detect obstacles. Neural networks additionally need training data and are prone to fail in completely new scenarios. The 1d depth sensors can reliably detect obstacles in their field of view (FoV); however, no information about the size or exact position of the obstacle is obtained.
On bigger drones, usually lidars or radars are used, but unfortunately, due to the limited weight and power consumption, those cannot be carried and used on nano-drones. However, in 2021 STMicroelectronics introduced a new multi-zone Time-of-Flight (ToF) sensor – with maximal 8×8 pixel resolution, a range up to 4m (according to the datasheet), a small form-factor and low power consumption of only 286mW (typical) it is ideal to use on nano-drones.
In the picture on top, you can see the Crazyflie 2.1 with our custom ToF deck (open-sourced at https://github.com/ETH-PBL/Matrix_ToF_Drones). We described this deck for the first time in [1], together with a sensor characterization. From this, we saw that we could use the sensor in different light conditions and on different colored obstacles, but from 2m on, the measurements started to get incomplete in all scenarios. However, as the sensor can detect invalid measurements (due to interference or obstacles being out of range), we can still rely on our information. In [2], we presented the system and some steps towards obstacle avoidance in a demo abstract, as you can see in the video below:
The next thing we did was to collect a dataset – we flew with different combinations of decks (flow-deck v2, AI-deck, our custom multi-zone ToF deck) and sometimes even tracked by a vicon system. Those recordings amount to an extensive dataset with depth images, RGB images, internal state estimation and the position and attitude ground truth.
We then fed the recorded data into a python simulation to develop an obstacle avoidance algorithm. We focused on only the ToF data (we are not fusing with the camera in this project, we just provide the data for future work). We aimed for a very efficient solution – because we want it to run on-board, on the STM32F405, with low latency and without occupying too many resources. Our algorithm is very lightweight but highly effective – we divide the FoV in different zones, according to how dangerous obstacles in those areas are and then use a decision tree to decide on a steering angle and velocity.
With only using up 0.31% of the computational power and 210 μs latency, we reached our goal of developing an efficient obstacle avoidance algorithm. Our system is also low-power, the power to lift the additional sensor with all accompanying electronics as well as the supply of it totals in less than 10% of the whole drone. On average, our system reaches a flight time of around 7 minutes. We refer to our preprint [3] for details on our various tests – they include flights with distances up to 212 m and 100% reliability and high agility at a low speed in an office environment.
As our paper is currently submitted but not yet accepted our code and dataset are not yet released – however, the hardware design is already accessible: https://github.com/ETH-PBL/Matrix_ToF_Drones
[1] V. Niculescu, H. Müller, I. Ostovar, T. Polonelli, M. Magno and L. Benini, “Towards a Multi-Pixel Time-of-Flight Indoor Navigation System for Nano-Drone Applications,” 2022 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), 2022, pp. 1-6, doi: 10.1109/I2MTC48687.2022.9806701. [2] I. Ostovar, V. Niculescu, H. Müller, T. Polonelli, M. Magno and L. Benini, “Demo Abstract: Towards Reliable Obstacle Avoidance for Nano-UAVs,” 2022 21st ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), 2022, pp. 501-502, doi: 10.1109/IPSN54338.2022.00051. [3] H.Müller, V. Niculescu, T. Polonelli, M. Magno and L. Benini “Robust and Efficient Depth-based Obstacle Avoidance for Autonomous Miniaturized UAVs”, submitted to IEEE, preprint: https://arxiv.org/abs/2208.12624
Before the summer vacations, I had the opportunity to spend some time working on AI deck improvements (blog post). One of the goals I set was to get CRTP over WiFi working, and try to fix issues along the way. The idea was to put together a small example where you could fly the Crazyflie using the keyboard and see the streamed image along the way. This would require both CRTP to the Crazyflie (logging and commands) as well as CPX to the GAP8 for the images. Just before heading off to vacation I managed to get the demo working, this post is about the results and som of the things that changed.
Link drivers
When using the Crazyflie Python library you connect to a Crazyflie using a URI. The first part of the URI (i.e radio or usb) selects what link driver to use for the connection. For example radio://0/80/2M/E7E7E7E7E7 selects the radio link driver, USB dongle 0 and communication at 2Mbit on channel E7E7E7E7E7.
While working on this demo there were two major things changed in the link drivers. The first one was the implementation of the serial link (serial://) which is now using CPX for CRTP to the Crazyflie. The usecase for this link driver is to connect a Raspberry Pi via a serial port to the Crazyflie on a larger platform.
The second change was to add a new link driver for connecting to the Crazyflie via TCP. Using this link driver it’s possible to connect to the Crazyflie via the network. It’s also possible to get the underlying protocol, the CPX object, for using CPX directly. This is used for communicating with for example the GAP8 to get images.
In the new TCP link driver the URI starts with tcp:// and has either an IP or a host name, followed by the port. Here’s two examples:
tcp://aideck-AABBCCDD.local:5000
tcp://196.168.0.100:5000
Comparison with the Crazyradio PA
So can WiFi be used now instead of the Crazyradio PA? Well, it depends. Using WiFi will give you larger throughput but you will trade this for latency. In our tests the latency is both larger and very random. In the demo I fly with the Flow V2 deck, which means latency isn’t that much of an issue. But if you were to fly without positioning and just use a joystick, this would not work out.
The Demo!
Below is a video of some flying at our office, to try it out yourself have a look at the example code here. Although the demo was mostly intended for improving CPX, we’ve made use of it at the office to collect training data for the AI deck.
The Crazyflie with AIdeck during over WiFI controlled flight.
Improvements
Unfortunately I was a bit short on time and the changes for mDNS discovery never made it it. Because of this there’s no way to “scan” or discover AI decks, so to connect you will need to know the IP or the host name. For now you can retrieve that by connecting to your AI-deck equipped Crazyflie with the CFclient and look at the console tab.
A part from that there’s more improvements to be made, with a better structure for using CPX (more like the CRTP stack with functions) in the library and more examples. There’s also still a few bugs to iron out, for example there’s still the improved FPS and WiFi throughput issues.
IMAV 2022
Next week from 13th to 16th of September Barbara, Kristoffer and Kimberly will be present at the international Micro Aerial Vehicle Conference and Competition (IMAV) hosted by the MAVlab of the TU Delft in the Netherlands. One of the competitions is called the nano quadcopter challenge, where teams will program a Crazyflie + AI deck combo to navigate through an obstacle field, so we are excited to see what solutions will come out of that. If any of you happens to be at the conference/competition, drop by our table to say hello!
you had probably seen me from the last blog post when I first arrived. I spent this summer working here in Malmö and I can definitely say that it was one great, educative and fun experience. During the last three months I have been in Bitcraze, I was given the chance to work and develop applications and demos on the robotics subject I am most interested in, drone collaboration.
Centralized Swarm with Multiple Flying Copter
I initially started looking into the implemented swarm demo which had 7 drones charging wirelessly in 7 charging decks and one of them flying by executing a spiral trajectory until it has a low battery and another one takes its place. The original swarm demo was shown at several conferences before the pandemic hit, but my plan was to improve it by adding more quadcopters flying simultaneously. The biggest problem was the collisions and ground effect happening between them. In order to solve that I was based on this paper and the optimization engine OpEn. I solved the problem of all drones starting from a point and going to a final one without colliding and covering the minimum distance by transferring these constraints into a cost function of an optimization problem assuming a simplified model for the quadcopter. Its output is waypoints for each quadcopter to pass from. These waypoints are transformed into a trajectory(piecewise polynomial) by a custom trajectory generator based on linear algebra.
In this way, I made it possible to execute non-colliding trajectories for 4 quadcopters, upload and execute them. While executing the first trajectory, the next one was being calculated and uploaded assuming the goal of the previous one as starting point. In this way, I managed to have 4 Crazyflies flying simultaneously and landing when their battery was running out and the fully charged ones were taking their place. This mechanism with some modifications can be used as a path planner or a standalone trajectory generator from a future user by feeding it waypoints and time durations for each waypoint segment. You can find the source code here.
Decentralized Swarm with Multiple Flying Copters
The aforementioned setup seemed to work pretty well but there was always the need of having a central PC monitoring and taking decisions for the whole swarm. So we wanted to move the architecture to a decentralized one, of which Kristoffer did some preliminary work shown at BAMdays last year. This was made possible by utilizing the onboard peer-to-peer protocol (P2P) in collaboration with the onboard collision avoidance algorithm introduced in this PR contributed by James Preiss from the University of Southern California. All the Crazyflies share their position and state through the protocol by broadcasting them at a rate of 15 Hz.
Although there were some missed packets, they could avoid each other while flying by updating the collision avoidance algorithm which is taking action between the high level and the action commander by altering its waypoints. The decisions of which drone should take off or land are also taken in a decentralized way. Whenever one copter is about to take off it enters the corresponding state and assigns itself a randomized timeout. During this timeout, if the desired number of airborne copters is achieved it goes back to idle. If not and the timeout occurs it finally take-offs. So, despite there is not an actual common decision, the swarm can be led to simple desired states like keeping the number of the drones flying constant and executing changes between the landed, charged copters and flying ones. You can find the source code here.
Token Ring Implementation
After I finished this project and since I had some extra time left I decided to work more in the P2P protocol. The need for having a robust way to communicate between the Crazyflies and a way to verify that a packet was indeed sent was obvious. A solution to this problem was offered by Christos Zosimidis and Klaus Kefferpütz from the Cooperative Control Lab in Hochschule Augsburg, namely a token ring implementation. I would really like to thank them for this collaboration and hope for future ones as well.
Specifically, the proposed token ring protocol was implemented in a modified version of the nrf-radio firmware and the Crazyradio. This protocol assumes that each Crazyflie is a node of a network and a token is passed around giving permission to each drone that has it in its possession to broadcast data. So, each time only one Crazyflie broadcasts data which leads to fewer packet collisions and losses. It can also acknowledge that a node has received the data targeting to it and then continues to others. The interface with the protocol is being done by 2 queues (TX and RX) where the user can place data that wants to send and read the RX queue to receive. The moment that this blog post is being written only the static version of it is public in the firmware, which means that the number and the id of the Crazyflies must be defined before execution and in case a copter fails the whole network fails. Although, I am currently working on a dynamic approach that is going to solve these problems
All in all, I had a great time here in Malmo despite the fact that the Swedish summer is much colder than the warm weather I was used to in Greece. I was amazed by the way things in Bitcraze work and how the whole company operates. It was a pleasure being around so creative people and I am happy that I could help even in a small way. Thank you very much for giving me the opportunity to work with you and I hope I will keep on contributing to this amazing project in the future.
After a period of bitcrazer-vacations, we are now all back at work. The summer here in Sweden has generally been great. Some of us stayed here to keep the company afloat, and some just stayed afloat on lakes or the sea. The majority vacationed inside of Sweden, but some (could you guess who?) have visited France, Italy, or Greece. We’ve been lucky with a mostly warm and sunny weather, perfect for bathing and grilling. And even though it’s nice to enjoy real summer, it’s still worrying sign though, as Europe is experiencing what could be the worst drought in 500 years.
Crazyflie 2.1 back in stock
What is also back is the Crazyflie 2.1, but back in stock, yay! After almost two weeks without any drones available for sale, we received a new batch of our quadcopter today. It should now be available in the shop, just in time for when school starts!
We got some indications the component shortage are slowly moving in the right direction so hopefully it will get easier to keep things in stock in the future. We are keeping our fingers crossed.
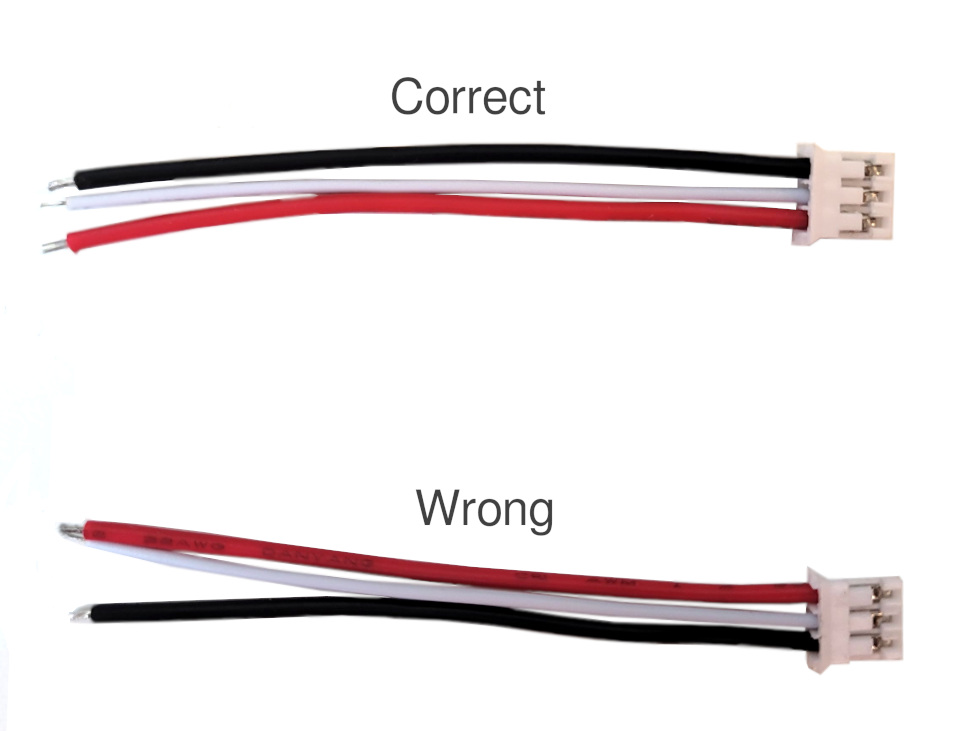
Bolt 1.1 ESC cable red/black switched
Unfortunately we recently found out that there has been a manufacturing error with the ESC cables that come with the Bolt 1.1. The black and red cables have been switched. Please see the image below.
With the black and red cables switched this will result in powering your ESCs with reversed polarity. This will most likely burn the MOSFET on the Bolt that controls the power to the ESC, which is the weakest link. This because the MOSFET body diodes on the ESC will conduct and make the whole ESC a short circuit. In many setups, e.g using 4in1 ESC these cables are not used though and will not cause a problem.
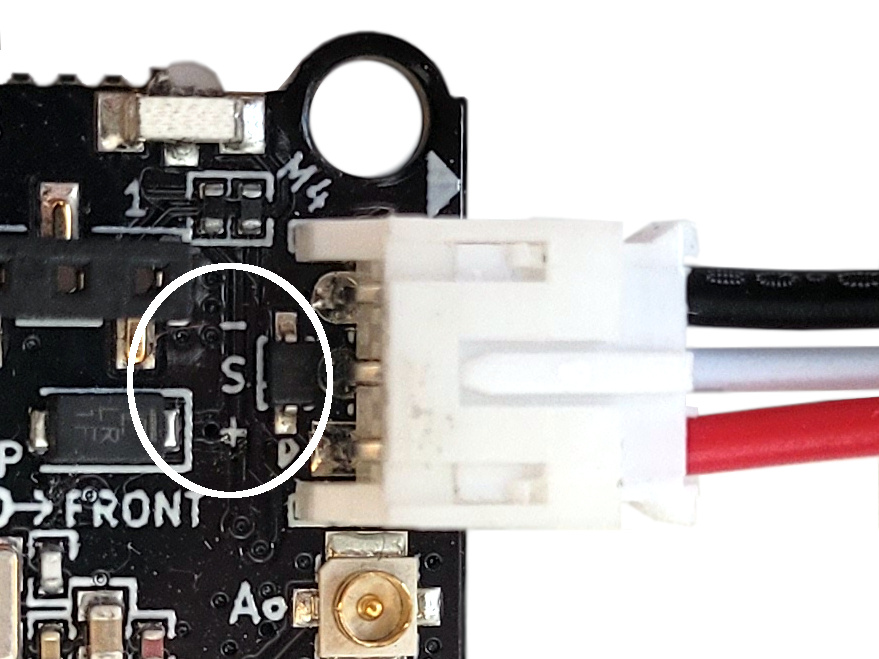
Switching the cables back is quite easy to do. Use a needle, tweezer or e.g. small screwdriver to open the plastic lock so the cable can be pulled out. Switch the black and red and you are done. You can double check that the colors are correct by comparing it with the Bolt 1.1 board. The plus and minus should match with the red and black as per the image below:
We are currently working with the manufacturer to get correct cables. If you got a Bolt 1.1 (anytime between June and August 2022) we can of course ship you correct cables once they are ready or give you support if you got problems with the control board. If so, please send us an email to support@bitcraze.io. Sorry for this inconvenience!
There are some nice and exciting improvement in the CF-client that we worked on during the summer months! First of all we worked on a toolbox structure, where every tab can be reconfigured as a toolbox as well, allowing it to be docked to the sides of the window. Secondly we have added a new geometry estimation wizard for Lighthouse systems to support multi base-station estimation. Finally we have added a new tab for PID controller tuning, mainly intended for the Bolt.
New tabs, toolboxes and wizards for the CFclient
Toolboxes in the CFclient
Everyone who used the CFclient has experienced the tabs before. Anytime you want to configure the lighthouse system, setup plotting or look at the parameter states, you switch to the appropriate tab to perform your desired action. This is all fine, but sometimes it can be useful to see the contents of two tabs at the same time, maybe you want to watch the graphing of a log variable at the same time as you change a parameter. This is what the combined tab/toolbox feature adds! Any tab can now be converted into a toolbox that can be docked to the side of the window.
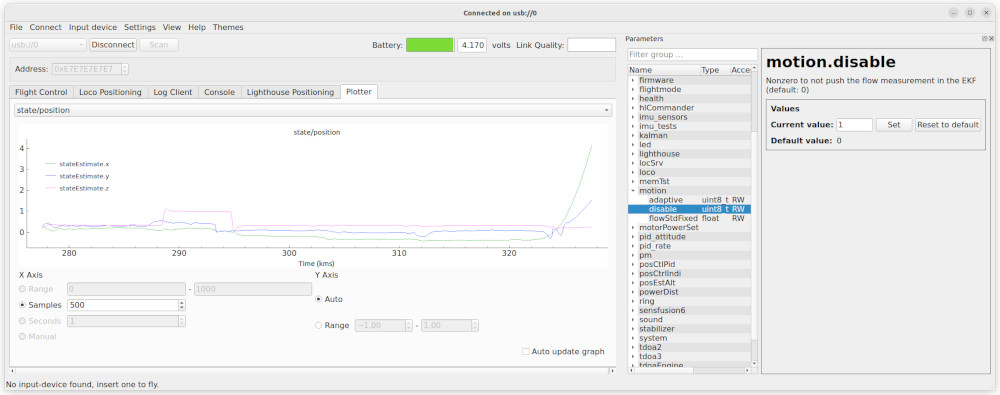
Plotter tab with parameter toolbox
In the example above the plotter is displaying the estimated position of a Crazyflie with a Flow deck, while the parameter window is opened as a toolbox. The “motion.disable” parameter was just set to true and we can see that the kalman estimator gets into trouble when it no longer gets data from the flow deck.
To switch from tab to toolbox mode, go to the View/Toolboxes menu and select the window that you want to show as a toolbox. In a similar way, use the View/Tabs menu to turn it back to a tab.
Even though all tabs can be turned into toolboxes, some of them might still look better as tabs due to their design. We hope to be able to improve the design over time and make them more toolbox friendly, contributions are welcome!
Lighthouse Geometry Estimation Wizard
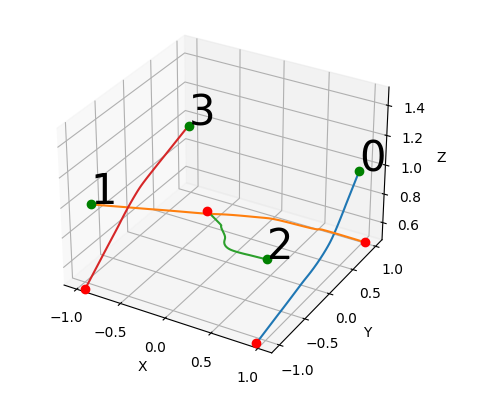
In a blogpost of almost a half year ago, we presented a new multi base station geometry estimation method that enabled the user to include more than 2 base station for flying a Crazyflie. This heavily increases the flight area covered by the base station V2s, as technically it should be able to handle up to 16!
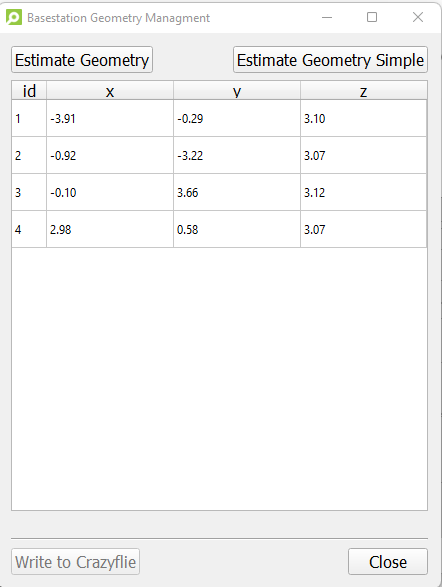
New geometry estimation dialog
However, up until this summer it has been in experimental mode as we weren’t so sure as how stable this new estimation method is, so the only way to use it was via a script in the Crazyflie python library directly, and not from the CFclient. Since we haven’t heard of anybody having problems with this new experimental feature, we decided to go ahead to make a nice multi base station geometry estimation wizard in the CFclient’s Lighthouse tab.
This wizard can be accessed if you go to the lighthouse tab-> ‘manage geometry’ and press ‘Estimate Geometry’. We had to make it a wizard as this new method requires some extra intermediate steps compared to the previous, to ensure proper scaling, ground plane setting and sweep angle recording. If you are only using 2 base stations this seems like extra effort, where you only had to put the Crazyflie on the ground and push a button, but if you compare flight performance of the two methods, you will see an immediate difference in positioning quality, especially around the edges of your flight area. So it is definitely worth it!
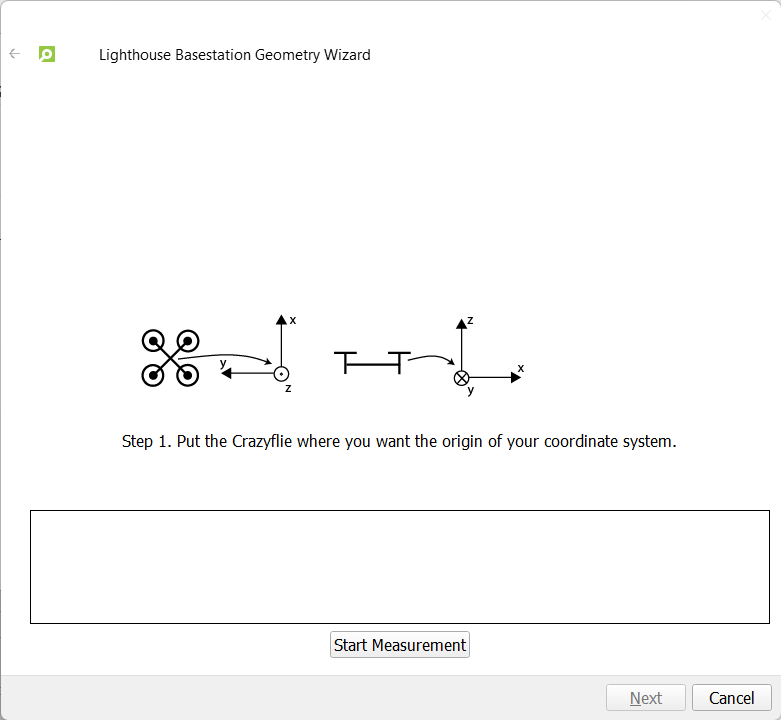
First page of the wizard
We will still provide the “simple” option for those that want to use it, or want to geometry estimate only one base-station, as we don’t have support for that for this new estimator (see this issue). In that case, you will have to install the headless version of opencv separately like ‘pip3 install opencv-python-headless’. We will remove this requirement from the cflib itself for the next release as there are conflicts for users who has installed the non-headless opencv on their system, like for the opencv-viewer of the AI-deck’s wifi streamer for instance.
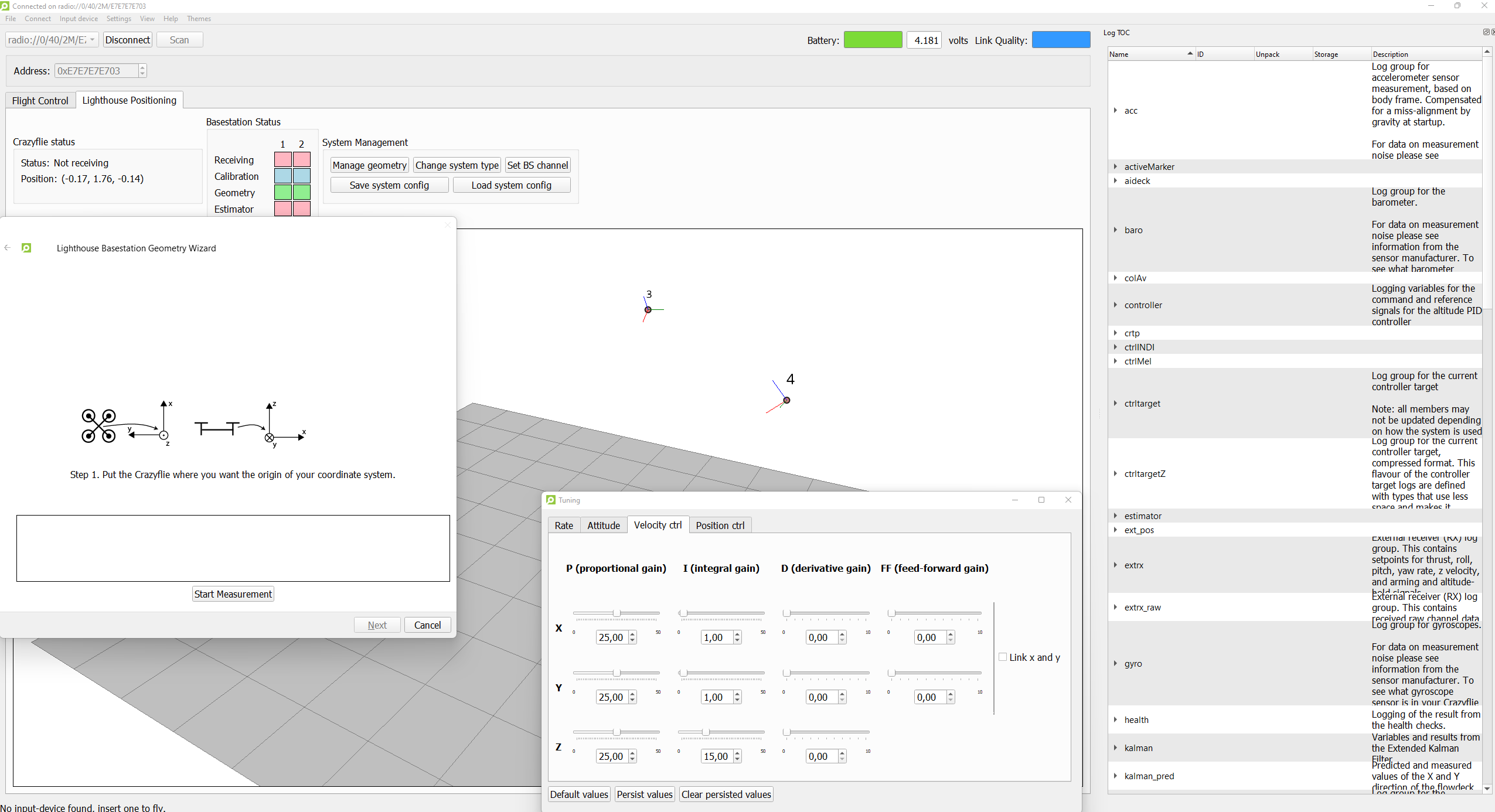
PID tuning tab
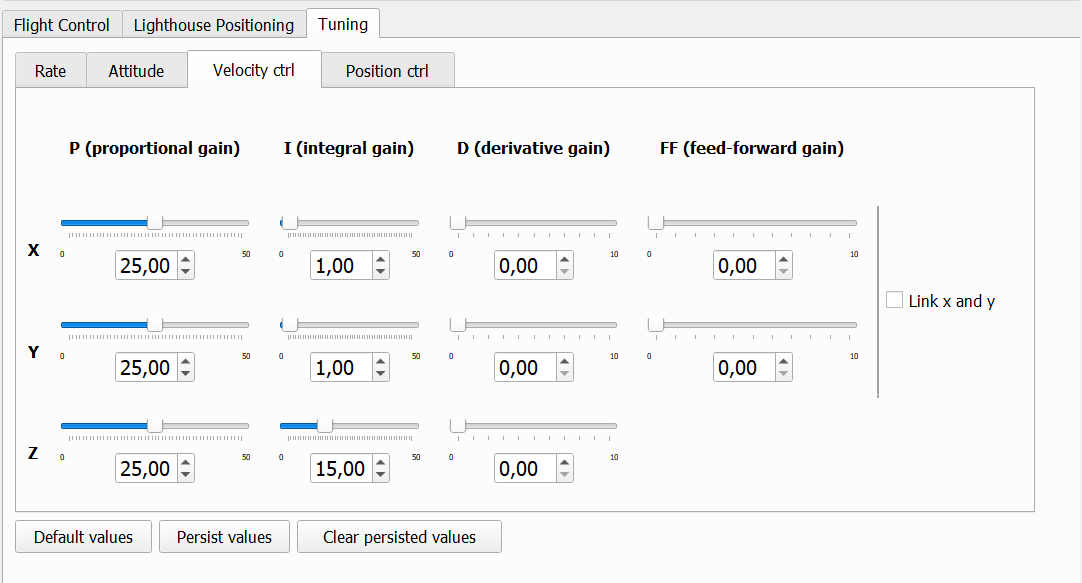
The PID controller tuning tab
And last but not least, we introduced an PID tuning tab in a PR in the CFClient! And of course… also available as a toolbox :) This is maybe not super necessary for the Crazyflie itself, but for anyone working with a custom frame with the Bolt or BigQuad deck this is quite useful. Tuning is much handier with a slider than to adjust each parameter numerically with the parameter tab. Also if you are just interested of what would happen if you would increase the proportional gain of the z-position controller of the crazyflie, this would be fun to try as well… but of course at your own risk!
If you are happy with your tuned PID values, there is the “Persist Values” button which will store the parameters in the EEPROM memory of the Crazyflie/Bolt, which means that these values will persist even after restarting the platform. This can be cleared with the ‘Clear persisted values’ button and you can retrieve the original firmware-hardcoded default values with ‘Default Values’ button. Please check out this blogpost to learn more about persistent parameters.
Try it out for yourself!
This client has not been released yet but you can already go ahead and try these new features out for yourself. Make sure to first install the client from source, and then install the CFlib from source, as an update of both is necessary. Also update the crazyflie-firmware to the latest development branch via these instructions, especially if you want to try out the new LH geometry wizard.
And of course, don’t forget to give us feedback on discussions.bitcraze.io or to make an issue on the cfclient, cflib or crazyflie-firmware github repositories if you are hitting a bug on your machine and you know pretty precisely where it comes from.