A long time ago we got a request for a bright LED deck from a community member. When working with high powered leds heat becomes a problem that needs to be taken into account. From the community member we got suggestions of using one of the luxeon rebel leds and so we did. We designed a prototype pretty quickly but also realized that it is a bit harder than we first thought. If using a simple control scheme such as PWM and a mosfet the circuit is simple but brightness will be effected by battery voltage. Using a dedicated LED driver the brightness would be stable but the circuit more complicated and expensive. Trying to list the pros and cons:
MOSFET
+ Low complexity
+ Low cost
+ High efficiency
– varying brightness depending on battery voltage
– Might stress LED (could be solved with low ohm resistor)
LED driver
+ Stable brightness
+ Not as high efficiency (~80%)
– Higher cost
– Higher complexity
We ended up trying booth. The LED driver design failed due to that the battery voltage needed to be lower than the LED voltage + schottky and it is just in the middle. The PWM design half failed since the LED anode and cathode was swapped in the design but was possible to patch afterward. So at least we got something up and running.
The effect is very nice and it is what we used for the wedding show. The question now is, is this something we should finish and put in the store?
It was inevitable. At some point we needed to do a drone show of our own and wouldn’t the best occasion be on one of our coworkers wedding party! Well we have done demos before on maker fairs and conferences but never a one time show. This time we also had the possibility to collaborate with an acrobat, namely Arnauds brother, Adrien. Perfect match! The only problem was that we only had one day to pull something off and no possibility to rehearse anything with Adrien before the live show. Probably a piece of cake for a true artist such as Adrien but for newbies like us it was definitely increasing the stakes. There was no time to wank about that but better to get our hands dirty.
We wanted to create a choreography with a Crazyflie interacting with Adrien as he did some awesome acrobatics. The Crayzflie should be clearly visible with lights and we wanted it all to be synchronized to music. The final requirement was to minimize the equipment required since the wedding was abroad and we did not want to carry too much equipment.
We decided to use the Loco positioning system as a base to be able to do scripted flight and chose Two Way Ranging to reduce the number of anchors needed. We used only four anchors arranged as a 3×3 m square, three of them on the floor and the fourth 1.5 meters up on a tripod. Two Way Ranging works very well outside of the convex hull (which is really small in this case) but with the drawback that we only could position one Crazyflie – no swarm show.
For the visibility we used a prototype deck with a high intensity LED pointing downwards.
Again to minimize the equipment we decided to pre-program the sequence in the Crazyflie and put a start button on it to run the sequence. The piece of music to be used (composed by the groom during the bachelor party) was about one and a half minute long and the idea was to start the music and the sequence manually at exactly the same time and let them run without any further synchronisation.
We based our purpose built firmware on the demo code from ICRA earlier this year. It contained the sequencing but we had to add functionality to control the LED. We wrote a python script that generated data for the sequence that could be pasted into the firmware. A button was soldered on top of the Loco Positioning Deck and connected to a GPIO pin to be used as a start button.
We are engineers and not choreographers but after some trial and error we managed to create a sequence with light that was synchronized to the music. The overall idea was to start the Crazyflie on the floor in the center of the space, go out into the audience during the intro and turn on the light over Adrian (that was carefully positioned on the correct spot) and guide him onto the “stage”. While Adrien improvised acrobatics on the floor the Crazyflie circled around and above him with flashing lights. At the end of the music the procedure was reversed and the Crazyflie guided him back into the crowd and landed quietly in the center of the stage.
After dinner when it was time for the show we set up the positioning system and the crowd gathered. The first two attempts failed as it turned out that the ceiling of the venue was lower than expected and the Crazyflie hit a beam! What to do? We had a pre-programmed sequence that was going too high! We simply moved the anchors 30 cm away from each other and “stretched” the space to trick the Positioning system a bit. We had not tried this before and live hacking is a bit stressful, but we were possibly strengthened by one or two glasses of wine :-)
The third attempt was almost perfect with an incredible performance by Adrien! Phhuuu and what a success on the third attempt. Heart failure was close but did not kill us this time! :-) Maybe this is why we stay away from live shows and rather sitt down in a dark basement coding :-).
At any given time we have a bunch of deck ideas floating around. Some of them might not be doable (or very hard), but still fun to discuss. Other we just never get around to since we’re always pressed for time. The “obstacle avoidance” deck is one of the latter ones.
The idea with the “obstacle avoidance” deck (current working name in lack of imagination) is to mount one of the VL53L0x ToF distance sensors, the same we have on the Z-ranger and the Flow deck, in each direction. This would allow you to keep a distance to the ground, avoid the walls (or any other obstacles you might fly into) and also keep away from the ceiling. Basically you could do a “turtle bot” that just flies around randomly without crashing. Another fun idea we’ve been discussing is being able to SLAM the room you’re flying in. If you can keep track of how you are moving around (with the Flow deck, Loco positioning system or any other means) while you’re measuring the distance on all sides you could make a map of the room.
After discussing this on and off for a some time, mainly focusing on mechanical and production issues of the design, we decided to just try out the concept with a simple prototype. The prototype, named “OA”, has daughter boards with VL53L0x sensors mounted front/back, left/right as well as one sensor facing up. It’s designed to be mounted on the top of the Crazyflie 2.0 and combined with the Flow deck which will give relative movement and also the sixth direction, distance to the floor. One of the issues with the design is that all the VL53L0x sensors are on the same I2C bus with the same address. To work around this the sensor has a nifty feature where you can re-program the I2C address. For this to work you need to release the reset of the sensors one by one: release the first reset, reprogram the address and then release the reset of the next sensor. The reset for the VL53L0x is not cabled on the Flow deck, so this is the first to be re-programmed. Then the reset will be released one-by-one for the sensors on the OA deck. In order to control the reset pins on the deck there’s a 8bit I2C GPIO expander. The reason for the GPIO expander is to use as few GPIOs on the deck connector as possible to keep the compatibility with other decks high. For instance the deck will work fine with the Loco positioning deck.
The goal with the prototype is to try out the concept of the deck and to see if it’s feasible. A few of the things we need to sort out is:
Mechanical solution for side senors (front, back, left and right)
Interference between sensors
Update rate when we have 6 sensors on the same bus which we might have to run one-by-one to avoid interference
The current status is that we’ve verified the electronics and written the I2C GPIO expander drivers to test all the sensors. The next step is to work on a new VL53L0x driver to allow multiple sensors running at the same time, which will force some refactoring of the firmware. Once we’ve made some more progress we’ll do another post and report the results. If you have any feedback on the design/concept or have any ideas of what the deck could be useful for, don’t hesitate to drop a comment below.
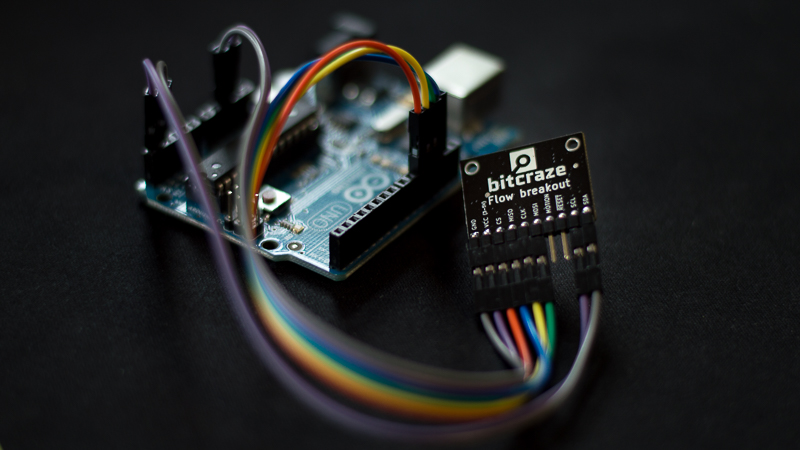
The idea is that we can detect the proximity of the hand with the ranging sensor contained in the flow breakout and detect how the hand is moving with the optical flow sensor. The flow sensor is very similar to an optical mouse sensor so we are just inverting the concept to move the environment (the hand) instead of moving the flow sensor against a table. Using an Arduino Leonardo our hack is recognized as a regular mouse by any computer.
As a result, it works quite well but it requires some training to get the mouse to go where we want. We would not use this as our regular pointing device any time soon but we think is a nice example of what can be achieved with the flow breakout board:
The Flow breakout board is built around the Pixart PMW3901 optical flow tracking sensor and the ST VL53L0x ranging sensor and measures motion in 3 dimensions. We have used the same sensors in the Flow deck which is used by the Crazyflie drone for autonomous flight, but we thought that the functionality is so awesome that we developed the Flow breakout and made it compatible with Arduino to make it easy to use. With the Flow breakout it is possible create applications such as motion tracking of a robot, counting people entering a room or gesture tracking.
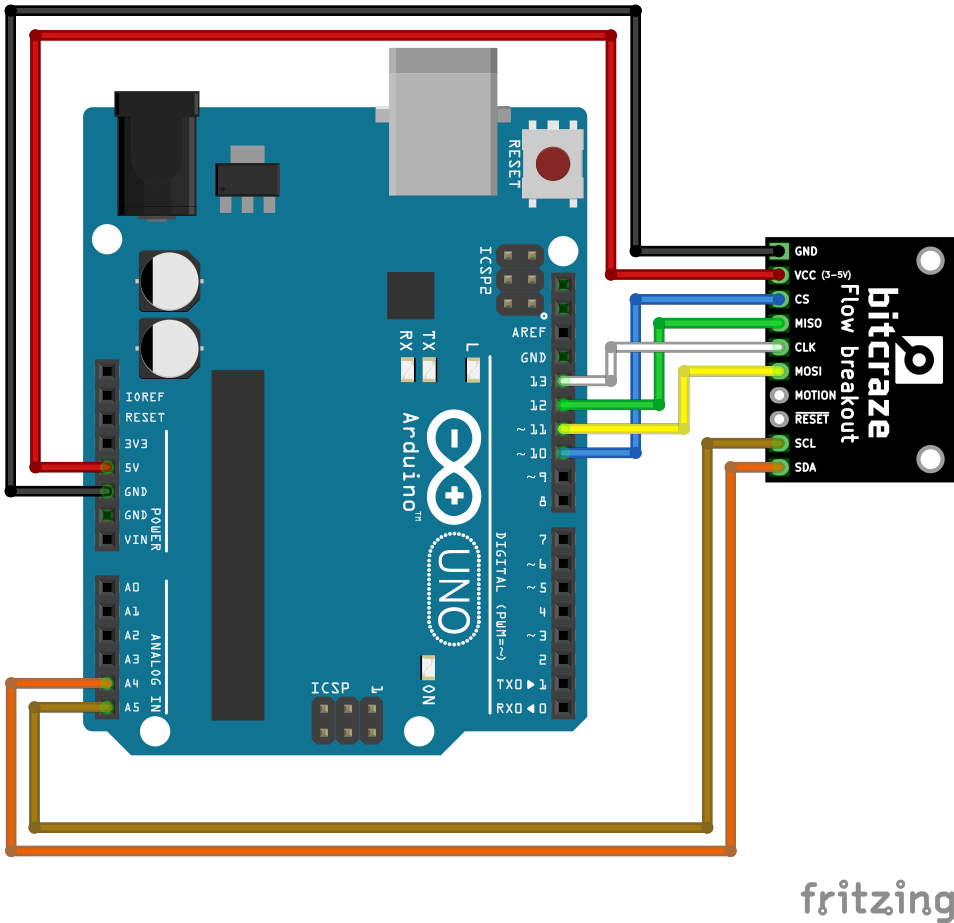
When you get your Flow breakout, follow the getting started guide to quickly get up and going by hooking it up to an Arduino and measure motion.
In the following weeks we are going to make a couple of Hackster project around the Flow breakout board so stay tuned for more motion tracking!
We have had an implementation of a Time Difference of Arrival algorithm (TDoA) in the Crazyflie 2.o and the Loco Positioning System for quite a long time. The coolest feature of the TDoA algorithm is that it can be used to position virtually unlimited number of Crazyflies concurrently as opposed to the standard Two Way Ranging algorithm that is limited to one (or very few Crazyflies). The original implementation is working pretty well but contains some flaws that we are not completely happy with, hence we have not released it officially and are still calling it experimental. Since support for tracking multiple objects is a requirement for flying swarms and we like swarms, we have started to iron out the problems.
A small swarm using the old TDoA algorithm, from February 2017.
In the current implementation each anchor transmits the time of the transmission and the times of the latest reception of transmissions from all other anchors about every 16 ms. From this information it is possible to calculate the difference in time of flight for the radio waves from two anchors to the Crazyflie. When we know the difference in time of arrival, by multiplying with the speed of light we get the difference in distance and can calculate the position of the Crazyflie. This all sounds fine and dandy but the set up has some problems, the biggest one being error handling. If one or more packets are lost, either from anchor to Crazyflie or anchor to anchor, there is no deterministic way to detect it in some cases. The current algorithm relies on sanity checking the calculated result and discarding data that looks suspicious, which is usually easy as the distances quickly gets unrealistic (several thousands of meters!). We suspect that some erroneous values slip through the check though and we would like to be able to really understand when data is valid or not.
TDoA 2.0
What we are working on now is to add a sequence numbering scheme to enable the receiving party to understand when a packet has been lost. With this information it will be possible to discard bad data as well as use the available information better. While we are re-writing the code we are also moving a part of the algorithm from the Crazyflie to the anchors, after all there is a CPU in the anchors that is not fully utilized. The idea is to let each anchor continuously calculate the distance to all other anchors and add this information to the messages it transmits, which will reduce the work in the Crazyflie.
This is work in progress and we are not completely sure where we will end up, but we are aiming at making the TDoA mode part of the official release at some point.
Sensor fusion
Related to the Loco Positioning system is our line of other positioning sensors; the Z-ranger deck and the Flow deck. The Flow deck has really good precision at low altitudes but can not provide absolute positioning while the Loco Positioning system does not have the same precision but absolute position capabilities. So what if we fuse the information from the Flow deck with the Loco Positioning system? We have tried it out and it works pretty well, we can get the best of two worlds! The Z-ranger can also be used in the same way to improve the Z component of the estimated position when flying bellow ~1m.
Even though it works using multiple positioning sensors at the same time, there is room for improvements and some tweaking will be required to make it rock solid.
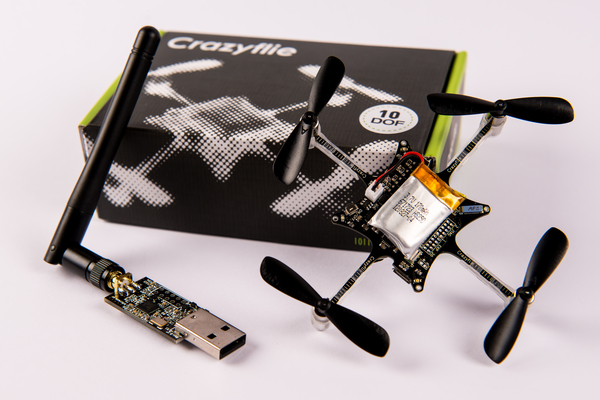
The Crazyflie, the original one, usually called Crazyflie 1 to avoid confusion, was the first commercially available open source nano quadcopter back in 2013. After getting feedback on the platform and having a lot of ideas of things that could be improved, we developed the Crazyflie 2.0 during 2014 and released the same fall. We decided we wanted to keep full backward compatibility with Crazyflie 1, both in the firmware project and in the different clients and support libraries even though we now had more processing power and RAM.
But during the last year we’ve almost exclusively been adding functionality that is Crazyflie 2.0 specific, while still trying to stay inside the constraints of the Crazyflie 1. We’ve also seen a decline in the discussions and interest of the Crazyflie 1. So this week when we once again broke the build because we run out of RAM in the Crazyflie 1, we decided to remove the Crazyflie 1 support from the Crazyflie firmware project. It’s of course with a heavy heart we do this, but we feel that in order for the Crazyflie 2.0 to move forward it’s a must. The last release that’s compatible with the Crazyflie 1 is 2017.6.
But if you’re still using the Crazyflie 1, don’t worry we’re not completely dropping it, we will continue to carry spare parts and if anyone wants to continue firmware development we will be happy to assist. If anyone is motivated, the code can be branched from the last release and we could make a new repository to host the Crazyflie 1 code.
As we announced recently, the Flow deck for the Crazyflie has been released. There was a high demand the first days and we were unfortunately out of stock in the store for a short time, but now we are restocked and the deck is available again. We also got a shipment of a few production Flow decks to the office, and of course we wanted to play a bit with them to find the limits. During development of the deck we only had one or two working prototypes at a time, but now there were manny, so what could we do?
Swarm with the Flow deck
Aggressive flying
So far we have flown slowish when using the Flow deck and we know that works, but what about more aggressive manoeuvres? We modified the flowsequenceSync.py script in the examples directory of the crazyflie-lib-python library. The original script flies a figure 8 at 0.5 m/s, and we spiced it up to do 1.5 m/s instead.
It works pretty well as you can see in the video but we get a drift for every finished figure 8 and we have not really figured out yet the origin of this error. There are a number of potential error sources but it needs further investigation to be fully understod.
Flying one Crazyflie above another
What if one Crazyflie flies above another? How will that affect the performance of the Flow deck? The optical flow sensor is in essence a camera detecting the motion of the floor, a Crazyflie passing through the field of view could potentially confuse the system.
We set up two Crazyflies to fly on a straight line in opposite directions, one 0.5 m above the other. The result was that the top Crazyflie was almost not affected at all when the other passed under it, just a small jerk. The lower one on the other hand, passed through the turbulence of the top one and this caused it to swing quite a lot, though it managed to more or less continued in the correct direction it was decidedly out of track. As expected, flying above another Crazyflie is not a good idea, at least not too close.
Flying a swarm with the Flow deck
When flying with the Flow deck all navigation is based on dead reckoning from the starting position, is it possible to fly a swarm using this technique? We thought that by putting the Crazyflies in well known starting positions/orientations and feed them trajectories that do not cross (or pass over each other) it should be possible. The start turned out to be critical as the system is a bit shaky at altitudes under 10 cm when the sensors on the Flow deck are not working very well yet. Sometimes the Crazyflie moves slightly during take-off and this can be a showstopper if it rotates a bit for instance, as the trajectory also will be rotated. It worked pretty well in most cases but sometimes a restart was required.
We were inspired by the Crazyswarm from USC and decided to fly 5 Crazyflies with one in the center and the other 4 spinning around it. Note the center Crazyflie turning but staying on the spot.
We used the Swarm class in the python library to control the 5 Crazyflies. The code used to connect to the Crazyflies one by one which takes quite some time, we changed it to a parallel connect while we were at it and got a significant speed up.
It is a lot of fun playing with the Flow deck and scripting flights. I know it might be silly, but we laugh the hardest when we fail and crash, the more spectacular the crash the more happiness!
The Flow breakout
For other robotics projects that don’t use the Crazyflie, remember that the same functionality as the Flow deck delivers soon will be available in the Flow breakout board. It is compatible with Arduino and other hosts.
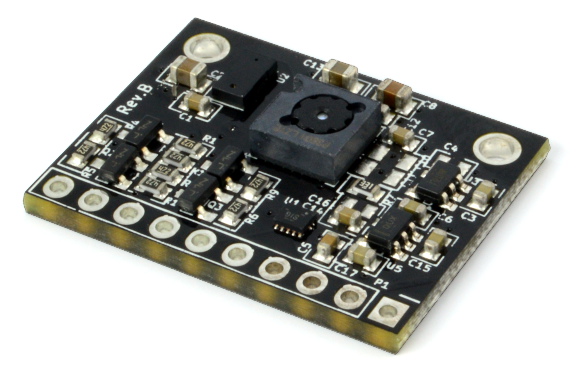
Last week we released the Flow deck, it enables you to get really stable autonomous flight with the Crazyflie without requiring an external positioning system. We have been lucky to get access to the brand new Pixart PMW3901 optical flow sensor, the core of the Flow deck, very early and we wanted to bring this awesome functionality to everyone, including those without a Crazyflie. The solution is the Flow breakout board, it enables anyone to use this new optical flow sensor for any kind of motion tracking.
The flow breakout contains a PMW3901 optical flow sensor and a VL53L0x time of flight ranging sensor, the same sensors that are mounted on the flow deck. We have also added voltage translation logic that allows you to use the flow breakout with a system voltage of 3 to 5V that makes it possible to use it directly with any Arduino board and most embedded system. Further more we have written an Arduino driver for the PMW3901 optical flow sensor to make it easy to use the breakout deck. For the VL53L0x there are already a couple of drivers available out there.
The flow breakout is currently being manufactured and will be available in our shop in a couple of weeks. If you want to be notified of the Flow breakout board availability, please sign up in the shop or follow us on twitter.
There have been a few requests from the community for a brushless Crazyflie and we blogged about a prototype we are working on a few weeks ago. The most common reason for wanting brushless motors is to be able to carry more load, in most cases a camera. A camera could be used for FPV flying or open up various image processing use cases like understanding the would around the drone using SLAM. Image processing on-board requires quite a lot of processing power and the CPU in the Crazyflie could not handle that, so more processing power would be required for a scenario like that. It is summer time (with a slight touch of play time) so we wanted to see what we could do with the CF Rzr and if it would be a useful platform for these types of applications. We hope that we might get some insights on the way as well.
We set the goal to try to add a camera, a small “computer”, the Flow deck for assisted flying, FPV capabilities and support for a standard RC controller.
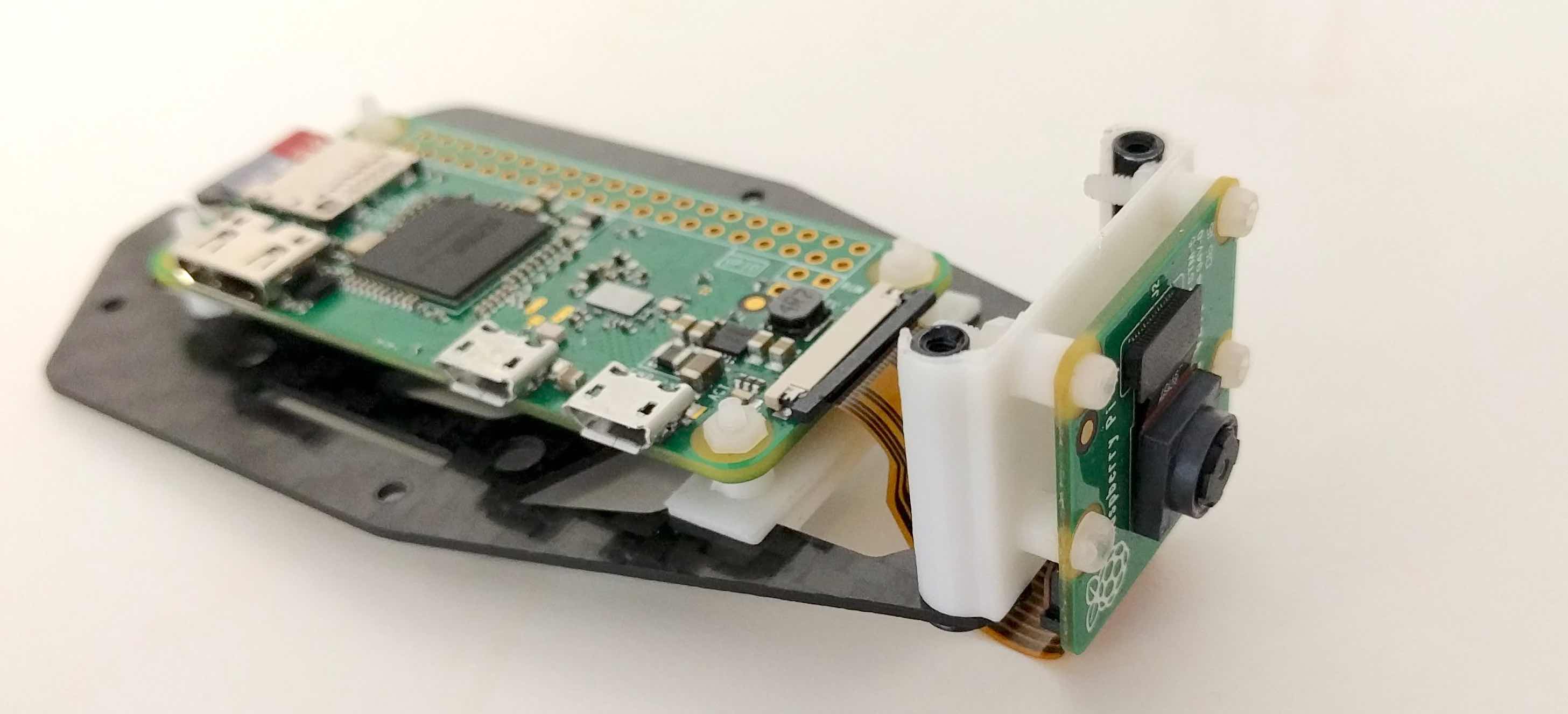
We chose the Raspberry pi zero-w in order to get video processing and video streaming from the quad as well as more computing power. The Raspberry pi zero is not the most powerful board our there but it has a couple of advantage for our prototype:
It has a readily available, good quality camera and good software support for it
It has an analog video output and hardware streaming support, which means that the quad could be flown FPV using the Raspberry pi camera
It has hardware JPEG and H264 encoders that will enable us to save and stream images and videos if we want to
Raspberry pi and camera mounted on the top part of the frame
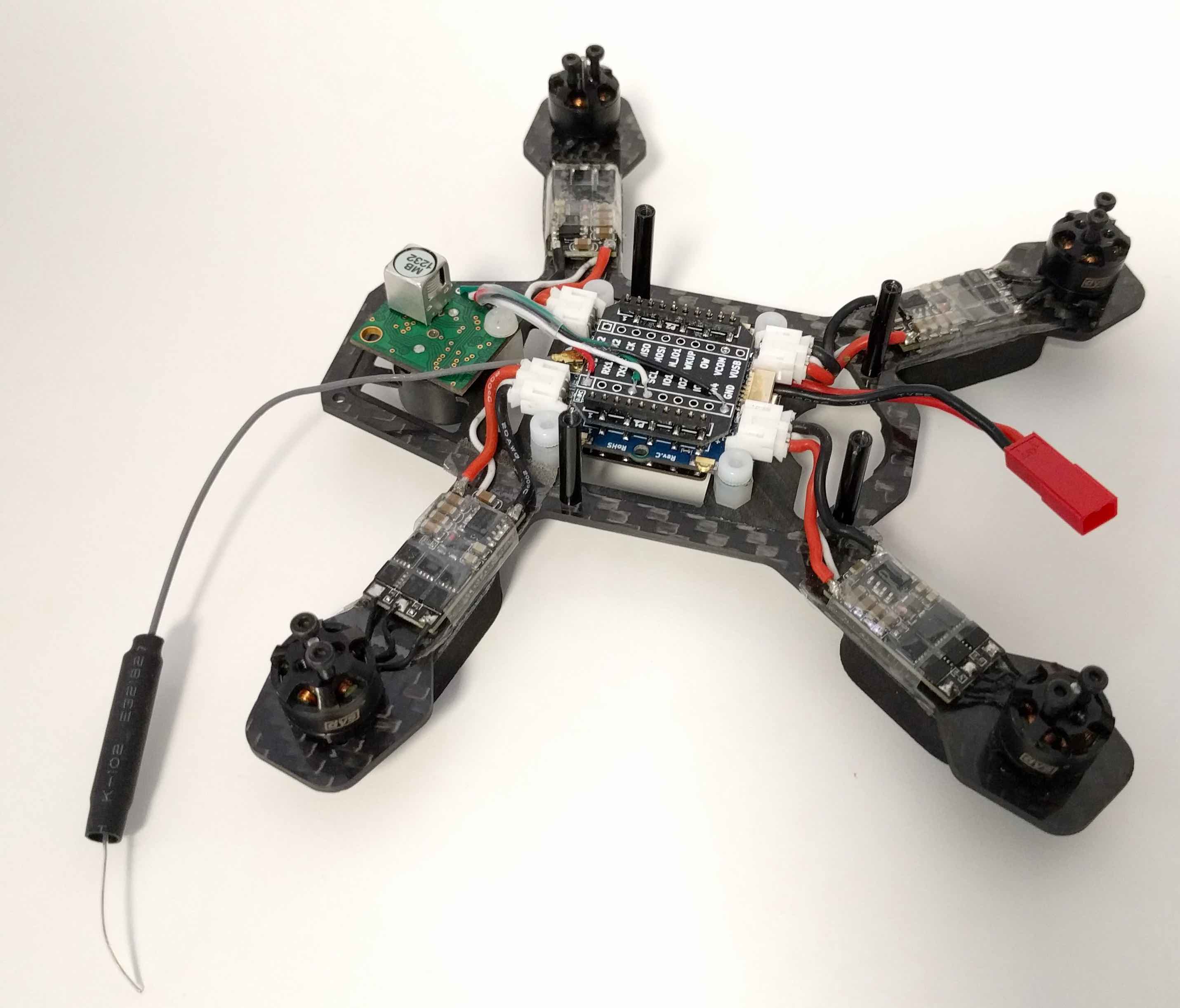
For assisted flight and improved stability, the XY-part of the Flow deck works fine outdoors but the laser height sensor on the deck has a maximum limit of 1-2 meters, and further more it does not go well with direct sunlight. We decided to add an ultrasound sonar distance sensor to measure the height instead. The ultrasound sonar connects via I2C and was simply soldered to a breakout deck that plugs into the CF Rzr.
Crazyflie Rzr with ultrasonic sonar, breakout deck and flow deck mounted on the lower part of the frame
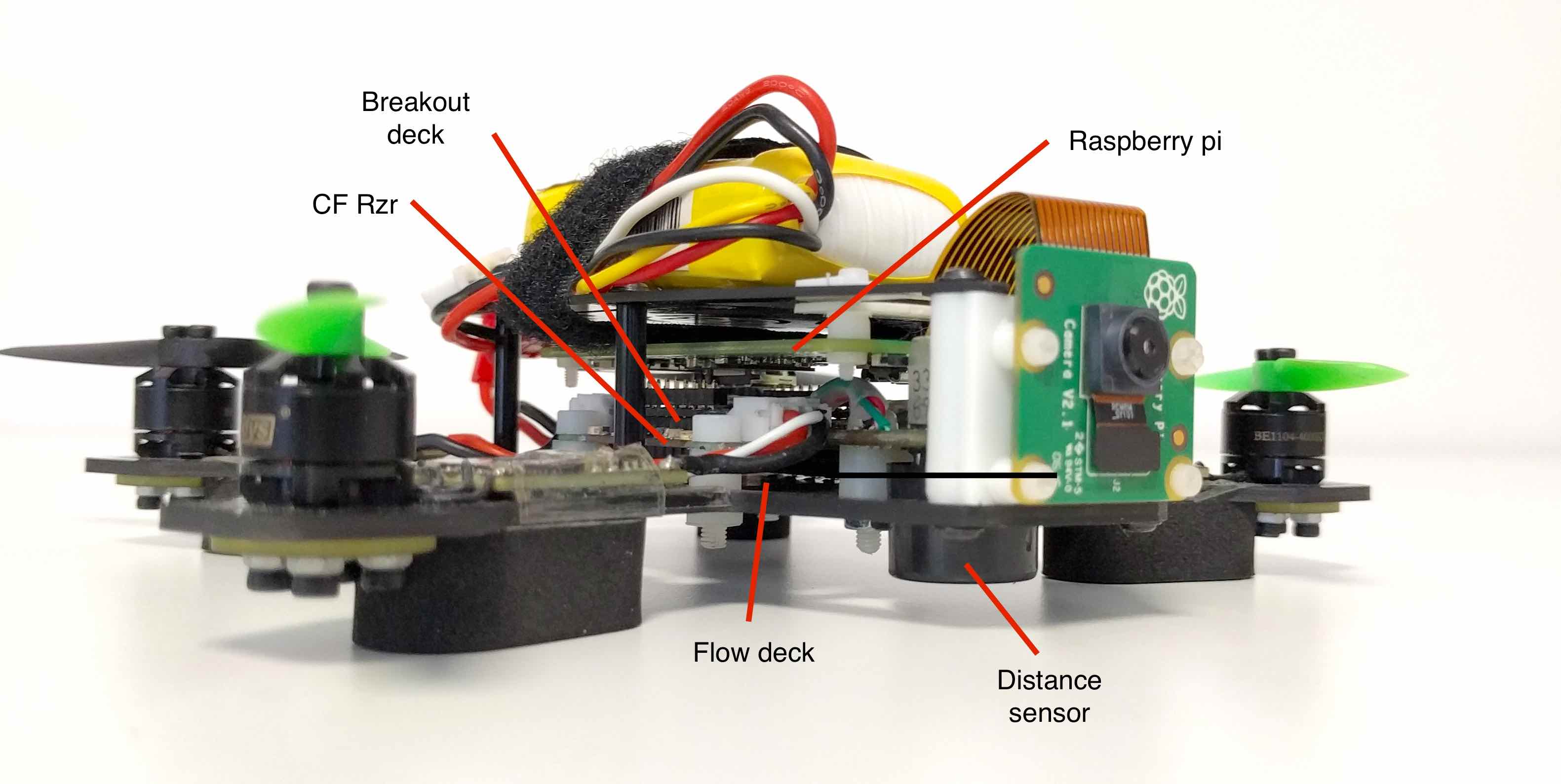
The first step is to see if we can physically fit everything on the frame. With some 3D printed mounts for the camera and the Raspberry pi, we think it starts to look pretty good. Next step will be to squeeze in the FPV video transmitter board, the RC receiver board and finally connect everything together.
The current setup with everything mounted
We are far from done but it is a good start, and it is fun.