Guest post by Dominik Grzelak, Dresden University of Technology, Germany
In my initial post about XR-PALS, I introduced a tool on reducing setup time for the Loco Positioning System (LPS). Over time, one very practical aspect remained: handling and mounting the LPS nodes themselves.
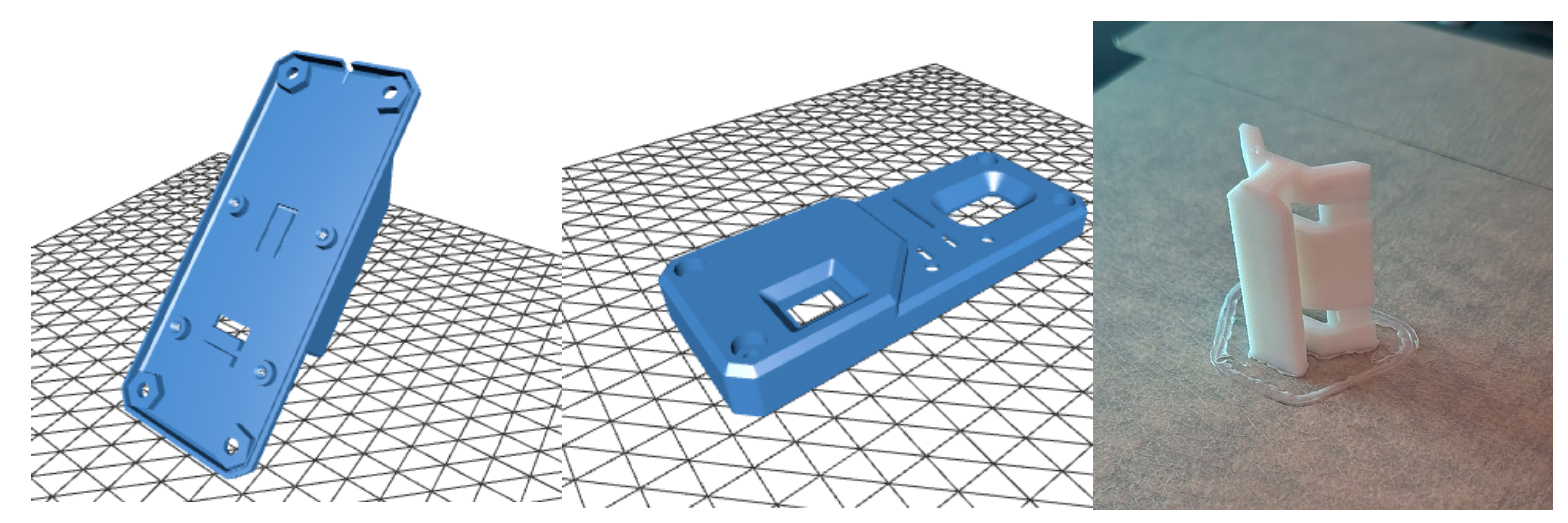
In this post, I would like to share a 3D-printable enclosure and mounting system for LPS nodes that emerged from daily use and was developed hand-in-hand with a technical designer friend. The goal was to make LPS nodes faster to deploy, and more robust in general; they have already withstood drops from heights of up to 2 m.
Place the back part as shown in the figure to print without supports. Rotate the front part by 180° relative to the figure to print without supports. The adapter should be printed standing upright.
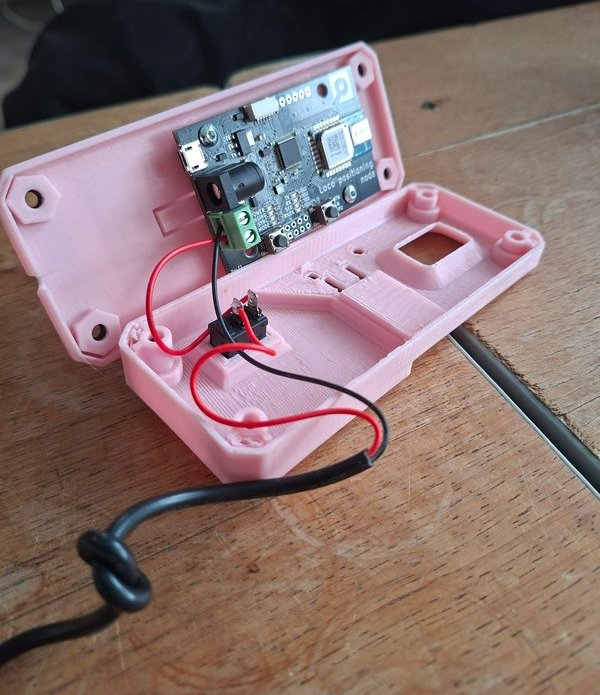
Below are a few notes to get you started building the case:
Place the LPS node into the back part of the case.
Install the toggle switch and ensure correct orientation.
Connect and solder the USB power cable wires.
Lay down the USB cable on top of the designated notch in the back part (tie a small knot to release the tension).
Attach the front part and secure it with screws.
Use the adapter (“slider”) to mount the case on a tripod or pole (with cable ties, for example).
Make sure the red and black cables are wired correctly.
The USB power bank itself serves as the power indicatorfor the LPS node.
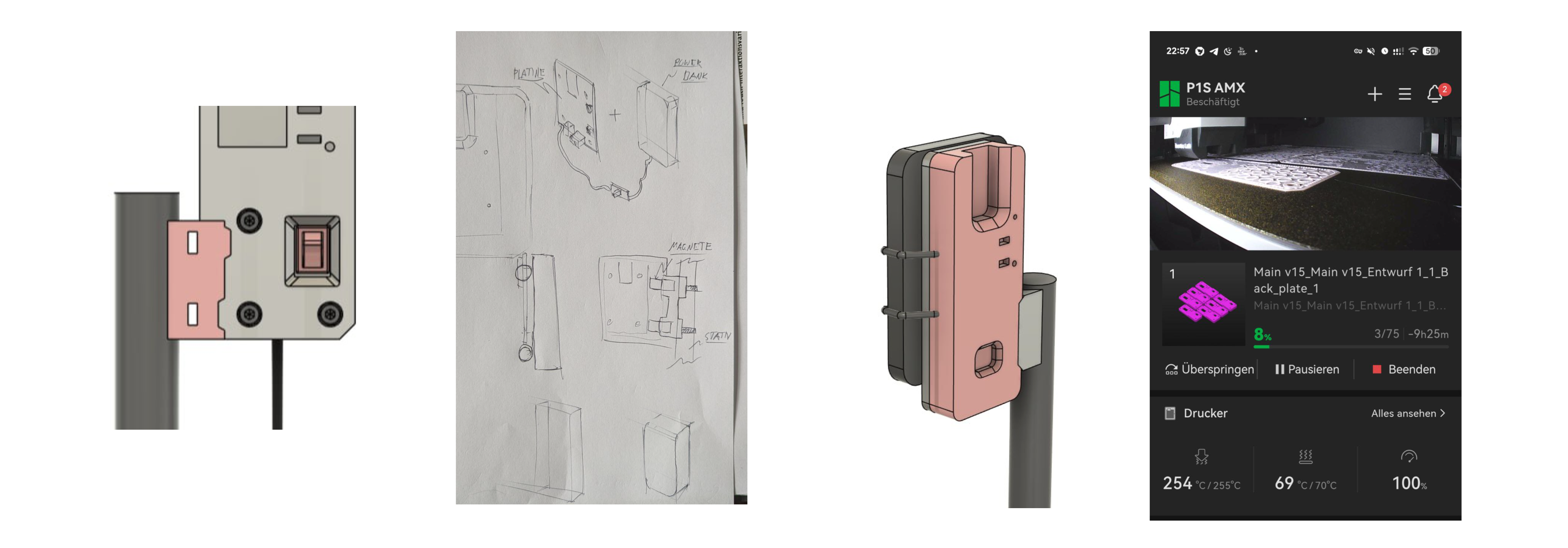
Evolution of the Case
The design itself went through several iterations with adjustments.
In parallel, multiple design variations were explored to evaluate different approaches to mounting, cable routing, and overall form factor. Attention was paid to ensuring the parts print cleanly on common 3D printers without supports.
This process helped smooth out small usability issues and resulted in a design that is both easy to print and straightforward to use in practice.
Vertical and Horizontal Mount Adapter
While the standard configuration mounts the enclosure vertically, a horizontal holder adapter has now been introduced. This provides additional flexibility depending on the experimental setup.
A short demonstration of the mounting system can be viewed here.
Conclusion
This enclosure and mounting system grew out of repeated practical use in changing indoor environments, and we hope it will be useful to others as well.
Feedback and ideas are always welcome. And by the way, if you print your own version, feel free to share photos of your setup!
Today, we rejoin with Maurice Zemp who presented his work in an earlier blogpost.
Road to the Finals
I had officially completed my Matura thesis in October 2024 and submitted it to the Schweizer Jugend forscht competition. When I was selected for the semifinals, I was given the chance to present my work in front of a jury. Their feedback was highly constructive and came with clear requirements: for the finals, I would need to provide more in-depth analyses of the individual system components of my project. At first, this felt like a challenge, but in the process I realized how much these refinements elevated my research. By the time the finals approached, I felt both nervous and proud, knowing that the work I would present had grown far beyond the version I had initially submitted. On April 24, 2025, the big moment finally arrived – the start of the national finals.
Fig. 8: The Location of the semifinals
Day 1
The day began with my journey to ETH Zurich. Traveling by public transport, I carried my Crazyflie drone and the racing gate with me – equipment that had accompanied me throughout countless hours of development and testing and with which I wanted to make the comprehension of my project a bit more feasible. Arriving at ETH, I was greeted warmly at the reception, where I first felt a sense of belonging among dozens of passionate and curious young scientists.
Fig. 9: My booth at ETH
The morning was dedicated to setting up our booths. Piece by piece, the exhibition hall transformed into a vibrant space filled with prototypes, posters, and creative ideas. Once my own stand was ready, I finally had a moment to take in the atmosphere and to start the first conversations. In the afternoon, we were treated to a guided city tour through Zurich. Walking through the old streets, hearing stories about the city, and enjoying the fresh air was the perfect opportunity to get to know the other participants better.
Fig. 10: The Limmat (River in Zurich)Fig. 11: The Grossmünster church in Zurich
Later that day, alumni of Schweizer Jugend forscht visited the exhibition. For the first time, I had the chance to present my project outside of the jury context, and I was surprised by the interest and thoughtful questions I received.
By the time we arrived at our youth hostel late in the evening, the excitement of the day had fully caught up with me. Exhausted but exhilarated, I fell into bed.
Day 2
The second day began with breakfast at the youth hostel, followed by a short tram ride back to ETH Zurich. The morning program was dedicated to the jury sessions, which represented one of the most important parts of the entire competition. Unlike in the semifinals, where I just explained my project and was asked some general questions, this time I was able to discuss my project in detail with several experts – including those specializing in fields beyond my own topic.
Fig. 12: The ETH Main Hall filled with interesting projects
These conversations quickly turned into fascinating discussions. The jurors asked insightful questions, challenged certain assumptions, and encouraged me to think more deeply about the potential applications of my work. At the same time, I received a great deal of praise, which was both reassuring and motivating. It was incredibly rewarding to see that months of effort, refinement, and problem-solving were being recognized by experienced professionals.
In the afternoon, the doors of ETH opened to the public for the exhibition. Friends, family members, and curious visitors from outside the competition came to explore the stands. Presenting my project in this setting felt very different from the formal jury discussions of the morning – it was more relaxed, conversational, and filled with spontaneous questions. I especially enjoyed seeing how people unfamiliar with drone technology reacted to the project, and it gave me the chance to practice explaining complex ideas in a way that was accessible to everyone. After such a full day of interactions, we returned to the youth hostel in the evening. The atmosphere there was much calmer, as everyone tried to recharge a little energy in preparation for the final day.
Fig. 13: Me explaining my project to a friend of mine who came to visit me
Day 3
The final day once again began with our journey to ETH Zurich. In the morning, the exhibition hall opened its doors for a second round of public visits. This time, the experience was especially meaningful for me, as my family came to see my project in person.
After lunch, it was finally time for the highlight of the competition: the award ceremony. A live band set the stage, and soon the opening speeches began. The tension in the room was almost tangible – every participant knew that months, if not years, of work were culminating in this single event. I felt both nervous and excited, my heart beating faster with each passing moment.
Fig. 14: The start of the award ceremonyFig. 15: My nomination to ISEF 2026!
Then came an unexpected twist: even before the regular prizes and certificates were announced, the jury revealed the winners of the most prestigious special awards. To my immense joy, my name was called. I had been selected to represent Switzerland at the International Science and Engineering Fair (ISEF) 2026 in Phoenix, Arizona. The sense of relief, excitement, and pride I felt in that moment is difficult to describe – it was a dream come true.
The ceremony continued with an inspiring keynote by former NASA Director Thomas Zurbuchen, who shared his journey in science and reminded us of the importance of perseverance and never giving up.
Fig. 16: An inspring talk by Thomas ZurbuchenFig. 17: Me being awarded my distinction
Finally, the time came for the official certificates. One by one, every participant was called to receive their recognition. When my turn came, I was awarded the highest possible distinction: hervorragend (outstanding) honored with CHF 1500. The applause and congratulations that followed made the moment even more unforgettable.
The evening concluded with an apéro, where I had the chance to exchange thoughts with professors, fellow participants, and many guests. I was overwhelmed by the warm words of encouragement and congratulations I received for both my project and the recognition it had achieved.
After three exciting, inspiring, and at times exhausting days, it was finally time to return home – this time together with my parents, carrying not only my luggage but also an experience that I will cherish for a lifetime.
Today, we welcome our first blog post by Maurice Zemp. Stay tuned for more of his adventures later!
When I started working on my Matura thesis (a mandatory project in Swiss High School), I wanted to create something that went beyond a purely theoretical project. I was fascinated by the idea of combining cutting-edge technology with a very tangible and exciting challenge: making a small drone fly through a racing course, composed by small gates, completely on its own and as fast as possible. Inspired by the work under Prof. Davide Scaramuzza, I set off for a challenge to find some new alternatives or improvements, while developping my approach from scratch.
What may sound simple at first quickly turns into a highly complex task. A drone needs to perceive its environment, process information in real time, and decide on precise actions within fractions of a second, all without human intervention. Professional drone racing pilots train for years to master this level of control. My goal was to see whether artificial intelligence could achieve something similar, using reinforcement learning as the core technique.
But there was another challenge: I wanted to design a system that wasn’t only powerful, but also affordable and reproducible. Many research institutions use equipment worth tens of thousands of francs for projects like these. I asked myself: Could I build something comparable with a fraction of the budget, and still push the boundaries of what’s possible?
That question became the driving force behind my project, which later brought me all the way to the finals of Schweizer Jugend forscht (short SJf) and saved me a place as the main prize to represent Switzerland at the world’s biggest Youth Science Competition, ISEF 2026. Over the following sections, I’ll share how I built my system step by step, what it was like to present it at the competition, and how it felt when all the effort finally paid off.
Fig. 1: Me with the Crazyflie 2.1 Brushless in the halls of ETH Zurich, where the main event of SJf took place.
Motivation and Objectives
The project I presented at Schweizer Jugend forscht was the result of my Matura thesis, in which I set out to combine my interests in drones, programming, and artificial intelligence. My goal was to develop a complete system for autonomous drone racing, based on Reinforcement Learning (RL), that would not only work in simulation but could also be transferred to real-world conditions.
To achieve this, I focused on three key aspects:
Building a highly efficient simulation environment for training a reinforcement learning agent.
Developing a cost-effective motion-capture system (MoCap) capable of tracking a drone’s position and orientation in real time with high precision.
Integrating both systems in a way that would allow seamless transfer from simulation to real-world experiments with minimal latency.
This combination made the project unique: instead of relying on expensive commercial hardware, I set out to create a solution that would be precise and affordable but still continue the state-of-the-art development in Drone Racing.
Simulation Environment
The simulation was implemented in Python, using Stable Baselines, OpenAI Gymnasium, and NumPy, accelerated with Numba for performance. At its core, the system employed the Proximal Policy Optimization (PPO) algorithm, a state-of-the-art reinforcement learning algorithm known for stability and efficiency.
Unlike general-purpose simulators such as Gazebo, my environment was designed specifically for drone racing. It could process tens of thousands of interactions per second, enabling a training run of a few dozen minutes to correspond to nearly a year of simulated flight time.
Key features included:
A physics-based flight dynamics model accounting for thrust, drag and gyroscopic effects.
A carefully engineered reward function balancing speed, precision and avoiding shortcuts.
A flexible design that allowed different gate sequences and drone parameters to be tested.
A multi-agent environment computing on multiple threads, leading to much shorter training time needed.
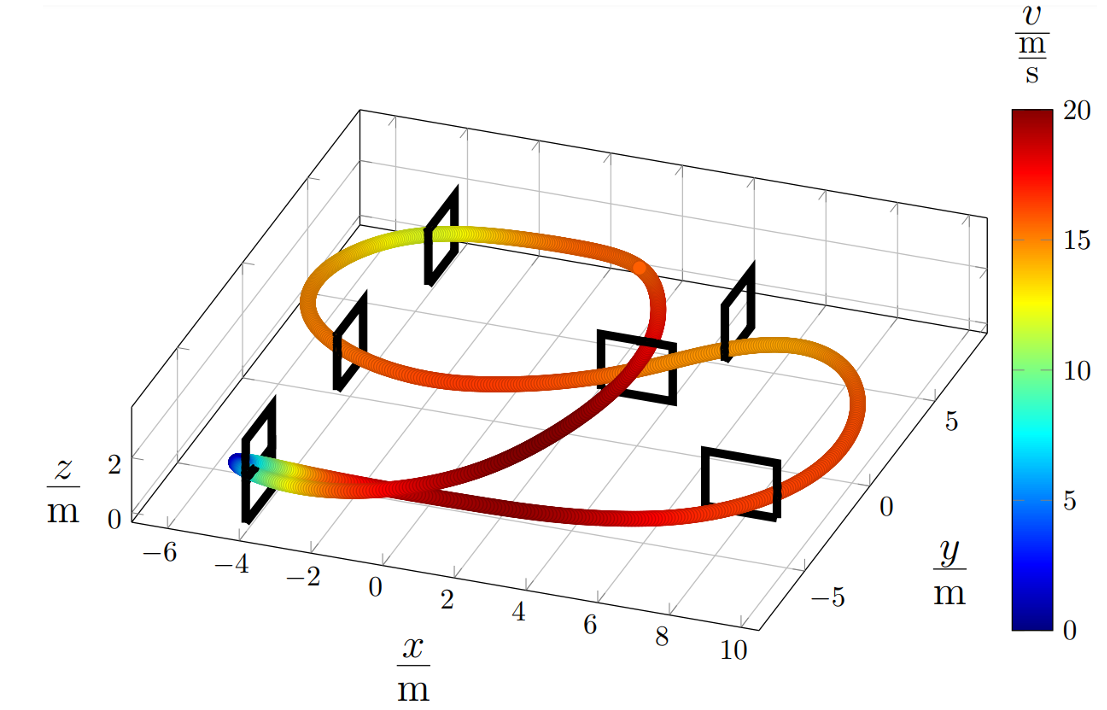
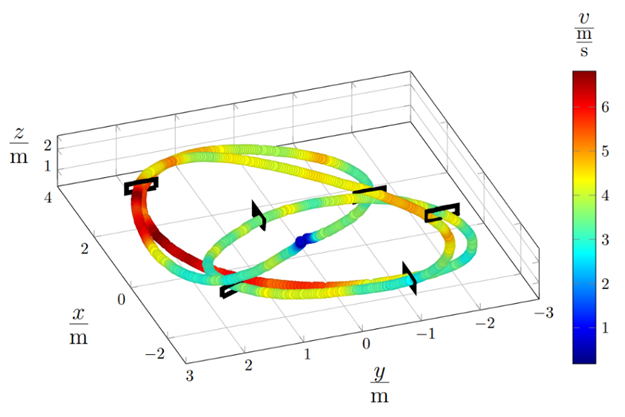
Fig. 2: Path of the drone after two hours of training on a given track
With this setup, an RL agent could learn to complete arbitrary racing tracks in near-optimal time1 after only a few hours of training. In simulation, top speeds of up to 100 km/h were achieved, though these exceeded the physical limits of the real drone and were generated with modified drone parameters.
Motion-Capture-System
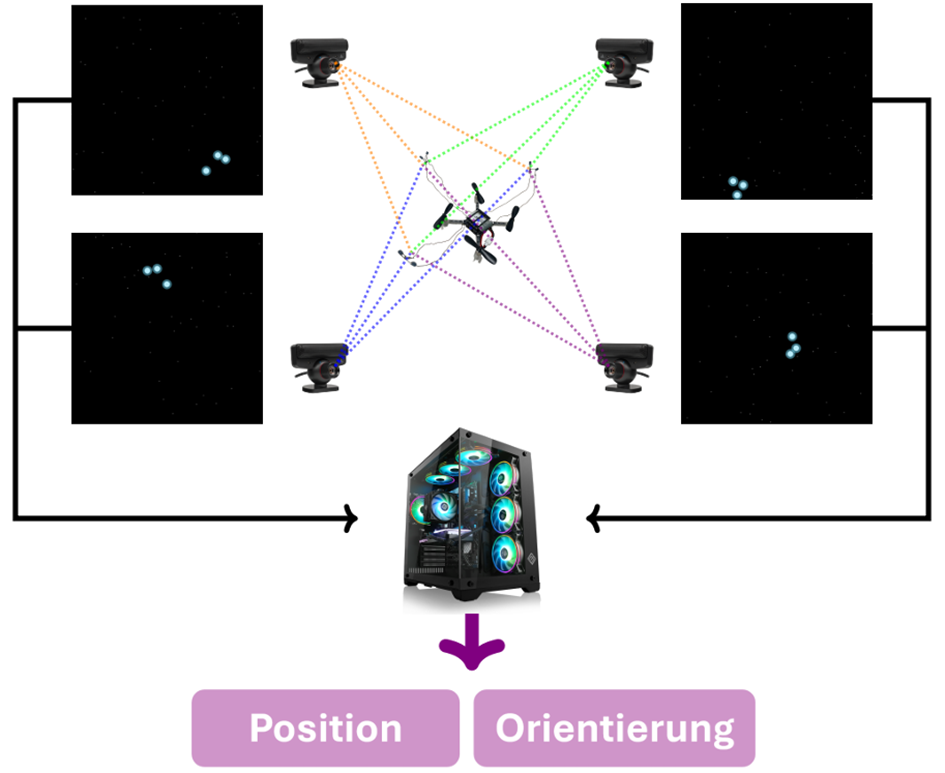
A second cornerstone of the project was the development of a low-cost motion-capture system. Instead of relying on high-end solutions such as VICON or OptiTrack (which can cost tens of thousands of Swiss francs), I built a custom setup. The drone – a Crazyflie 2.1 Nanocopter (later a Crazyflie 2.1 Brushless) – was fitted with infrared diodes. With four cameras capturing at 120 frames per second, the drone’s position was calculated in real time through triangulation. By using three diodes arranged on the drone, I not only wanted to estimate the position but also the orientation. Unfortunately, due to the cameras being budget and thus not having a high-end resolution, the estimation of the orientation was not feasible and was therefore taken from the onboard IMU.
Fig. 3: Motion-Capture-System Concept
System Integration
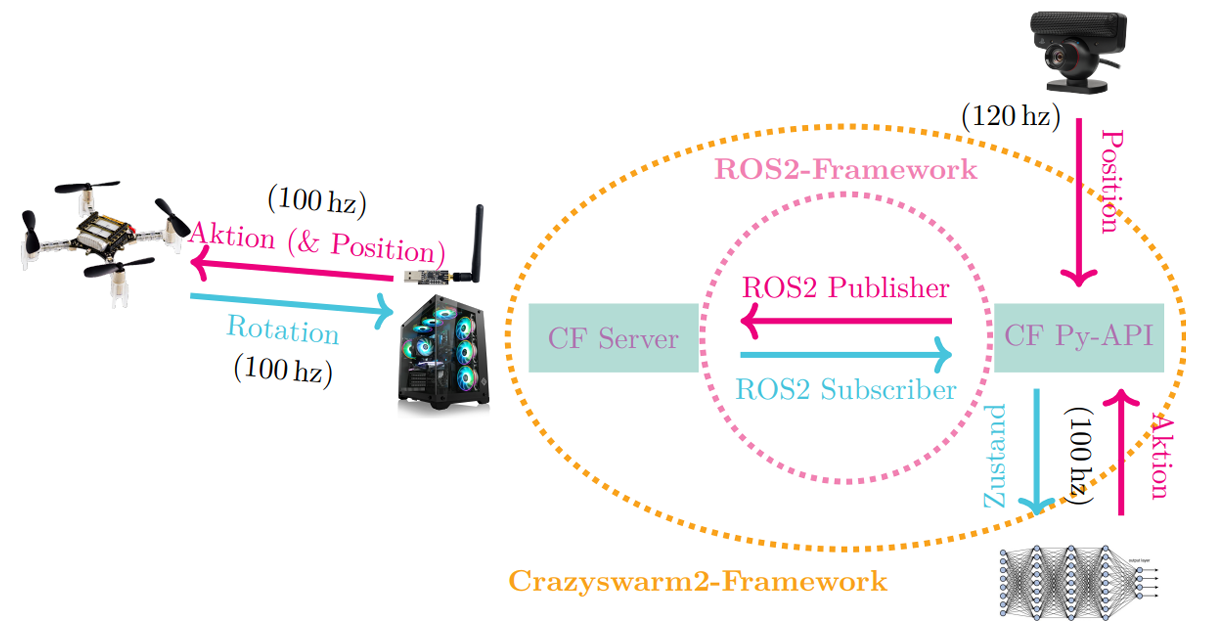
For integration, I relied on the ROS2 middleware and the Crazyswarm2 framework, which allowed the simulation and MoCap data to be processed together with minimal latency. This setup ensured that a policy trained in simulation could be executed on the real drone almost seamlessly.
Fig. 4: Sim2Real Integration Concept
Results & Discussion
The results demonstrated the effectiveness of the combined system:
In simulation, the RL agent completed tracks in nearly optimal time1, demonstrating robust generalization across different gate sequences.
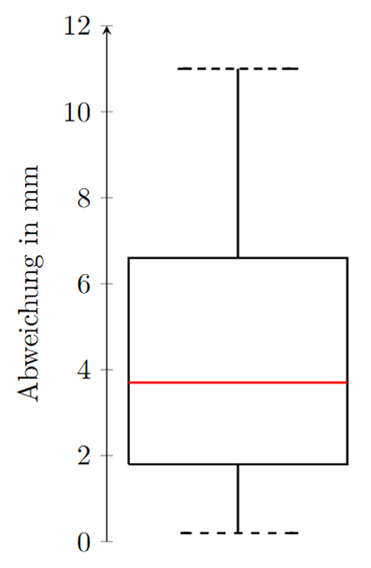
The motion-capture system delivered millimeter-level accuracy and reliable tracking in real time despite its simplicity. (see Fig. 5)
In real-world tests, the Crazyflie drone successfully completed tight gate sequences, even at speeds of up to 25 km/h, with a positional deviation of only 5–12 cm compared to the simulated trajectories. (see Fig. 6)
Given that the gates were roughly A3-sized openings (38 × 29 cm), the precision was sufficient to consistently hit every gate, confirming the feasibility of transferring simulated training into real-world racing. (Video)
Fig. 5: Boxplot of the deviation for collected points on a plane in millimeters
Fig. 6: Tracked Real Life Path on a given trackFig. 7: Realisation in my school’s physics laboratory
The system demonstrated that RL-based controllers can generalize effectively from simulation to reality, even with imperfect models. This robustness shows that RL is promising for real-world robotics applications where exact physical modeling is difficult or costly. To further investigate this robustness, I conducted ablation studies in simulation focusing on aerodynamic drag, as well as analyses of the MoCap system’s accuracy in measuring dynamic motion.
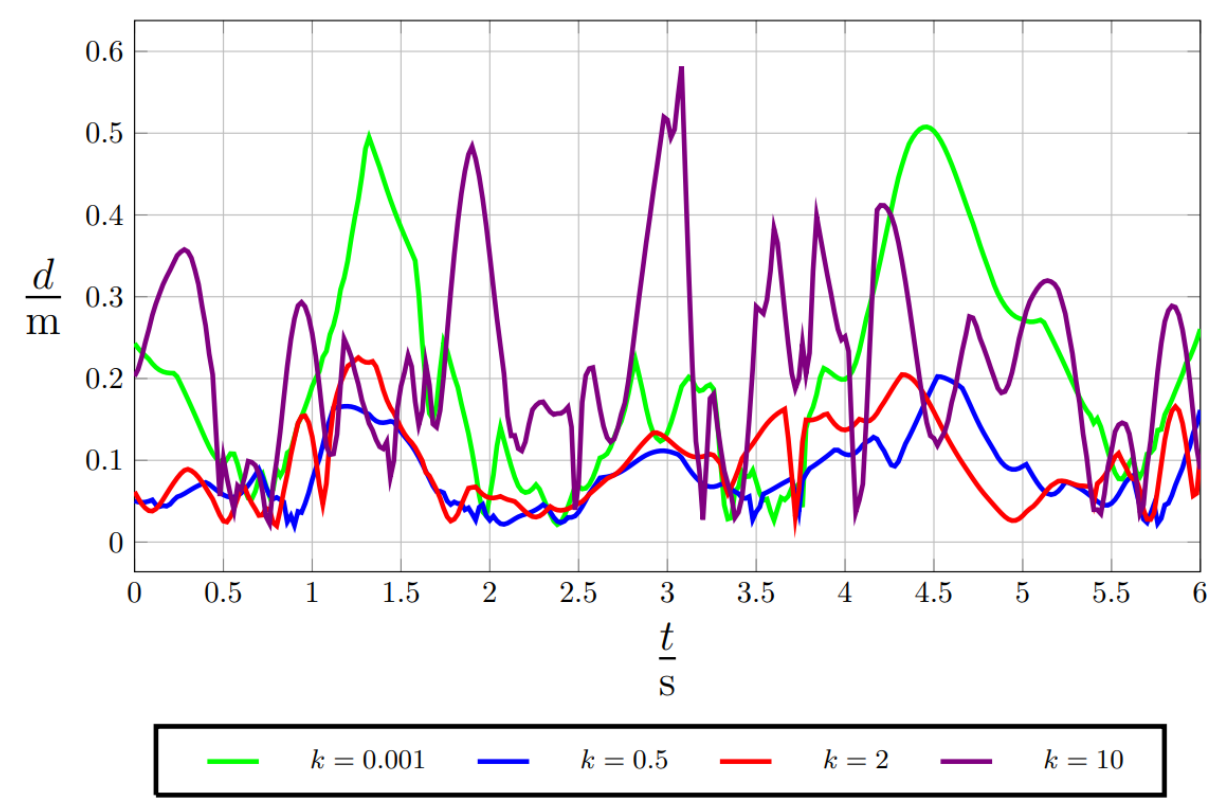
As for the aerodynamic drag, I introduced some randomness during evaluation, which deviated largely from what the Algorithm had trained upon. To achieve this, I introduced a parameter k which was multiplied with the correct aerodynamic drag to view how these differences would impact the flight. In Fig. 8 you can see the deviation from the real path over the course of a flight. As obviously more drag results in lower velocities, the two paths had to be fitted using the nearest two possible points. The results are impressive, even with an enormous change to training such as k = 10 the flight still performed somewhat okay, even though the gates probably wouldn’t have been hit anymore.
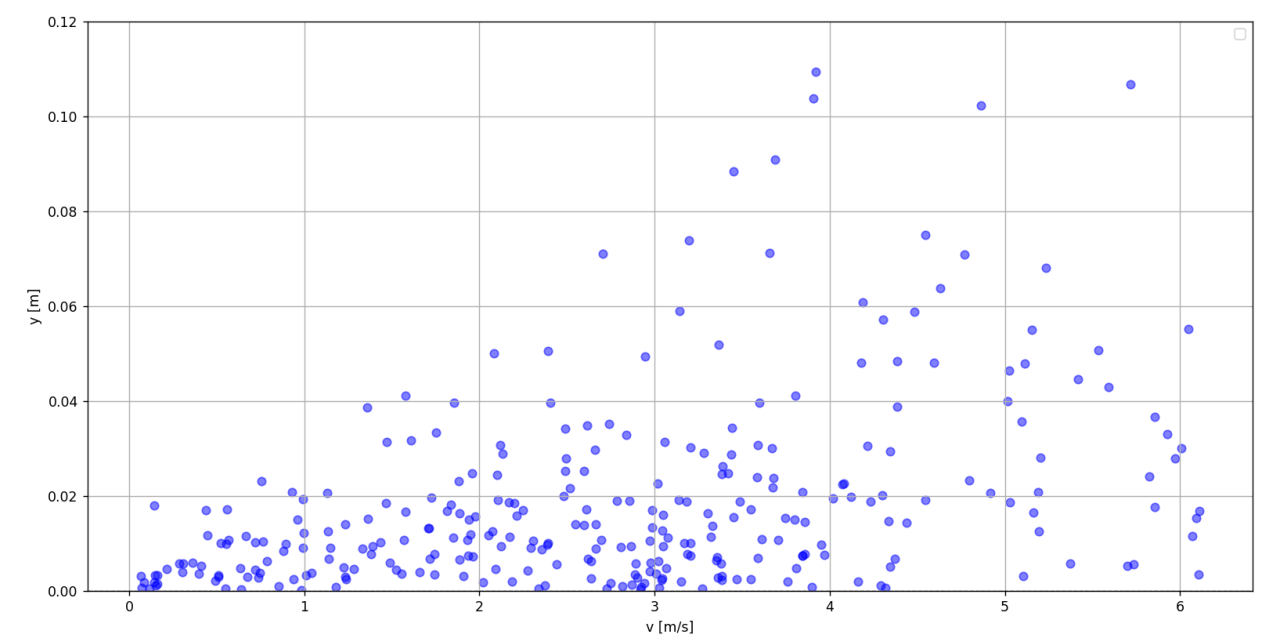
For the MoCap System, I used a mathematically representable motion, such as a pendulum. Then I performed a parameter optimization on this mathematical model and measured the deviation based on the current speed. There is a clear correlation between speed and deviation (see Fig. 9), which most likely was caused by the missing calibration of the cameras.
Fig. 8: Results of ablation studies on aerodynamic dragFig. 9: Experiment to confirm correlation between deviation and speed
Conclusion and Reflection
This work demonstrates that RL, combined with accessible hardware, enables precise and robust autonomous flight in dynamic indoor environments. The results underscore the potential of low- cost robotics solutions to democratize drone research. Even though it was a large project and there were some hard times, I enjoyed working on it a lot and believe that the result and the memories made with it are even more rewarding than any prize money!
Acknowledgments
To end this guest post, I want to sincerely thank Bitcraze for their amazing work and support during the development of this project. They have genuinely built such an incredible testbed for research in autonomous drones, it’s amazing! Without them, this project wouldn’t have worked out the way it did!
Near-optimal time here references to the theoretical boundary of a drone completing this track, given it’s parameters. To be clear, this is not fitting a polynomial with boundaries on their derivatives onto gate segments, as it was done during earlier approches in the 2010s. It was compared to multiple previous approches by UZH RPG such as Optimal Control (OC). Nevertheless, this comparison could be done more extensively in the future, as time ran short in the end. ↩︎
When flying the Crazyflie Brushless, you may have noticed something familiar, as the battery drains, the drone becomes less responsive and can not generate the same amount of thrust it had at the start of the flight. This is because as the state of charge drops, the battery voltage decreases, and that directly affects the thrust output of the motors.
We wanted to fix this. In this post, we’ll explain why the old compensation method wasn’t ideal, how we used system identification to design a new battery compensation scheme, and how this improves thrust consistency across the entire battery range.
Motivation
The key problem is simple: a dropping battery voltage means a dropping thrust for the same command. This leads to flights that start crisp and responsive but is reduced as the battery drain.
Our goal was to make sure that, regardless of the state of charge, the actual thrust stays close to the commanded thrust. Though, for manual flight, sometimes this might not be preferred, so there will be an option to turn it off.
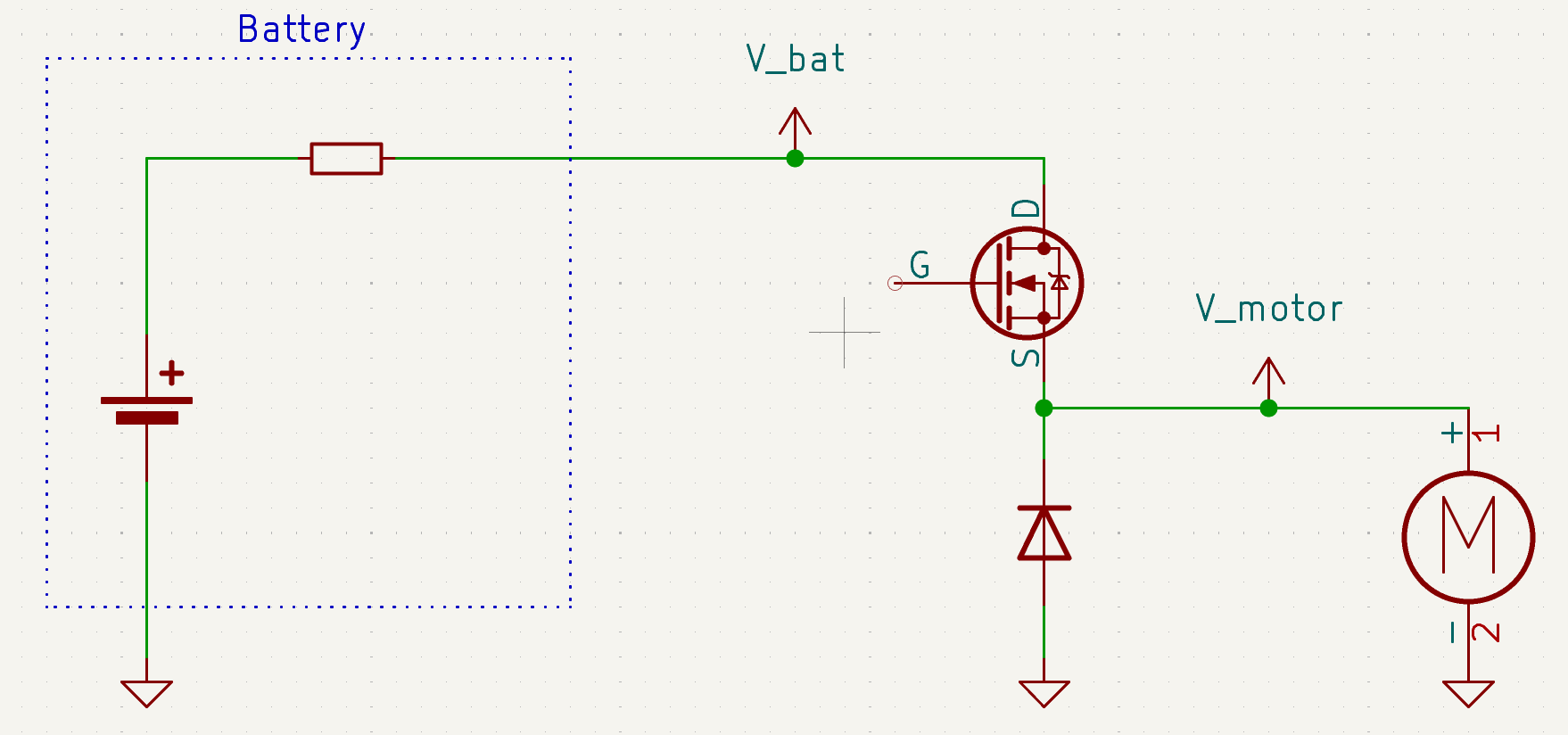
To illustrate the setup, here is a schematic of how the battery, PWM switching, and motor interact, effectively behaving like a simple buck converter:
This means the motor voltage can be computed by:
System Identification
To design a proper compensation, we first needed to understand how thrust relates to motor voltage. This meant running a series of experiments on the thrust stand introduced in this earlier blog post.
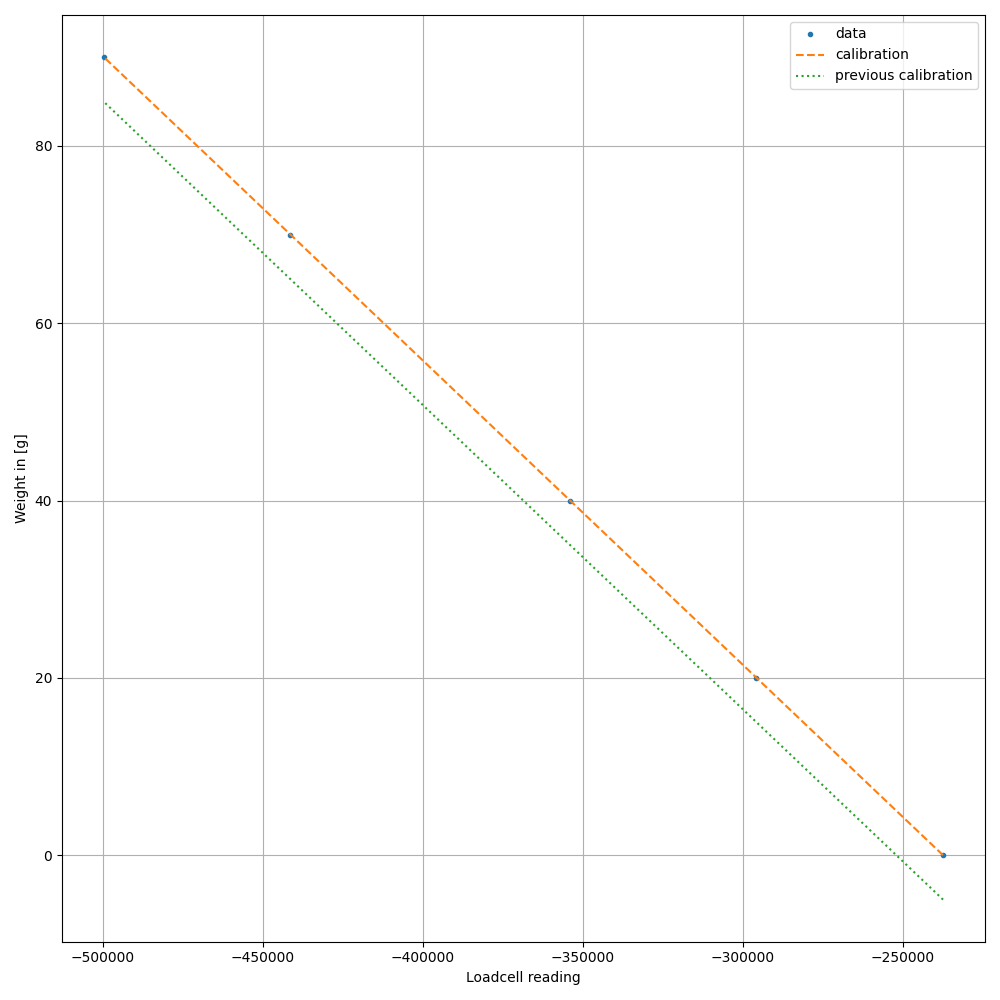
The first step was calibrating the loadcell used to measure thrust:
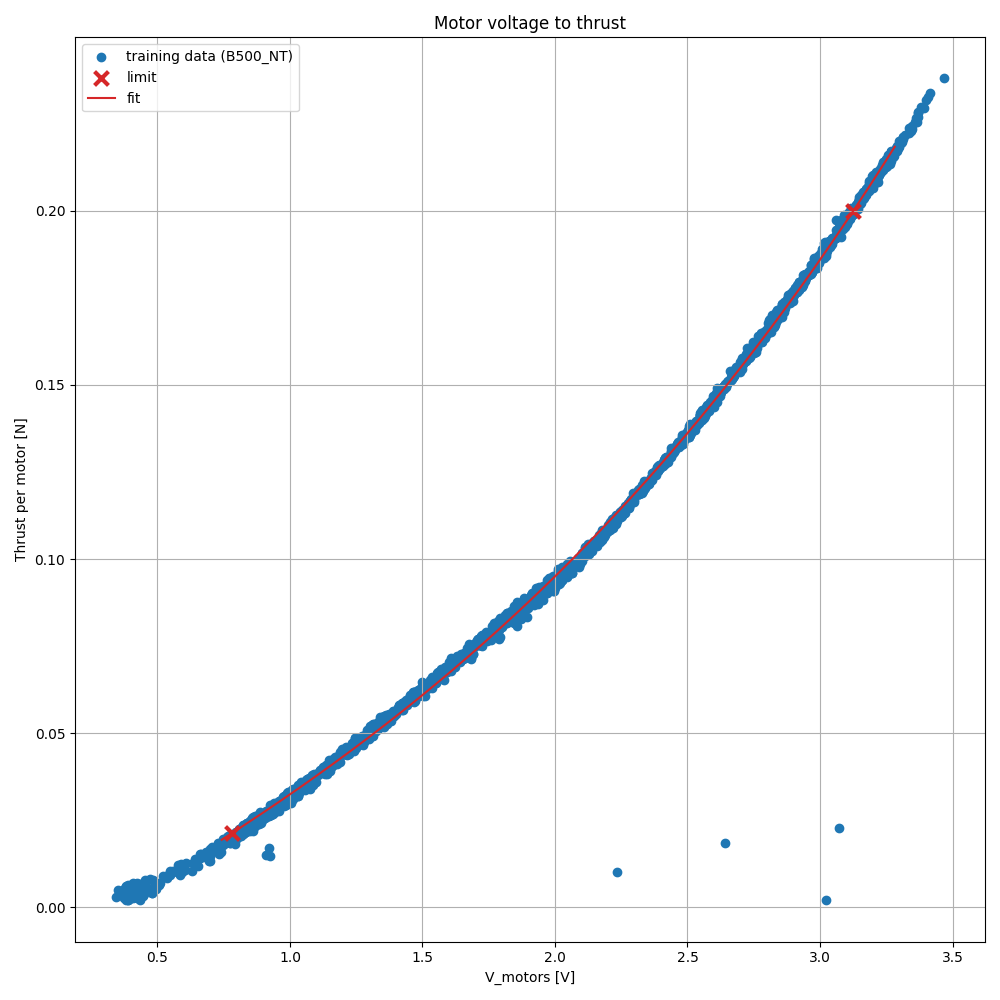
Once calibrated, we measured the thrust at different applied motor voltages.
As expected, the thrust can be modeled well by a third-order polynomial in motor voltage.
Mathematically, the relationship comes from two simple facts:
A DC motor torque is proportional to motor voltage and inversely related to motor speed.
A propeller’s thrust scales approximately with the square of the rotational speed.
Combining these effects leads to a nonlinear (third-order) relation between motor voltage and thrust.
Battery Compensation
The main idea is straightforward: instead of assuming the battery voltage is constant, we explicitly account for it. We can measure the battery voltage and low-pass filter it to reduce noise. Together with the necessary motor voltage from the curve above, we can solve the equation from above for the necessary pwm to apply:
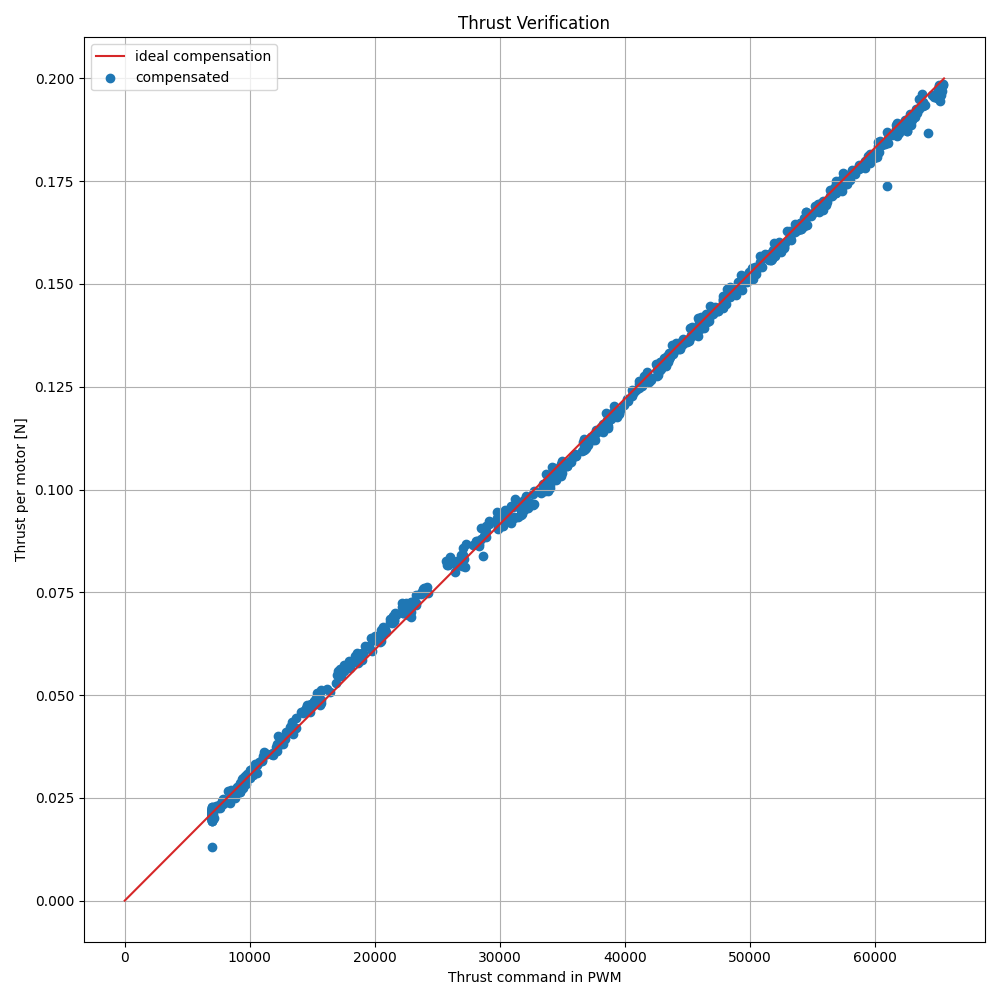
This corrected motor voltage is then fed into our third-order model to compensate the thrust command. With this compensation, the commanded-to-actual thrust relation is now approximately linear, which is exactly what we want. We can verify this by applying thrust commands and comparing them to the actual thrust.
Dynamic Behavior
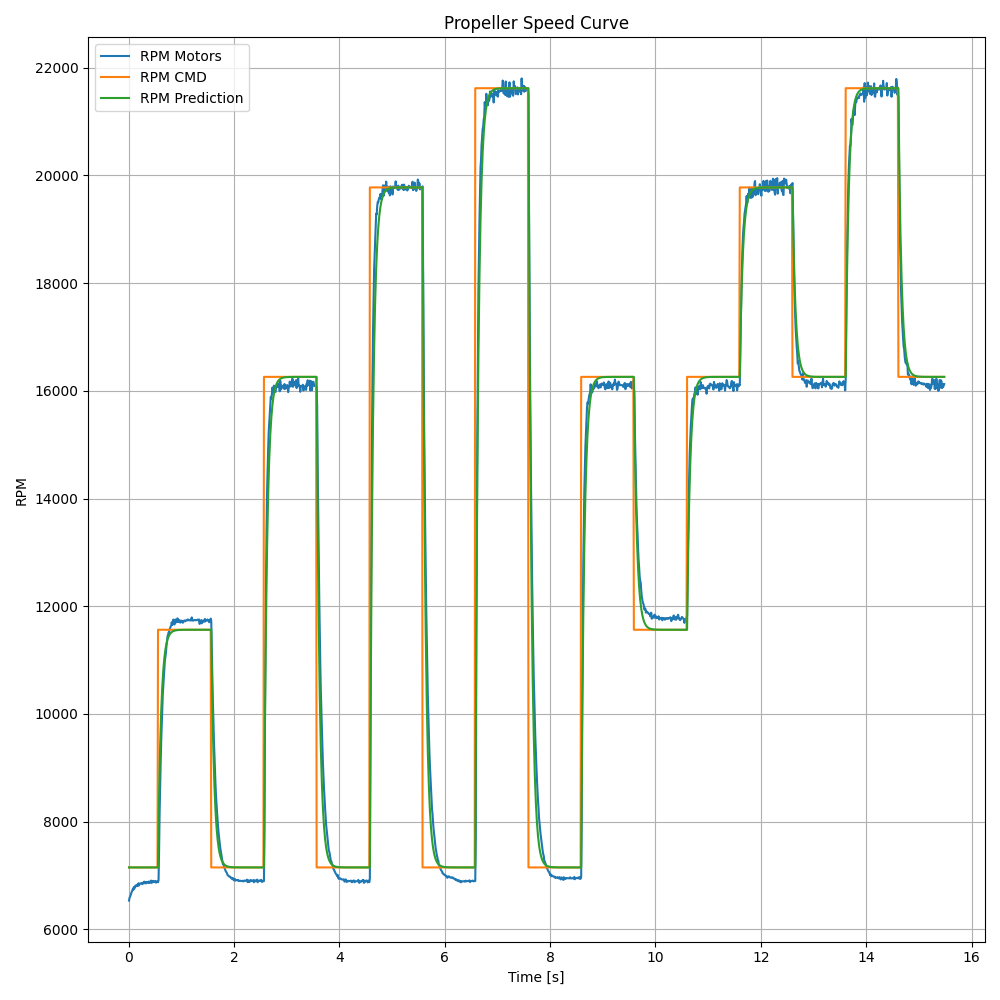
To obtain a complete parameter set of the motors and propellers, we also performed dynamic tests: commanding rapid increases and decreases in PWM and measuring the thrust response.
These dynamics are not required for the battery compensation itself, but they are very useful for accurate system identification and for simulation purposes.
Discussion and Conclusion
The new compensation method (#PR1526), ensures that thrust is consistent across the full range of battery charge. Compared to the old approach, it is both simpler to understand and more faithful to the actual physics of the motor–propeller system. The result is flights that feel the same at the end of the battery as at the beginning.
Beyond just improving flight performance, the system identification work also provides us with a full parameter set for the Crazyflie. We are already using these parameters in Crazyflow, our new simulation tool that models the Crazyflie dynamics with high fidelity. If you’re interested in simulation or in testing new control strategies virtually, check it out!
We’re excited to hear feedback from the community and to see what you do with this new capability.
Setting up a mobile indoor positioning system with the Crazyflie platform—specifically using the Loco Positioning System (LPS)—typically involves walking through a large room with a laser measure, sticky notes, and a bit of patience.
That was exactly my situation at work when setting up UWB anchors for mobile robot demonstrations, which often had to be relocated to different rooms. And it got me thinking—what if there were a more intuitive, flexible way to define and deploy these setups, especially in labs or educational settings where reconfigurability is key?
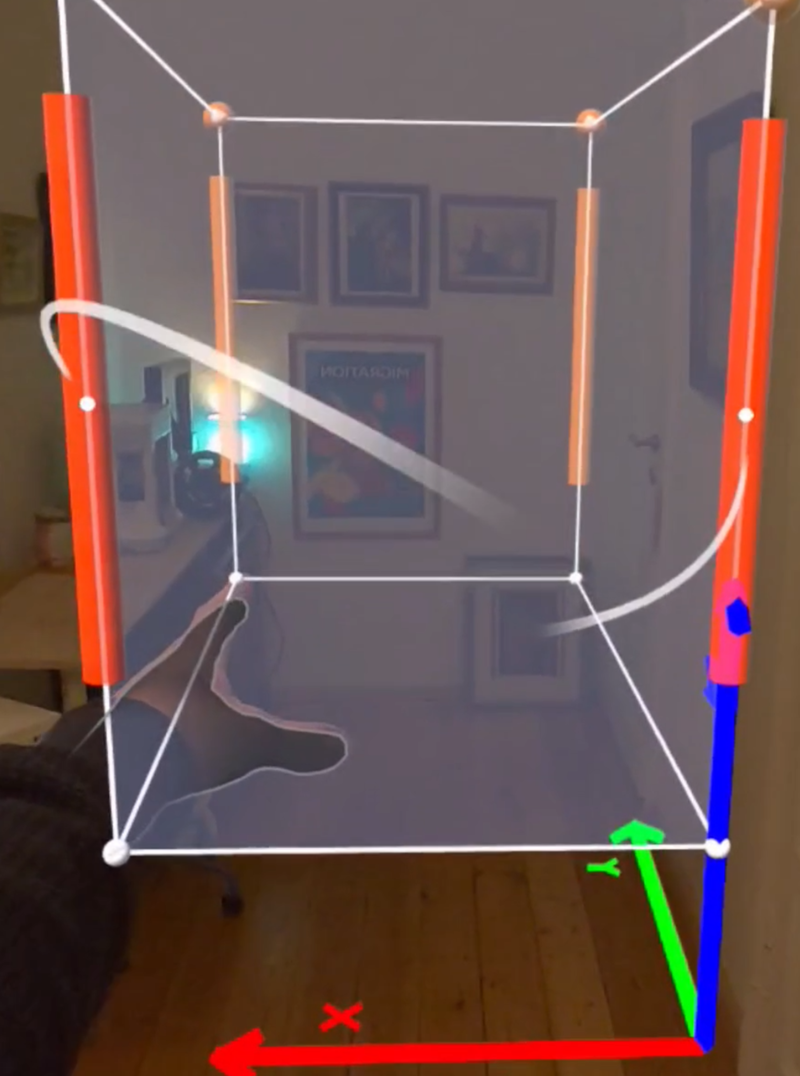
This question led to the development of XR-PALS, a mixed reality tool that simplifies the entire LPS configuration process. Instead of manually measuring anchor positions and inputting coordinates into cfclient, XR-PALS allows users to create and sync virtual and physical setups almost seamlessly—just by moving virtual anchors in space using a VR headset.
Three-step setup process for the Bitcraze Loco Positioning System, illustrating anchor connection, system configuration, and 3D Crazyflie drone tracking.
What is XR-PALS?
XR-PALS (XR-Powered Assistance for Loco Positioning Systems) is a tool we (Victor Victor and Dominik Grzelak) developed for defining cyber-physical spaces using UWB anchors on tripods. It runs on a passthrough VR headset (we used Meta Quest 3), allowing users to visualize the LPS layout and manipulate anchor placements in a virtual 3D environment until they are virtually and physically aligned.
Once everything is aligned, a single tap on the “Export” button sends the virtual anchor positions to a Rust-based middleware service running on a host machine within the same network as the VR headset.
It’s fast, visual, and eliminates the need for hand-measuring coordinates for our mobile robot demonstrators.
You can watch the system in action in our demo video:
Why We Built It
Usually, the LPS setup involves manual measurements and manual data entry in cfclient. This is time-consuming when environments change frequently—as is often the case in education and research.
With XR-PALS, the goals are to:
Speed up setup – Users in our study completed setups significantly faster.
Reduce error – Anchor placement is visual and interactive. No calculations needed.
How It Works
XR-PALS consists of two main components:
VR application Runs on a VR headset and displays the full anchor layout. Users can drag anchors, view distances, toggle info layers, and adjust alignment using natural hand gestures.
Middleware service A Rust-based REST API that basically bridges the VR app with the LPS anchors. This service receives the coordinates and remotely updates the LPS anchors—enabled by the open-source nature of the LPS firmware: bitcraze/lps-node-firmware. Coordinates are exported as YAML that can be imported by cfclient.
System architecture.
User interactions.
Real-World Evaluation
We compared XR-PALS against a traditional laser measurement tool in a user study involving 18 participants from our Faculty of Computer Science. Each participant had to configure a LPS layout (trapezoidal or rectangular) using one of the two tools.
Results:
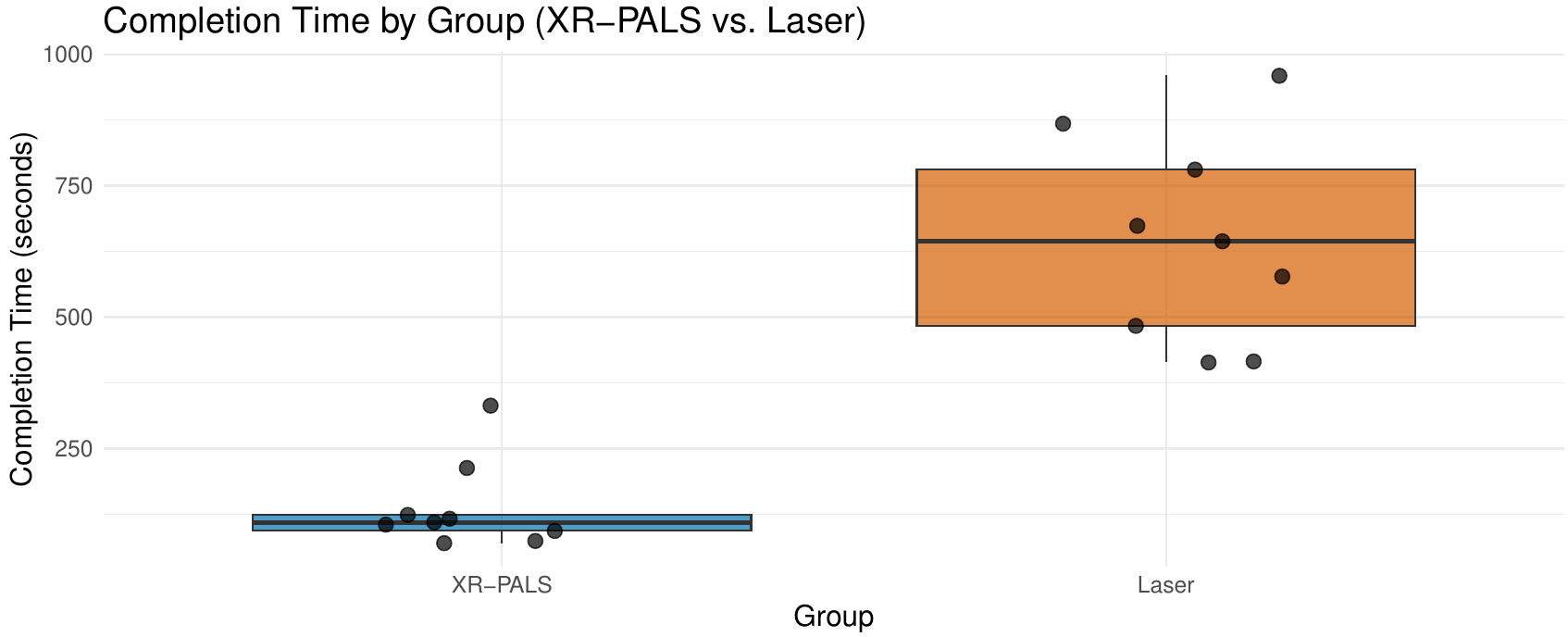
XR-PALS users completed the task faster
Fewer measurement errors
Higher usability scores and confidence
Lower cognitive load, especially for the trapezoidal layout
Bar chart comparing task completion times between XR-PALS and laser.Lower values are better.
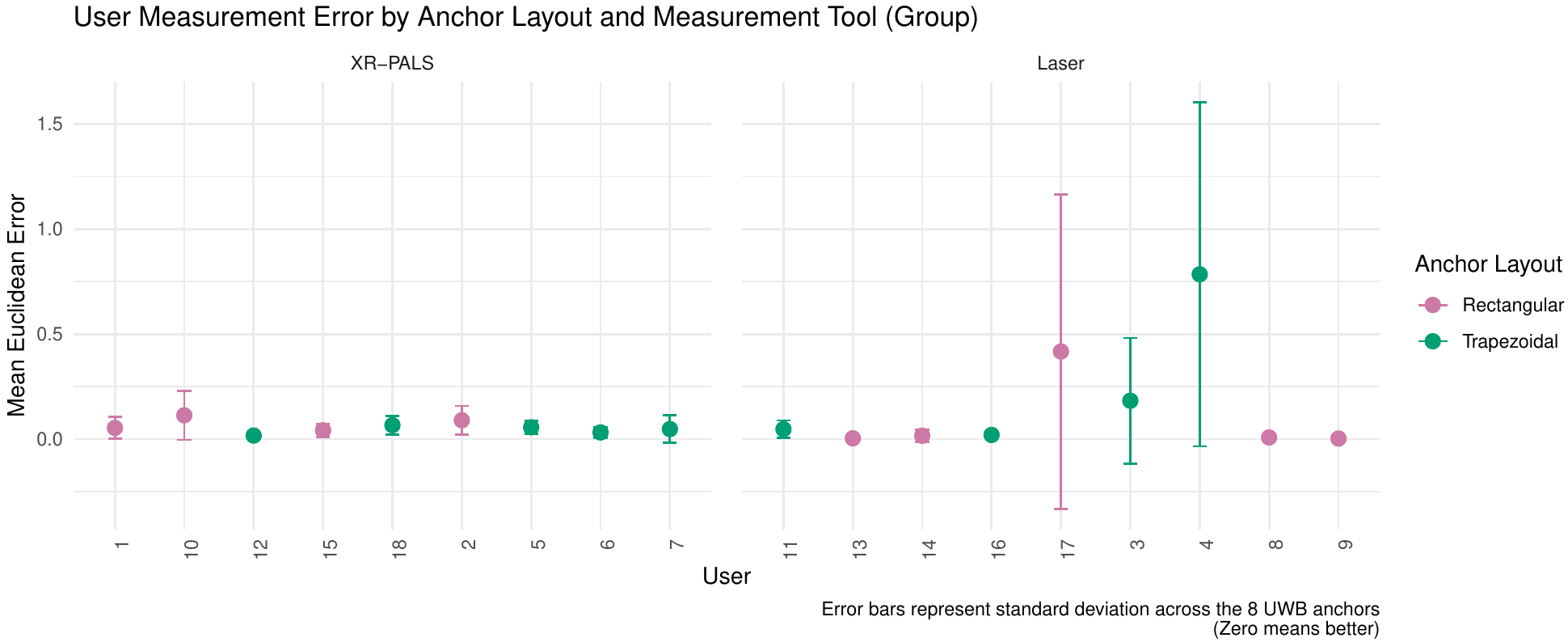
Measurement error comparison between XR-PALS and Laser. Lower values are better.
The minimal loss in accuracy compared to the time saved is not dramatic for our use cases, compared to the time saved—especially when more participants were able to correctly determine the coordinates overall. In general, users were more confident using VR glasses than a laser measurement device.
Summary and What’s Next
So if you’re working with dynamic robot setups or swarm experiments, XR-PALS might save you a lot of setup time.
The app works natively with the Bitcraze Loco Positioning System and, so to speak, extends the capabilities of the cfclient.
Here’s what we’re currently thinking about:
Supporting larger anchor sets within the app (currently limited to 8 anchors)
Improving user interactions based on feedback from our user study
Displaying anchor diagnostics (e.g., latency, power levels)
Simpler layout reusability (layouts can be saved and shared only via the computer)
Unmanned aerial vehicles (UAV) are invaluable to challenging remote applications, including coastal monitoring, surveillance for safe passage in icy waterways, and search-and-rescue missions. However, after deployment in a remote setting, the functional life of the multirotor is ultimately limited by its battery life. The research we continue to investigate is the ability to cooperatively and autonomously land a multirotor on an uncrewed surface vessel (USV) for recharging. We address this problem in real time with safe control algorithms that we apply on a Crazyflie.
Approach
Our approach enables the Crazyflie to cooperatively coordinate, with a simulated USV, a safe landing in severe wave conditions. It is critical to the autonomy of the system that the agents do not know when or where they’re going to land at the outset, they are cooperating in real time to make these determinations. The novelty of this work is three primary contributions:
Learning a Spatial-Temporal Wave Model as a Gaussian Process
We first learn the local tilt model, representative of the spatial and temporal impact of waves on the tilt angle of a USV, using Gaussian Process (GP) regression. Prior to the execution of the landing, the USV collects Nd noisy observations D = {q, t, φ²}, where q is the position of the USV, t is time, and φ is the tilt angle of the USV. We use GP regression to learn the spatial-temporal tilt model: fw(q, t) = (φ(q, t))² . The predicted tilt and uncertainty, conditioned on the observed data D, at a query point a = [q, t] can be inferred using the posterior distribution.
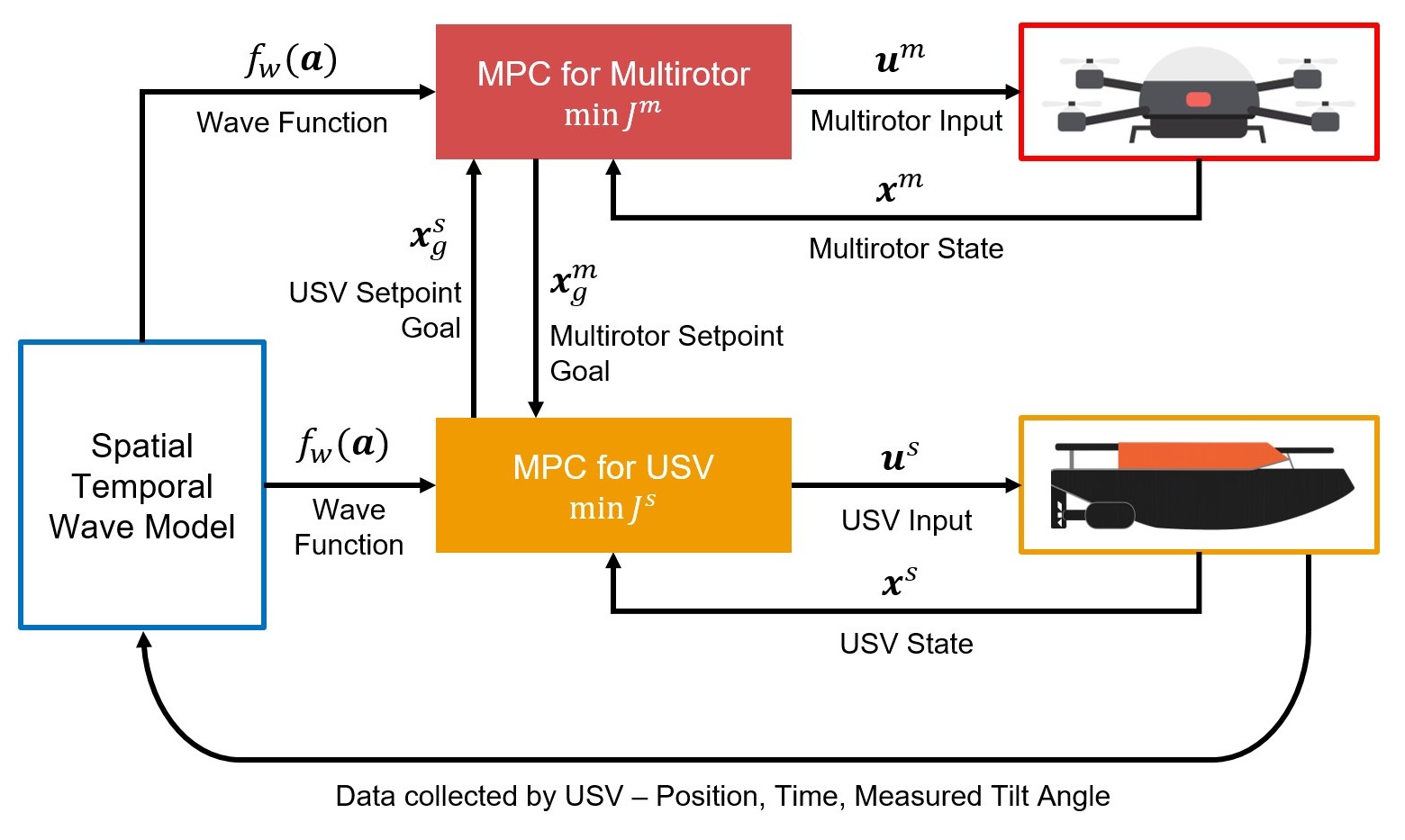
Distributed Model Predictive Control
Our proposed model predictive control (MPC) architecture combines standard tracking MPCs for the Crazyflie and USV and augments them with additional artificial goal locations. These artificial goals enable the vehicles to coordinate without prior guidance. Each vehicle solves an individual optimization problem for both the artificial goal and an input that tracks it but only communicates the former to the other vehicle. The MPC integrates, into the cost functions for both vehicles, the learned mean and uncertainty quantification of the spatial-temporal wave model from the GP regression. This encourages the agents to converge to calmer waters enabling safer landings in variable wave conditions.
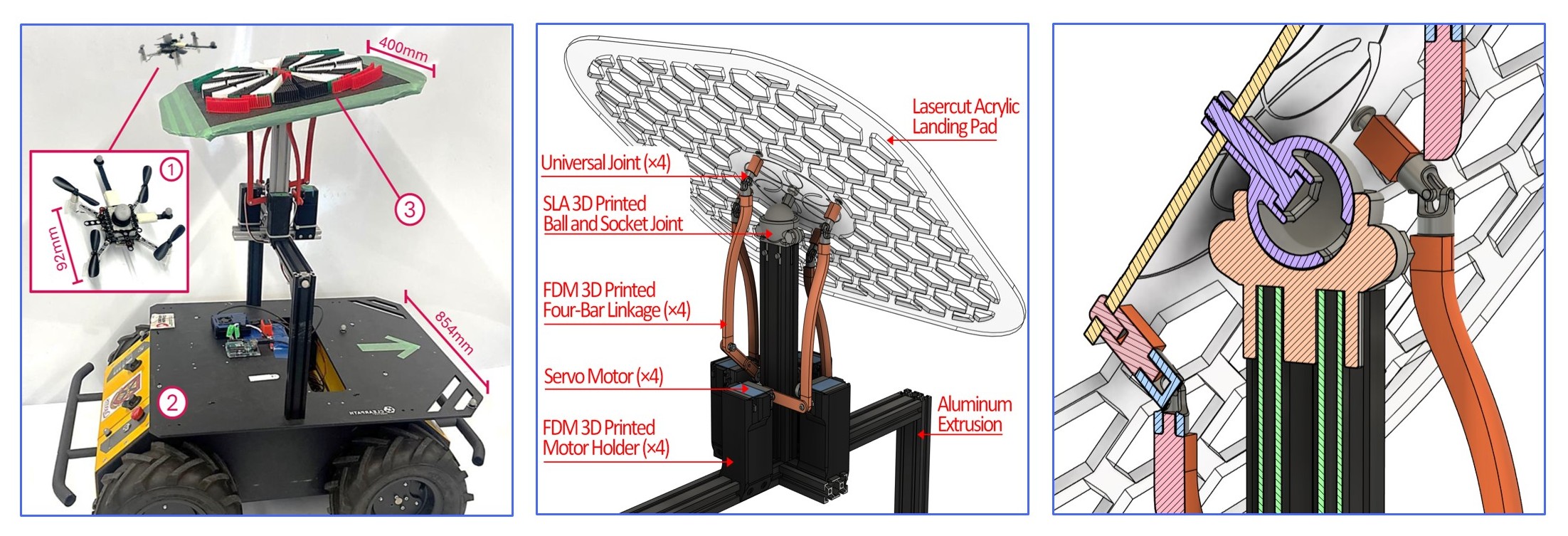
Low-Cost USV Simulation Testbed Platform
To validate the proposed MPC scheme for landing on a USV, we simulate the spatial-temporal motion of a USV in waves of variable intensity using a custom tilting platform. The custom tilting platform has two degrees of freedom (roll, pitch) and is affixed to the deck of a differential-drive unmanned ground vehicle (UGV), the ClearPath Robotics Husky. We selected a differential-drive UGV to replicate the motion of a broad range of USVs, including those with differential drive and conventional rudder steering. Our platform is low-cost, modular, and open source, enabling rapid testing and benchmarking of UAV-USV landing strategies indoors before going onto the water which is high-risk and expensive.
Block diagram of our proposed distributed model predictive control scheme.
Overview of the USV simulation testbed tilting platform for ground vehicles. Left: the platform is shown mounted on the deck of the ClearPath Robotics Husky with the Crazyflie 2.1 hovering above. Center: a closer view of the landing pad configuration and platform components. Right: Section view showing the ball-and-socket joint and the linkage mechanism.
Experimental Setup
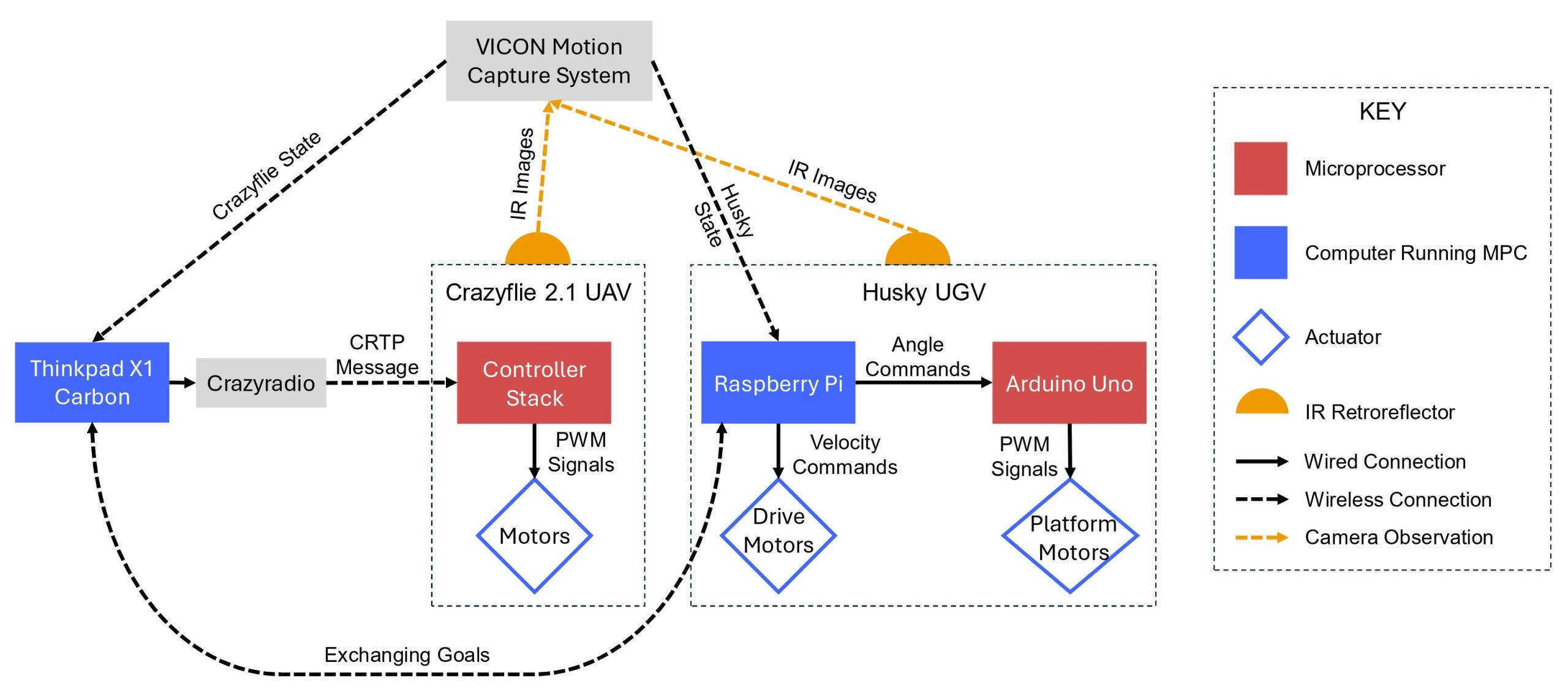
Full system architecture.
We evaluate the proposed MPC scheme for UAV-USV cooperative landing in indoor experiments using the Crazyflie 2.1 and our tilting platform. These experiments represent a scaled-down version of real-world harsh wave conditions. Amplitude and frequency are informed by a survey of waves along the coastlines of the Great Lakes of North America. We select a spatially decaying sine wave whose amplitude decreases gradually with increasing x-position. We expect the Crazyflie and the simulated USV to cooperatively select the safest landing spatially and temporally by learning the GP and incorporating it the MPC scheme.
The UAV MPC is run off-board on a Thinkpad X1 Carbon with Intel Core i7-1270P Processor. The MPC runs at a frequency of 50Hz and transmits control inputs to the Crazyflie via long range Crazyradio USB. The Raspberry Pi onboard the Husky runs its MPC at 10Hz. The two vehicles communicate their goals using ROS topics on a local WiFi network and receive their own pose feedback at 240 Hz from a VICON motion capture system.
Experimental Results
Experiment 1. We define the tilt model. Our proposed distributed MPC scheme can locate a low-tilt landing location from all six initial platform positions.
Experiment 2. We learn the wave model using a GP. The MPC scheme can locate a low-tilt landing location from all three initial platform positions.
In the first set of experiments, we assume no uncertainty in the tilt model. We compare four MPC weighting strategies ranging from a purely cooperative strategy in red (where neither vehicle weights wave tilt in the MPC, neglecting spatial-temporal tilt motion), to our proposed strategy in blue (where both vehicles weight wave tilt highly in the MPC). In this set of experiments, our proposed approach (blue) reduces the tilt angle of the platform at landing by between 68-89% and results in a 53% increase in landing success rate over the purely cooperative strategy (red).
In the second set of experiments, we learn the wave tilt model as a GP. We compare the purely cooperative strategy in red from before to our proposed strategy in blue where we weight the posterior mean cost from the GP regression. In this set of experiments, our proposed approach (blue) reduces tilt angle of the platform at landing by 23-32% and results in a 47% increase in the landing success rate over pure cooperation (red).
Future Work
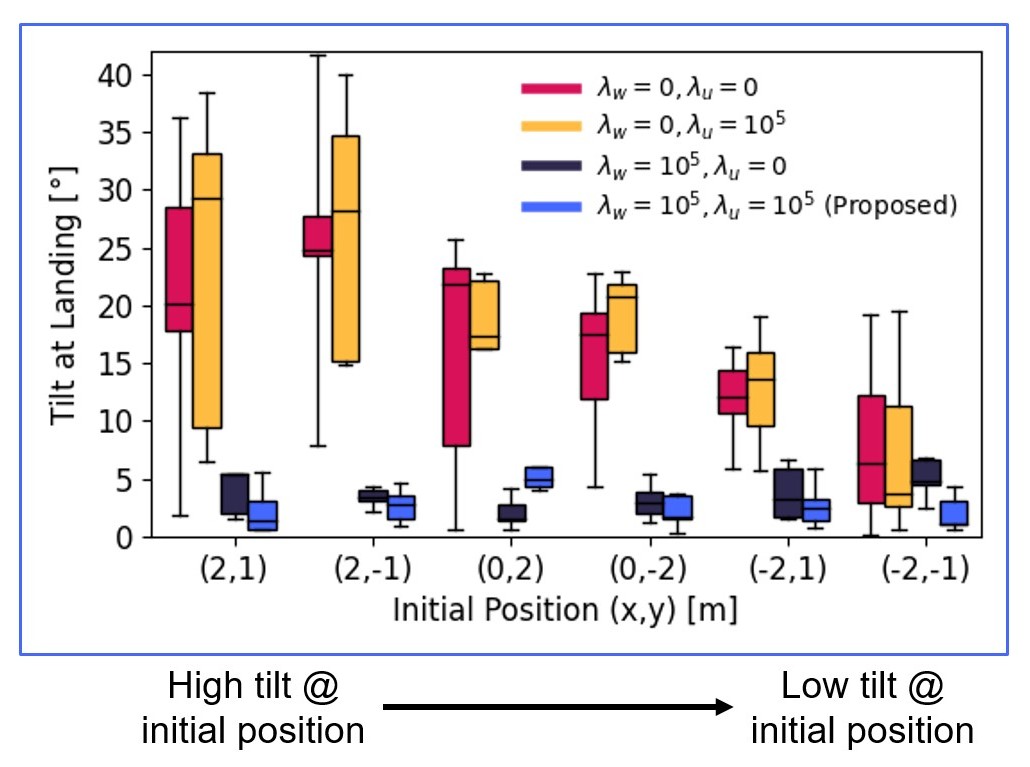
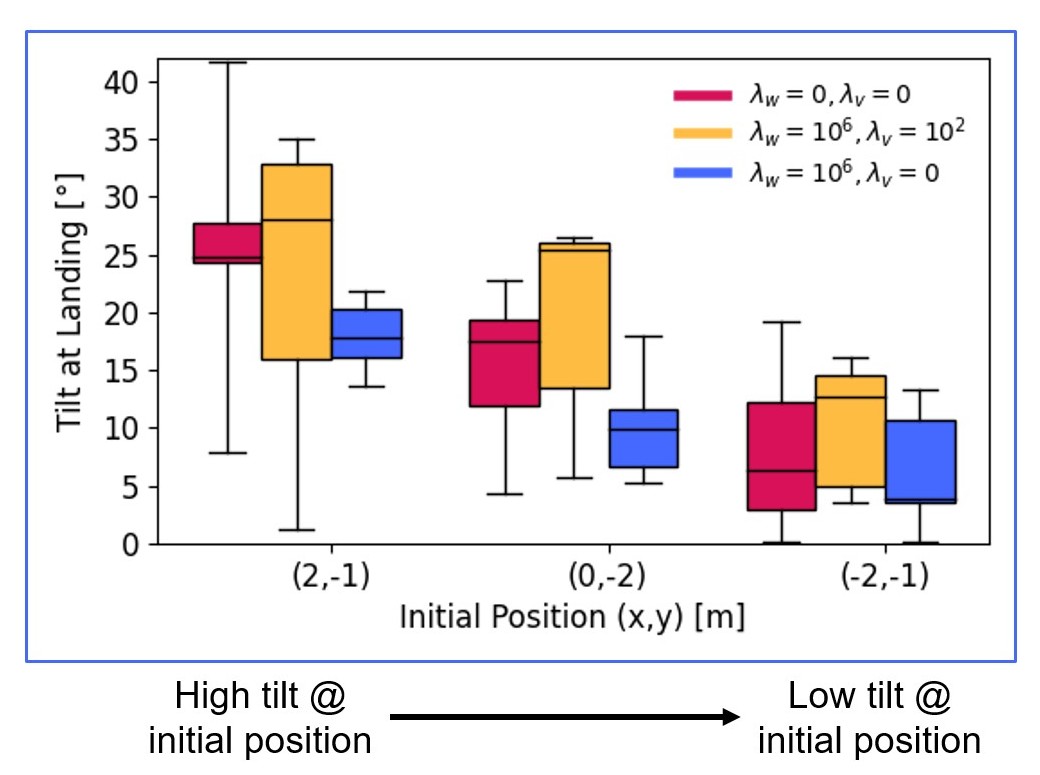
In the work presented above we assume that there is a local region with calm waves that can be reached by both vehicles to then perform a safe landing. However, in practical scenarios, spatial-temporal assumptions are not realistic if an emergency landing is necessary or if time and resources are constrained. Recently, we explored quadratic MPC strategies for landing a Crazyflie on the tilting platform in high frequency high amplitude conditions. In these strategies we include optimization costs that weigh position, attitude, and altitude errors between the multirotor and the platform.
Though all strategies successfully land in low-frequency, low-amplitude conditions, they have low success in the higher-amplitude conditions. Therefore, designing a safe controller that is robust to a wide range of wave amplitudes and frequencies is an ongoing research area.
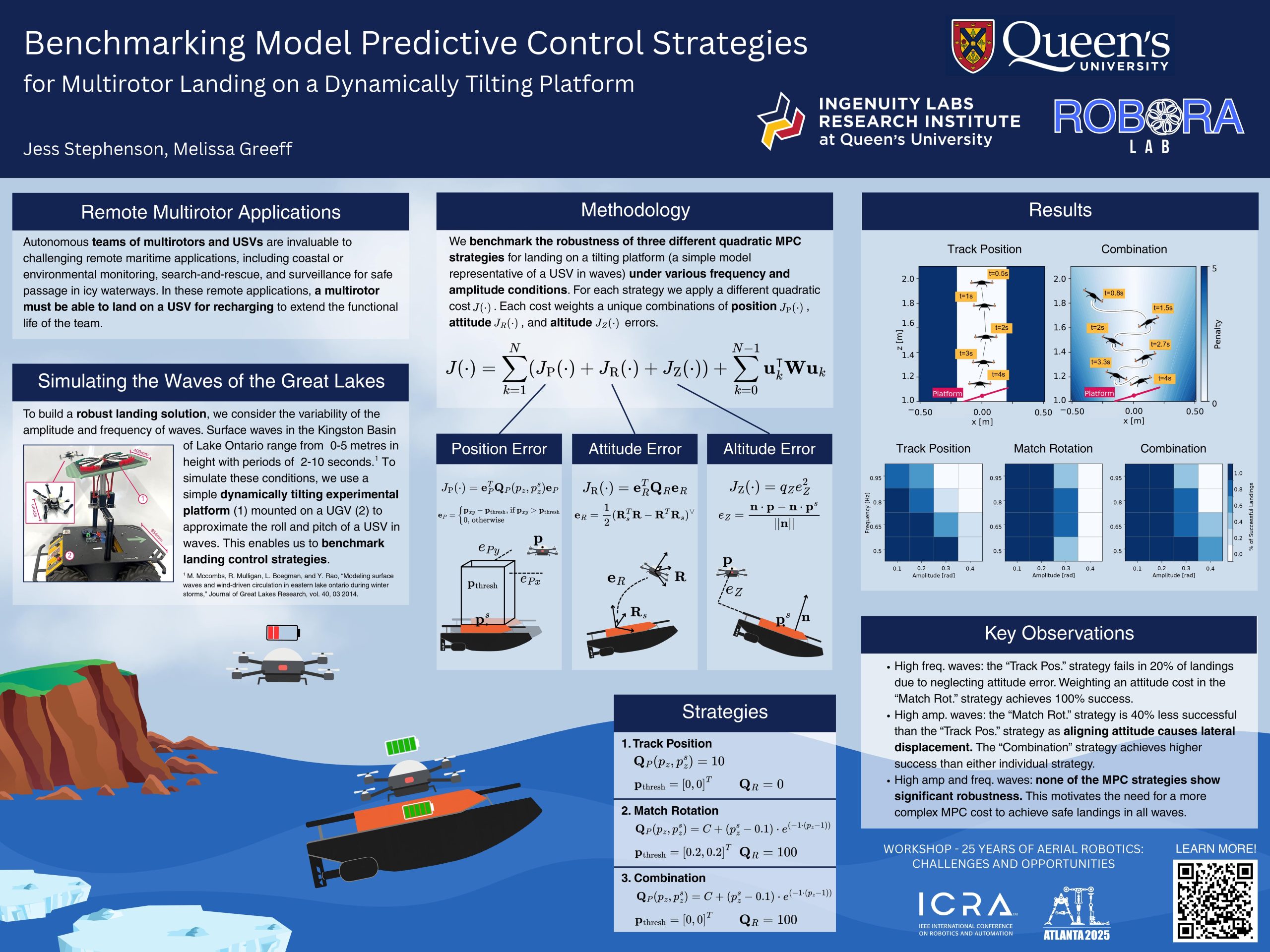
Poster presented at the workshop ’25 Years of Aerial Robotics: Challenges and Opportunities’ at ICRA 2025.
Drones can perform a wide range of interesting tasks, from crop inspection to search-and-rescue. However, to make drones practically attractive they should be safe and cheap. Drones can be made safer by reducing their size and weight. This causes less damage in a collision with people or the environment. Additionally, being cheap means that the drones can take more risk – as it is less expensive to lose one – or that they can be deployed in larger numbers.
To function autonomously, such a drone should at least have some basic navigation capabilities. External position references such as GPS or UWB beacons can provide these, but such a reference is not always available. GPS is not accurate enough in indoor settings, and beacons require prior access to the area of operation and also add an additional cost.
Without these references, navigation becomes tricky. The typical solution is to have the drone construct a map of its local environment, which it can then use to determine its position and trajectories towards important places. But on tiny drones, the on-board computational resources are often too limited to construct such a map. How, then, can these tiny drones navigate? A subquestion of this – how to follow previously traversed routes – was the topic of my MSc thesis under supervision of Kimberly McGuire and Guido de Croon at TU Delft, and my PhD studies. The solution has recently been published in Science Robotics – “Visual route following for tiny autonomous robots” (TU Delft mirror here).
Route following
In an ideal world, route following can be performed entirely by odometry: the measurement and recording of one’s own movements. If a drone would measure the distance and direction it traveled, it could just perform the same movements in reverse and end up at its starting place. In reality, however, this does not entirely work. While current-day movement sensors such as the Flow deck are certainly accurate, they are not perfect. Every time a measurement is taken, this includes a small error. And in order to traverse longer distances, multiple measurements are summed, which causes the error to grow impractically large. It is this integration of errors that stops drones from using odometry over longer distances.
The trick to traveling longer distances, is to prevent this buildup of errors. To do so, we propose to let the drone perform ‘visual homing’ maneuvers. Visual homing is a control strategy that lets an agent return to a location where it has previously taken a picture, called a ‘snapshot’. In order to find its way back, the agent compares its current view of the environment to the snapshot that it took earlier. The trick here is that the difference between these two images smoothly grows with distance. Conversely, if the agent can find the direction in which this difference decreases, it can follow this direction to converge back to the snapshot’s original location.
The difference between images smoothly increases with their distance.
So, to perform long-distance route following, we now command the drone to take snapshots along the way, in addition to odometry measurements. Then, when retracing the route, the drone will routinely perform visual homing maneuvers to align itself with these snapshots. Because the error after a homing maneuver is bounded, there is now no longer a growing deviation from the intended path! This means that long-range route following is now possible without excessive drift.
Implementation
The above mentioned article describes the strategy in more detail. Rather than repeat what is already written, I would like to give a bit more detail on how the strategy was implemented, as this is probably more relevant for other Crazyflie users.
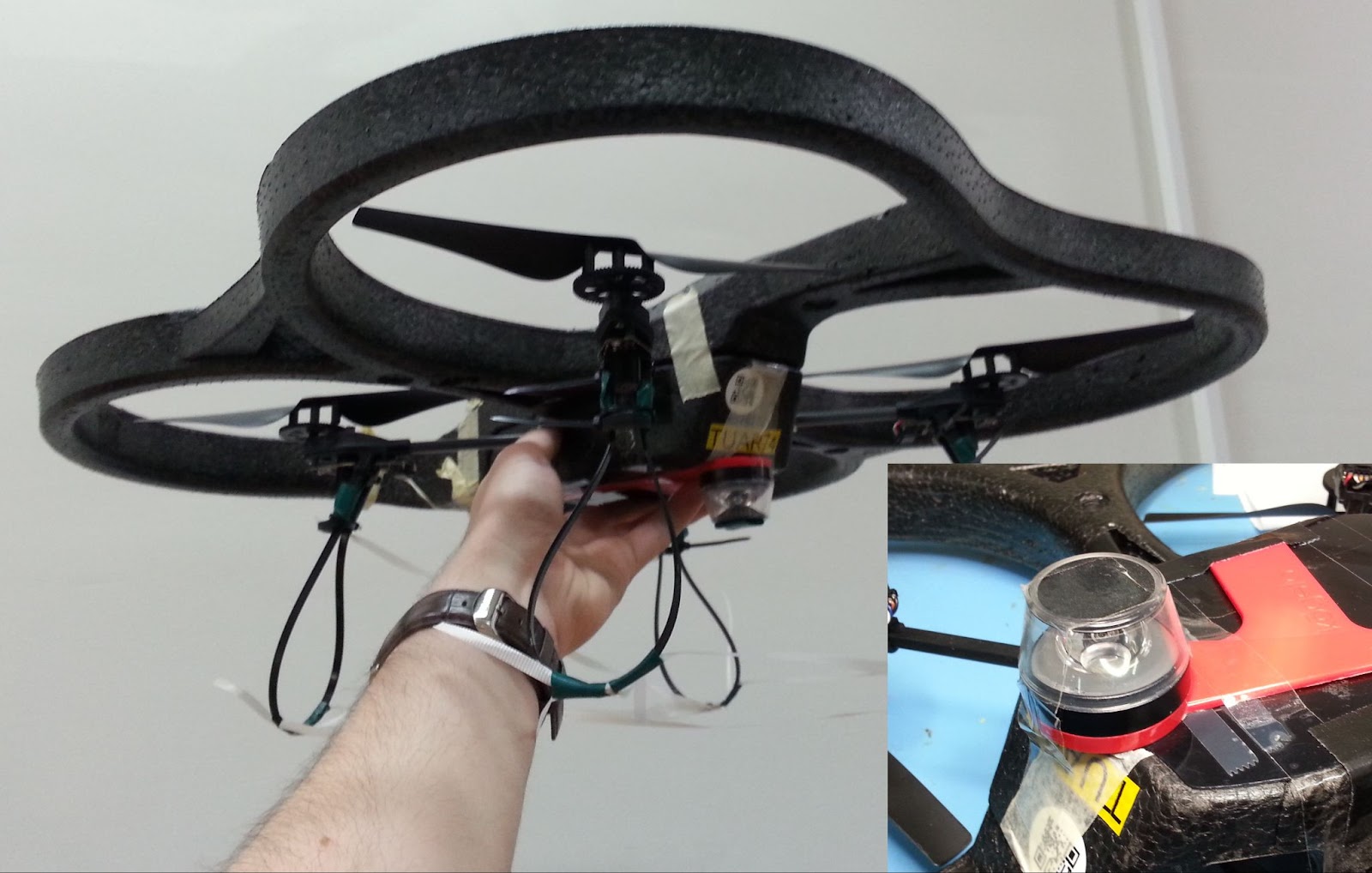
The main difference between our drone and an out-of-the-box one, is that our drone needs to carry a camera for navigation. Not just any camera, but the method under investigation requires a panoramic camera so that the drone can see in all directions. For this, we bought a Kogeto Dot 360. This is a cheap aftermarket lens for an older iPhone that provides exactly the field-of-view that we need. After a bit of dremeling and taping, it is also suitable for drones.
ARDrone 2 with panoramic camera lens.
The very first visual homing experiments were performed on an ARDrone 2. The drone already had a bottom camera, to which we fitted the lens. Using this setup, the drone could successfully navigate back to the snapshot’s location. However, the ARDrone 2 hardly qualifies as small as it is approximately 50cm wide, weighs 400 grams and carries a Linux computer.
Eachine Trashcan with panoramic camera and Flow deck.
To prove that the navigation method would indeed work on tiny drones, the setup was downsized to a Crazyflie 2.0. While this drone could take off with the camera assembly, it would become unstable very soon as the battery level decreased. The camera was just a bit too heavy. Another attempt was made on an Eachine Trashcan, heavily modified to support both the camera, a flowdeck and custom autopilot firmware. While this drone had more than enough lift, the overall reliability of the platform never became good enough to perform full flight experiments.
After discussing the above issues, I was very kindly offered a prototype of the Crazyflie Brushless to see if it would help with my experiments. And it did! The Crazyflie brushless has more lift than the regular platform and could maintain a stable attitude and height while carrying the camera assembly, all this, with a reasonable flight time. Software-wise it works pretty much the same as the regular Crazyflie, so it was a pleasure to work with. This drone became the one we used for our final experiments, and was even featured on the cover of the Science Robotics issue.
Crazyflie Brushless prototype with panoramic camera.
With the hardware finished, the next step was to implement the software. Unlike the ARDrone 2 which had a full Linux system with reasonable memory and computing power, the Crazyflie only has an STM32 microcontroller that’s also tasked with the flying of the drone (plus an nRF SoC, but that is out of scope here). The camera board developed for this drone features an additional STM32. This microcontroller performed most of the image processing and visual homing tasks at a framerate of a few Hertz. However, the resulting guidance also has to be followed, and this part is more relevant for other Crazyflie users.
To provide custom behavior on the Crazyflie, I used the app layer of the autopilot. The app layer allows users to create custom code for the autopilot, while keeping it mostly decoupled from the underlying firmware. The out-of-tree setup makes it easier to use a version control system for only the custom code, and also means that it is not as tied to a specific firmware version as an in-tree process.
The custom app performs a small number of crucial tasks. Firstly, it is responsible for communication with the camera. Communication with the camera was performed over UART, as this was already implemented in the camera software and this bus was not used for other purposes on the Crazyflie. Over this bus, the autopilot could receive visual guidance for the camera and send basic commands, such as the starting and stopping of image captures. Pprzlink was used as the UART protocol, which was a leftover from the earlier ARDrone 2 and Trashcan prototypes.
The second major task of the app is to make the drone follow the visual guidance. This consisted of two parts. Firstly, the drone should be able to follow visual homing vectors. This was achieved using the Commander Framework, part of the Stabilizer Module. Once the custom app was started, it would enter an infinite loop which ran at a rate of 10 Hertz. After takeoff, the app repeatedly calls commanderSetSetpoint to set absolute position targets, which are found by adding the latest homing vector to the current position estimate. The regular autopilot then takes care of the low-level control that steers the drone to these coordinates.
The core idea of our navigation strategy is that the drone can correct its position estimate after arriving at a snapshot. So secondly, the drone should be able to overwrite its position estimate with the one provided by the route-following algorithm. To simplify the integration with the existing state estimator, this update was implemented as an additional position sensor – similar to an external positioning system. Once the drone had converged to a snapshot, it would enqueue the snapshot’s remembered coordinates as a position measurement with a very small standard deviation, thereby essentially overwriting the position estimate but without needing to modify the estimator. The same trick was also used to correct heading drift.
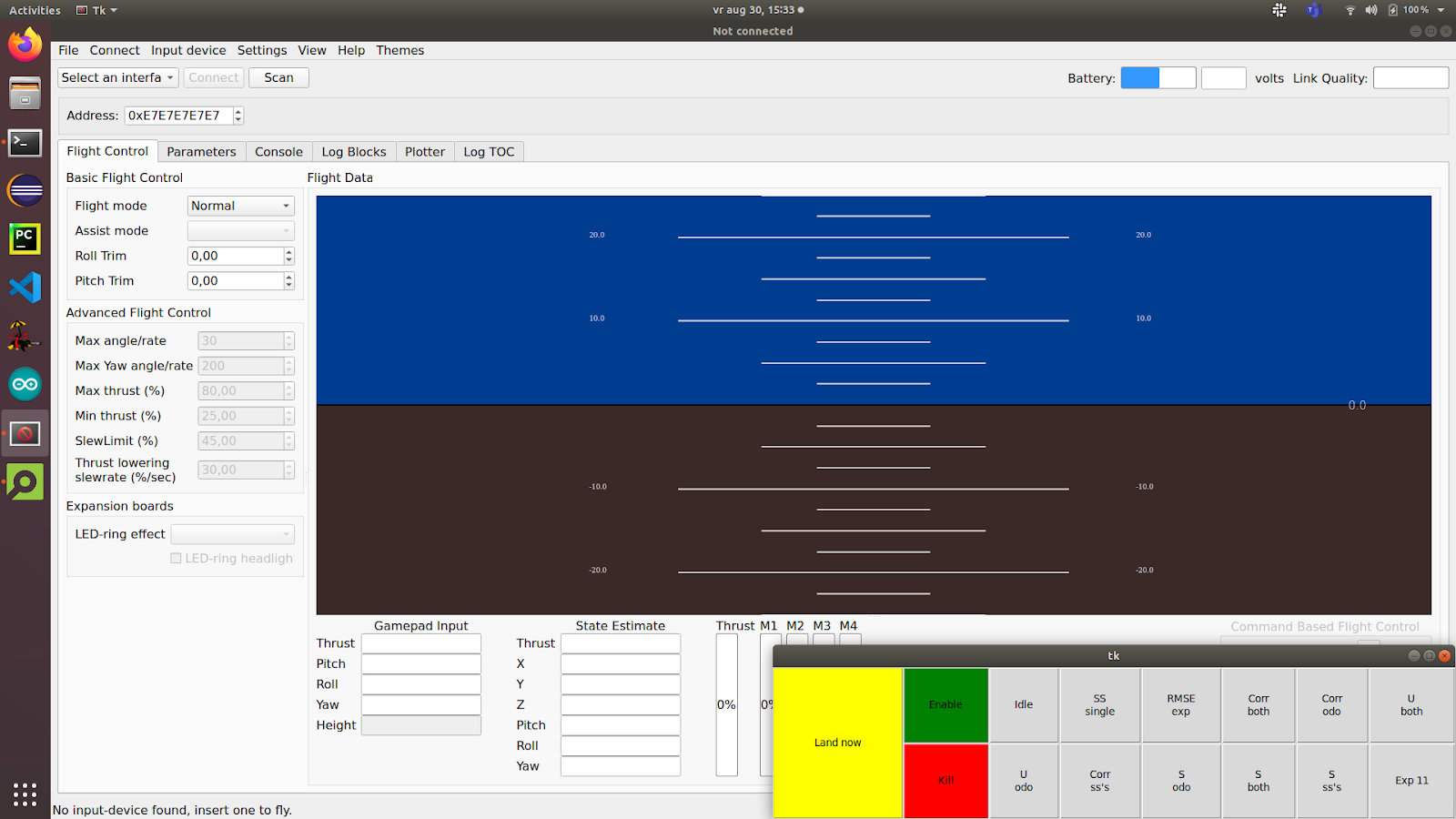
The final task of the app was to make the drone controllable from a ground station. After some initial experiments, it was determined that fully autonomous flight during the experiments would be the easiest to implement and use. To this end, the drone needed to be able to follow more complex procedures and to communicate with a ground station.
Because the cfclient provides most of the necessary functions, it was used as the basis for the ground station. However, the experiments required extra controls that were of course not part of a generic client. While it was possible to modify the cfclient, an easier solution was offered by the integrated ZMQ server. This server allows external programs to communicate with the stock cfclient over a tcp connection. Among the possibilities, this allows external programs to send control values and parameters to the drone. Since the drone would be flying autonomously and therefore low-frequencies would suffice, the choice was made to let the ground station set parameters provided by the custom app. To simplify usability, a simple GUI was made in python using the CFZmq library and Tkinter. The GUI would request foreground priority such that it would be shown on top of the regular client, making it easy to use both at the same time.
Cfclient with experimental overlay (bottom right).
To perform more complex experiments, each experiment was implemented as a state machine in the custom app. Using the (High-level) Commander Framework and the navigation routines described above, the drone was able to perform entire experiments from take-off to landing.
Using the hardware and software described above, we were able to perform the route-following experiments. The drone was commanded to fly a preprogrammed trajectory using the Flow deck, while recording odometry and snapshot images. Then, the drone was commanded to follow the same route in reverse, by traveling short sections using dead reckoning and then using visual homing to correct the incurred drift.
As shown in the article, the error with respect to the recorded route remained bounded. Therefore, we can now travel long routes without having to worry about drift, even under strict hardware limitations. This is a great improvement to the autonomy of tiny robots.
I hope that this post has given a bit more insight into the implementation behind this study, a part that is not often highlighted but very interesting for everyone working in this field.
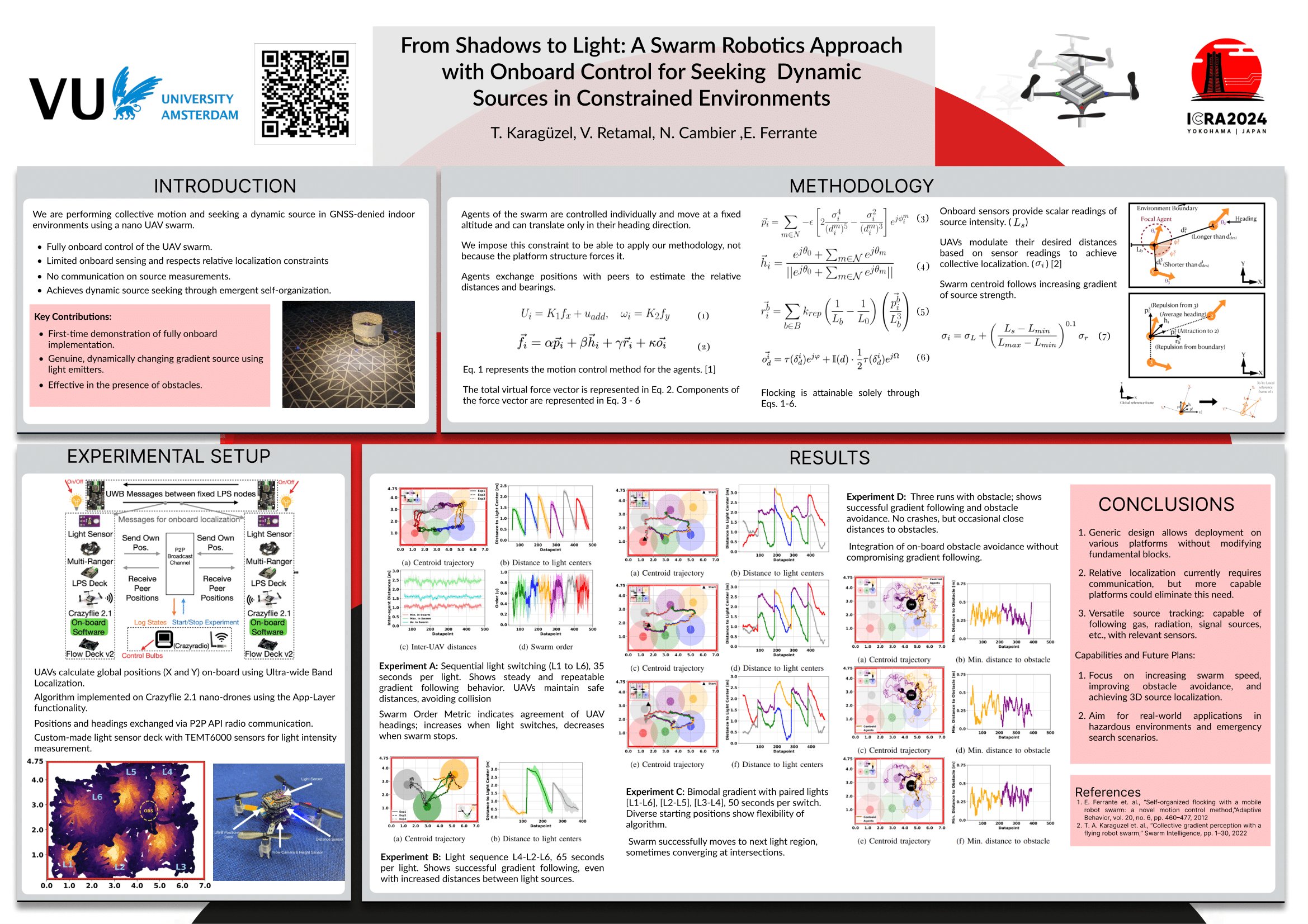
Today, we’re excited to share research from Vrije Universiteit Amsterdam, ‘From Shadows to Light,’ which presents an innovative swarm robotics approach where nano-drones autonomously track dynamic sources indoors.
Motivation
In dynamic and unpredictable indoor environments, locating moving sources—such as heat, gas, or light—presents unique challenges. GPS-denied settings, in particular, demand innovative and efficient onboard solutions for both control and sensing. Our research demonstrates how small drones, like Crazyflies, can be organized into a coordinated swarm to autonomously locate and follow these sources indoors, relying solely on onboard sensing and communication capabilities. Without sharing individual measurements, each drone adapts its behavior in response to its own sensor readings, allowing the swarm to collectively converge on the center of a light source through modified interactions with nearby agents.
Tugay Alperen (right) and Victor Retamal (left) during ICRA 2024 poster session
Method
Our approach enables each Crazyflie to function autonomously, using onboard sensing combined with continuous inter-agent communication at a frequency of 20 Hz. This methodology is structured around three core components:
Proximal Control and Collective Motion
Each drone broadcasts its position to nearby agents, enabling the calculation of relative positions to maintain safe distances. This proximal control ensures cohesive group movement by computing virtual force vectors for velocity commands, which are sent to onboard controllers operating at 20 Hz.
Source Seeking Through Adaptive Social Proximity
Drones use custom light sensors to detect local light intensity. Instead of directly adjusting positions based on this measurement, each drone modifies its social proximity to neighbors according to the sensed intensity without broadcasting this information. This adaptation allows the swarm to collectively follow the light gradient toward the source in a decentralized manner.
Obstacle Avoidance
Equipped with time-of-flight sensors, each drone independently detects obstacles and adjusts its trajectory to maintain safety. This ensures the swarm remains intact while navigating toward the source.
By combining continuous relative positioning, virtual force-based control, individual sensing, and adaptive social behavior, our methodology provides a robust framework for efficient source seeking in GPS-denied indoor environments.
Experimental Setup
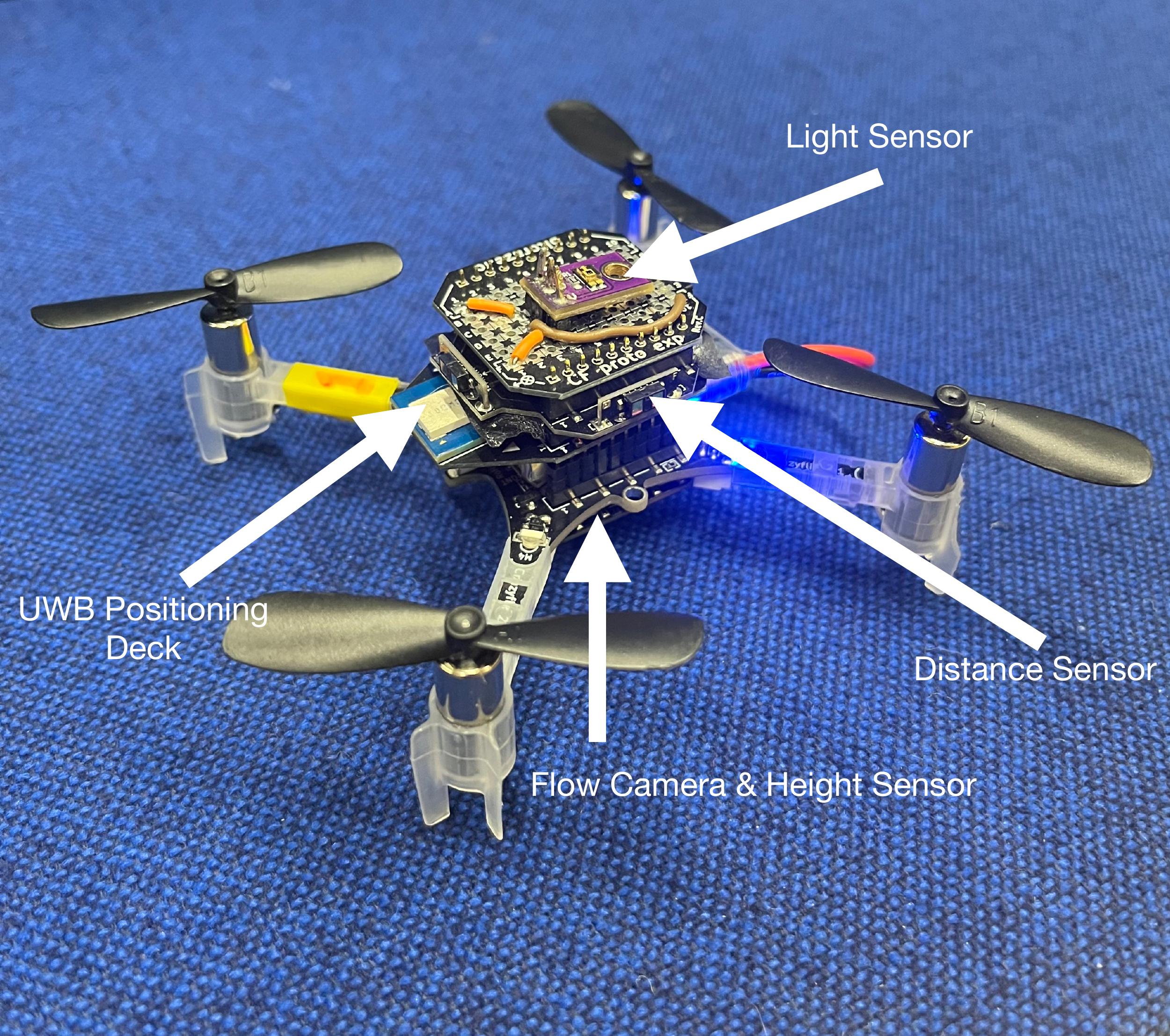
Crazyflie equipped with Flow Deck v2, UWB Deck, Multi-Ranger Deck, and a custom-made deck that produces an analog voltage reading from an LDR for light intensity measurements.
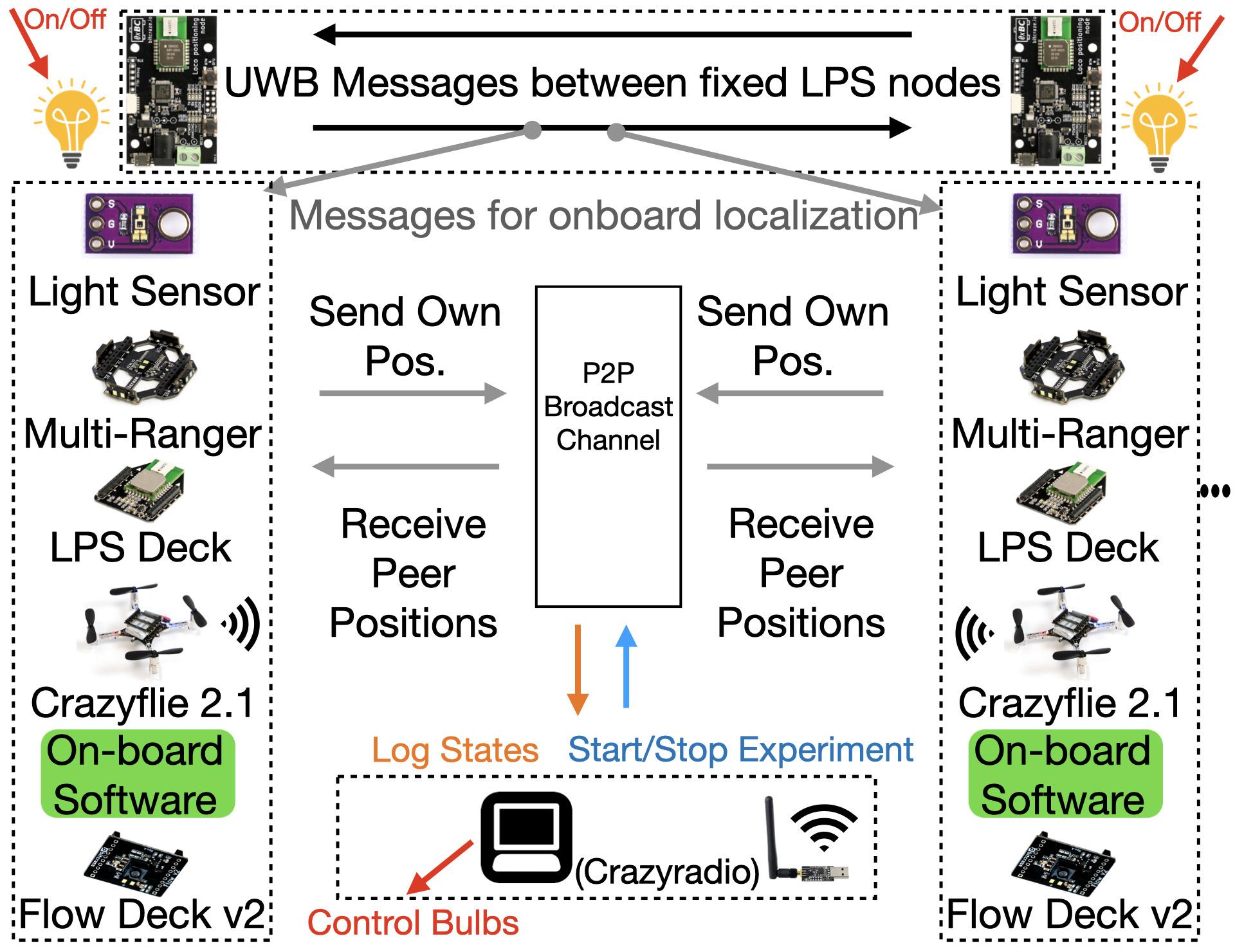
The system architecture allowing us to achieve autonomous flocking and source localization with a swarm of Crazyflie
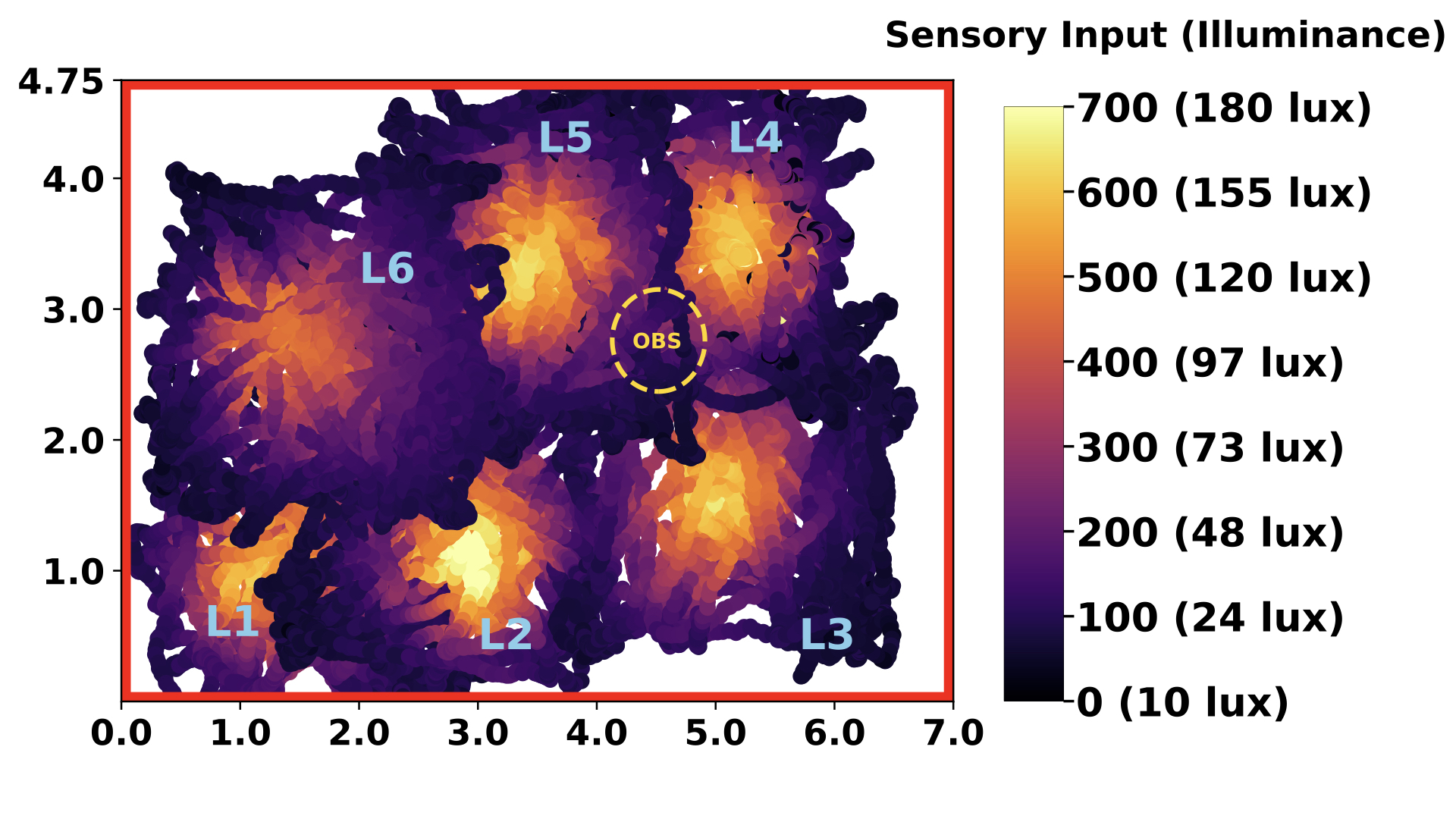
Our experiments take place in a 7×4.75-meter indoor arena with remotely controlled overhead light bulbs. These bulbs, activated individually or in pairs, create a moving light gradient. We tested our flocking swarm by initially positioning them at the edge of an illuminated area. As the light source shifted, we assessed the swarm’s performance by comparing their trajectories with the known centers of the illuminated areas without waiting for full convergence at each step. We also mapped our environment’s light intensity by moving a single Crazyflie randomly around the flight arena and recording the measurements to later merge on a single map to generate this light intensity heatmap.
The brightness values around the test environments, measured for each light source when only it was active.
Results
The flock flies as an ordered swarm, successfully localizing around the source with the swarm’s centroid positioned at the source center. (The centroid appears as a point without an arrow in the video.)
Even with an obstacle present within or between the illuminated regions, the flock successfully localizes around the center, avoiding the obstacle and maintaining order and cohesion within the swarm. The Multi-Ranger deck provides distance measurements for obstacle detection.
Future Directions
As the next step, we plan to apply our highly generalizable algorithm to various source types, including gas sources, radio signals, and similar sources that provide only scalar strength measurements rather than directional cues. Additionally, we have demonstrated that our flocking and source localization algorithms work effectively in 3D. We aim to showcase a fully functional application with a 3D-localized source and a flocking swarm operating in 3D space. Finally, we are working toward achieving fully onboard relative localization, which would eliminate the need for any indoor positioning system. This advancement would allow our swarm to operate autonomously in any environment, replicating the same behavior wherever it is deployed.
The authors were with the Vrije Universiteit Amsterdam.
Please feel free to contact us with any questions or ideas: t.a.karaguzel@vu.nl
Please cite this as:
@ARTICLE{10314746,
author={Karagüzel, Tugay Alperen and Retamal, Victor and Cambier, Nicolas and Ferrante, Eliseo},
journal={IEEE Robotics and Automation Letters},
title={From Shadows to Light: A Swarm Robotics Approach With Onboard Control for Seeking Dynamic Sources in Constrained Environments},
year={2024},
volume={9},
number={1},
pages={127-134},
keywords={Robot sensing systems;Autonomous aerial vehicles;Position measurement;Vehicle dynamics;Sensors;Location awareness;Drones;Swarm robotics;aerial systems: perception and autonomy;multi-robot systems},
doi={10.1109/LRA.2023.3331897}}
This week, we have a guest blog post from Scott at Droneblocks.
DroneBlocks is a cutting-edge platform that has transformed how educators worldwide enrich STEM programming in their classrooms. As pioneers in the EdTech space, DroneBlocks wrote the playbook on integrating drone technology into STEM curriculum for elementary, middle, and high schools, offering unparalleled resources for teaching everything from computer science to creative arts. What started as free block coding software and video tutorials has become a comprehensive suite of drone and robotics educational solutions. The Block-Coding software still remains free to all, as the DroneBlocks mission has always been to empower educators and students, allowing them to explore and lead the way. This open-source attitude set DroneBlocks on a mission to find the world’s best and most accessible micro-drone for education, and they found it in Sweden!
Previously, DroneBlocks had worked alongside drone juggernaut DJI and their Tello Drone. The Tello was a great tool for its time, but when DJI decided to discontinue it with little input from its partners and users, it made the break much easier. The hunt began for a DJI Tello replacement and an upgrade!
Bitcraze’s choice to build Crazyflie as an open platform had their drone buzzing wherever there was curiosity. The Crazyflie was developed to fly indoors, swarm, and be mechanically simplistic. DroneBlocks established that the ideal classroom micro-drone required similar characteristics. This micro-drone needed to be small for safety but sturdy for durability. It also needed to be easy to assemble and simple in structure for students new to drones. Most importantly, the ideal drone needed to have an open line of software communication to be fully programmable. Finally, there had to be an opportunity for a long-lasting partnership with the drone manufacturer, including government compliance.
After extensive searching and testing by DroneBlocks, the Crazyflie was a diamond in the rough – bite-sized and lightweight, supremely agile and accurate, reliable and robust, and most importantly, it was an open-source development platform. The DroneBlocks development team took the Crazyflie for a spin (or several) and with excitement, it was shared with the larger curriculum team to be mined for learning potential. It was promising to see Crazyflie’s involvement in university-level research studies, which proved it meant business. DroneBlocks knew the Crazyflie had a lot going for it – on its own. The team imagined how, when paired with DroneBlocks’ Block Coding software, Flight Simulator, and Curriculum Specialists, the Crazyflie could soar to atmospheric heights!
Hardware? Check. Software? Check. But what about compatibility? DroneBlocks was immediately drawn to the open communication and ease of conversation with the Bitcraze team. It was obvious that both Bitcraze and DroneBlocks were born from a common thread and shared a mutual goal: to empower people to explore, investigate, innovate, research, and educate.
DroneBlocks has since built a new Block Coding interface around the Crazyflie, allowing students to pilot their new drone autonomously and learn the basics of piloting and coding concepts. This interface is offered with a brand new drone coding simulator environment so students can test their code and fly the Crazyflie in a virtual classroom environment.
The Crazyflie curriculum currently consists of courses covering building, configuring, and finally, programming your drone with block coding (DroneBlocks) and Python. DroneBlocks’ expert curriculum team designed these courses to enable learners of all ages and levels to learn step by step through video series and exercises. New courses around block coding and Python are in constant development and will be continuously added to the DroneBlocks curriculum platform.
Crazyflie Drones now headline DroneBlocks’ premiere classroom launch kit. The DroneBlocks Autonomous Drones Level II kit encompasses everything a middle or high school would need to launch a STEM drone program, including the hardware, necessary accessories, and safety wear paired with the DroneBlocks software and curriculum. As a result, thousands of new students have entered the world of Drones and programming thanks to the Bitcraze + DroneBlocks partnership.
DroneBlocks has become an all-inclusive drone education partner for engaging and innovative learning experiences—and the Crazyflie delivers this by being a cutting-edge piece of hardware in a clever package.
Today we welcome Sam Schoedel and Khai Nguyenfrom Carnegie Mellon University. Enjoy!
We’re excited to share the research we’ve been doing on model-predictive control (MPC) for tiny robots! Our goal was to find a way to compress an MPC solver to a size that would fit on common microcontrollers like the Crazyflie’s STM32F405 while being fast enough to control the higher frequency dynamics of smaller robots. We came up with a few tricks to make that happen and dubbed the resulting solver TinyMPC. When it came time for hardware experiments, using the Crazyflie just made sense. A tiny solver deserves a tiny robot.
Motivation
Model predictive control is a powerful tool for controlling complex systems, but it is computationally expensive and thus often limited to use cases where the robot can either carry enough computational power or when offboard computing is available. The problem becomes challenging to solve for small robots, especially when we want to perform all of the computation onboard. Smaller robots have inherently faster dynamics which require higher frequency controllers to stabilize, and because of their size they don’t have the capacity to haul around as much computational power as their larger robot counterparts. The computers they can carry are often highly memory-constrained as well. Our question was “how can we shrink the computational complexity and memory costs of MPC down to the scale of tiny robots?”
What We Did
We settled on developing a convex model predictive control solver based on the alternating direction method of multipliers. Convex MPC solvers are limited to reasoning about linear dynamics (on top of any other convex constraints), but have structure that TinyMPC exploits to solve problems efficiently. The tricks we used to achieve this efficiency are described in the paper, but it boils down to rewriting the problem as a constrained linear-quadratic regulator to reduce the memory footprint and then precomputing as many matrices as possible offline so that online calculations are less expensive. These tricks allowed us to fit long-time horizon MPC problems on the Crazyflie and solve them fast enough for real-time use.
What TinyMPC Can Do
We decided to demonstrate the constraint-handling capabilities of TinyMPC by having the Crazyflie avoid a dynamic obstacle. We achieved this by re-computing hyperplane constraints (green planes in the first video) about a spherical obstacle (transparent white ball) for each knot point in the trajectory at every time step, and then by solving the problem with the new constraints assuming they stayed fixed for the duration of the solve.
In the two videos below, the reference trajectory used by the solver is just a hover position at the origin for every time step. Also, the path the robot takes in the real world will never be exactly the same as the trajectory computed by the solver, which can easily result in collisions. To avoid this, we inflated the end of the stick (and the simulated obstacle) to act as a keep-out region.
TinyMPC is restricted to reasoning about linear dynamics because of its convex formulation. However, a simple linearization can be taken pretty far. We experimented with recovering from different starting conditions to push the limits of our linear Crazyflie model and were able to successfully recover from a 90 degree angle while obeying the thrust commands for each motor.
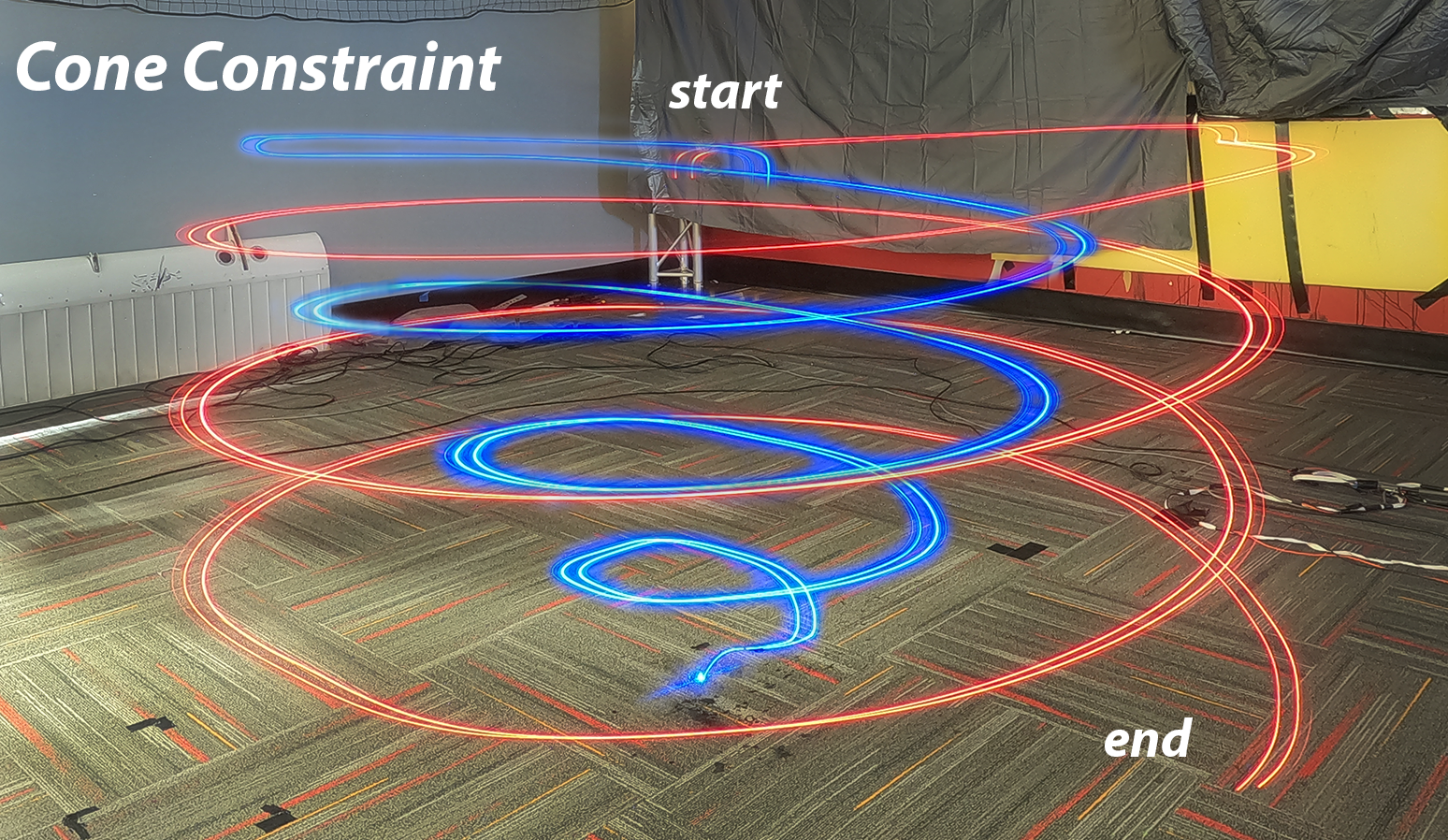
We recently added support for second-order cone constraints as well. These types of constraints allow TinyMPC to reason about friction and thrust cones, for example, which means it can now intelligently control quadrupeds on slippery surfaces and land rockets. To clearly demonstrate the cone constraint, we took long exposure photos of the Crazyflie tracking a cylindrical landing trajectory without any cone constraints (red) and then with a spatial cone constraint that restricts the landing maneuver to a glide slope (blue).
How To Use TinyMPC
All of the information regarding the solver can be found on our website and GitHub org (which is where you can also find the main GitHub repository). TinyMPC currently has a Python wrapper that allows for validating the solver and generating C++ code to run on a robot, and we have a few examples in C++ if you don’t want to use Python. Our website also explains how to linearize your robot and has some examples for setting up the problem with a linear model, solving it an MPC loop, and then generating and running C++ code.
Most importantly to the Crazyflie community, our TinyMPC-integrated firmware is available and should work out of the box. Let us know if you use it and run into issues!
Our accompanying research papers:
Khai Nguyen, Sam Schoedel, Anoushka Alavilli, Brian Plancher, and Zachary Manchester. “TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers.” arXiv preprint arXiv:2310.16985 (2023). https://arxiv.org/pdf/2310.16985
Sam Schoedel, Khai Nguyen, Elakhya Nedumaran, Brian Plancher, and Zachary Manchester. “Code Generation for Conic Model-Predictive Control on Microcontrollers with TinyMPC.” arXiv preprint arXiv:2403.18149 (2024). https://arxiv.org/pdf/2403.18149
We would love your feedback and suggestions, and let us know if you use TinyMPC for your tiny platforms!