It’s not often a blog post happens on the 25th of December, so this time, you’re having a treat with some new Bitcraze prototypes as a present from us! If you have time to get away from the Christmas table, there’s something we’d love you to watch:
Now let’s try to see if you noticed all the new stuff you see in this video!
Our new flight lab
We teased it, but in the beginning of December, we got our extended flight lab! We added 110 m2 to our flight space. It was a rush to have everything ready for the video – we cleaned everything, painted the walls and the green logo, set up the positioning system without our truss… But now we’re happy to show you how big the space is! Even if it’s hard to convey the real size on camera.
The Crazyflie 2.1 brushless
We already talked about it in this blog post, but the brushless has made significant progress and we feel confident that you will get your hands on it in 2024. Here, we use the extra power for a fast and agile flight. It also was very stable and didn’t crash once during the shooting!
The Lighthouse V2
Yes, you counted right! The Brushless flew with 16 base stations! We’ve worked really hard this past three months to create a new Lighthouse deck – the Lighthouse deck 2.0. It could get its position from 16 base stations. That’s 4 times more than what was previously possible! It behaved consistently well during the different tries, and we are really happy with the result. Right now, it’s just a prototype, but we’re hoping to get it to the next step in the coming months.
The contact charging station
Marcus created a power charger for the Brushless that doesn’t need any extra deck to allow for charging. It connects with the brushless feet. It has also the cool feature of changing LEDs indicating the status (idle, charging or charged). It is also a prototype, and we don’t know if this will end up being a product
The high-power LED
This is trickier to see, but it’s not our usual LED ring that the brushless carries. It’s a new, powerful LED underneath. It is so powerful that it nearly blinded us when we tried it for the first time. We put a diffuser on it, and it allowed the Crazyflie to be visible at such a high pace! This is a prototype too of course and we’re not sure if we will release it, but it’s fun to use for this kind of project.
Other announcements
During this week, our office is closed- we take this week to celebrate and rest a little before 2024. This means that shipping and support will be greatly reduced.
But we’re back the week after- at a somewhat reduced pace though. The developer meeting on the 3rd of January is maintained but without any presentation. We’ll take this time to answer any questions you have and talk a little! The details are here.
Bitcraze got their presents this year: a handful of working prototypes! We hope we got your wishes too, merry Christmas to you!
When the Crazyflie was created the intended use case was manual flight with one drone. Over the years we have added support for positioning, swarms, autonomous flight and all sorts of nice features, and it has all been built on top of the original code base. Some of the original code is actually untouched after 7-8 years and needless to say, there is a slight worry that we might have taken design decisions back then that will come back and bite us in new use cases. This blog post will outline some of the work we have been doing to handle this problem by setting up an autonomous system where a Crazyflie is continuously flying – the infinite flight project.
The original design essentially assumed one Crazyflie that is controlled by one computer with one Crazyradio. On the computer the user was running the python client and controlling the flight manually with a game pad. The user might have restarted the Crazyflie before each flight, or at least when changing battery.
Now fast forward to the current situation where a swarm of Crazyflies might be controlled by multiple radios, each connecting to multiple Crazyflies. The Crayflies are flying autonomously, perhaps getting their current position from the Lighthouse system, or via radio based on information from a mocap system. Maybe telemetry data is sent back to the ground while commands for trajectories to the Crazyflies go in the other direction. In some systems the Crazyflies use wireless charging to be able to run continuously.
Obviously the current situation is very different from the original design with new or changed requirements. One is the extended use of the radio, and this is something that we have been talking about in some previous blog posts and we will not discuss that here. This blog post will instead be about one other important topic: long term stability.
In the original design, the Crazyflie was restarted often, maybe before each flight. This means that the code did not run for a very long time, so what happens if we use wireless charging and keep the firmware running for days? Will there be a problem? We decided to find out by starting an internal project we called “Infinite flight”. The idea was to set up a system with a Crazyflie with a Qi-charger for wireless charging and a Lighthouse deck for positioning. An app in the Crazyflie takes off, flies a trajectory and lands for recharging when the battery is out, the cycle is then repeated for as many times as possible. By doing this, we hoped to find any software problems in the firmware that might show up after some time, finding hardware that is worn out over time or other finding other issues. Spoiler alert: we have not reached infinity yet, but we have got a bit closer :-)
The setup is fairly straight forward, the firmware is based on the app used in the demo we used at IROS and ICRA, with some modifications. We have a ground station computer that collects data, it tries to continuously maintain a connection and re-establish it if it is lost. We log as much as possible to be able to analyse problems and understand what happened. We also added some tools to make it easier to visualize and dig in all the log data. The usual work flow has been to
Start the Crazyflie and run the app
Wait for something to go wrong (sometimes days)
Analyze what happened and figure out if something needs to be changed
Update and start over again
A surprising number of runs failed fairly quickly, only after a few flights. The reason has usually been some sort of handling error or problems with the test software, but some have been of more general interest or bugs.
Stopped logging
We had a problem where the logs from the Crazyflie in the ground computer stopped without any apparent reason. It turned out to be related to the session-less nature of the CRTP protocol, there is no good way to determine if a session is alive or not, other than using a timeout. It turned out that there is a timeout in the Crazyflie firmware (that was not fresh in our memories) that stops logging if no packets are received for a while. The rationale is to avoid having old logs running if a client is disconnected. In our case we lost communication for a short period of time and the firmware simply stopped the logging. The python lib on the other hand had a longer timeout and did not have the view that the connection was lost. The solution we used is to set up the logs again if we don’t receive logging for a while (we fixed an issue in the python lib related to this)
In the future com stack we plan to have proper session handling which should remove this problem.
Controller tuning
We have been using various flavors of Crazyflies in the tests, including some prototypes. We had some issues with one prototype that we did not understand, it had a hard time hitting the landing pad when landing. It turned out that the STM that was used in the prototype was reused from an old Crazyflie and it had some weird PID controller settings stored as persistent parameters. With the persistent parameters cleared, it worked as expected.
We have played a bit with tuning the controller, but the default settings are fairly OK and we used them most of the time.
Some of the prototypes we used had some glitches or irregularities, it is very hard to hand solder PCBs. These problems are only related to a specific hardware individual and can cause some unexpected behavior which takes time to figure out.
Landing pad edge
The landing/charging pad we use (also used in our demos) generally works fine, it has a “slope” towards the center which helps the Crazyflie slide to the correct position. If the Crazyflie miss the landing too much though, it will end up on the edge with one leg on the ground and an angle away from the center. In this case it sometimes fails to take off properly and crash. We solved this by adding a foam pad around the landing pad to “raise” the surrounding floor the the same level as the landing pad and thus reduce angle.
Lighthouse bug
There is a known bug in the lighthouse deck that prevents it from receiving data at certain angles. We had some cases where our landing pad was located in a spot where we lost tracking of both the active base stations for some yaw angles. If the Crazyflie happened to land in that exact yaw angle, it lost the position while charging and it did not know its current position when it should take off again. This was solved by moving the landing pad to a different position.
Not yet investigated possible problems
One possible known problem is the system tick counter in FreeRTOS. The counter is a 32-bit unsigned word and it is increased every millisecond. The counter is used in the firmware as the internal “clock” to determine for instance how long ago the estimator was updated or to determine when to execute some piece of code the next time. This counter will wrap after 2^32 ms, that is around 7 weeks, and we don’t really know what will happen.
Results and conclusions
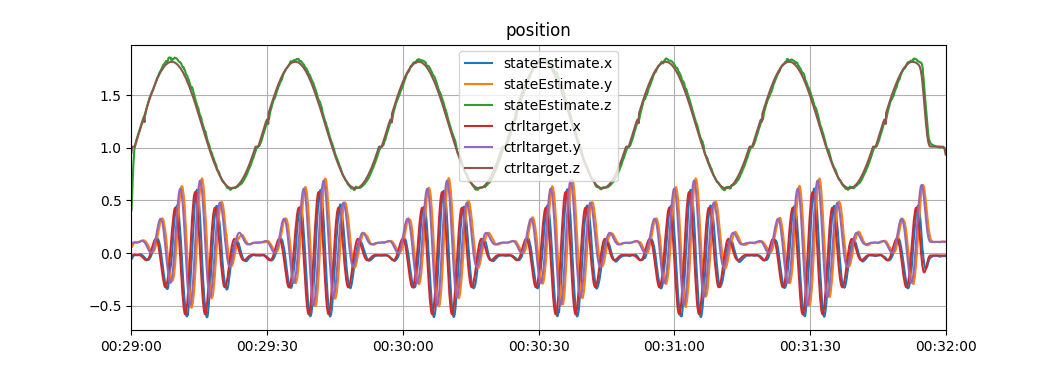
The longest we managed to keep the system running was 5 days. We had a slow charging cycle and only flew 57 times. In this session, the flight time was very stable between 5:30 and 5:45 for all flights. This test was done with a standard Crazyflie 2.1 with a motor upgrade kit.
The second longest session was 3 days, in this case we used a brushless prototype and pushed the charging very hard. We ended up doing 276 flights but the battery was pushed beyond specs and being too warm and charged too fast, it degraded over time and the flight time was reduced to only 2-3 minutes at the end.
We believe we have fixed most of the long term stability issues, but it is hard to know. There might be bugs lurking in the firmware that only show up under very special conditions. What we do know is that it is possible to fly for 5 days!
Today, Lennart Bult from Emergent Swarns presents us with this project of a 24/7 swarming demo. Enjoy!
Over the last few months our team has been working on creating a 24/7 swarming demo. Initially tasked by Guido de Croon and Chris Verhoeven from TU Delft MAVLab and the TU Delft Robotics Institute, we set out to find our way within the Crazyflie ecosystem to gradually increase the size and capabilities of the swarm. In this article we will first talk about some of the work and methods that we used. After that, we will introduce the TU Delft Science Centre Swarming Lab and talk about some applications of swarming drones.
Developing the 24/7 swarm
The project started in February with the goal of creating a physical swarm capable of real-time collision avoidance with drones and static obstacles. We started out with three drones equipped with the Flow Deck, and by setting them up in a clever way we could perform the first collision avoidance and landing tests. We were impressed with the performance we got out of the Flow Deck, however, eventually, it is mostly a battle against the drift of the position estimate, that is, we could increase some of the margins on the collision avoidance only so far before we would either fly out of the test zone or collide with another drone. Luckily with short test flights, we were able to see some of the flaws in our algorithms and correct them before testing with the new setup.
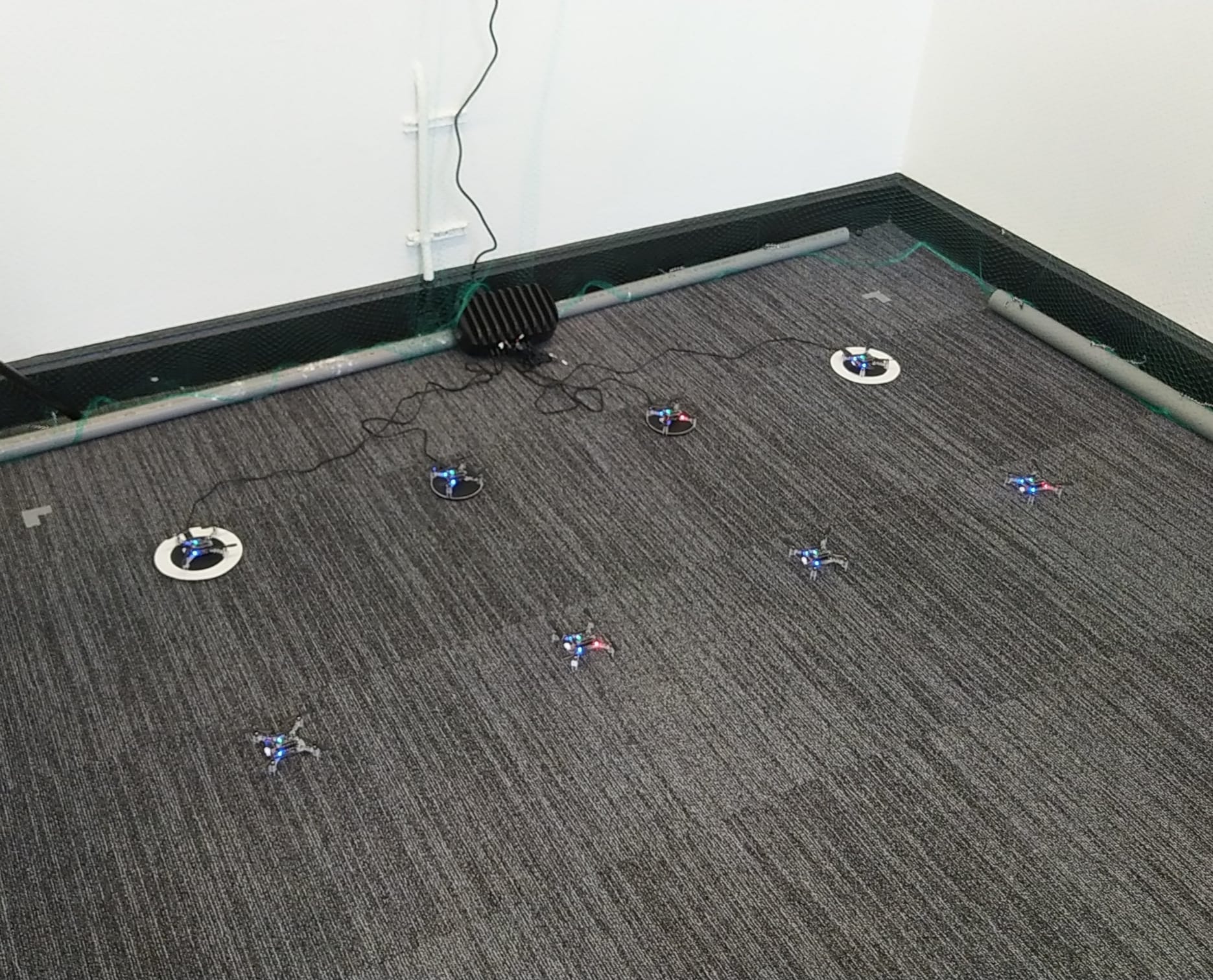
Setup after the first expansion to eight drones.
After a few weeks of testing we got approved for the first swarm expansion, five more drones and a Lighthouse positioning setup. This is when we could do our first real tests with the collision avoidance algorithm, which, much to our own surprise, worked on the first try. This is also when we first posted a project update on LinkedIn. There were however a lot of bugs that still needed to be worked out, and a lot of system experience still to be gained. After flying for a bit longer we noticed that some of the drones would flip quite often, which is when we discovered that we needed the thrust upgrade to control the additional weight of the larger battery and charging deck.
For the charging setup we took inspiration from the Bitcraze IROS 2022 demo; we 3D printed sloped landing pads that we tape onto a wireless charger. After a few iterations we landed on a design that uses minimal printer resources and allows the Crazyflie to land a bit off-center. This last feature turned out to be quite useful considering the large amount of destabilizing airflow that is generated by 40 drones. After receiving the last order of drones we also expanded the charging setup, which at this point takes up quite a bit of floor space. There are some ideas to create a vertical landing pad stack, which would bring the additional challenge of missing the landing pad not being an option.
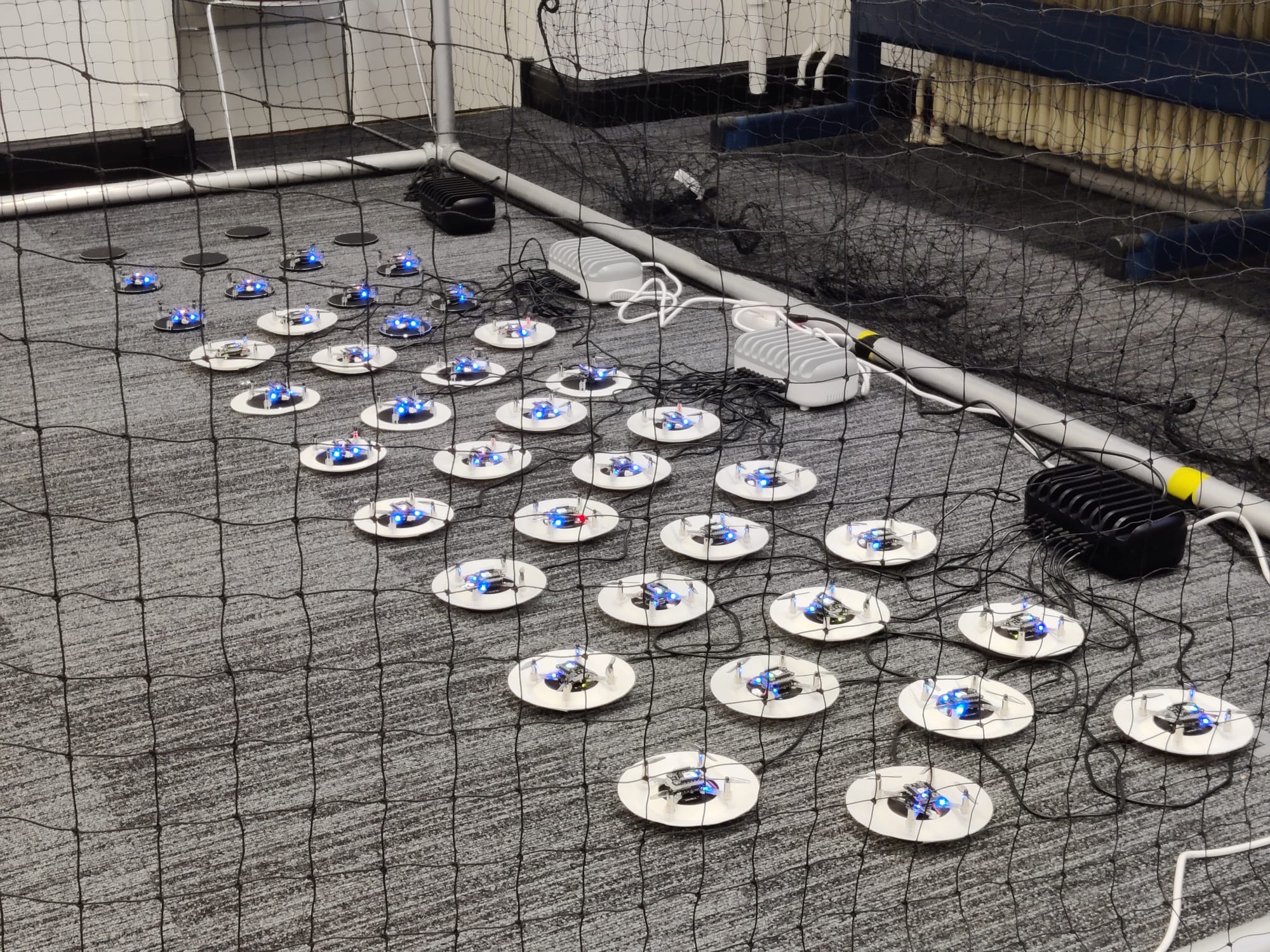
All 40 drones recharging before their next flight.
After prototyping the charging setup and building confidence with the initial setup, we were confident enough in our system capabilities to expand it to the point where a continuous demo of 5-8 drones is possible. Although the system integration of the previous expansion went without much trouble, we did encounter a few issues when expanding to 40 drones. The first issue of which was radio communication, we noticed that a delay in the radio communication would be present if we increased the update rate above a certain level for a specific number of drones per radio. The second issue we encountered were performance drops related to the violation of certain bounds in the collision avoidance algorithm. These two issues were very difficult to debug since it was not immediately obvious where the source of the issue was.
The third and last major issue was the increase in destabilizing airflow of 40 drones compared to 8. With 40 drones there is a noticeable breeze when you stand next to the drone cage, which is nice for summertime, but not so nice when drones need to land in a tight-packed configuration. To combat this issue there is a limit to the amount of drones that can land at the same time. There is also a minimum separation distance between two active landing pads, which reduced the severity of the induced turbulence. There are still ongoing efforts to increase the landing success rate, which is currently affected by drones running out of power during the landing procedure.
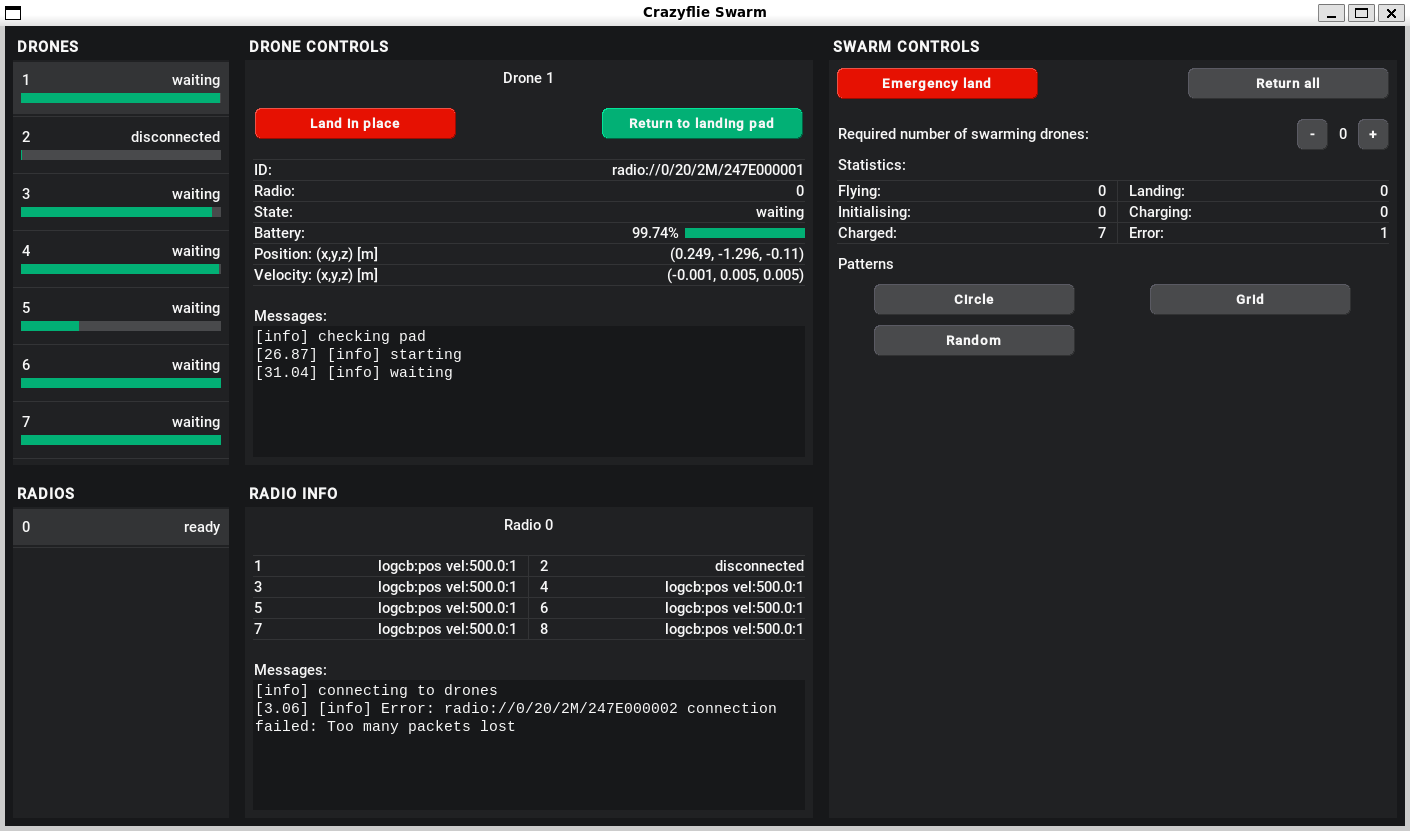
To control and monitor the swarm we designed a custom GUI, an impression of which you can see below. Although some of the buttons are still a work in progress, there are a lot of features that have already proven very useful, especially when testing a new feature.
V1 of the graphical user interface developed for the 24/7 swarm.
The code base that we created for the swarm will be largely open-sourced (only the collision avoidance will not be open-source) to provide researchers all around the world with the possibility to setup their own Crazyflie swarm for research. You can find the repository through this link. Note that the documentation and code base are still under development and might contain bugs/errors.
Human interaction
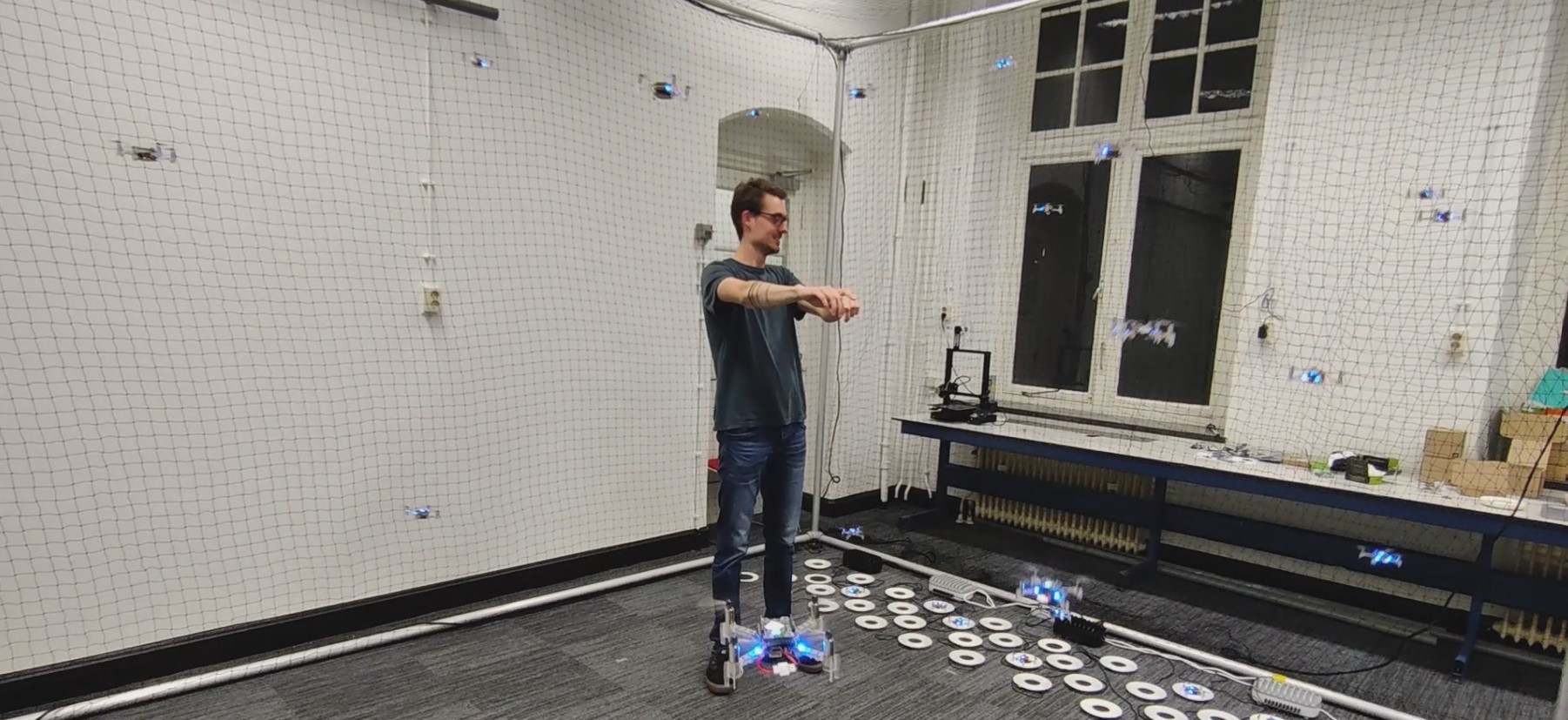
After creating all functionality to provide a continuously operating swarm demo, it was time to work on some of our stretch goals: 1. walking through the swarm whilst it is operating and 2. controlling the swarm using our arms. In the image below you can see an impression of precisely this functionality. The drones are following the operator’s gesture commands whilst performing live collision avoidance with an operator.
Team member Seppe directing the 40 drone swarm, see the full video here.
This demo requires multiple techniques and hardware elements working together to create a relatively low-latency, human-controlled swarm. We used a Kinect-like 3D sensor to perform human pose estimation, we subsequently used this data to create a dynamic obstacle in our collision avoidance software. An important element to consider here is the synchronization of the Lighthouse- and 3D sensor coordinate frames, i.e. without proper calibration the human will not be correctly positioned with respect to the drones and the drones will crash into the human. The interaction between the swarm control software and the human gesture commands also requires careful consideration, proper tuning is required to ensure a responsive system that is reliable and not too aggressive.
TUD Science Centre Swarming Lab
The next step in this project will be to set up the swarm at its new location, the TU Delft Science Centre. Here, the swarm will first and foremost be visible as a public demo, showcasing the capabilities of TU Delft state-of-the-art swarming research. There will also be a focus on developing the swarm as a research platform. This will allow TU Delft students and researchers to extend swarm functionalities and test their theory on a physical swarming system. Besides demos and academic research, there will also be worked on developing educational applications across the full educational board (primary school, high school and applied education). If you are interested in working on, or collaborating with the swarming lab on any of the above-mentioned tasks, feel free to email the lab management at operations.swarminglab@tudelft.nl.
The TU Delft Swarming Lab setup with 40 drones and charging pads for continuous operations and research.
Applications of Swarming
There are a lot of potential use-cases for fully autonomous drone swarms, ranging from indoor applications such as warehouse monitoring and factory inspection to outdoor applications such as search and rescue and surveillance. In our opinion, the true potential of drone swarms lies in applications where there is a significant need for a scalable system with a lot of built-in redundancy. A lot of additional use cases open up when we consider fully onboard autonomous systems, where the full benefits of decentralized swarming can be utilized. Currently, the size of drones needed to achieve such feats is quite large, though maybe in a few years, we could see more and more being done on drone platforms such as the Crazyflie.
A swarm inspection of an F-16 Fighting Falcon at Deltion College in Zwolle, the Netherlands.
An interesting area of application for drone swarms could be in the inspection of aircraft. Drone swarms provide a scalable and flexible means to perform a fast inspection of aircraft across an entire airfield or military base. To showcase that this can be done with any size of drone, we went to Deltion College in Zwolle to perform a mock inspection of an F-16 fighter jet. Above you can see an impression of the inspection. Another area of application is search and rescue, where there is a need for systems that can find people or objects of interest in unknown and cluttered environments. Furthermore, the area that needs to be searched is usually very large and sometimes difficult to travel on foot. A drone swarm could provide fast and reliable coverage of the area of interest, whilst providing full data traceability. Seppe and Lennart will work on creating drone swarms for these use cases with the start-up Emergent Swarms.
As mentioned in a previous blog post, we have a both at ICRA in London this week. If you are there too, come and visit us in booth H10 and tell us what you are working on!
Barbara and Arnaud is getting the booth ready
We are showing our live autonomous demo and our products in the booth, including the flapping drone Flapper Nimble, don’t miss it!
The autonomous demo
The decentralized autonomous demo that we are showing is based on technologies in the Crazyflie ecosystem. The general outline is that Crazyflies are autonomously flying in randomized patterns without colliding. The main features are:
Positioning using the Lighthouse positioning system, all positioning estimation is done in the drone. The Lighthouse positioning system provides high accuracy and ease of use.
Communication is all peer-to-peer, no centralized functionality. Each Crazyflie is transmitting information about its state and position to the other peers, to enable them to act properly.
Collision avoidance using the on-board system without central planing. Based on the position of the other peers, each Crazyflie avoids collisions by modifying its current trajectory.
Wireless charging using the Qi-deck. When running out of battery, the Crazyflies go back to their charging pads for an automatic re-fill.
The App framework is used to implement the demo. The app framework provides an easy way of writing and maintaining user code that runs in the Crazyflie.
We are happy to answer any questions on how the technology works and implementation details. You can also read more about the demo in the original blog post by Marios.
Developer meeting
The next developer meeting is next week, Wed June 7 15:00 CEST and the topic will be the demo and how it is implemented. If you want to know about any specific technologies we used, how it is implemented or if you are just curious about the demo in general, please join the developer meeting. We will start with a presentation of the different parts of the demo, and after that a Q&A. As always we will end up with a section where you can ask any question you like related to our ecosystem. Checkout this announcement on our discussion platform for information on how to join.
This week’s guest blogpost is from Matěj Karásek from Flapper Drones, about flying the Nimble + with a positioning system. Enjoy!
Flapper Drones are bioinspired robots flying by flapping their wings, similar to insects and hummingbirds. If you haven’t heard of Flappers yet, you can read more about their origins at TU Delft and about how they function in an earlier post and on our company website.
In this blogpost, I will write about how to fly the Flappers (namely the Flapper Nimble+) autonomously within a positioning system such as the Lighthouse, and will of course include some nice videos as well.
The Flapper Nimble+ is the first hover-capable flapping-wing drone on the market. It is a development platform powered by the Crazyflie Bolt and so it can enjoy most of the perks of the Crazyflie ecosystem, including the positioning systems as well as other sensors (check this overview). If you would like to get a Flapper yourself, just head to the Bitcraze webstore, where there are some units ready to be shipped! (At the time of writing at least…)
Minimal setup
The minimal setup for flying in a positioning system is nearly identical as with a standard Crazyflie. Next to a Flapper with a recent firmware, a Crazyradio dongle, a positioning system (in this post we will use the Lighthouse), and a compatible positioning deck (Lighthouse deck) you will also need: 1) a mount, such that the deck can be attached on top of the Flapper, and 2) a set of extension cables. You can 3D print the mounts yourself (models here), the extension cable prototypes can either be inquired from Flapper Drones, or can be soldered by yourself (in that case, the battery holder deck, standard Crazyflie pin headers and some wires come handy). Just pay attention to connect the cables in the correct way, as if the deck was mounted right on top of the Bolt. The complete setup with the Lighthouse deck will look like this:
Lighthouse deck installation on a Flapper Nimble+. Make sure the extension cables are well secured (e.g. by using the additional cable mount) such they don’t get caught by the gears.
For the Lighthouse, as with regular Crazyflies, the minimum number of base stations (with some redundancy) is 2, but you will get larger tracking volume with more base stations. 4 base stations mounted at 3 m height will give you about 5 meters time 5 meters coverage, which is recommended especially if you want to fly more than 1 Flapper at a time (they are a bit larger than the Crazyflies, after all…). From now on, it is exactly the same as with standard Crazyflies. After you calibrate the Lighthouse system using the standard wizard procedure via the Cfclient, you can just go to the Flight Control Tab and use the “Command Based Flight Control” buttons to take-off, command steps in xyz directions and land. It is this easy!
Flapper Nimble+ in Lighthouse flown via Command Based Flight Control of cfclient
Assisted flight demo
We used this setup in February for the demos we were giving at the Highlight Delft festival in the Netherlands. This allowed people with no drone piloting skills (from 3-year-olds, to grandmas – true story) fly and control the Flapper in a safe way (safe for the Flapper, as the Flapper itself is a very safe platform thanks to its soft wings and low weight). To make it more fun, and even safer for the Flapper, we used a gamepad instead of on screen buttons, and we modified the cfclient slightly such that the flight space can be geofenced to stay within the tracking volume.
Flight demo at Highlight Delft festival, using the Lighthouse and position hold assistance
If you would like to try it yourself (it works also with standard crazyflies), the source code is here (just keep in mind it is experimental and has some known bugs…). To fly in the position-assisted mode, you need to press (and keep pressing) the Alt 1 button, and use the joysticks to move around (velocity commands, headless mode). Releasing the Alt 1 button will make the Flapper autoland. Autoland will also get triggered when the battery is low. You can still fly the Flapper in a direct way when pressing Alt 2 instead.
Flying more Flappers at a time
Again, this is something that works pretty much out of the box. As with a regular crazyflie, you just need to assign a unique address to each of the Flappers and then use e.g. this example python script to run a preprogrammed sequence.
With a few extra lines of code, we pulled this quick demo at the end of the Highlight Delft festival, when we had 30 minutes left before packing everything (one of the Flappers decided to drop its landing gear, probably too tired after 3 evenings of almost continuous flying…):
Sequence with 3 Flappers within Lighthouse positioning system
Other positioning systems
Using other positioning systems is equally easy. In fact, for the Loco Positioning system, the deck can even be installed directly on the Flapper’s Bolt board (no extension cables or mounts are needed). As for optical motion tracking, we do not have experience with Qualisys and the active marker deck, but flying with retro-reflective markers within OptiTrack system can be setup easily with just a few hacks.
When choosing and setting up the positioning system, just keep in mind that due to its wings, the Flapper needs to tilt much more to fly forward or sideways, compared to a quadcopter. This is not an issue with the Loco Positioning system (but there can be challenges with position estimation, as described further), but it can be a limitation for systems requiring direct line of sight, such as the Lighthouse or optical motion tracking.
Ongoing work
In terms of control and flight dynamics, the Flapper is very different from the Crazyflie. Thus, for autonomous flight, there remains room for improvement on the firmware side. We managed to include the “flapper” platform into the standard Crazyflie firmware (in master branch since November 2022, and in all releases since then), such that RC flying and other basic functionality works out of the box. However, as many things in the firmware were originally written only for a (specific) quadcopter platform, the Crazyflie 2.x, further contributions are needed to unlock the full potential of the Flapper.
With the introduction of “platforms” last year, many things can be defined per platform (e.g. the PID controller gains, sensor alignment, filter settings, etc.), but e.g. the Extended Kalman filter, and specifically the motion model inside, has been derived and tuned for the Crazyflie 2.x, and is thus no representative of the Flapper with very different flight dynamics. This is what directly affects (and currently limits) the autonomous flight within positioning systems – it works well enough at hover and slow flight, but the agility and speed achievable in RC flight cannot be reached yet. We are planning to improve this in the future (hopefully with the help of the community). The recently introduced out of tree controllers and estimators might be the way to go… To be continued :)
Thanks Matej ! And for those of you at home, don’t forget that we have our dev meeting next Wednesday (the 5th), where we’ll discuss about the Loco positioning system, but also will take some time for general discussions. We hope to see you there!
This week’s guest blogpost is from Florian Goralsky from Bok o Bok about their dance piece with multiple Crazyflies. Enjoy!
Flying bodies across the fields is a contemporary dance piece for four performers and a swarm of drones, exploring the phenomenon of the disappearance of bees and the use of pollinating drones to compensate for this loss. The piece attempts to answer this crucial question in a poetical way: can the machine create life and save us from ecological disaster?
We’re super excited to talk about a performance that we’ve been working on for the past two years in collaboration with Bitcraze. It premiered at the Environmental Forum, Centre Pompidou Paris, in 2021, and we’ve had the opportunity to showcase it at different venues since then. We are happy to share our thoughts about it!
Choreographic research
Beyond symbolizing current attempts to use drones to pollinate fields, the presence of the Crazyflie drones, supports the back and forth between nature and technology. We integrate a swarm, performing complex choreographies, which refer to the functioning of a beehive, including the famous “bee dance”, discovered by Karl von Frisch, which is used to transmit information on the food sources. Far from having a spectacular performance as its only goal, the synchronization of autonomous drones highlights bio-inspired computer techniques, focused on collective intelligence.
Making a dance performance with drones needs a high accuracy and adaptability, both before and during the show. Usually, we only have a few hours, sometimes even a few minutes, to setup the system according to the space. We quickly realized we needed pre-recorded choreographies, and hybrid choreographies where the pilot could have a few degrees of freedom on pre-defined behaviors.
GUI Editor + Python Server
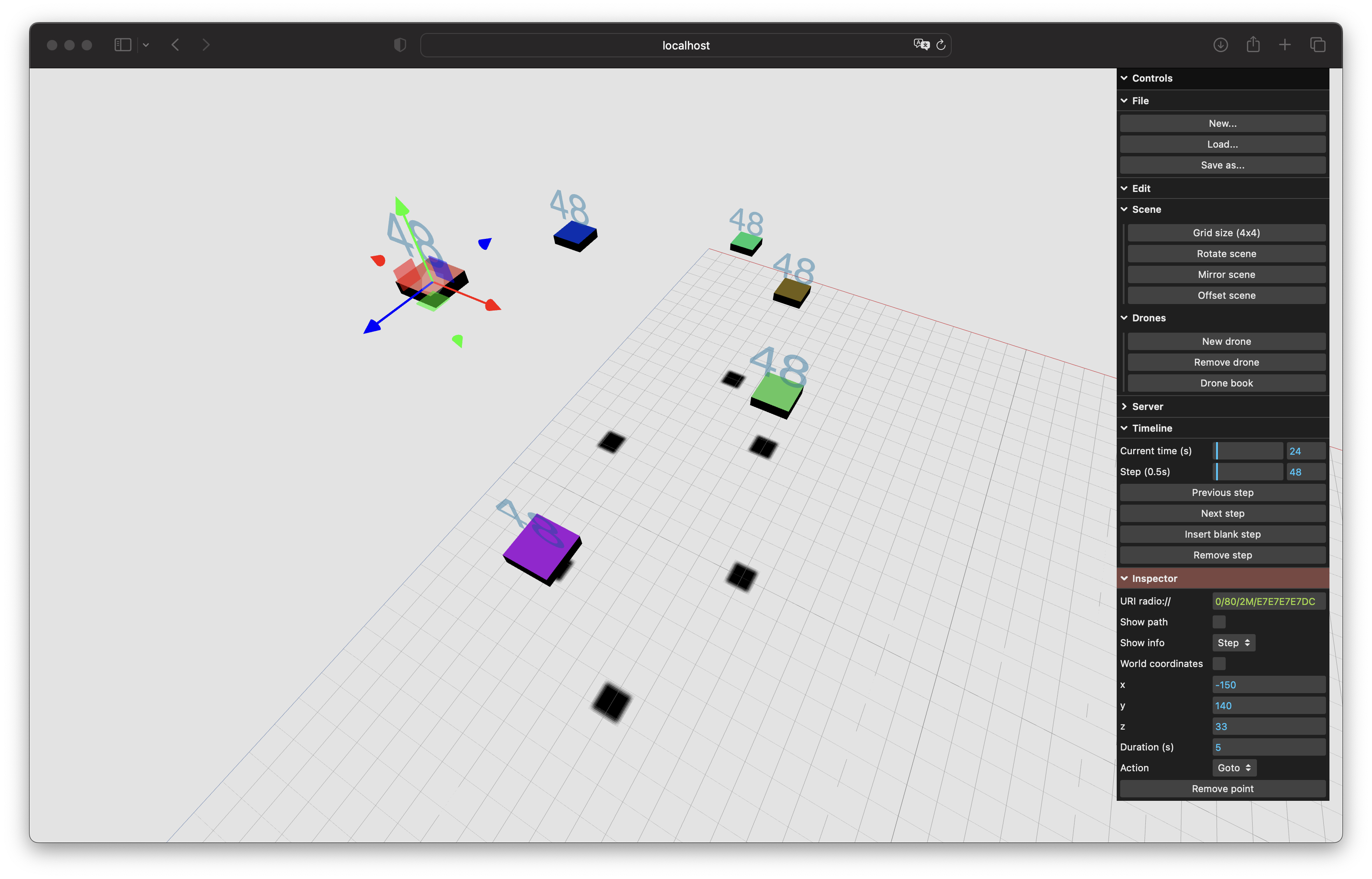
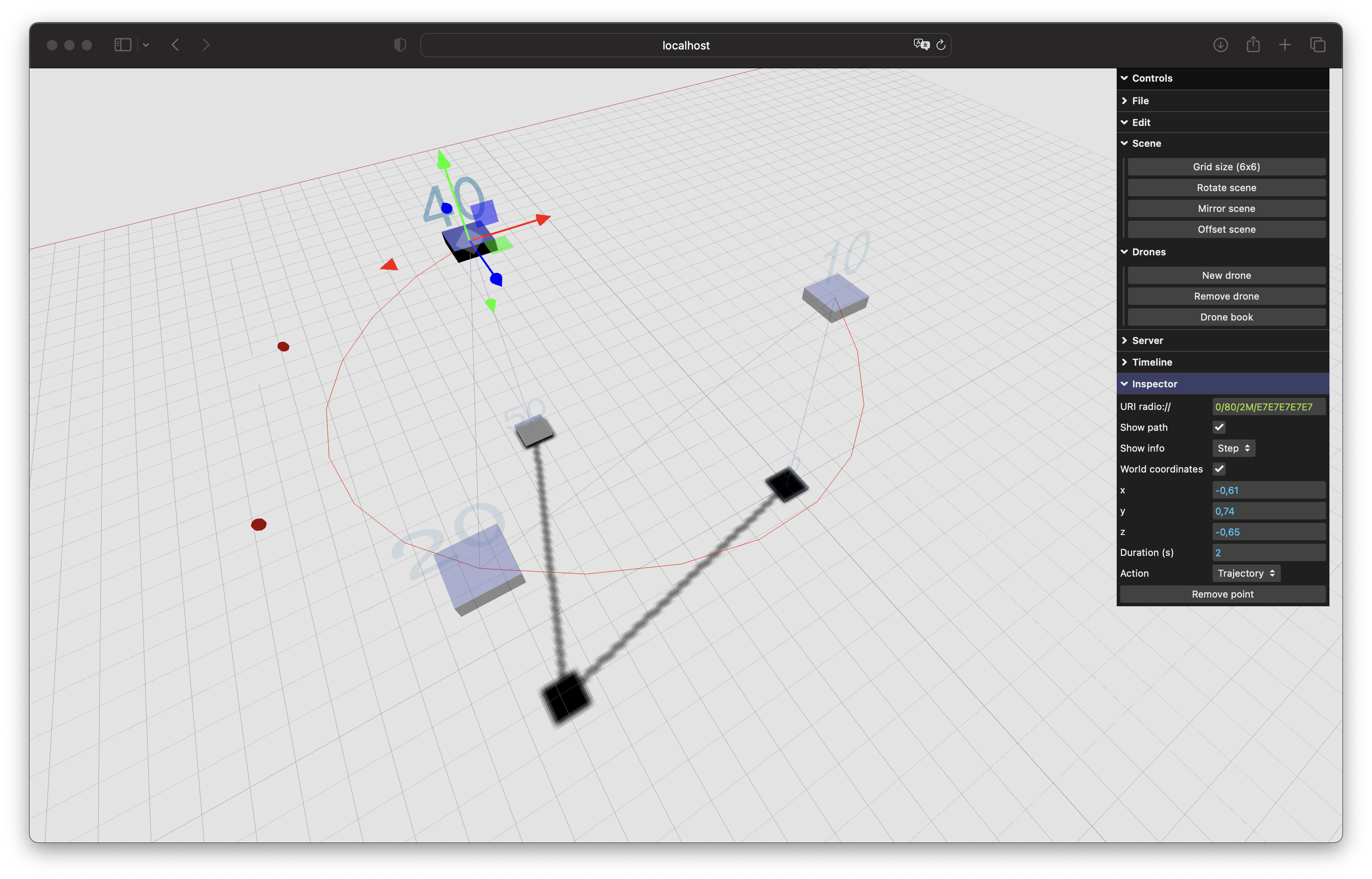
Taking this into account, we developed a web GUI editor, that is able to send choreographies created with any device to a Websocket Python server. The system supports any absolute positioning system (We use the Lighthouse), and then converts all the setpoints and actions to the Crazyflie API HighLevelCommander class. This system allows us to create, update, and test complex choreographies in a few minutes on various devices.
Preview position of six drones at a certain time.Early support of the CompressedTrajectories format, with Cubic bezier curves.
What is next?
We are looking forward to developing more dancers-drones interactions in the future. It will imply, in addition to the Lighthouse system, other sensors, in order to open up new possibilities: realtime path-finding, obstacle avoidance even during a recorded choreography (to allow improvisation), etc.
IROS in Kyoto is over and all Bitcrazers are finally back in Sweden again. We had a really good time in Japan and enjoyed all the interesting discussions we had with all of you, thanks!
The demo has similarities with our previous demo (see IROS 2019) but has been upgraded to be a fully autonomous and decentralized swarm with 9 Crazyflies buzzing around in a cage, going back to charging pads for wireless charging when the battery is running out. The demo supports multiple Crazyflies flying at the same time, avoiding collisions without a central authority, all decision making is done in each Crazyflie, that is fully decentralized.
The hardware is off-the-shelf products available in our store (links here). The software is obviously written specifically for the demo, but we wanted to use the building blocks already available in the system so the demo code is mainly “glue” to connect them together.
The cage/flying space
The flying space was box shaped, 3×2 meters in foot print and 2.5 meters high. We enclosed it in our lightweight travel cage made from aluminium pipes and a light net. It is a pretty small space to fly multiple Crazyflies in at the same time but it worked! The main problem with such a small space is down-wash from other Crazyflies and having enough room to avoid collisions. 3 Crazyflies worked pretty well, but had the space been larger it would have been possible to fly all nine.
Localization
Localization was handled by the Lighthouse positioning system. We used two base stations and the lighthouse deck on each Crazyflie which provides the Crazyflies with their current position with high accuracy.
Since the position is computed in the Crazyflie, using only data from on-board sensors, no external communication is needed in relation to the localization system. The only exception was that we uploaded the physical geometry of the system when setting up the cage.
Path planing
When a Crazyflie is flying in the demo, the standard mode of operation is to fly a randomized pattern of straight lines. From time to time (randomized) the Crazyflie can also chose to fly the spiral that we have used in earlier demos (see the IROS 2019 demo for instance).
When the battery is running out, the Crazyflie goes back to the charging pad for charging. The position is sampled before taking off and this coordinate is used as the landing point to find the charging pad. When landed the Crazyflie verifies that the battery is being charged. If the battery is not charging the Crazyflie assumes it missed the charging pad and it takes off again to adjust the position.
Charging
The Crazyflies were equiped with the Qi-charging deck for wireless charging. The charging pads are 3D-printed pads with a slope to make the Crazyflie slide into position also if the landing is not perfect. In the center of the pads there are standard Qi-chargers from IKEA mounted to provide power.
To fly continuously, the system charging rate must be higher than what is consumed by the flying Crazyflies. With a system of nine Crazyflies that are charging through Qi-chargers it is possible to keep one Crazyflie flying, just. To get some margin we increased the charging speed a bit, the down side being that the Crazyflies get warm and the batteries ware out faster.
Collision avoidance
We use the built in collision avoidance system contributed by James Alan Preiss at University of Southern California. Thanks James, it works like a charm!
There is no planing ahead, but each Crazyflie must know where the other Crazyflies are located. Based on this information they avoid each other and chose a new path to reach their target position. For this to work each Crazyflie is continuously broadcasting its position to the other Crazyflies using the peer-to-peer framework.
Swarm control and collaboration
As mentioned earlier there is no central authority that decides which Crazyflie that should take off or go to a specific position, instead this functionality is handled in each Crazyflie. To make it possible for each Crazyflie to have a rough idea of the system state, each Crazyflie is broadcasting its position and state (landed, flying etc) to the other Crazyflies. If a Crazyflie realizes that too few drones are flying, it will simply take off to fix the problem, if it sees that too many are flying it will go back to the charging pad. To avoid that all Crazyflies takes off or lands at the same time, a randomized hold-back time is used before the actions is executed. This does not fully prevent two individuals from taking off at the same time, but makes it less likely, and eventually the correct number of drones will fly.
The number of drones that should fly at the same time is a system wide parameter that can be set from one of the peers in the system. To make sure they all agree on the value, a simple mechanism is used based on the age of the data. The value and the age of the value is included in the broadcast data. When another Crazyflie receives the data it compares the age of the received data with the age of the data it already has and replaces it only if it is younger.
Sniffer
A tenth Crazyflie is used in the demo as a sniffer. It is essentially a non-flying member of the swarm that listens to the broadcast traffic and it is used to feed data to a GUI that displays the state of the system. It can also be used to inject a new value for the desired number of flying Crazyflies.
Implementation and how to run it
The code is mainly implemented as an app in the Crazyflie firmware, using the app layer. The main part is a state machine that keeps track of what to do next with some other modules handling communication and trajectories.
The examples/demos/decentralized_swarm/src/common_files/choose_app.h file controls if the code is compiled for a swarm member or the sniffer.
All Crazyflies should have the same radio channel and the same address, except the last byte. Swarm members must use addresses ending in 01 to 09 while the sniffer must use the address ending in 00.
Bolt DSHOT support for ESCs configurable via Kconfig
ESC pass-though configuration via USB (virtual COM port)
For more information (and files for the release) see the release notes and files on GitHub, the releases of the different projects are listed below. As always, we’re really eager to get feedback, so let us know if you try it out and how it works!
There are some nice and exciting improvement in the CF-client that we worked on during the summer months! First of all we worked on a toolbox structure, where every tab can be reconfigured as a toolbox as well, allowing it to be docked to the sides of the window. Secondly we have added a new geometry estimation wizard for Lighthouse systems to support multi base-station estimation. Finally we have added a new tab for PID controller tuning, mainly intended for the Bolt.
New tabs, toolboxes and wizards for the CFclient
Toolboxes in the CFclient
Everyone who used the CFclient has experienced the tabs before. Anytime you want to configure the lighthouse system, setup plotting or look at the parameter states, you switch to the appropriate tab to perform your desired action. This is all fine, but sometimes it can be useful to see the contents of two tabs at the same time, maybe you want to watch the graphing of a log variable at the same time as you change a parameter. This is what the combined tab/toolbox feature adds! Any tab can now be converted into a toolbox that can be docked to the side of the window.
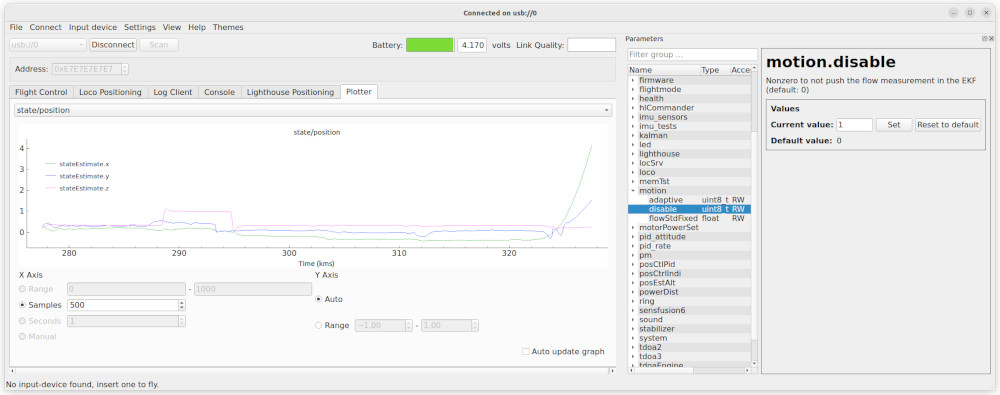
Plotter tab with parameter toolbox
In the example above the plotter is displaying the estimated position of a Crazyflie with a Flow deck, while the parameter window is opened as a toolbox. The “motion.disable” parameter was just set to true and we can see that the kalman estimator gets into trouble when it no longer gets data from the flow deck.
To switch from tab to toolbox mode, go to the View/Toolboxes menu and select the window that you want to show as a toolbox. In a similar way, use the View/Tabs menu to turn it back to a tab.
Even though all tabs can be turned into toolboxes, some of them might still look better as tabs due to their design. We hope to be able to improve the design over time and make them more toolbox friendly, contributions are welcome!
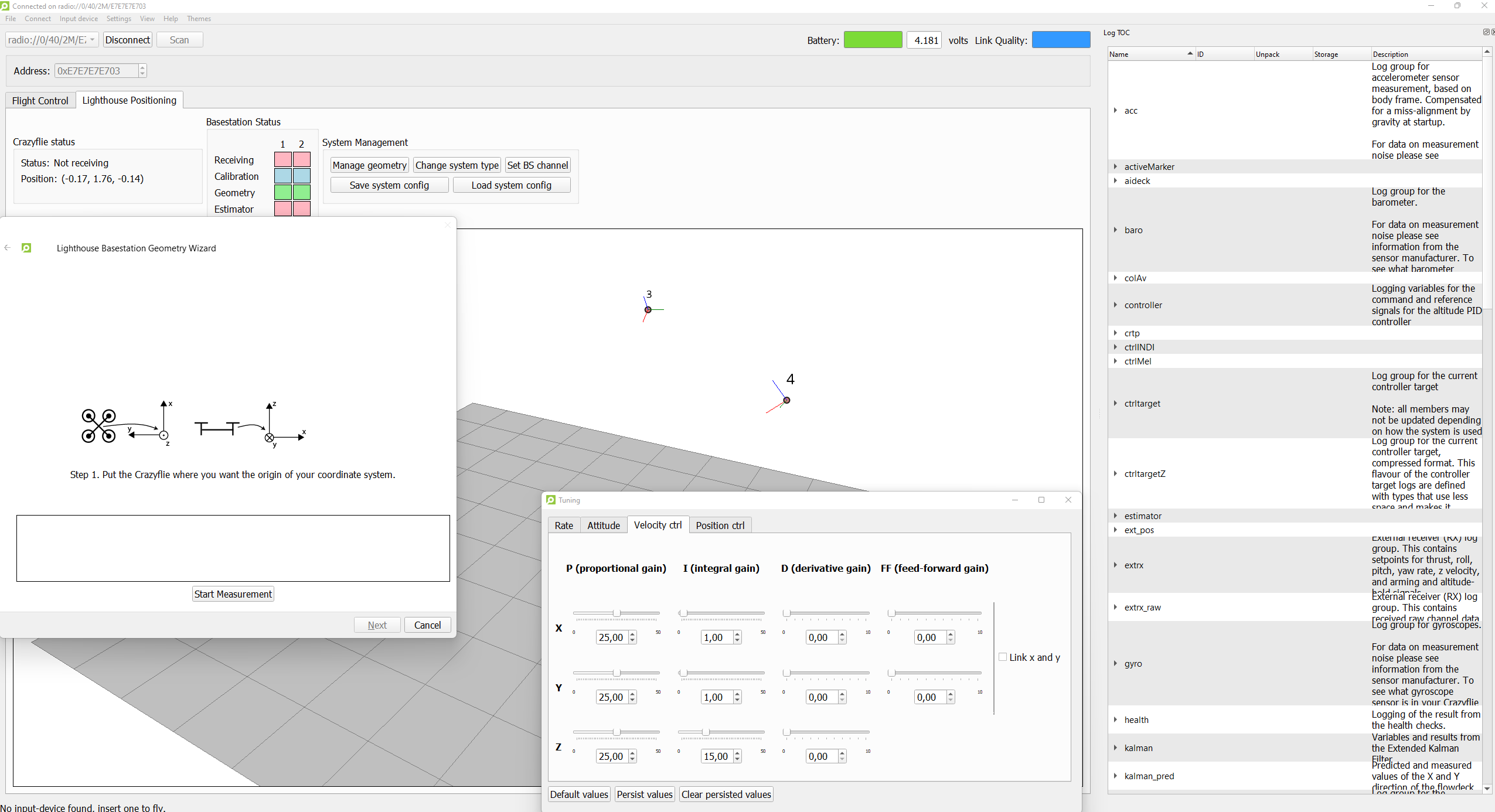
Lighthouse Geometry Estimation Wizard
In a blogpost of almost a half year ago, we presented a new multi base station geometry estimation method that enabled the user to include more than 2 base station for flying a Crazyflie. This heavily increases the flight area covered by the base station V2s, as technically it should be able to handle up to 16!
New geometry estimation dialog
However, up until this summer it has been in experimental mode as we weren’t so sure as how stable this new estimation method is, so the only way to use it was via a script in the Crazyflie python library directly, and not from the CFclient. Since we haven’t heard of anybody having problems with this new experimental feature, we decided to go ahead to make a nice multi base station geometry estimation wizard in the CFclient’s Lighthouse tab.
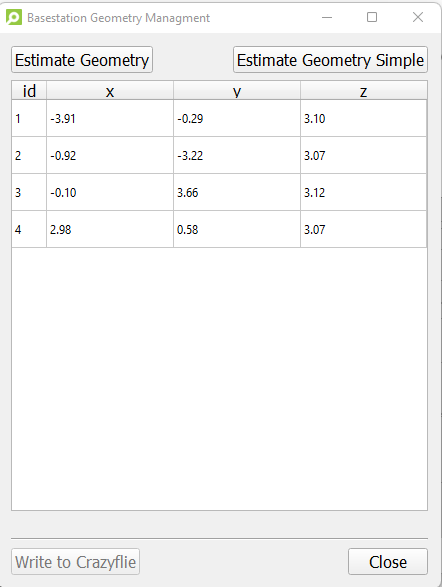
This wizard can be accessed if you go to the lighthouse tab-> ‘manage geometry’ and press ‘Estimate Geometry’. We had to make it a wizard as this new method requires some extra intermediate steps compared to the previous, to ensure proper scaling, ground plane setting and sweep angle recording. If you are only using 2 base stations this seems like extra effort, where you only had to put the Crazyflie on the ground and push a button, but if you compare flight performance of the two methods, you will see an immediate difference in positioning quality, especially around the edges of your flight area. So it is definitely worth it!
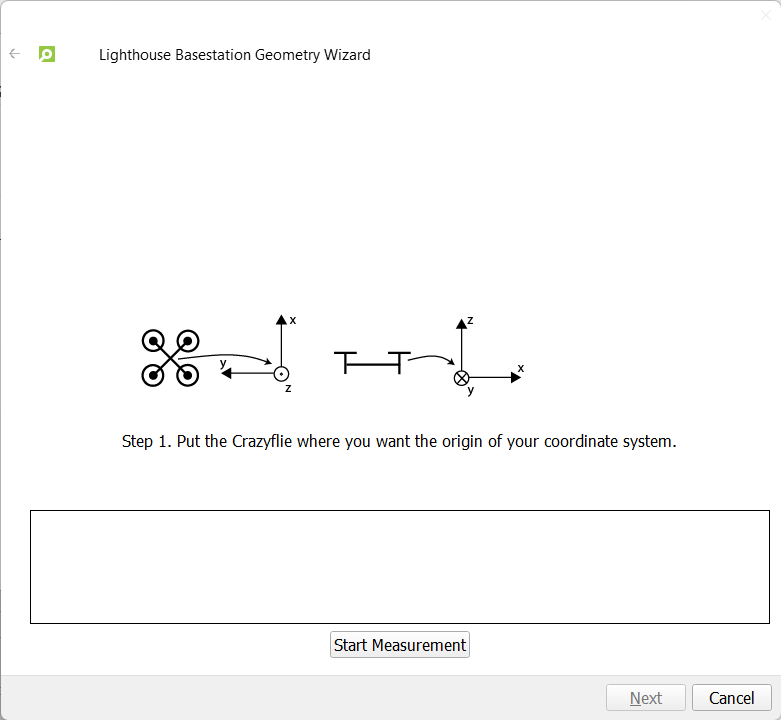
First page of the wizard
We will still provide the “simple” option for those that want to use it, or want to geometry estimate only one base-station, as we don’t have support for that for this new estimator (see this issue). In that case, you will have to install the headless version of opencv separately like ‘pip3 install opencv-python-headless’. We will remove this requirement from the cflib itself for the next release as there are conflicts for users who has installed the non-headless opencv on their system, like for the opencv-viewer of the AI-deck’s wifi streamer for instance.
PID tuning tab
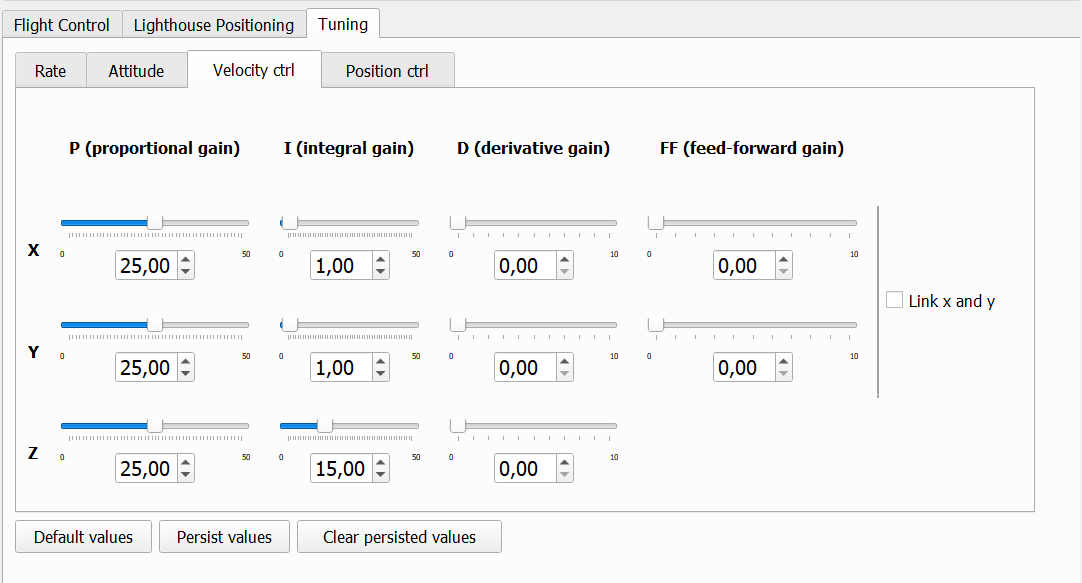
The PID controller tuning tab
And last but not least, we introduced an PID tuning tab in a PR in the CFClient! And of course… also available as a toolbox :) This is maybe not super necessary for the Crazyflie itself, but for anyone working with a custom frame with the Bolt or BigQuad deck this is quite useful. Tuning is much handier with a slider than to adjust each parameter numerically with the parameter tab. Also if you are just interested of what would happen if you would increase the proportional gain of the z-position controller of the crazyflie, this would be fun to try as well… but of course at your own risk!
If you are happy with your tuned PID values, there is the “Persist Values” button which will store the parameters in the EEPROM memory of the Crazyflie/Bolt, which means that these values will persist even after restarting the platform. This can be cleared with the ‘Clear persisted values’ button and you can retrieve the original firmware-hardcoded default values with ‘Default Values’ button. Please check out this blogpost to learn more about persistent parameters.
Try it out for yourself!
This client has not been released yet but you can already go ahead and try these new features out for yourself. Make sure to first install the client from source, and then install the CFlib from source, as an update of both is necessary. Also update the crazyflie-firmware to the latest development branch via these instructions, especially if you want to try out the new LH geometry wizard.
And of course, don’t forget to give us feedback on discussions.bitcraze.io or to make an issue on the cfclient, cflib or crazyflie-firmware github repositories if you are hitting a bug on your machine and you know pretty precisely where it comes from.
There is a new fresh release of both the firmware and the python library and client! The last release (2022.01) was from 2 months ago but we already added quite some extra functionality so we wanted to make a snapshot of this before continuing on other priorities.
Kbuild on CF firmware
One of the biggest changes that you will notice, is that there is now a new way to configure your Crazyflie firmware before building it. The old config.mk is gone and you will now need to either automatically generate a config file or generate one with the menuconfig, of which kbuild is most known for. For more information, please read the blogpost about this latest change, for the exception that we do prefer the users to use ‘make cf2_config’ as instructed in the 2022.03 version of the repo documentation.
Platform support for Bolt
We now defined the Bolt as a different platform. That means that for each release, there should now also be a bolt flavor zip file, next to the cf2 and tag zips, as you can see in the release page. Moreover, if you want to build the firmware to be Bolt compatible, you would first need to do ‘make bolt_defconfig’ to generate the needed configs with kbuild. For more information of how to add your own custom platform, please check out these instructions.
2+ Lighthouse base stations (experimental)
For those that feel constrained by the max 2 lighthouse base station support in the firmware and client, this functionality is now part of the release. This blogpost will explain more about this, and it is still experimental in nature, as you would need to reconfigure the firmware with… you guessed it: Kbuild! Also the geometry estimation needs to be done as a separate python script as well all from the Crazyflie python library. No worries, if you still prefer using the cfclient, it still uses the old way of estimating if you click the button, but just remember that you would need to do something extra in order to get 2+ base station support.
New VM release
We were also made aware of a pretty big error in the bitcraze VM, namely that we still used the old git:// type url for github repositories. IN the new release of the bitcraze VM this should be fixed, so please download the new one, or fix it yourself in your current VM by changing the remote URLs of the github repos you are working on to https://.