If anybody noticed a delay of my response on emails, forum or Github, that might be due to the fact that I was on the road for Bitcraze for the last few weeks! I was invited to give a guest lecture for a course at EPFL, and of recent they have a CO2 reducing policy regarding travel. At Bitcraze we also aim for reducing our environmental impact, so hence the idea came forth to travel to Switzerland and visit our close collaborators that are nearby(ish)… all by train! Internally we dubbed this to be The Grand Tour.
The Itinerary
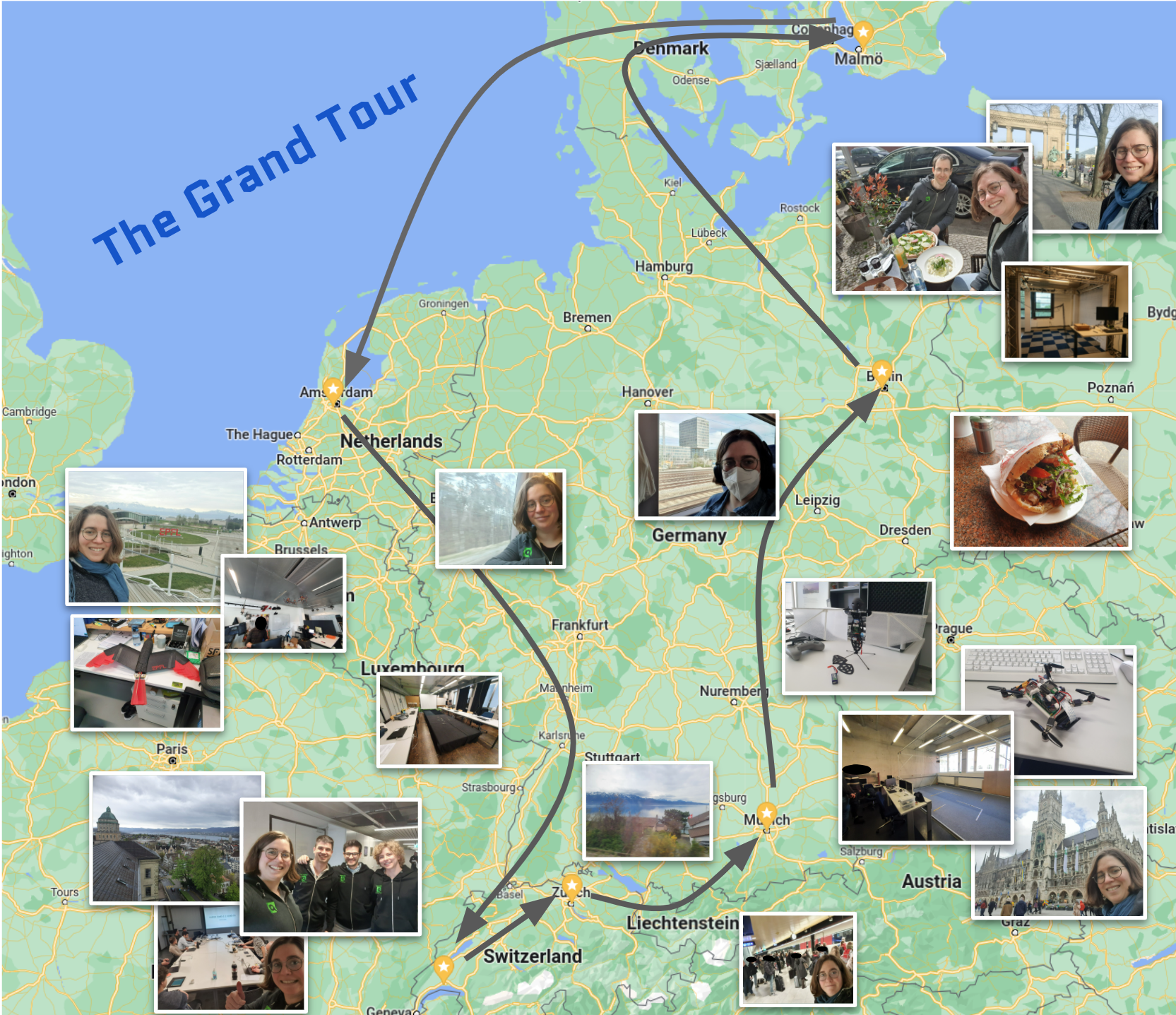
We kept the itinerary mostly within Switzerland and Germany, although I did pass the Netherlands a few days just to visit family. The full itinerary by train was:
Utrecht (NL) -> Lausanne (SW) -> Zürich (SW) -> Munich (GE) -> Berlin (GE) -> Malmö (SE)
The longest train ride was from Utrecht to Lausanne (9 hours), but all the others were well under 4 hours which was pretty comfortable. The nice thing about being in the train is that it quite easy to work on your laptop (although the wireless network + onboard WiFi was still patchy). Luckily I was able to actually phone in for Bitcraze’s morning meetings so that I wouldn’t miss a thing.
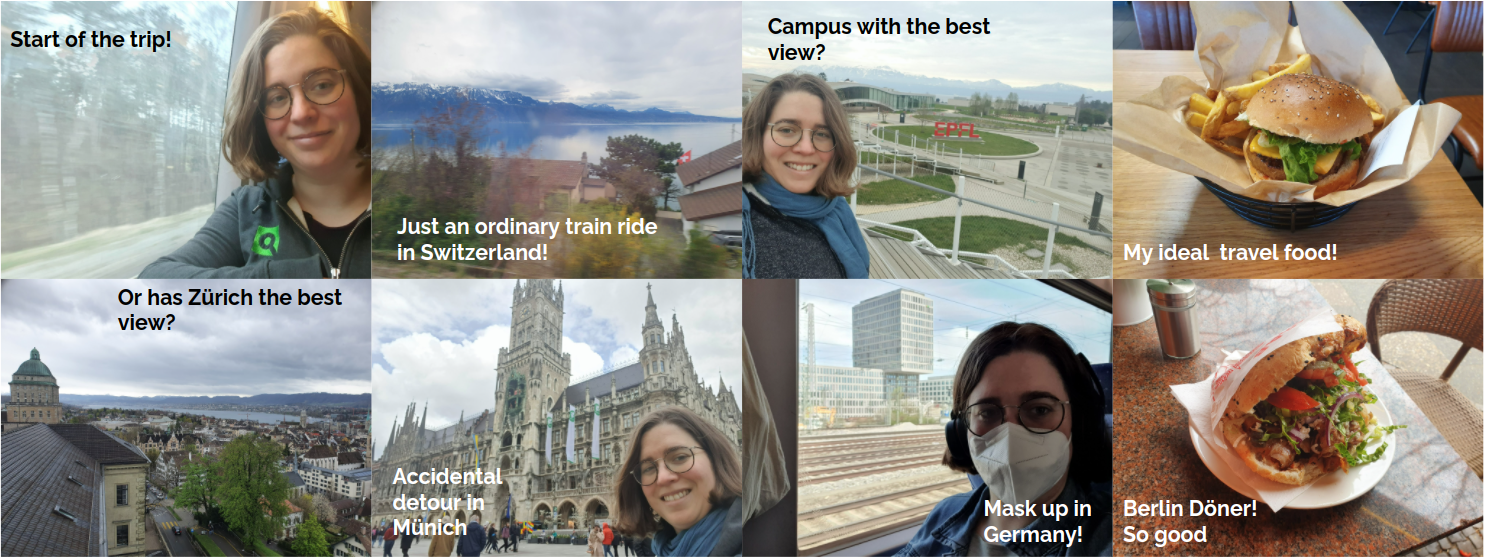
Here are some pictures of the in-between travels, with the views, trains and food. It was all awesome, but if I do have to make a confession… the train rides through Switzerland was the most beautiful of all!
The People
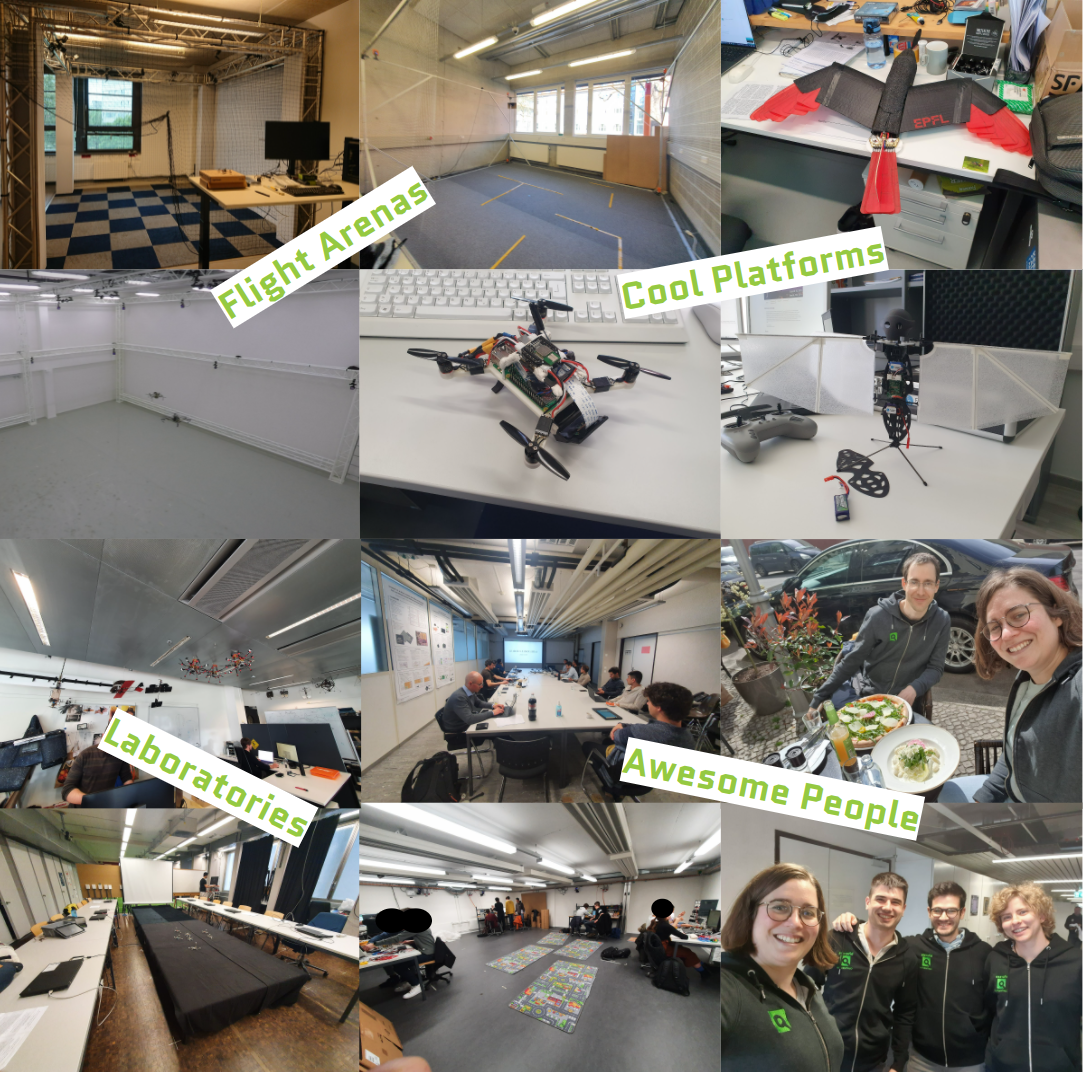
The first two days in Lausanne went quite smoothly. Dario Floreano of the Laboratory of Intelligent Systems (LIS) invited us to give a Crazyflie 101 lecture to the students of the Aerial Robotics course, for which we are very grateful for the opportunity. It was great to do the talk in person this time and visit the EPFL campus, since the last two years I’ve given the same lecture from my own kitchen. I was able to see the students trying to start up the course themselves, and actually got to experience how they would install the Crazyflie framework. Next to my lecture, I was given a very nice tour through the offices, laboratories and work-spaces, where I had the possibility see all the nature inspired drone designs of the LIS-lab. In the meantime I also squeezed in a quick but fun visit with Cyberbotics, the creator of Webots, to discuss our latest efforts for a crazyflie simulator.
After a beautiful train ride towards Zurich, I first met up with the people of the Automatic Control lab (ACL), who made a video about how they handled education with the Crazyflie during the harsher COVID times. Now I got a chance to see the flight room where students are able control their Crazyflie down to the rate attitude controller. Moreover, I was treated to a full workshop, hosted by ETH Zürich’s Integrated Systems Lab (IIS) and Center of Project Based learning (PBL), joined by researchers from ETHZ, University of Bologna and IDSIA (Lugano) working on the PULP platform and/or nano-drones. The workshop consisted of them and us showcasing our current work, future plans and they showed me very impressive demos with both the AIdeck and their own prototypes decks! Complete that with a lunch with one of the best views any campus has to offer, coffee break talks, and you have a very inspiring day.
The third part of the trip took place in Germany! My first stop was near Munich, namely Hochschule Augsburg, where I visited the Cooperative Control Lab lead by Klaus Kefferpütz where we had great discussions about collaborative swarms and state estimators. They showed their lab with demos, and we spoke about positioning systems and how to improve their development experience. They are currently integrating the Bolt with a Raspberry Pi with the latest functionalities we implemented into our firmware, which we can imagine is a very wanted feature by the community! I also had a brief visit at TU Munich as well to visit my friend Sophie Armanini from the eAviation and Sustainable Flight Group, and to my surprise I got to fly with a Crazyflie Bolt fueled Flapper drone!
As my final stop, I visited Wolfgang Hönig from the Intelligent Multi-Robot Coordination Lab (IMRC) at TU Berlin. Here we discussed all about Crazyswarm, simulations and firmware python bindings among many things. Also, we had a successful hackathon where we managed to generate python bindings of the Mellinger & PID controller and the motor mixing. On top of that, we managed to fly with the PID binding in the Webots simulator, which has been on the wish list for a little while now. It was great working together again in person after 1.5 years!
The Insights
It was great to see all the different ways that our products are used and what matters to the community members were dealing with. I’ve visited labs that tweak the attitude rate controllers, trying to improve the quality of the state estimators, or experiment with the actual mechanics. However, it was clear to see that quite some were controlling the Crazyflies on a higher level of autonomy, either off-board or onboard. This is all spread out over education and research alike, so there is a very wide range of people that are working with the Crazyflie.
There is of course also a huge variety in their approach. Some used our internally development framework with the Cflib and cfclient, and I’ve generated quite some new Github tickets in those respective repositories based on the discussions I had. However, it was interesting to see that many have made their own clients to tailor more to their research and education objectives. Moreover, about half of the users I met used ROS to interact with the Crazyflies. Is it perhaps a sign that we should start to rethink the communication infrastructure and how it all fits together?
There was also quite the difference on how close these users were on our latest changes. It ranged from working on a branch forked 4 years ago to being on the very edge of the commits, which each have their pros and cons. Working on a stable branch that has been proven worthy might be beneficial with education classes, but also makes people miss out on new features like the new lighthouse integration. However, it is not all fine and dandy on the edge of development either, as I have heard of many having issues with the new kbuild intergration, installing the cfclient or our latest efforts of getting the AIdeck out of early access. That is something that these pioneers has to deal every time they merge the new master, so we need to find better ways to make it easier for them as well.
And last but not least, it seems that the simulation we have been working on has generated quite the buzz, as most of whom I spoke to were quite interested in it, or has used a different simulation for their purpose. It was clear that there is not yet a standard simulator for aerial robotics that can fulfill everybody’s requirements in terms of swarming, (vision-based) autonomy or control. Perhaps that is a good reason to promote the simulation work from Fun-Fridays to a regular day project and have some interesting future discussions with the community how to shape this to most of our needs.
The Conclusion
All and all, those were very inspiring 2 weeks of travel for me. Even though physically I was a bit exhausted afterwards, mentally it was very motivating and inspiring! After two of the worst years of the pandemic it was great to talk to people in person and I really feel stronger connections with those I visited than the remote video calls we have done before. It is so important to stay in touch with the community in person, after so long time of absence, as we get a better sense of what the needs are and how people are using the Crazyflie and its ecosystem. The Grand Tour was according to us a great success, and who knows…. perhaps we will do an 2023 edition as well :)