This week’s Monday post is a guest post written by members of the Robust Adaptive Systems Lab at Carnegie Mellon University.
As researchers in the Robust Adaptive Systems Lab (Director: Prof. Nathan Michael) at Carnegie Mellon University http://rasl.ri.cmu.edu, we’re interested in developing algorithms for control, planning, and coordination to enable robots to adapt to their environments, and we use the Crazyflie platforms to help us test our theory on real world systems.
We employ Crazyflie quadrotors to evaluate several research objectives in our lab. One research thrust looks at enabling a platform to learn new controllers as it flies, allowing the quadrotor to automatically switch between controllers to handle specific flight conditions. Another objective looks at adapting flight plans for multiple robots in real time, based on what a user tells the robots to do. We use the Crazyflie platform to evaluate our algorithms because the hardware is robust and the user community has helped make firmware available on which we can base our own systems (J. A. Preiss, W. Hönig, G. S. Sukhatme, and N. Ayanian. “Crazyswarm: A Large Nano-Quadcopter Swarm,” ICRA 2017. https://github.com/USC-ACTLab/crazyswarm). At the same time, the power and memory constraints of the Crazyflie force us to pursue efficient algorithms that can handle real world considerations such as limited battery life and computing restrictions.
We’re bringing these research ideas together to make an adaptive multi-robot system that a person can direct online and operate over long periods of time–longer than the lifespan of a single battery. In this blog post, we wanted to share a bit of information about some of the research we’re working on that uses the Crazyflie platforms. We look at single-robot controllers, multi-robot planning systems, and hardware designs to move us towards a persistent, adaptive swarm of Crazyflies.
Control Approaches
We have looked at implementing advanced control strategies onboard the Crazyflie for improved safety and flight performance. This includes an extremely efficient formulation of explicit Model Predictive Control (MPC) developed specifically for systems like the Crazyflie that have severe computational constraints due to size, weight, and power limitations. MPC optimizes the control commands based on current and predicted motion, allowing us to enforce speed limits and avoid motor saturation. The controller is run in a separate task on the STM32F405 MCU, allowing it to maintain a 100 Hz position control rate without blocking other components, such as the state estimator and attitude controller.
In the image above, the vehicle uses MPC control to rapidly and accurately move between two destinations. [V. R. Desaraju and N. Michael, “Fast Nonlinear Model Predictive Control via Partial Enumeration,” ICRA 2016.]
Multi-robot Systems
Another element of our research emphasizes adapting plans for multi-robot systems online, in order to translate a human operator’s intent into dynamically feasible and safe motion plans. We are using a swarm of Crazyflies for hardware validation of the online motion planning algorithms.
Our experimental testbed consists of a Vicon motion capture system that provides the state information (position and orientation) of the robots. The position coordinates and the heading angle are broadcast to the individual Crazyflies using the radios at a rate of 100 Hz. A centralized planner, running on a separate thread, parses user instructions into dynamically feasible and safe motion plans for each individual robot. The user instructions consists of high level information such as robot ids, behavior type (go to a target destination, rotate in a circle), and formation shapes (line, polygon, 3D). Once the feasible and safe motion plans are computed, the desired position setpoints are broadcasted to the Crazyflies at a rate of 30 Hz.
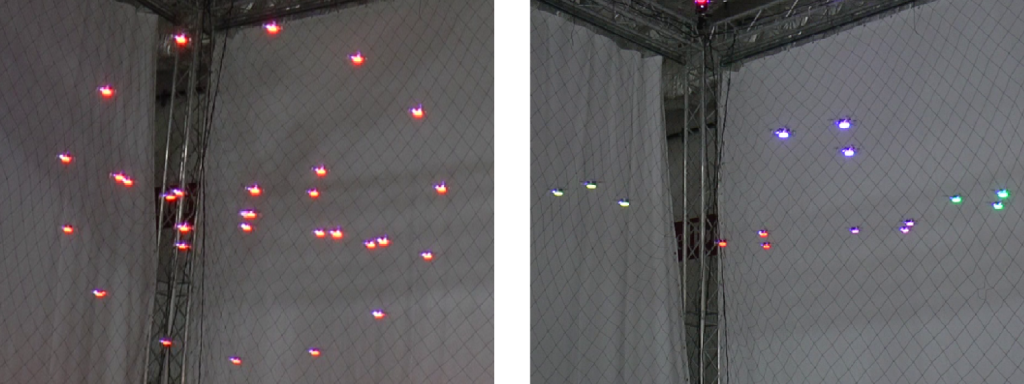
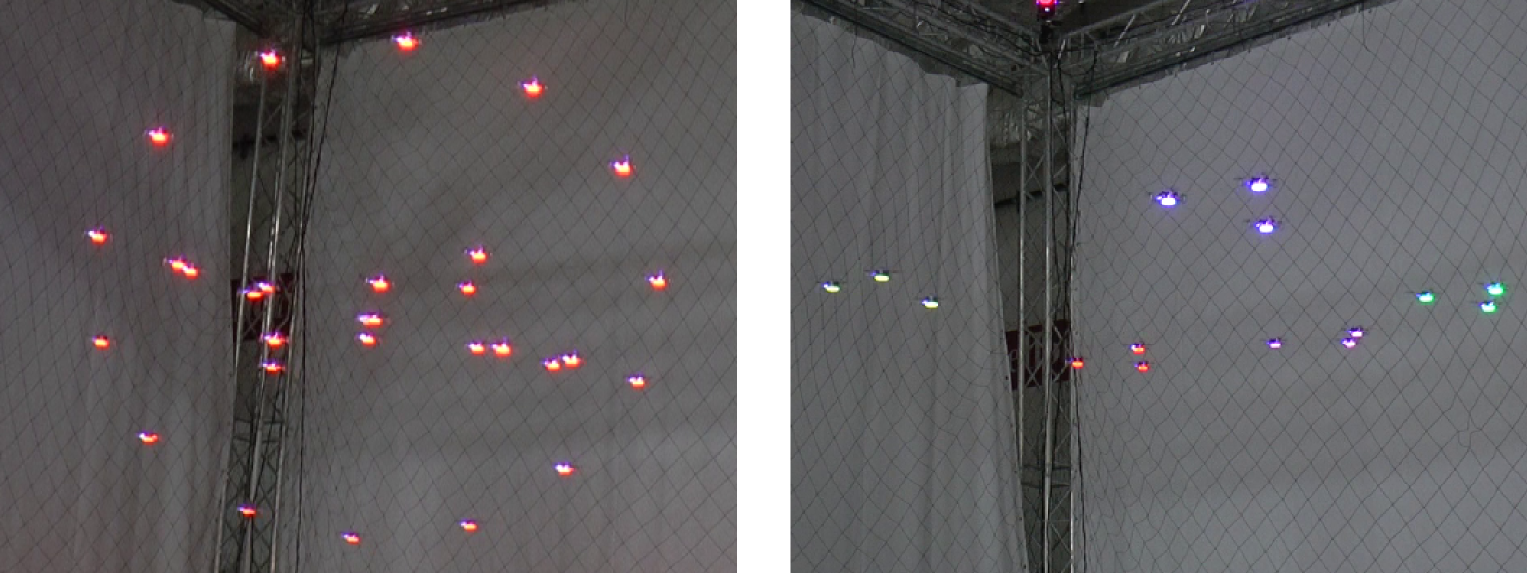
These images show a formation of 30 Crazyflies in a 3D shape and five groups of three Crazyflies, flying around a motion capture arena in response to a user’s direction. The multi-robot planner computes these flight plans online in response to the user’s commands, without any prior planning. [Ellen A. Cappo, Arjav Desai and Nathan Michael. “Robust Coordinated Aerial Deployments for Theatrical Applications Given Online User Interaction via Behavior Composition,” DARS 2016.]
Hardware Considerations
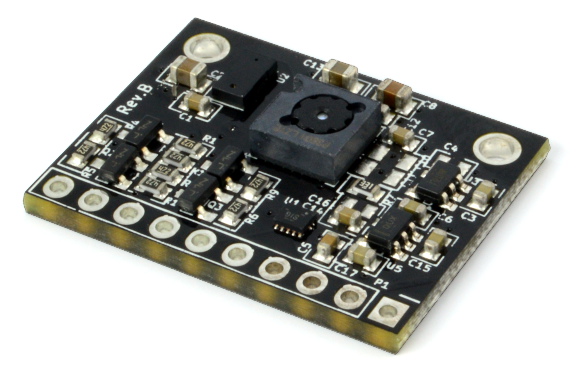
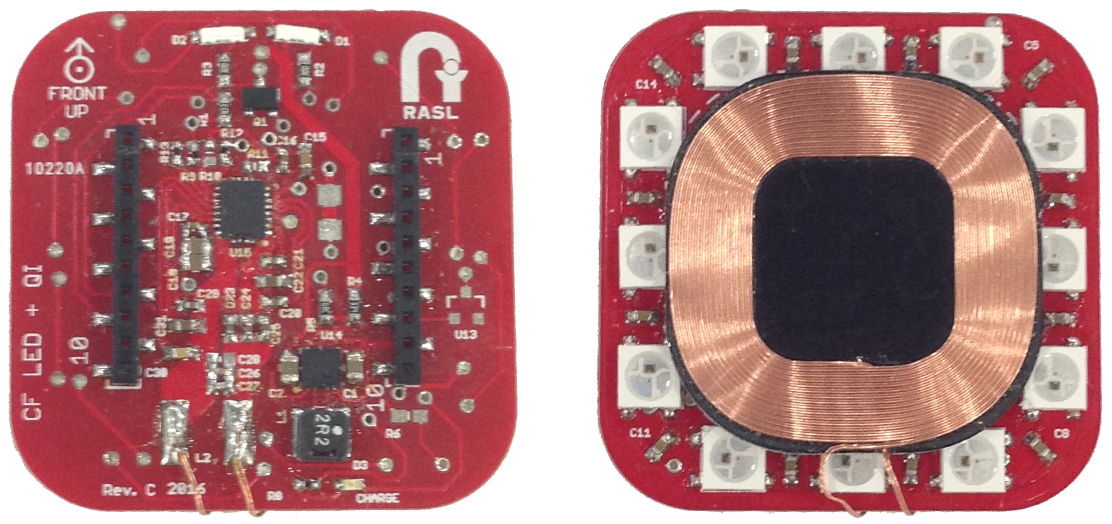
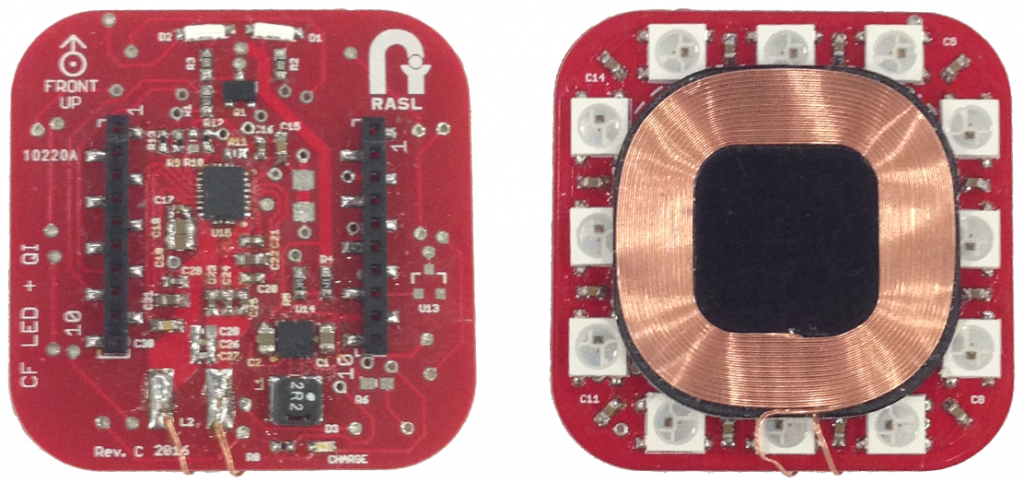
As we move towards operating for long periods of time, we needed to incorporate the Qi inductive charger to enable the robots to recharge. We also want to retain the LEDs, to keep an aesthetic visual element and act as status indicators. There were two concerns with using both the standard LED and Qi decks: they both mount to the bottom of the Crazyflie, and both decks add weight. We created a combined deck based on the schematics from the Bitcraze wiki, and the final deck is shown below and weighs in at 6-7g.
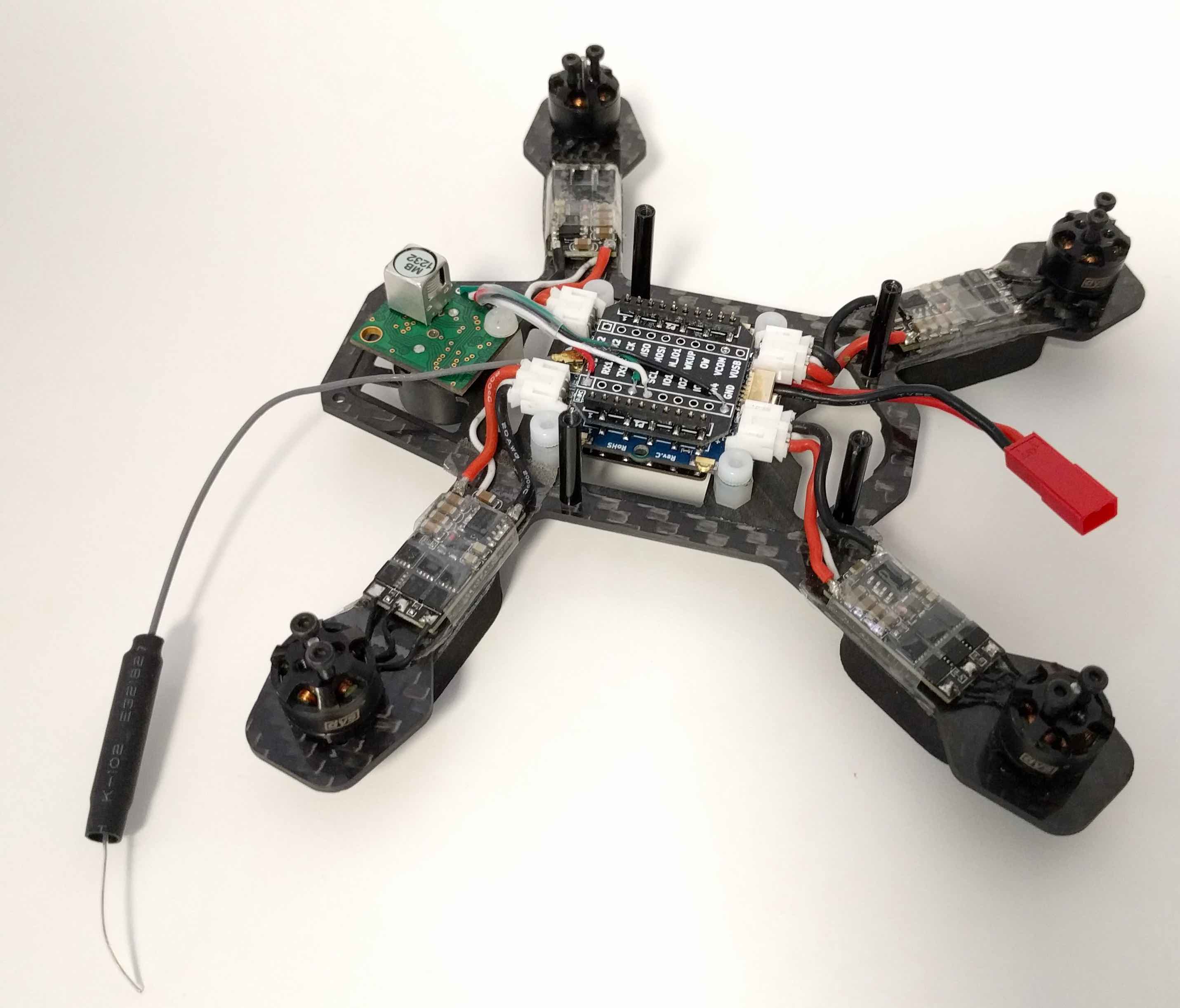
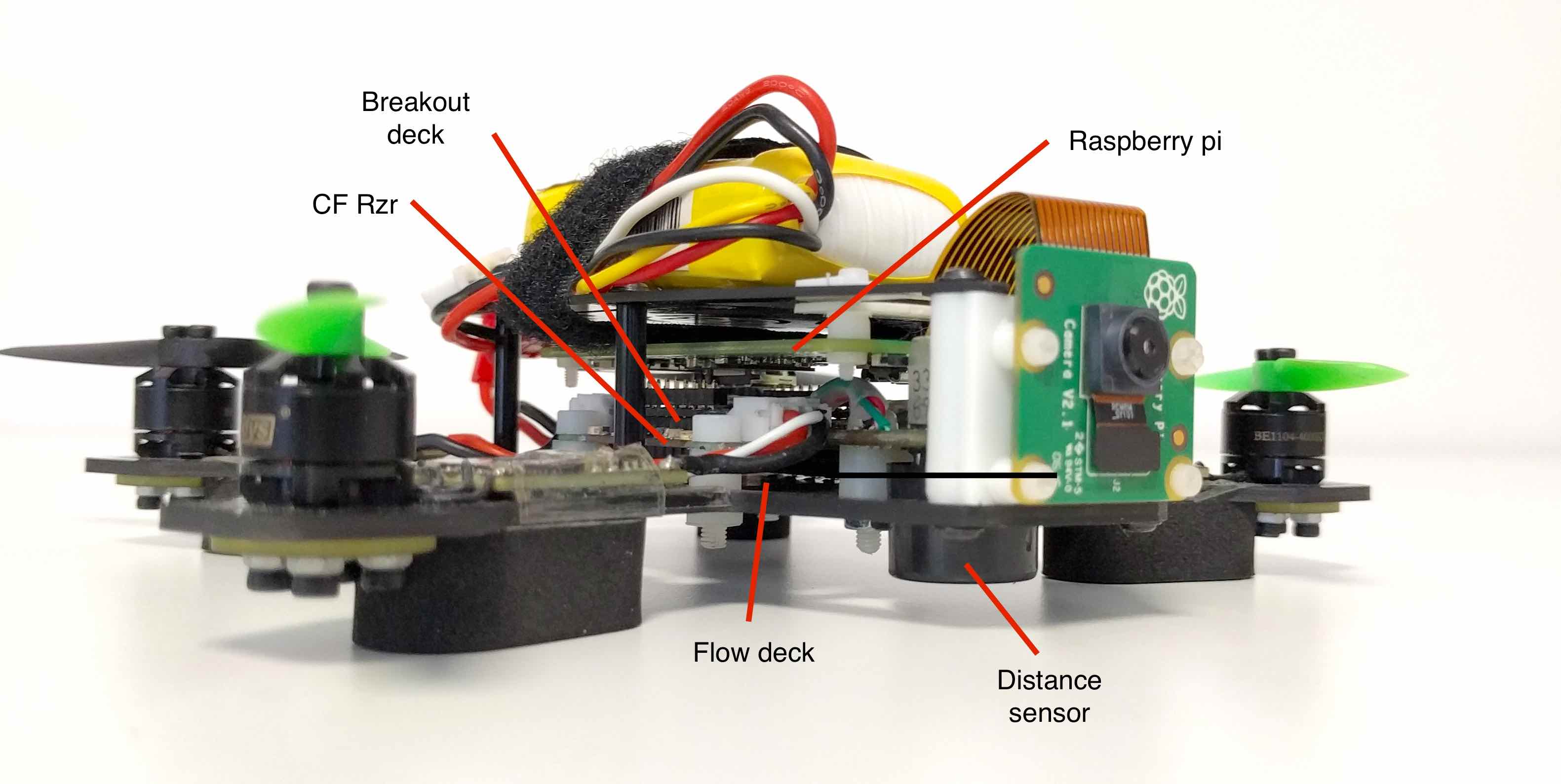
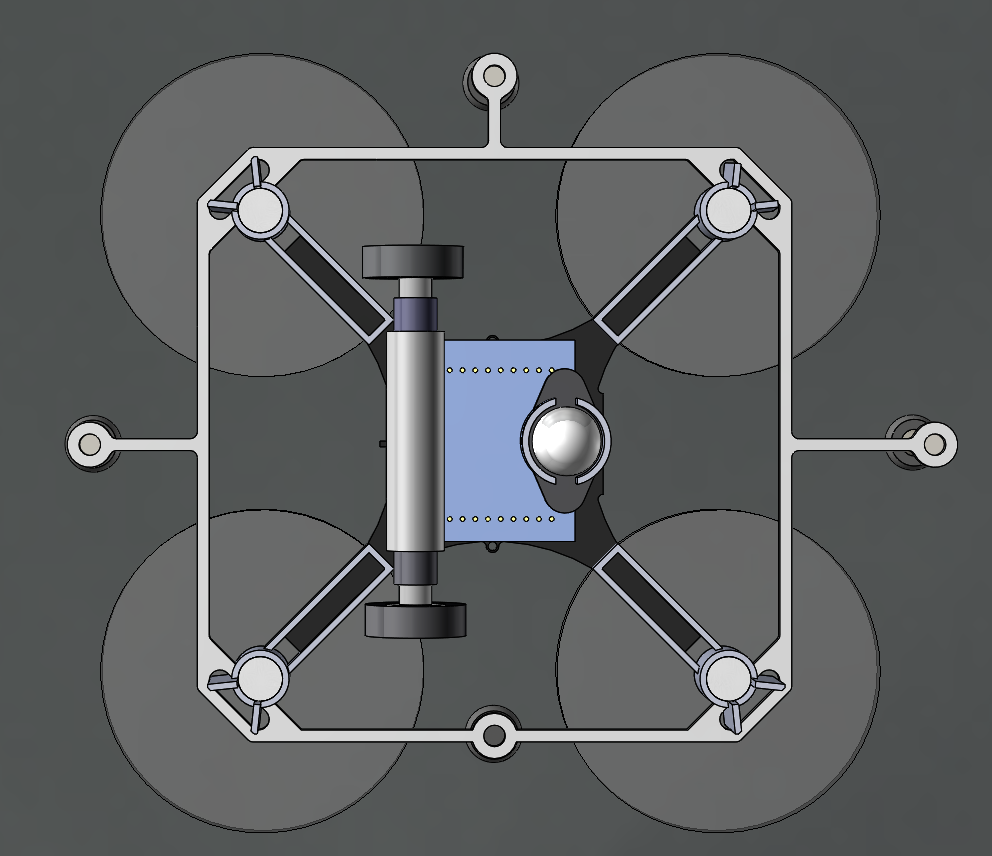
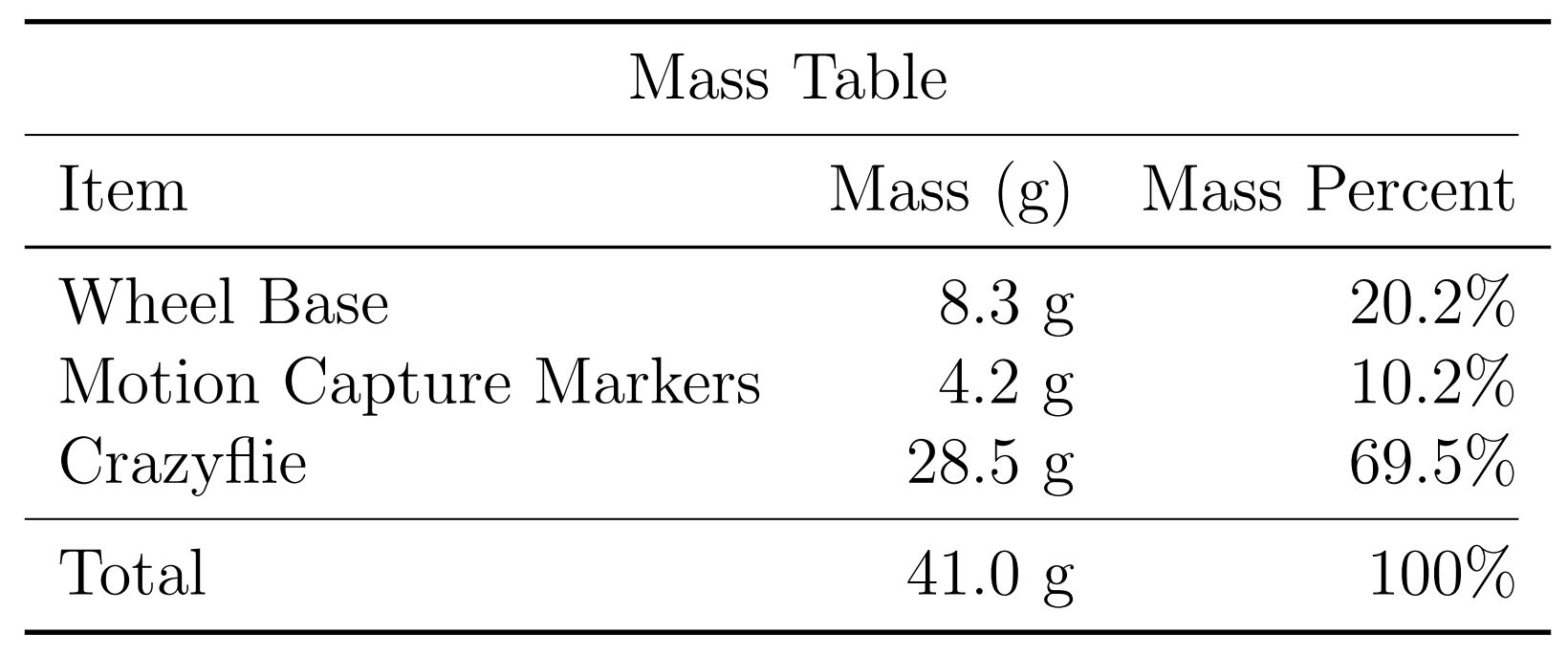
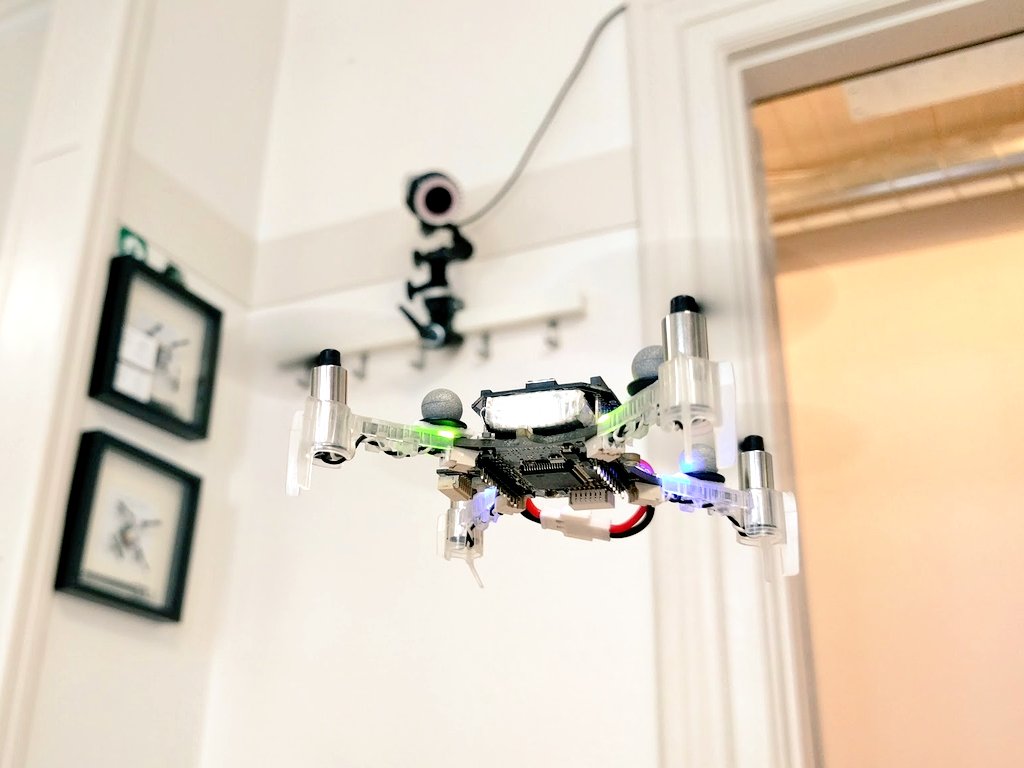
Even with the combined Qi + LED deck, we observe shorter flight times and motor saturation with the Crazyflie flights, so we increased the battery capacity and flying with different motor and propeller combinations. Pictured below is a Crazyflie with 7×20 motors using 55mm propellers and a 500mAh battery, and carrying a foam mount for the motion capture markers. No frame modifications are required as the motors fit in the mounts and the battery is chosen to fit within the header pins. These changes resulted in an increase in flight time, greater control margin and aggressiveness, and larger payload capacity.

Toward Persistent Operation
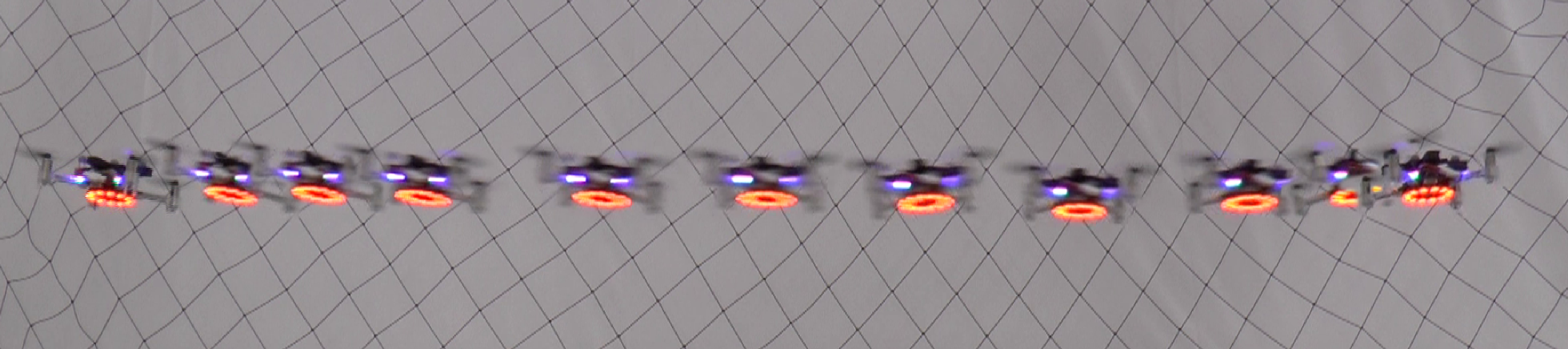
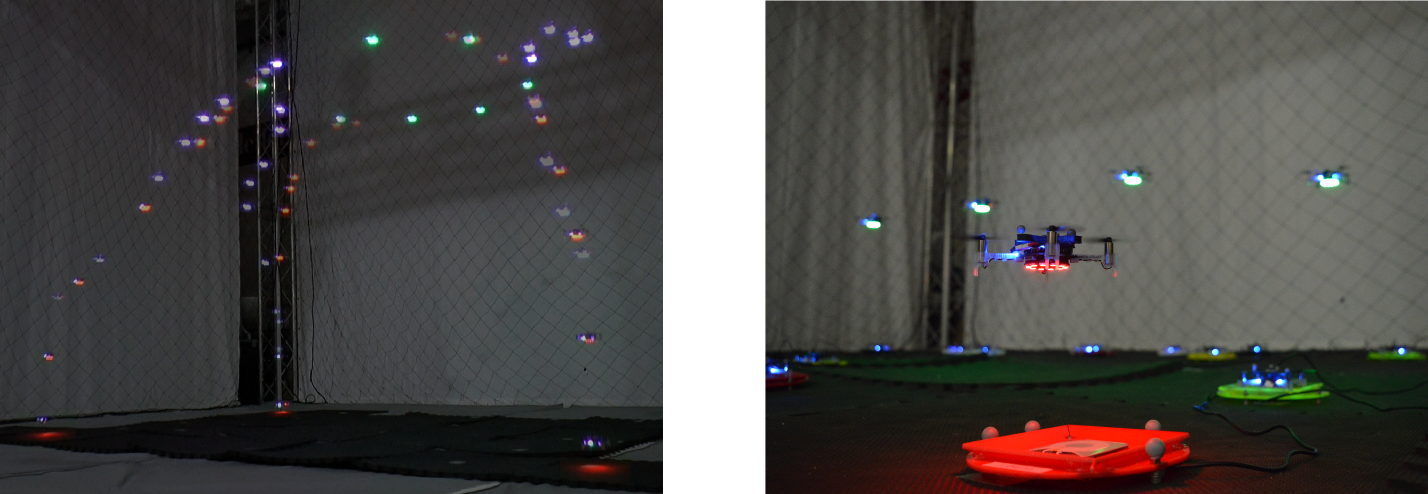
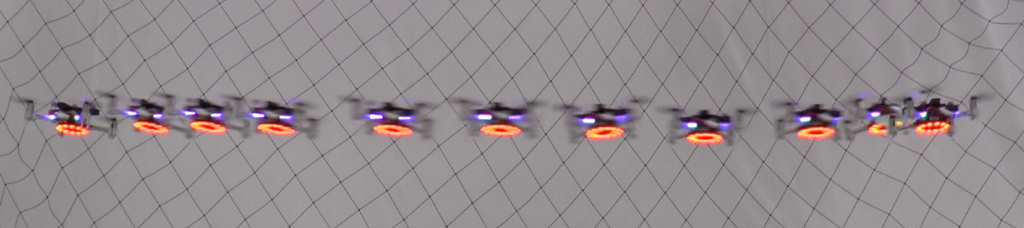
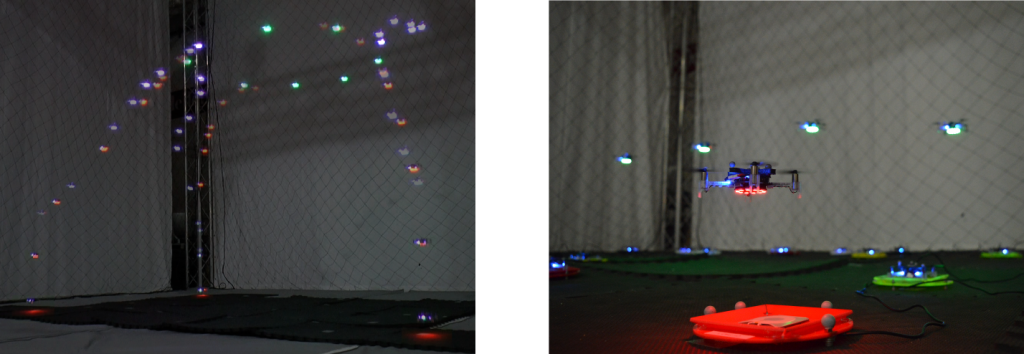
The capabilities we mentioned above allow us to work towards long duration operation. We are currently integrating our adaptive control, online planning, and efficient hardware design to enable persistent operation of a swarm of Crazyflies. To achieve this goal, we are developing scheduling algorithms that update flight plans based on battery capacities across a Crazyflie fleet. The flight planner calculates trajectories that allow robots with full batteries to exchange places with robots with expired batteries, landing Crazyflies that need to recharge onto charging stations. In the first image below, 10 robots rotate in a circle formation. The time-lapsed image shows three Crazyflies with full batteries (with blue LEDs) exchange places with three Crazyflies with depleted batteries (with red LEDs). The second photo shows a close-up of our Crazyflie charging station.
In closing, we show a few video clips of Crazyflie flight illustrating the research we discuss here. We show a group of fifteen Crazyflies following online-issued commands to split and merge between formations; a formation of 30 Crazyflies; and an example of our exchange planner, substituting robots into a multi-robot formation and returning robots to ground station locations.
Contributors: Ellen Cappo, Arjav Desai, Matt Collins, Derek Mitchell, and Vishnu Desaraju, students and researchers at the Robust Adaptive Systems Lab (Director: Prof. Nathan Michael), Carnegie Mellon University.