November is always a tough month in Sweden, when the darkness deepens and the cold begins to bite. We had our first snow last week, a sudden reminder that winter has arrived. So instead of letting the gloom settle in, we decided to turn to what makes us feel good: pretty lights, pretty trees, and pepparkakor!
I realized that, although we talked about it last year, we never fully showed our big new flight arena once it was up and running. It made an appearance in our latest Christmas video, but was actually never fully revealed before. Capturing a 110square meters space in a single photo is no small feat, but here is my best shot:
It felt the right time to make the office feel a little more wintery. It may be a little early, but we couldn’t resist the charm of festive decorations and a cozy atmosphere to brighten up the dark days. Especially now that we’re more settled into our massive flight arena – a space this large calls for many more Christmas lights! Of course, there’s more to it than just creating a Netflix-Christmas-movie vibe—we’re also gearing up for two big events: our annual Christmas party, which will be hosted here, and the filming of our newest Christmas video!
Speaking of Christmas video, that’s exactly what we’ll be diving into during our next dev meeting! We recently had a great time revisiting how we’ve used demos to guide development – if you missed that particular dev meeting, you can see it here. We thought it would be a great idea to dedicate our next session to exploring all the Christmas videos we’ve created over the years. It’s fascinating to see how our Christmas projects have evolved over time and we hope you’ll join us to reminisce about it Wednesday 11th of December at 15.00 (CET). You’ll find all the info here.
It’s been a while since I last talked about hiring! We successfully onboarded our most recent recruit, and now it’s time to start planning for the future.
One of our challenges as a team is that we’re very heavy on engineers and developers. While that’s fantastic for building products, it means we lack expertise in other important areas. That’s why we’re now shifting our focus to bringing in talent to help fill those gaps. We’ve partnered with a recruitment agency once again to help us find the right people for the job. We’re currently hiring for two distinct roles—here’s what we’re looking for!
Technical sales lead
You will be responsible for developing and implementing sales strategies while exploring both new and existing markets. You’ll take the lead in driving sales and acquiring new customers, becoming the company’s go-to expert on marketing and sales tactics. Your day-to-day tasks will include supporting business development, optimizing sales processes, and proposing effective marketing strategies. This role is perfect for someone with a background in technical sales with a strong strategic mindset and a sense of responsibility.
We’re looking for a Technical Success Engineer to provide our customers with technical guidance and product expertise. This role involves offering first-line support, creating documentation and tutorials, and assisting with tech-focused sales efforts. The goal is to ensure a smooth and seamless customer experience while building strong client relationships. It’s an ideal position for a “social developer”—someone with a solid technical background who also excels in communication and enjoys engaging with others.
Both positions are full-time and based at our office in Malmö, Sweden. If you’re curious about why you should join our team, I’ve already shared some of the many reasons why I love being part of Bitcraze.
If you’re interested or have any questions, please send an email to fredric.vernqvist@techtalents.se or contact us at contact@bitcraze.se.
There is one thing that has driven both the hardware/software and our enthusiasm forward in the last 13 years, and that is making demos! Whether it’s a new piece of hardware/deck for the Crazyflie or the integration with an existing software framework, it doesn’t matter, but we have got to show it and, by all means… it needs to fly!
We have used fairs, conferences, and online meetings as perfect opportunities to push the capabilities of the little Crazyflie to the fullest. Of all the development goals we set, those self-made deadlines and over-ambitiousness have pushed both the hardware and software to the limit. In this blog post, we will take a look back at all of those demos we’ve done in the past and what we have learned from them.
2013 – 2017: Hacker and Developer Fairs
One of the very first conferences we were invited to was Devoxx in the UK. This was back in 2013, and we flew the Crazyflie (1) with an FPV camera over the actual crowd (blogpost, video), which was something we had already been working on for about half a year before showing it at the conference (blogpost, video). A year later, at Devoxx France (2014), they let us fly at the actual exhibition and over the booths, which showed much better quality (blogpost, video)! Not sure if they would still let us do this at fairs, but back then it was a bit of a wild west :D.
By the time the Crazyflie 2.0 was released, we started going to Makerfaires and even visited 3 of them, all in 2015! At the Makerfaire in the Bay Area (blogpost), New York, and Berlin (blogpost 1, blogpost 2), we prepared an external positioning system with the Kinect 2 and augmented reality markers (ArUco) (blogpost). That was one hectic year, and not without issues with the demo itself along the way (blogpost), but it showcased the Crazyflie and pushed the Crazyflie Python library and client to a more mature state.
Once 2016 came, the ultra-wideband positioning hacks reached a point where we could start demoing them as well. At first, the positioning was still calculated offboard with a ROS(1) node and transmitted to the Crazyflie, which was first showcased at Makerfaire Berlin 2016 (blogpost, video) at the booth itself. Eventually, a live demo was given at FOSDEM 2017 in the actual devroom for Embedded, Mobile, and Automotive (talk page). The Flowdeck was also in development at that time, and we had a small tabletop demo at Makerfaire Shenzhen 2017, where people could press a button, and the Crazyflie would take off, fly a circle, and land again (blogpost, video).
2017 – 2019: Academic Robotics Conferences
From 2017, we made it a habit to also meet with our research users, so we started going to academic robotics conferences as well, starting with ICRA 2017 in Singapore. Here, we showcased the Loco Positioning System, where the positioning was estimated onboard, so no external computer was required to perform the calculations (blogpost, video).
At IROS 2018, we took it up a notch by joining our collaborator Qualisys, showcasing the Loco Positioning System for a swarm, Motion Capture-based localization, and the brand new Lighthouse positioning prototype (blogpost 1, blogpost 2). We also added autonomous charging to it as well, so it was a great deal of work! Maybe we took on a bit too much, but one thing is for sure—we learned a lot by doing it (blogpost 1, blogpost 2, video)! With ICRA and IROS 2019, we perfected the circling swarm demo so that it was fully autonomous. However, this time we only used the Lighthouse positioning system since it was a bit easier to set up (blogpost 1, blogpost 2, video). The computer still had to command which Crazyflie to start flying, but other than that, we didn’t have to mind it that much and had plenty of time to talk with the users.
2020 – 2022: Covid and the Home Lab
As everyone knows—and probably tries to forget—2020 was the year that Covid hit us hard, and we couldn’t travel anywhere anymore. For us, it was quite an adjustment period, as we had to find another type of motivation to keep moving forward and continue development. We introduced the concept of the home lab and gave online talks and tutorials to still show cool stuff with the Crazyflie to the world (blogpost, video).
In 2020, we all joined together to work on the Hyper demo, which was a showcase that demonstrated the Crazyflie could fly with three positioning systems at the same time, enabling it to fly all the way from the meeting room to the flight arena (blogpost, video). We also celebrated Bitcraze’s 10-year anniversary with the BAM Days, a full 3-day online seminar about all things Crazyflie, for which we and our collaborators prepared a whole range of different demos, including a Rust-based app layer example and a peer-to-peer onboard swarming example (blogpost).
2022-now: Back to conferences
At the end of 2022, we managed to go to fairs again, namely IMAV and IROS 2022, where we showcased the fully autonomous swarm demo as before Covid hit. However, due to the demos we conducted during Covid, we also added full onboard peer-to-peer communication. This enabled the Crazyflies to negotiate which Crazyflie could take off, which pretty much completely eliminated the need for an external computer. Moreover, the Crazyflies communicated their positions to each other, which made it possible for them to avoid collisions on the fly (blogpost, video).
We have shown this demo as well for ICRA 2023 in London (blogpost) and ICRA 2024 in Yokohama (blogpost) with different variations and the upcoming brushless version as well (blogpost). The demo is quite robust, but it’s great to learn about the quality of the new motors and props, the guard prototypes of the Crazyflie Brushless, and the flight stability. But as you know us by now, it is time for something different!
Soon – ROSCon 2024
We have been to ROSCon before, back in 2022 (blogpost), but now we will be going to ROSCon 2024 for the first time as exhibitors (blogpost). ROS is a framework that is used by many researchers, including our users through Crazyswarm2, but ROSCon is more developer-oriented, and there will be more companies present that focus more on industry than academia. This time we won’t show our swarm demo as we usually do, but we will be showing demos more in line with what is presented in the ROS skill learning session of the robotics developer day (blogpost, video), but we will be hacking around on the spot! So this will be something new for us to try out, and we are very much looking forward to it!
Developer meeting, 9th of October 2024
This blog post only represents a subset of demos that we have done, but we will go into further detail at the next developer meeting on Wednesday, the 9th of October, at 3 PM CEST! Please join us to learn about all the great demos we have done in the past, get a glimpse of the history of Bitcraze, and discuss why demo-driven development is so important in moving your development forward.
If you know a little about Sweden, you know about Midsommar. Nothing like the 2019 horror film (thankfully), though we do wear flower crowns and dance around the pole. It’s usually an occasion to celebrate with family (and alcohol) those long days and short nights. We actually celebrated a little bit early today with a nice team barbecue.
Midsommar is next Friday, and it marks the official kickoff to summer here in Sweden. That also means that for the coming 2 months, Bitcraze will be operating with a slightly smaller team. So, what does that mean for you? This should not impact you too much, of course, but here are the most important things to note:
Developer Meetings: First up, our regular developer meetings will be on hiatus during July and August. It’s a great time for everyone, including you, our regular attendees, to take a breather. We’ll be back in action come September, resuming our usual schedule of one meeting per month.
GitHub: With fewer team members around, our response time on GitHub discussions might be a bit slower. We strive to answer every question, but with less manpower, some issues might only get resolved when the person with the right expertise returns from their vacation. We appreciate your patience and understanding during this time.
Orders: Shipping and deliveries should have the same pace, so don’t worry about your order coming on time, we’ve got that covered!
Ongoing projects and maintenance
Our focus during the summer will shift primarily to maintenance and continuing work on ongoing projects. We’re putting the final touches on the Brushless project of course, and will keep working on its charger solution too.
We’re excited to announce our participation in Robotics Developers Day on July 5th. We’re not only sponsors of this event, we’re also thrilled that Kimberly will be hosting a live learning session about ROS 2 on the Crazyflie.
For us at Bitcraze, summer is a wonderful opportunity to slow down a bit and focus on projects we don’t usually have time for. This could mean diving deeper into learning RUST, reorganizing the office, or trying some prototypes out. It’s a chance to reset and prepare for the busy months ahead.
We hope you have a fantastic summer filled with sunshine, relaxation, and lots of new adventures. Glad Midsommar, as we say here!
My name is Joseph La Delfa, I started in December last year as an industrial postdoc at Bitcraze. This means I work across Bitcraze HQ in Malmö and the division of Robotics Perception and Learning at KTH in Stockholm. I have been designing and researching interactions that involve bodily control of drones for a few years now.
In order of appearance: Demonstrating at a conference, mucking around with the Qualisys tab, coaching at Drone Arena I, playing judge at Drone Arena II, and finally Drone Chi.
Here at Bitcraze I will be using lighthouse decks on the body to control Crazyflie/s, with the aim to produce a wearable sensor that integrates into the Bitcraze ecosystem. The lighthouse positioning system is showing great potential for this application as it gives relatively clean and high-fidelity positional data. Plus now that more than two base stations can be used, we can potentially track the deck from top down and bottom up.
Three motor-less crazyflies are strapped to my arms and tracked using two lighthouse basestations.
This research is a continuation of my PhD thesis, where I designed drone interactions that respond differently to different people, and advocated for a human-drone relationship that evolves over time. Ultimately I hope to demonstrate new use cases for the Crazyflie and expand the already impressive community of researchers who use Bitcraze products!
How to Train Your Drone was a one-month field study in a shared home, where three housemates taught their drones how to fly.
This industrial postdoc is funded by the Wallenberg AI, Autonomous Systems and Software Program (WASP), and you can find out more about my work at www.cafeciaojoe.com :D
From the beginning of the company, we’ve always loved to join in at conferences. Only at a conference do you get the opportunity to show our products, meet our users or other tech-oriented people, learn about what others are doing, and let’s not forget the chance to discover a new place!
This year, we’ll be present at ICRA Yokohama – it’s in just 3 weeks. We’ll have a booth there (IC085 if you’re looking for us). We’ll be showing our autonomous demo with a twist just like we have shown last time, so please check the event page. This demo is extremely impressive and we’ve been improving on it each time we’ve shown it – beginning in our latest Japan trip and lastly at the last ICRA too. What’s new?
… and perhaps some more prototypes of whatever we managed to bring in our suitcase!
We’re really excited to be showing that and receive feedback, but also in hearing about what our users have been doing. ICRA is always a perfect place to catch up on all the amazing papers and publications featuring our hardware, and we couldn’t be prouder of all the cool stuff we’ve seen so far. We’re so proud, in fact, that we want to be able to show off! So, if you have a paper or a publication featured at ICRA, let us know – you can write us an email at contact@bitcraze.io, leave a comment below this post, or pass by our booth.
In fact, we’re prepared to make a deal. If you have a nice poster featuring our products and don’t know what to do with it once you’ve presented it, pass by our booth! We’re ready to swap them for something extra special. We plan to have a “hall of fame” at the office featuring your awesome work – in fact, it’s an idea we had last ICRA when someone just offered us their posters. Now, we’d like to cover our walls with them!
The corridor leading to the kitchen – we have space to show off the awesomeness!
So, whether you’re a seasoned conference-goer or a first-time attendee, don’t hesitate to wsing by our booth, say hello, and discover our newest demo! We hope to see you there.
Dev meeting
Next developer meeting is going to be on the 8th of May – we traditionally have a dev meeting every first Wednesday of the month, but this time it happens to be on the 1st of May which is a holiday here in Sweden. So already prepare your calendar for the 8th of May at 15.00 CET, and stay tuned for more info on which topic we’ll talk about!
Crazyflies back in stock !
You may have noticed that the Crazyflies have been out of stock for some time now. After some adventures, we are now fully back in stock with most of our bundles and products available in the shop!
Hey folks! I’m Tove, and I’m thrilled to be part of the fantastic team at Bitcraze.
Bitcraze had me at “open source, self-organizing, and drones!”. The way of working, using modern software practices and the fact that the company isn’t a corporate behemoth but still packs a punch in innovation really spoke to me.
I come from the world of radio modules and Internet of Things (IOT), building software and customer applications at u-blox. u-blox is also where I wrote my thesis that wandered into indoor positioning territory, which is another reason why I was immediately drawn to Bitcraze once they entered my radar. I studied computer science with an emphasis on embedded systems at Malmö University.
When I’m not working with tech, you can find me playing board games, reading fantasy novels or working on silversmithing projects. I’m also a big fan of being out in nature, especially sailing, and even used to study environmental science before I switched over to ones and zeros.
I’m excited to learn about the great world of drones and robotics. I mean, who has not dreamt about that at some point in their life?! I’m a very poor drone flyer, but I guess some training in that department will help. I love working with tests and software quality to make sure everyone can feel comfortable and focus on developing new exciting features, while being sure nothing breaks in the process!
Looking forward to getting into the team and making things happen together!
This week it will be a bit of a different blogpost than you are used to read from us. Usually we talk about cool prototypes, explain bits and pieces from the Bitcraze ecosystem or let external parties/researchers show case their awesome work that they’ve done on the Crazyflie. Today’s blogpost will be more about a societal topic that plays a big part within the robotics world: diversity! Bitcraze is helping out with the Diversity Scholarship of this year’s ROSCon, which we’d like to advertise about, but is also complimented by some words about diversity in robotics and how this topic is reflected upon within Bitcraze itself.
Diversity & Robotics
It’s widely acknowledged that the field of robotics lacks diversity. While there have been improvements, significant underrepresented groups remain, including women, individuals in LGBTQIA+ communities, people with disabilities, and those from racial and/or ethnic minorities. There are some interesting communities to look into if you are part of these groups yourself. However, if you know of any other ones that are interesting, of course, let us know.
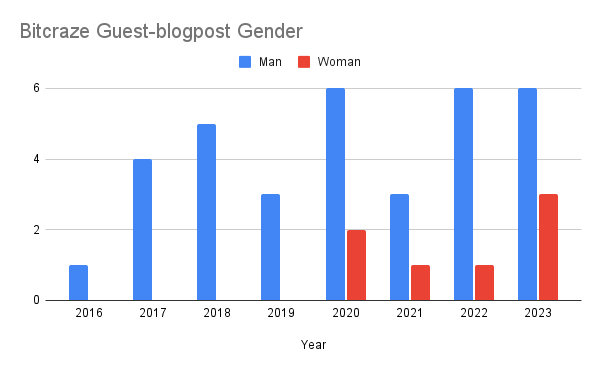
Other than these earlier mentioned groups, we do not regard ourselves as the absolute expert on diversity in robotics, but we have perhaps a simple but interesting statistic to share from our experience. We usually receive requests for guest blog posts on our website from external researchers and engineers looking to showcase their work with the Crazyflie. We thought it would be interesting to graph the gender distribution of these guest bloggers:
Gender of our guest blogposters on bitcraze.io
As you may have noticed, before 2020, all of our guest bloggers were male, and only in recent years has that changed. It’s also worth mentioning that to our knowledge, none of the bloggers has openly identified as anything other than cis-gender male or female. While this shift represents progress, it’s important to acknowledge that there is still room for improvement. Additionally, it is essential to recognize that this tiny statistic does not fully reflect the diversity of the robotics community but rather (perhaps) pertains to a specific subset, such as aerial robotics.
Diversity & Bitcraze
So let me just cut to the chase, Bitcraze is a very small company with currently only 6 full-time employees. Currently, we don’t have any formal policies on hiring and promoting diversity. However, we do have a very open culture within the company where we can discuss these topics at our coffee breaks without restrictions or judgment. There is a genuine interest in sharing and discussing negative experiences related to the lack of diversity at previous workplaces, so we do talk about it a lot.
In terms of our impact internally and externally, for now, we don’t come across enough hiring opportunities to implement diversity policies. We can perhaps also invite more diverse guest bloggers to contribute to our website, or make our developer meetings more welcoming. However, there is only a limited influence that we can exert here with our small company. Therefore, the choice to support other communities we love to improve diversity is perhaps the most we can do to contribute to this cause.
We are already involved in the ROS community by helping out with the ROS aerial community working group (blogpost1, blogpost2) and we loved the atmosphere during ROSCon when we were in Kyoto. When the opportunity arrived to be a co-chair of the diversity committee of ROSCon 2024, together with Belén Torres from Wymaq, we gladly took it and are hoping that is were we can make more of a difference.
Diversity Scholarship at ROSCon 2024
This year’s ROSCon will be held in Odense, Denmark, between October 21st and 23rd. Since 2016, the ROSCon organization has launched a diversity scholarship opportunity, and this year’s event is expected to be the biggest one yet. Individuals belonging to the underrepresented groups in robotics, as mentioned earlier, are invited to apply for the scholarship. The deadline is April 5th, so please don’t wait too long to apply. Check here for the ROS discourse post and here for the diversity scholarship application on the ROSCon website.
I’m Rik, and today marks my return to Bitcraze. Some of you might remember me from a couple of years back when I spent a few months here as an intern. Perhaps you’ve even stumbled upon my guest blog post discussing the paper that concluded my master’s degree. I’m thrilled to be back in the fold!
It’s exciting to be back in Sweden. I love to cook, and although traditional Swedish and Dutch cuisine share quite some similarities (a lot of potatoes and gravy), it’s nice to try out new ingredients and foods. Additionally, being close to the great outdoors is a major draw for me. I already went on my first hike and I heard there are some nice bouldering areas not so far from Malmö.
One of the things that initially attracted me to Bitcraze are its close ties with the research community. In fact, it was through my own research as a master’s student that I first encountered the company. I’m eager to deepen these connections further and collaborate with researchers across various disciplines. Combining this with a team of talented colleagues and a vibrant enthusiast community makes it a great opportunity to learn!
I’m particularly drawn to Bitcraze’s unique organizational ethos. The emphasis on self-organization and collective success resonates with me. The idea of continuously shaping our workplace to reflect our values truly excites me.
Since September, it seems that things at Bitcraze are progressing at an incredible speed. A lot of stuff is happening, and this blog post will try to talk about why we feel excited about the changes coming up… With some teasers!
Changes in the office
One of the reason we picked the office we’re at now is the big flight space, commonly known as the arena. It’s a pretty huge area (around 100m2), separated from the office space, with a high ceiling. It’s perfect for flying. But when we moved here in 2019 we always dreamed about the space that our next-door had, which could be a perfect extension of the flight lab. And, after years of daydreaming, our wish actually came true! So our flight lab is now in the process of getting significantly bigger. I’ll tease you with some before/during photos, to show what the status is right now, but we expect to have a majestic area to fly in quite soon.
Behind the curtain
If you have ideas on how to name it, a name that feels a little more majestic than “arena”, you’re welcome to share it in the comments!
Changes in the products
We have a list of products that we’re working on that we’re really excited about. You know already some of those if you have read our blog posts, and they are a big part of what we’re spending time with, but they’re not the only ones ! Here is a list of the projects we can reveal:
The brushless is in the pipes! We’re getting help to make it as sturdy as possible.
We’re working on an “upgraded” Crazyflie offer, with the longer battery pins and the 47-17 propellers.
There’s a new software release that should come out soon.
Most of our development work the past couple of months have been dedicated to a new deck for flying with more than 4 lighthouse base stations…
And of course, there are always prototypes laying around that look promising!
Of course, that’s just a hint of what lies ahead, and for right now, we can’t really say more until we’re sure everything is on the right tracks.
Other exciting stuff
I know I said this time and time again, but we’re actively looking for new Bitcrazers to add to the team. We hope that some changes will come soon and of course, we will share if we have some big news!
We’ve also partnered with Droneblocks to provide a drone education program for students in the US. The Crazyflie has been integrated into their STEM classroom bundle, complete with a coding curriculum and a dedicated software to introduce young minds to the world of drones. It’s a privilege for us to contribute the Crazyflie to this significant educational endeavor!
We plan to have everything coming together for an epic Christmas video with some new hardware, in our new flight lab… Of course, nothing is certain, but one thing is sure: it’s an adventure being at Bitcraze right now!