There has been some background work going on related to the Lighthouse system, as mentioned in a previous blogpost. The solution has been improved since that blog post and we believe the functionality is now on a level where it works pretty well and can add value to most Lighthouse users.
How to use it?
We have added a brief documentation to get you started. Though the solution has been stabilized, it is still a bit experimental and it has not been fully integrated into the client yet. The base station geometry estimator still has to be run as a python script from the command line, and a reconfigured version of the Crazyflie firmware has to be built and flashed.
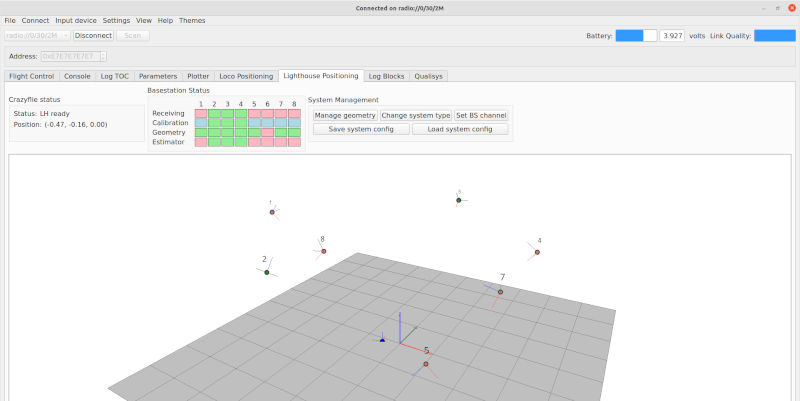
We have added some improvements to the client thought to enable it to display base station status for 2+ base stations. This was the final part of the client UI that did not support 2+ base stations, and now remains only the possibility to run the new geometry estimation from the client.
Benefits
What kind of improvements does it bring?
First of all, the functionality to use more than 2 base stations and the possibility to cover a larger flight space. It also makes it possible to set up multi-room systems to support flight from one room to another.
Secondly an improved estimation of the base station geometry (also when using 2 base stations) that generally reduces the errors and improves the position estimation of the Crazyflie when flying. “Jumping” of the estimated position when one base station is occluded should be reduced. When following a trajectory that is straight line through space, the Crazyflie should now actually fly on a fairly straight line, previously the flown path might be a bit curved.
The new solution has a better match to the physical world and hopefully the estimated Z will be closer to zero when the Crazyflie is on the floor, with the “old” method, the solution sometimes is slightly tilted with a Z != 0 in some areas.
Problems
Most of the Lighthouse system works just like before, the new functionality is related to base station geometry estimation. The “standard” geometry estimation is still available in the client and if you continue to use this nothing is changed, the following list is for the new estimation method.
The new geometry estimation is a bit clunky to use and the user still has to rebuild the firmware and run a python script.
Lighthouse 1 is not fully supported
The new geometry estimation does not work with one base station.
We hope to address the above problems in future releases.
Release
Talking about releases, we are working on a new official release. If no unforeseen obstacles are found, we plan to make a new release within a week or two.
The functionality discussed in this blog post is still only in source code, on master or possibly in some pull requests. If you wait for the release all repositories should be syncronized and make it a bit easier to try out.
Feedback
As the environment of the system has an impact on this type of functionality, we would love to get feedback from you if you try it out. We’d love to hear how it works for you!
Keeping things in stock has not been easy the last couple of years due to the general problems with availability of components. We have been mitigating this by increasing stock volumes when it has been possible, but we have also looked at redesigns of some products to be able to switch to other components. A positive side effect has been that it also enabled us to do some small changes we wanted to do for a long time.
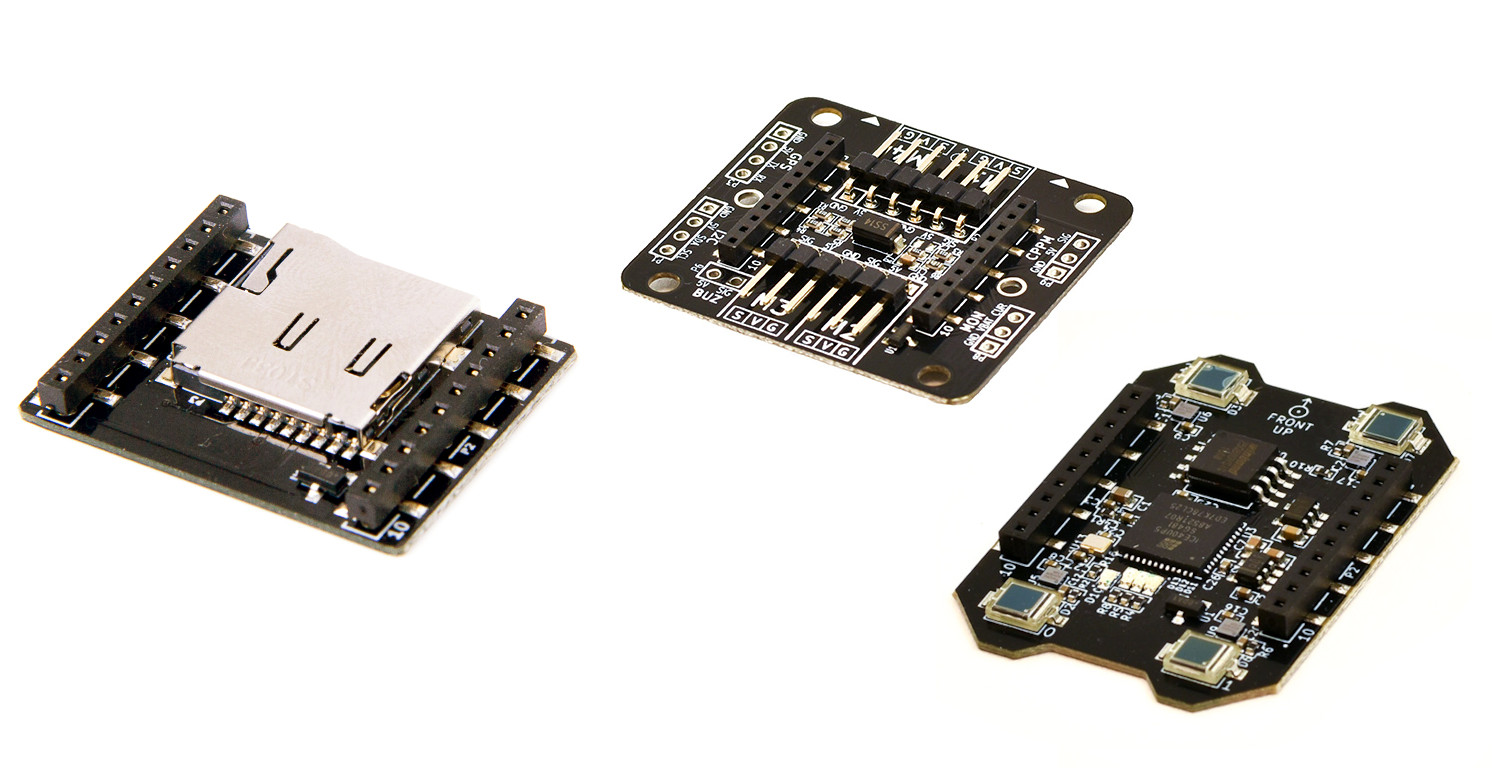
The decks we have updated are the Lighthouse, SD-card and BigQuad decks. There are no big functionality changes so the decks have not gotten any updated version only a new board revision.
Lighthouse (Rev.D -> Rev.D1) The outline of the PCB has changed a bit in the hope of protecting the photo-diode sensors a bit better during hard crashes.
SD-card (Rev.C -> Rev.D) Some solder bridges were added to the bottom of the PCB to make it easier to utilize the “hidden” SPI port. This can be useful if wanting to log a lot of values to the SD-card in combination with decks using the SPI port as well, such as the Loco or Flow decks. See the datasheet for more details.
Biq-Quad (Rev.C -> Rev.C1) The capacitor C1 was removed. This was used to filter the analog current measurement reading but also caused problem for the SPI bus on the deck port. The SPI bus turned out to be a more used functionality and therefore capacitor C1 was removed. If the analog filtering functionality is wanted, a 100nF 0603 capacitor can be soldered to C1.
From now on we ship the updated revisions if you order in our store.
Jonas is leaving Bitcraze
We are sad to announce that Jonas is leaving Bitcraze. He has been involved in a lot of Github management, setting up the Crazy Stabilization lab, and various improvements and tools within our eco-system. Although he will be missed, we are excited that he is able to start a new chapter in his live and hope the best for him in his future endeavors.
Base station geometry estimation is a function in the python client (in the lighthouse tab), where the system estimates the position and orientation of the base stations. The user places the Crazyflie on the floor (in the desired origin) and clicks a button to measure the angles to the base stations, which are used to estimate the geometry. The current implementation is fairly basic and has some issues associated with it:
All base stations must be received from the point where the Crazyflie is located
Only 2 base stations are supported
The coordinate system is not properly aligned with the room
The generated geometry is not as good as it could be, that is the position/orientation is sub-optimal
The code has a dependency to OpenCV which causes problems for ROS users
I have been working on a solution for these problems as my fun Friday project and in this blog post I will tell you a bit more about the problems and a possible solution.
Screenshot from the client of a geometry with 4 base stations.
What are the problems to be solved?
In the current implementation, the user places the Crazyflie in the origin, with the front of the Crazyflie pointing in the direction of the positive X-axis. When the user hits the “Estimate Geometry” button, the angles to the visible base stations are recorded and the solvePnP() function in OpenCV is used to estimate their poses (position and orientation). This is all fine but it also has its limitations and in the following section we will outline what the limitations are and how to solve them.
All base stations must be received in the origin and only 2 base stations are supported
Currently the Crazyflie ecosystem supports up to 2 base stations and this works fine for a flight space of around 4×4 meters. With more base stations it would be possible to cover larger areas or multiple rooms, which is a feature that many users have been asking for. In these scenarios it will not be possible to receive all base stations from one position any more though, and it will require a new method for geometry estimation using multiple measurements. Suppose base station 1 and 2 are received in one position and 2 and 3 in another, then we can map the measurements together since we know base station 2 must have the same pose in both measurements. This way it is possible to relate all base station poses to each other, provided there are measurements that link them together.
The coordinate system is not properly aligned with the room
When generating the geometry in the current implementation, the orientation of the Lighthouse deck is used to define the coordinate system: forward of the deck defines the X-axis, left defines the Y-axis and up the Z-axis. The problem is that the deck might not be perfectly aligned with the Crazyflie, the floor might not be completely flat or the Crazyflie might not point exactly in the desired direction. A pretty small misalignment will result in fairly large errors a couple of meters away, resulting in unexpected behavior, for instance not flying at constant height. Expanding to more base stations and larger systems, the problem will become even bigger and a better solution is clearly needed.
If we used the position of the Crazyflie when placed at multiple positions, we could use this information to rotate the coordinate system to be better aligned. For instance, suppose we measured some points on the floor of the flight space, then we could make sure the XY-plane of the coordinate system goes through those points, or at least as close as possible. Similarly one or more measurements along the X-axis would help to define the rotation around the Z-axis.
The generated geometry is not as good as it could be
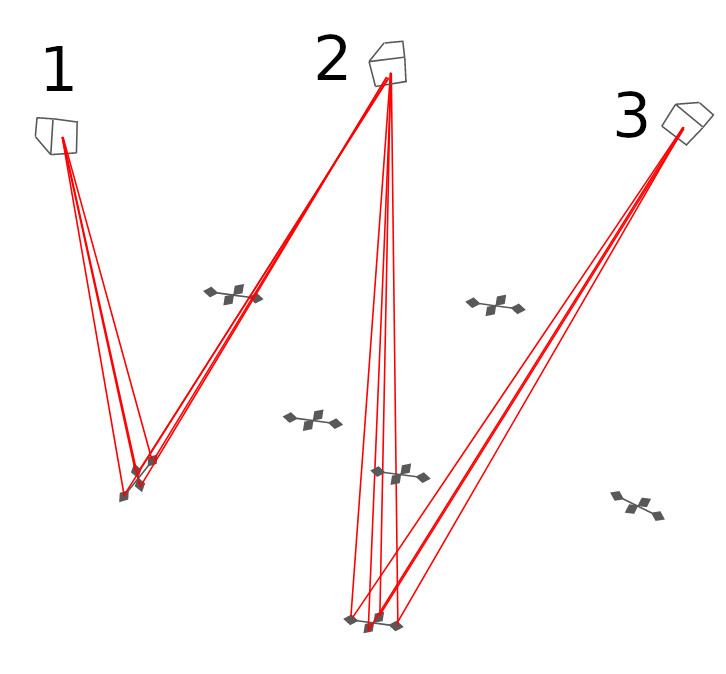
The lighthouse positioning system is based on measuring the angles between the sensors on the Lighthouse deck and the base stations. One can think of it as four beams or rays, going from each base station to the sensors on the deck, for which we measure the direction very precisely seen from the base station’s point of view. The purpose of the geometry estimation is to figure out the position and orientation of the base stations so that we can calculate how the beams are oriented in the flight space instead. By looking at where the beams from two base stations intersect we know where the sensors are located and can calculate the position of the Crazyflie. This is a somewhat simplified picture of how it works but it is sufficient for the following discussion.
So what happens if the geometry is not completely correct? If the estimated positions or orientations of the base stations are slightly off, the beams will not intersect and we have to use some method to find the point closest to the two beams instead to use as the sensor position. In a real world system there will always be errors and the implementation must be able to handle them, but we want to keep them as small as possible. Further more we want to make sure the errors are uniformly distributed in the flight space so that we get equally good results everywhere.
In the current estimation process, where we take a measurement in one position, we are able to generate a geometry that is good at that point, but due to noise in the measurements and other subtleties the error at the edges of the flight space might be several centimeters.
The solution to this problem is to measure the angles in multiple positions and try to find a geometry where the error is equally small for all of them. It does not guarantee that the error will be equal everywhere, but if we make measurements in the volume we plan to fly in we know it will be OK where we need it to be. It should also be a much better geometry, for the full covered volume, than what we can be achieved by measuring in one point only.
One bonus problem that hopefully will be solved by this approach is the moving back and forth that sometimes can be seen in a Lighthouse 2 system. What happens is that the base stations interfere with each other from time to time (by design) and most of the time the Crazyflie gets positioning information from both base stations, but every couple of seconds only from one of them. When both are available the “average” position is used, but when only one is received, the Crazyflie will “jump” to the position indicated by that base station (the simplified model from above with crossing beams does not hold in this case, sorry!). If the difference between the suggested positions of the two base stations (the error in the geometry) is large there will be a noticeable motion in the Crazyflie.
The code has a dependency to Open CV
In the current solution we use the solvePnP() function in Open CV to estimate the geometry. Open CV is an awesome library but unfortunately it has turned out that this dependency interferes with ROS, and since a fair amount of our users also use ROS, we would like to get rid of it if possible.
Luckily I found an open source implementation of IPPE, an algorithm that finds the pose of an object based on points seen by a camera, that we can use instead. There is actually an option to use Ippe in OpenCV’s solvePnP(), but we used another flavor.
The solution
The core idea is to first collect measurements of beams in many positions in the flight space by moving a Crazyflie around and record the lighthouse angles. Secondly an equation system is created that takes the poses of the base stations and all the recorded Crazyflie poses as input and as output calculates the lighthouse angles those poses would correspond to for all the sensors. Finally the output is compared to the recorded values and poses are adjusted using the least-square solver in scipy to find the poses that minimizes the difference between the measurements and the output from the equation system.
Before we can solve the equation system we have to record the angles from the base stations. There is a handy function in the Crazyflie that pushes measured lighthouse angles to the PC via the radio, and by letting the user move the Crazyflie around in space we get the angles along that path. What we are looking for though are angles collected in discrete positions and as an approximation I group measurements together based on time. The assumption is that if two angle measurements are closer than 10 ms in time, the Crazyflie did not move very far and they can be considered to be taken in the same position. The output of this process is a list of samples where each sample contains the measured lighthouse angles of one or more base stations for one specific Crazyflie pose. After this has been done, the list is filtered to only contain samples with two or more base stations.
We also need an initial guess of the base station and Crazyflie poses for the least-square solver to make the solution converge. I use IPPE for this and use the first sample as the reference to define a temporary global reference frame. Suppose the first sample contains angles for base stations 2 and 3, we can then use IPPE to calculate an estimate of the pose of the two base stations, in the Crazyflie reference frame of this sample. Since we use the first sample as the reference for the global reference frame (that is the pose of the Crazyflie in this sample is the origin by definition), those poses are also equal to the base station poses in the global reference frame.
Suppose the next sample contains lighthouse angles for base stations 1 and 2, using IPPE we can estimate the base station poses for base stations 1 and 2 in the reference frame of the Crazyflie in this sample. Since the relative positions of the base stations is the same, regardless of reference frame, we can rotate/translate the poses of the base stations so that base station 2 pose matches the pose of base stations 2 in the first sample. We now have an estimate of the poses of base stations 1, 2 and 3, further more the transformation used represents the pose of the Crazyflie in sample 2. Repeating the process for all samples gives us a pretty good idea of where all the base stations are located as well as the pose of the Crazyflie in all the samples.
We can now feed the initial guess and the equation system into scipy and hopefully get a refined solution back. From the estimated poses of the base stations and Crazyflie samples it is possible to calculate the distance between sensors and beams which gives us an approximation of how good the solution is.
The final step is to align the coordinate system with the room, as mentioned earlier the solution we have this far is based on the pose of the Crazyflie in the first sample. The way it is done in the suggested implementation is to ask the user to place the Crazyflie at some points in the desired origin, on the positive X-axis and in the XY-plane and measure the angles in these positions. The measurements are included as samples in the above process which means we will get the estimated positions as a part of the over all solution, in the temporary global reference frame. The task at hand is then to find the rotation/translation from the temporary global reference frame to the one indicated by the positions sampled by the user. Again we do a least-square optimization to find the transformation that minimizes the error in the sampled points. We can now calculate the final solution by applying the transformation to the base station poses we got earlier.
Does it work?
Yes, it seems to work pretty well, I have not had the time to do extensive testing yet but the results looks promising. In our flight arena with 4 base stations, the solution seems to generally be acceptable. We don’t know the exact poses of our base stations since it is very hard to measure, but they are mounted in the same truss and should be at similar heights.
The above snippet is part of the output from one run and as can be seen the estimated height is between 2.96 and 3.02 m. You can also see that the estimated average error for sensor positions is in the order of 2-3 mm while the maximum error is 1.5 cm.
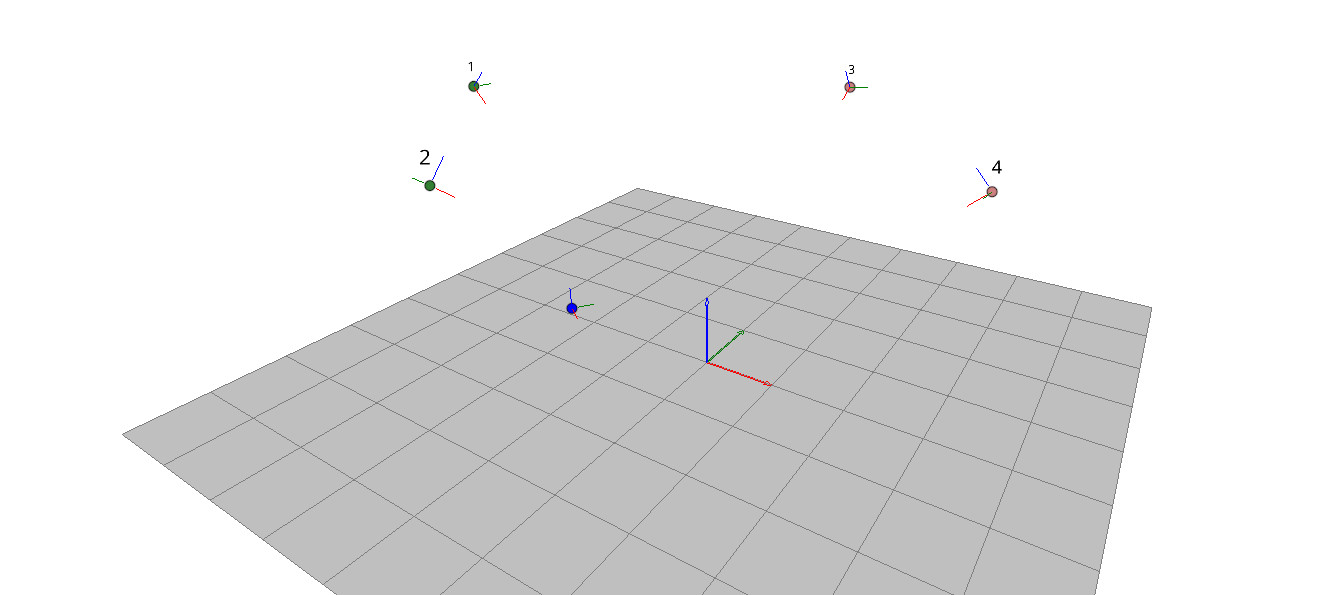
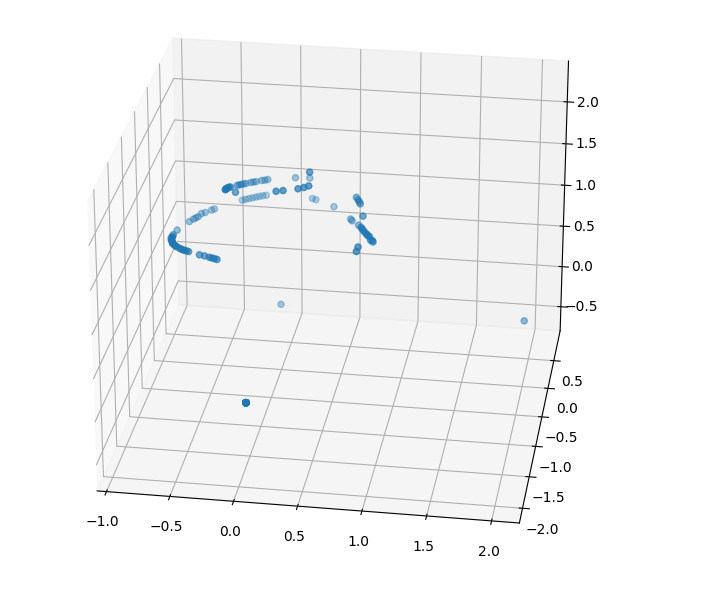
Below is graph of the recorded Crazyflie positions in the final solutions. Note the three single points at the bottom that are from the origin, the X-axis and XY-plane.
Estimated positions of the Crazyflie
I did some testing on larger systems with 6-8 base stations this Friday and it seemed to be harder to get a solution that converges which indicates that there might be something to look into here.
Try it out
This is still work in progress, but if you want to try it out, you can find the code in this pull request. Run the examples/lighthouse/bs_geometry_estimation.py script, you will get instructions on the screen as you go.
Officially the firmware supports 2 base stations , but most of the code is designed to handle up to 16 and if you want to test the functionality with more than two base stations you have to update PULSE_PROCESSOR_N_BASE_STATIONS and re-flash your Crazyflie.
Ever since we released the Lighthouse deck back in 2019, we’ve wanted to offer a bundle with the deck and the base stations. There’s multiple reasons for this, but the main reason was that we wanted users to be able to buy a full swarm (like the Loco Positioning Swarm) directly from us, without having to find the base stations separately. Initially this seemed easy to do, but it turned out to be a bit tricky. This post is about how we finally managed to get the Lighthouse Swarm Bundle finished and into the E-store.
The Lighthouse swarm bundle
When the Lighthouse deck was initially released it only had support for Lighthouse V1 base stations, but Ligthouse V2 was already out. Since the V1 base stations were already in short supply, we wanted to support V2 since this was what would be available in the future. We had started looking at V2 support, but there was still ongoing efforts from us (and others) to reverse engineer the protocol. After some prototyping we had some initial support, but there was still a lot of infrastructure work to be done before it could be released.
In parallell with this work we started trying to buy the Lighthouse V2 base stations. Normally there’s two options here, either buy from local distributors or buy directly from the manufacturer. Buying from local distributors wasn’t a good option for us since these will only have local power plugs and buying directly from the manufacturer often requires very large orders. So this process quickly stalled. But after a couple of months we got an offer to buy a bulk shipment of Ligthouse V2 base stations (without box or power adapters) which we finally decided to accept. And yeah, that’s me looking really happy next to a bunch of base stations…
Marcus looking happy about the base stations
With a bunch of base stations at the office, work with sourcing a power adapter and creating a box started. Unfortunately the number of COVID-19 cases started rising again shortly after receiving the base stations, so we started working more from home again. And with only 2 persons at the office at a time, it’s hard to work with hardware. Different team-members needs access to different resources, like the electronics labs, flight arena or packing orders. So getting box/adapter samples from manufacturers, doing testing and getting input on physical objects from other team-members quickly went from days to weeks.
Finally, after a couple of months of testing, evaluating and learning lots about adapters and cardboard, we had good candidates. But then, literally as we’re ordering the power adapters, it turns out the certification was not good for all the regions we wanted. Thankfully this time around we already had other options so we quickly decided on the second best option (now the best option) and ordered.
In the meantime work was underway finalizing the implementation of Lighthouse V2, including client support, firmware updates of the Lighthouse deck and documentation/videos. Finally in the beginning of 2021 we got documentation and the full implementation (although only for 2 base stations) in place (blog post).
After a bit more than a month of waiting, the power adapters and boxes finally showed up at our office. With all the supplies in place, we started preparing for the packing. Since you can buy base stations for multiple sources, we wanted to keep track of the base stations that we were sending out to be able to debug issues users might have with these units. Also, even though the base stations had already been factory tested, we wanted to quickly test them before shipping them out. So our flight arena was turned into a makeshift assembly line and we had some outside help come in to do the packing.
Finally, the end result! We’re really excited to be able to offer yet another swarm bundle, the Lighthouse swarm bundle. And we’re pretty happy about how the packaging turned out :-)
If you haven’t visited our store in a while, you may have missed our new addition: the Lighthouse Swarm bundle!
We’ve been working for some time now on improving the Lighthouse decks and its positioning system. Earlier in the year, we have brought the Lighthouse deck out of early access. While working with it, we have seen the great possibilities and the accuracy of this new positioning system. Thanks to Steam’s VR base station that we use as an optical beacon, the Crazyflie calculates its position with an accuracy better than a decimeter and millimeter precision. It gives a tracking volume of up to 5x5x2 meters with sub-millimetre jitter and below 10 cm accuracy while flying. It’s perfect for a swarm, as it’s accurate, precise and autonomous. We’ve flown our Crazyflies with it a number of time and seen some awesome stuff with it!
As an example, here is a demo we’ve shown on a conference back in October. We’ve used 8 Crazyflies equipped with Lighthouse decks and Qi chargers, to make a spiraling swarm. A computer orchestrates the Crazyflies and make sure one is flying at all times, while the others re-charge their batteries on their pads. After a pre-programmed trajectory is finished or when the battery of the flying Crazyflie is depleted, it goes back to its pad while another one takes over. The demo had an all-in mode that runs the trajectory on all Crazyflie with sufficient charge at once, the result is quite impressive and demonstrate the great relative precision of the Lighthouse system:
After the launch signal is sent to the Crazyflies, the computer is not required anymore: the Crazyflie will autonomously estimate its position from the lighthouse’s signals. The Crazyflie can estimate its own X, Y and Z in a global coordinate system.
What’s great with the Lighthouse Swarm is that it allows you to do drone research even if you’re on a tighter budget.
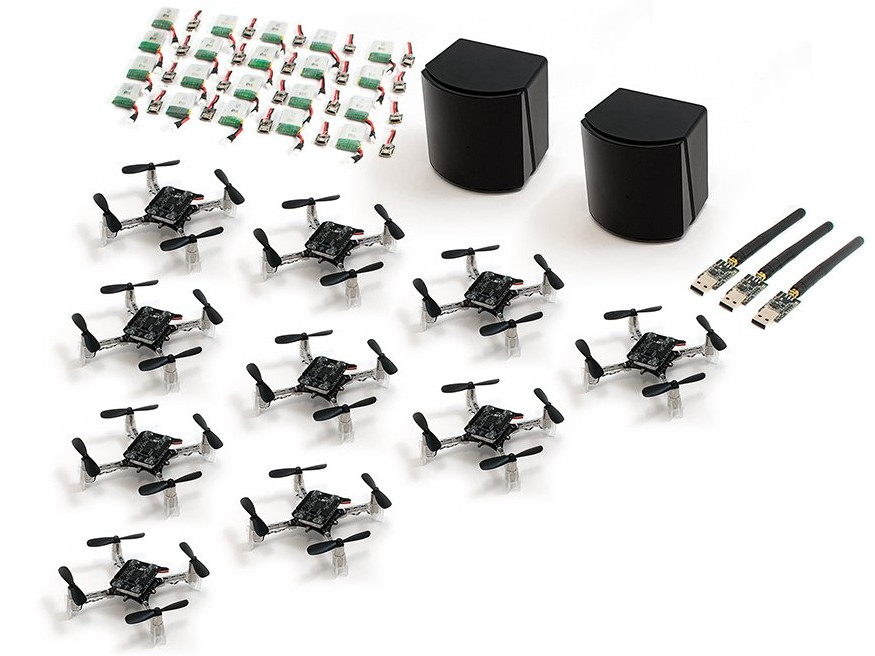
And when we got the opportunity to acquire our own base stations (that are also available in the shop by the way), it seemed only logical to offer a Swarm bundle similar to our Loco swarm bundle. So what’s in it ?
While the positioning will work with one base station, two base stations will allow better coverage of the flight space and better stability; as Kimberly can attest, it’s even possible to set it in your kitchen. The Crazyradios allow communication between the Crazyflies and your computer.
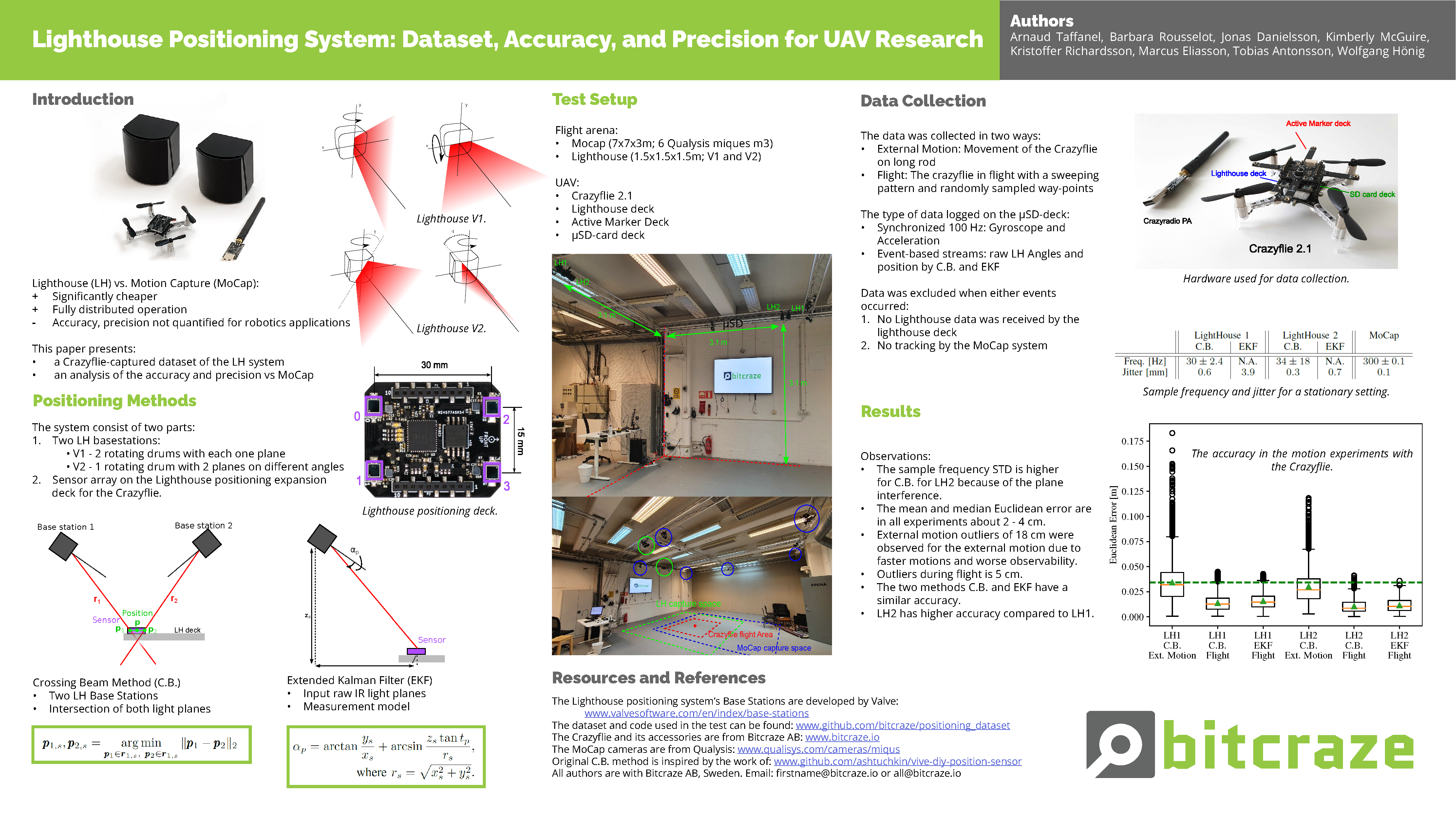
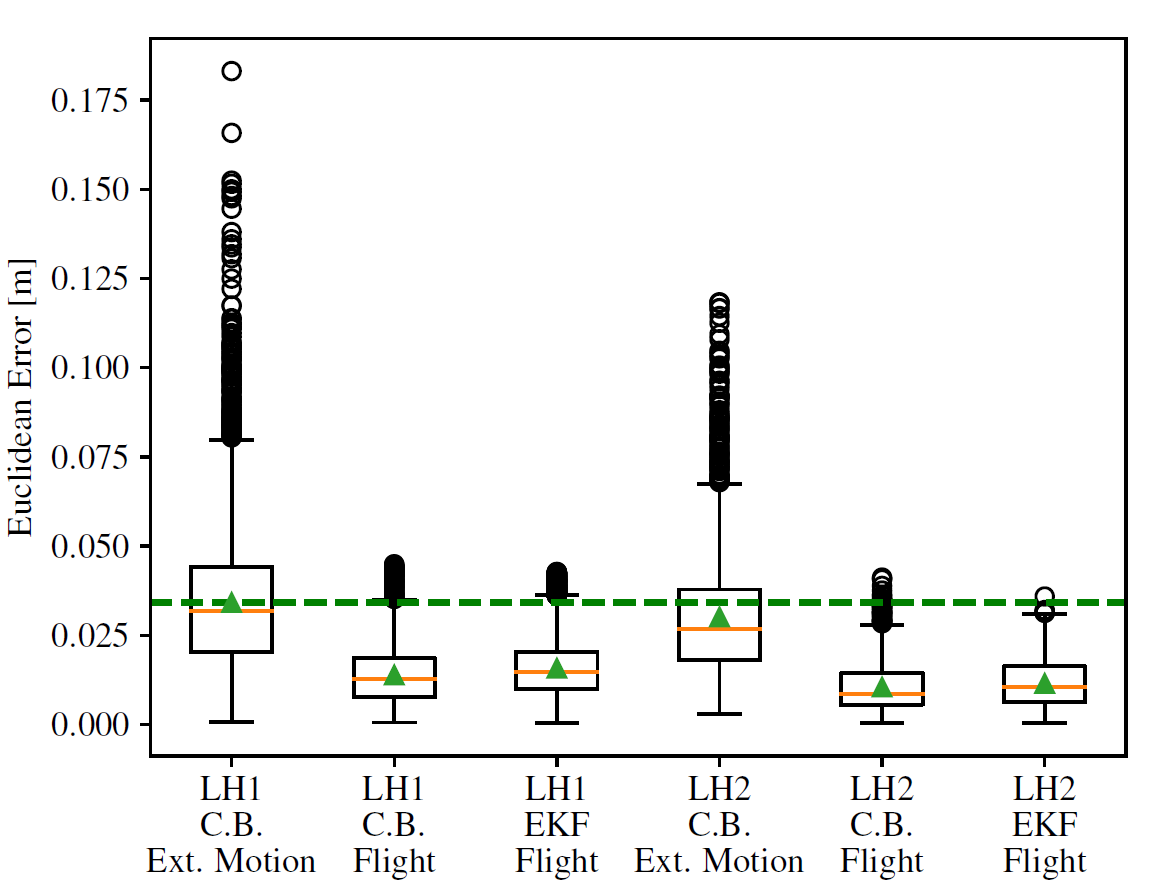
We dedicated a lot of time to the Lighthouse this winter, writing a paper with the help of Wolgangs’ calibration expertise. In this paper, we compared both Lighthouse V1 and V2 with the MoCap system. In all cases, the mean and median Euclidean error of the Lighthouse positioning system are about 2-4 centimeters compared to our MoCap system as ground truth. You can check the paper here, but here is a brief summary we used for our ICRA workshop:
The poster presenting our paper
We are now quite excited to get to see what you will do with this exciting new swarm bundle !
And if you don’t know how to set up the Swarm, you can get started at least with your Lighthouse system in this tutorial or watch Kristoffer explain it in this video:
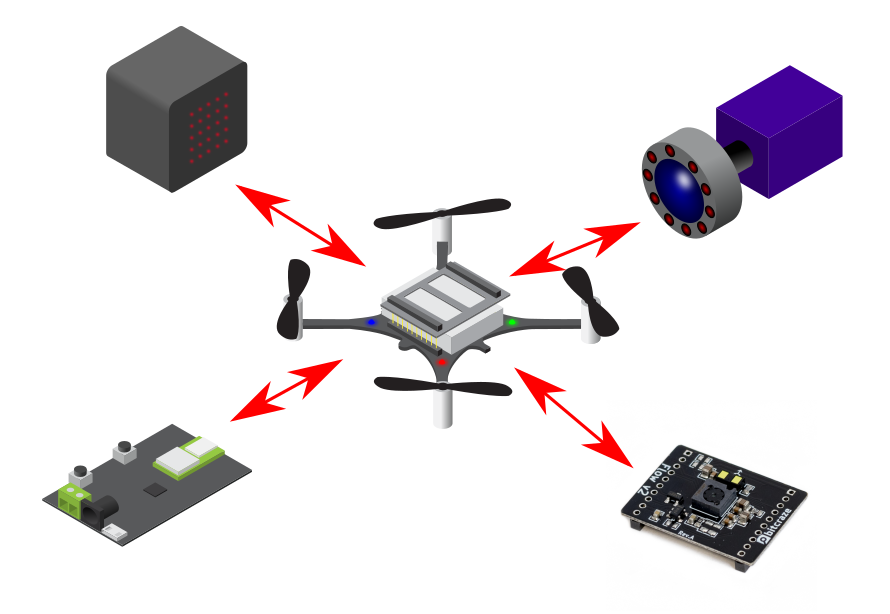
As you have noticed, we talk about the lighthouse positioning a lot these last couple of months ever since we got it out of early release. However, it is good to realize that it is not the only option out there for positioning your Crazyflie! That is why in this blog-post we will lay out possible options and explain how they are different/similar to one another.
The four possible ways to position the crazyflie
Absolute Positioning / Off-board Pose Estimation
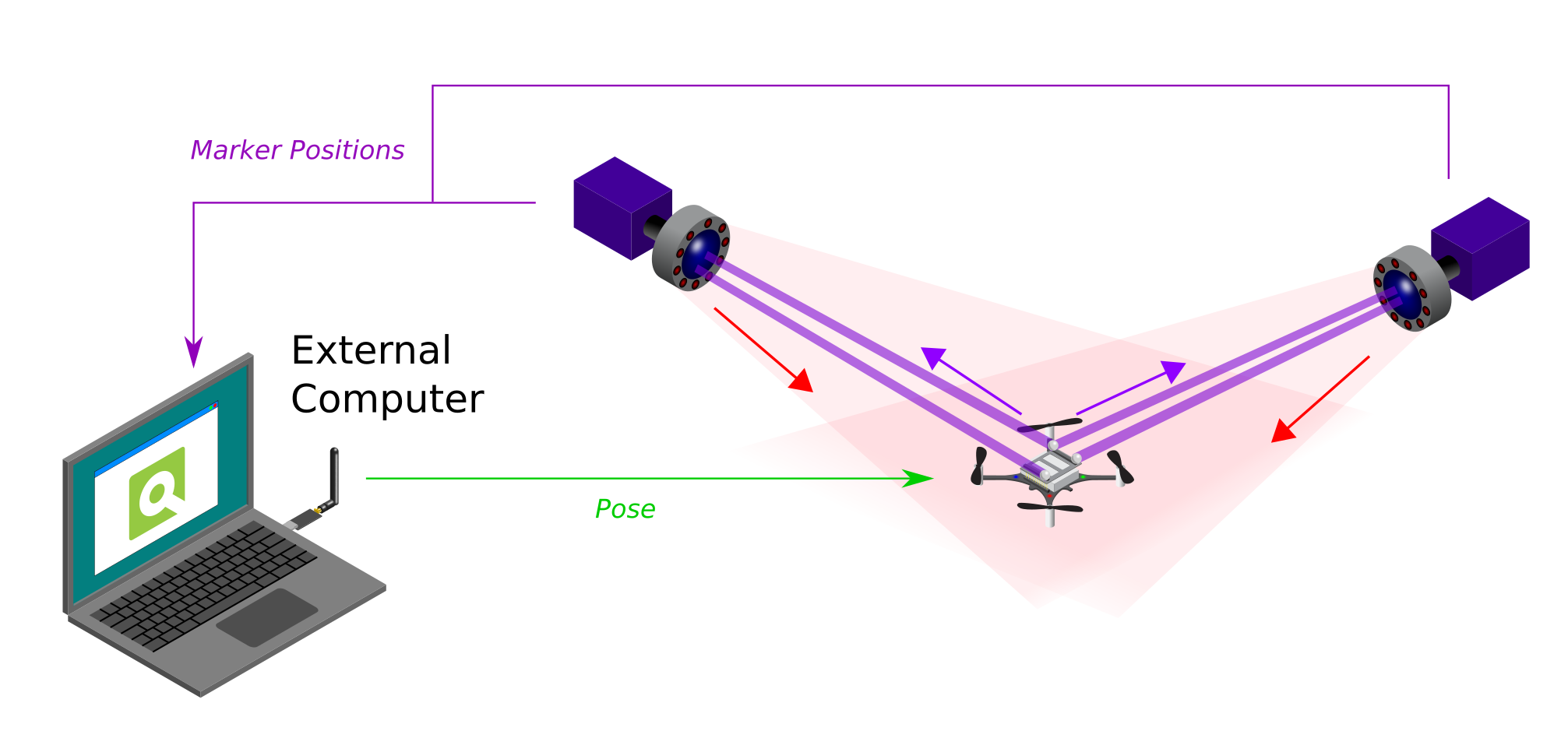
Absolute Positioning and External Pose Estimation with the MoCap System
The first we will handle are the use of motion capture systems (MoCap), which resolves around the use of InfraRed cameras and Markers. We use the Qualysis camera ourselves but there are also labs out there that use Vicon or Optitrack. The general idea is that the cameras have an IR-light-emitting LED ring, which are bounced back by reflective markers that are supposed to be on the Crazyflie. These markers can therefore be detected by the same cameras, which pass through the marker positions to an external computer. This computer will have a MoCap program running which will turn these detected markers into a Pose estimate, which will in turn be communicated to the Crazyflie by a Crazyradio PA.
Since that the positioning is estimated by an external computer instead of onboard of the crazyflie, a MoCap positioning system is categorized as an off-board pose estimation using an absolute positioning system. For more information, please check the Motion Capture positioning documentation.
Absolute Positioning / On-board Pose Estimation
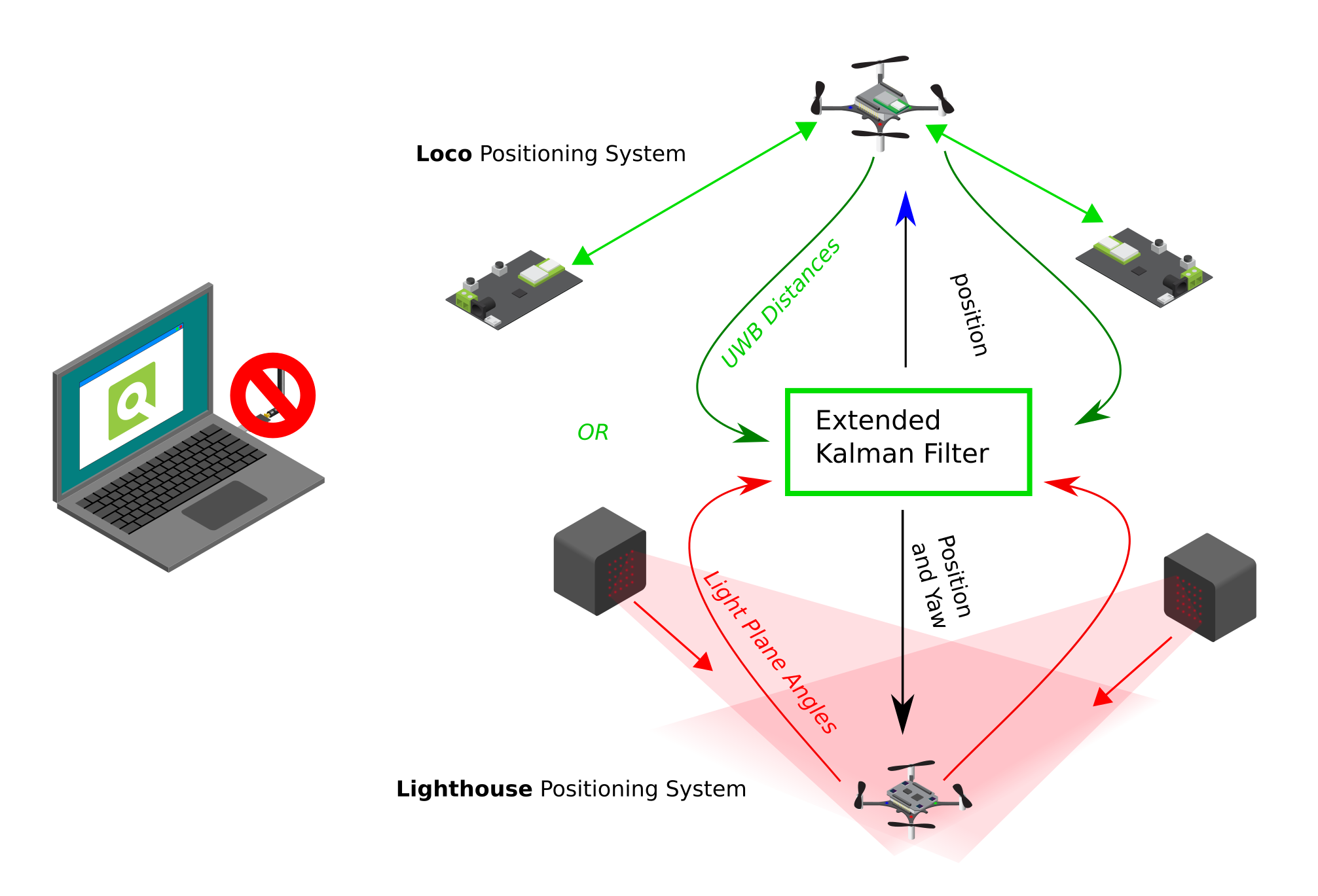
Absolute Positioning and Internal Pose Estimation with the Lighthouse and Loco Positioning System
The next category is a bit different and it consists of both the Loco positioning system and the Lighthouse positioning system. Even though these both use beacons/sensors that are placed externally of the Crazyflie, the pose estimation is done all on-board in the firmware of the Crazyflie. So there is no computer that is necessary to communicate the position back to the Crazyflie. Remember that you do need to communicate the reference set-points or high level commands if you are not using the App layer.
Of course there are clear differences in the measurement type. A Crazyflie with the Locodeck attached takes the distance to the externally placed nodes as measured by ultra wide band (UWB) and the Lighthouse deck detects the light plane angles emitted by the Lighthouse Base Stations. However the principle is the same that those raw measurements are used as input to the Extended Kalman filter onboard of the Crazyflie, and outputs the estimated pose after fusing with the IMU measurements.
Therefore these systems can be classified as absolute positioning systems with on-board pose estimation. To learn more please read the Loco and Lighthouse positioning system documentation!
Relative Positioning / On-board Pose Estimation
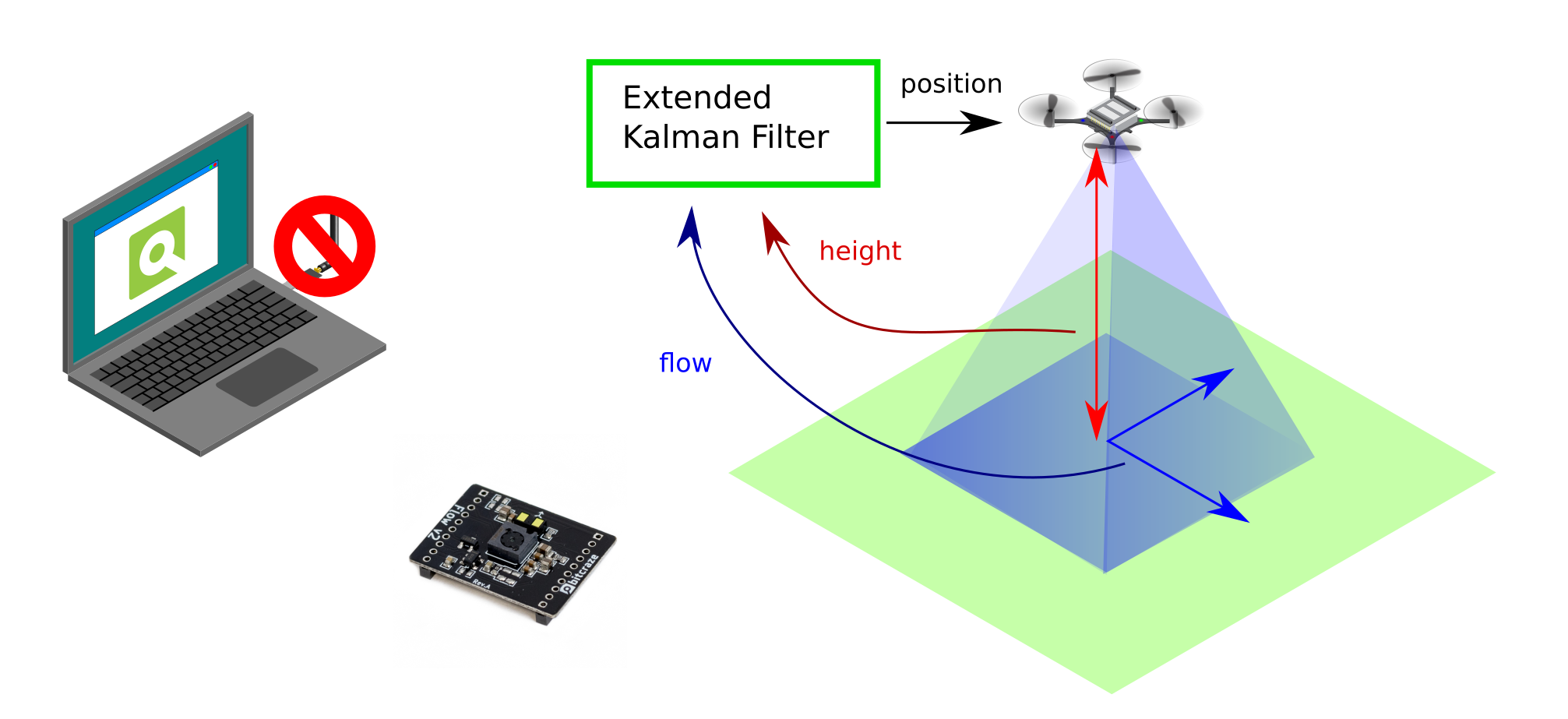
Relative Positioning and Internal Pose Estimation with the Flowdeck V2.
It is not necessary to have to setup an external positioning system in your room in order to achieve a form of positioning on the Crazyflie. With the Flowdeck attached, the Crazyflie can measure flows per frame with an optical flow sensor and the height in millimetres with a time of flight sensor. These measurements are then fused together with the IMU within the Extended Kalman filter (see the Flow deck measurement model), which results in a on-board pose estimation.
The most important difference here to note is that positioning estimated by only the Flowdeck, will not result in a absolute positioning estimate but a relative one. Instead of using an external placed system (like MoCap, Lighthouse and Loco) which dictate where the zero position is in XYZ, the start-up position the Crazyflie determines where the origin of the coordinate system is. That is why the Flowdeck is classified as a Relative Positioning System with On-board Pose Estimation.
IMU-only On-board Pose Estimation ?
Oh boy… that is a different story. Theoretically it could be possible by using the onboard accelerometers of the crazyflie and fusing those in some short of estimator, however practice has shown that the Crazyflie’s accelerometers are too noisy to result in any good pose estimation… We haven’t seen any work that has been successfully to achieve any stable hover on only the IMU of the Crazyflie, but if you have done/see research that has, please let us know!
And if you would like to give a go yourself and build an estimator that is able to do this, please check out the new out of tree build functionality for estimators. This is still work in progress so it might have some bugs, but it should enable you to plugin in your own estimator separate from the Crazyflie firmware ;)
Documentation
We try to keep keep all the information of all our positioning systems on our website. So check out the positioning system overview page to be referred to more details if you would be interested in a particular system that fits your requirements!
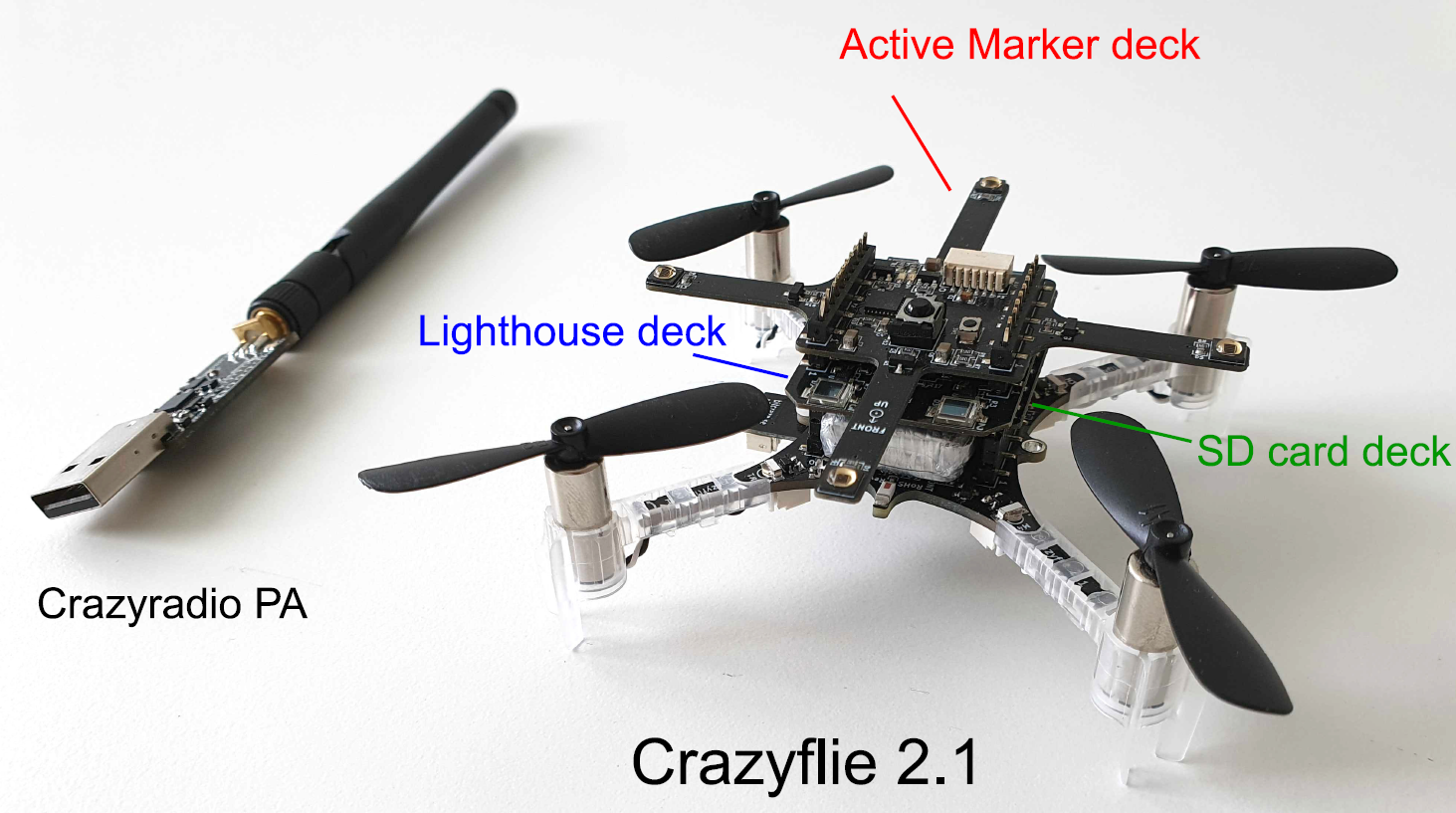
During Wolfgang Hönig‘s time here at Bitcraze, one of the bigger projects we worked together on was to generate a dataset comparing the positioning quality of the Lighthouse system with a Motion Capture (MoCap) system. You could imagine that would be a difficult task, since as the lighthouse basestations transmit infrared light sweeps and MoCap cameras by default also emit IR light which are reflected back by markers. However, with the Active marker deck for the Qualysis system, we were able to use the MoCap and Lighthouse positioning without too much interference.
Moreover, Wolfgang also helped out with improving the logging quality on the Micro-SD-card deck which also enabled us to get as much data real-time as possible. He wrote a blogpost about event-based logging a few weeks ago which is a new approach to record data on the Crazyflie at a fast pace. With the Active Marker Deck, the Micro-SD-card deck and of course the Lighthouse deck, … the Crazyflie turn into a full-blown positioning data-collection machine!
The configuration of the Crazyflie with the Micro-SD-card deck, the Lighthouse-deck from the lighthouse dataset paper
This paper contains an short explanation of the lighthouse system, how we set up the data collection and an analysis of the results, where we compared both Lighthouse V1 and V2 with the Crossing beam (C.B.) method and the extended Kalman filter. In all cases, the mean and median Euclidean error of the Lighthouse positioning system are about 2-4 centimeters compared to our MoCap system as ground truth.
The Euclidean Error of both LH1 and LH2 with Mocap as ground-truth taken from the dataset paper.
ICRA Swarm Workshop
Our paper is selected for a poster presentation at the ICRA 2021 Workshop: Robot Swarms in the Real World. So if you have any questions about the paper, please join and ask us in person! The workshop will be held on the 4th of June.
Moreover, we also are sponsoring the event by giving away a Lighthouse Swarm Bundle to whomever wins the best video-demonstration award! So to all the participants, the best of luck! We are super curious to what you’ll have to show us.
A few weeks ago we released version 2021-03 including the python library, Cfclient and the firmware. The biggest feature of that release was that we (finally) got the lighthouse positioning system out of early access and added it as an official product to the Crazyflie eco system! Of course we are very excited about that milestone, but the work does not end there… We also need to communicate how to use it, features and where to find all this new information to you – our favourite users!
New Landing Page
First of all, we made a new landing page for only the lighthouse system (similar to bitcraze.io/start) we now also have bitcraze.io/lighthouse. This landing page is what will be printed on the Lighthouse base station box that will be available soon in our store, but is also directly accessible from the front page under ‘Product News’.
This landing page has all kinds of handy links which directs the user to the getting started tutorial, the shop page or to its place within the different positioning systems we offer/support. It is meant to give a very generic first overview of the system without being overloaded right off the bat and we hope that the information funnel will be more smooth with this landing page.
New tutorial and product pages
For getting started with the lighthouse positioning system, we heavily advise everybody to follow the new getting started tutorial page, even if you have used the lighthouse system since it’s early access days. The thing is is that the procedure of setting the system up has changed drastically. The calibration data and geometry are now stored in persistent memory on-board the Crazyflie and the lighthouse deck itself is now properly flashed. So if you are still using custom config.mk, hardcode geometry in the app layer or use get_bs_geometry.py to get the geometry… stop what you are doing and update the crazyflie firmware, install the newest Cfclient, and follow the tutorial!
We also already made some product page for the Lighthouse Swarm bundle. Currently it is still noted as coming soon but you can already sign up to get a notification when it is out, which we hope to have ready in about 1-2 month(s). The lighthouse deck was of course already available for those that can not wait and want to buy a SteamVR base station somewhere else. Just keep in mind that, even though the v1 is supported, in the future we will mostly focus on the version 2 of the base stations.
Video tutorial
Once again we have ventured into the land of videos and recorded a “Getting started with the Lighthouse positioning system” tutorial for those who prefer video over text.
Feedback
We love feedback and want to improve! Please don’t hesitate to contact us on contact@bitcraze.io if you have comments or suggestions!
The main feature in this release is the stabilization of the Lighthouse positioning system. The main work done has been on the system setup and management, it has taken a lot of work spawning all the projects and a brunch of documentation, but we think we have reached a stage where the lighthouse positioning system is working very well and is very easy to setup and get working. We have now published the new Lighthouse getting started guide and will be working this week at updating all required materials to mark Lighthouse as released!
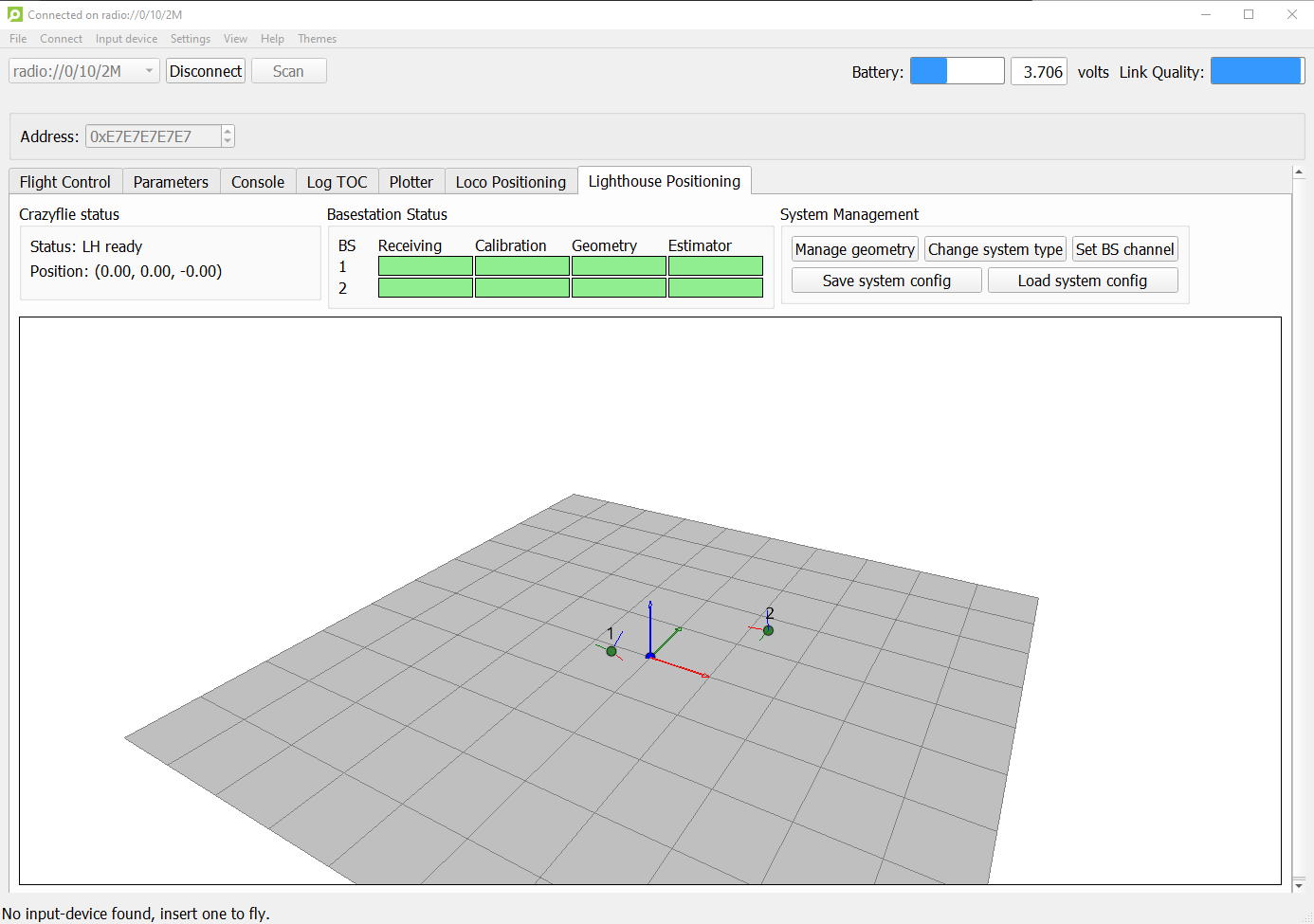
When the Lighthouse positioning system was released in early access, it required to install SteamVR, run some custom scripts and flash a modified firmware to get up and running. This has been improved slightly over time with scripts that allows to setup the system without using SteamVR and some way to store the required system data in the Crazyflie configuration memory rather than hard-coded in the firmware. With this release, everything is coming together and it is now possible to go from zero to an autonomous Crazyflie flying in a lighthouse system in minutes by just using the Crazyflie client.
Lighthouse positioning setup and management tab in the Crazyflie client
Another major improvement made to support the lighthouse is the modification of the bootloader Crazyflie update sequence in the client as well as in command line. The new sequence will restart the Crazyflie a couple of times while upgrading the Crazyflie, this allows for an upgrade of the firmware in the installed decks if required. The lighthouse deck firmware has been added to the Crazyflie .zip release file and will be flashed into the deck while flashing the release to a Crazyflie that has the deck installed.
An alternative, robust TDoA implementation has been added for the Loco Positioning System. This change has been contributed by williamwenda on Github and can optionally be enabled at runtime.
An event subsystem has also been added to the firmware. It allows to log events onto the SD-Card which can be very useful when acquiring positioning data from the various positioning system supported by the Crazyflie. We have described this subsystem in an earlier blog post.
There has also been a lot of smaller improvement and bugfixes in this release. See the individual project releases not for more information.
We hope you are going to enjoy this new Crazyflie and lighthouse release. Do not hesitate to drop a comment here, questions on the forum if you have any or bug reports of github in the (very unlikely ;-) event that there are bugs left.
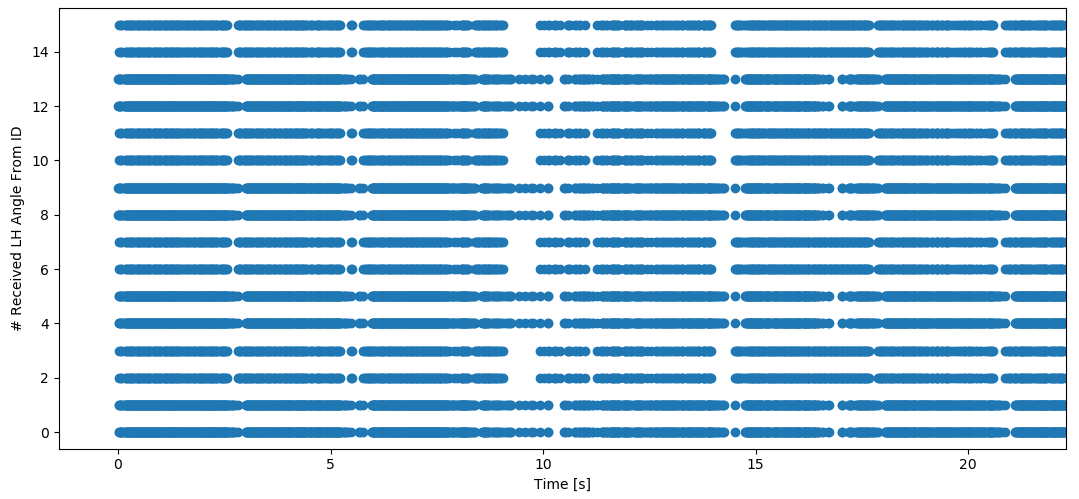
One crucial aspect of any research and development is to record and analyze data, which then can be used for quantifying performance, debugging strange behavior, or guide us in our decision making. We have been trying to improve the way that this is done to help all of you researcher out there with their work, so this blog post will explain an alternative, better, method to record whatever is happening on the Crazyflie in real-time.
Example data collection of received Lighthouse angles over time. The y-axis contains a unique measurement ID (16 in total for 4 sensors * 2 basestations * 2 sweeps/basestation). Thus, each dot represents the time when a certain kind of measurement was received. We do not receive all angles in fixed intervals, because of the interference between basestations.
Existing Logging Approaches
So far there have been two principle ways of recording data with the Crazyflie:
Logging: In the firmware, one can define global variables that can be streamed out at a fixed frequency, using logging configurations. Variables have a name and data type, and the list of all available variables can be queried from the firmware.
Debug Prints: It is possible to add DEBUG_PRINT(…) in any place that contains a string and possibly some variables. These are asynchronous, but not timestamped, so they are mostly useful to notify the user of some status change.
Both approaches have multiple backends. The logging variables can be streamed over USB, via the Crazyradio, or on a Micro-SD-card using a specialized deck. When using the radio or USB, the frequency is limited to 100 Hz and only a few variables can be streamed at this speed due to bandwidth limitations. The Micro-SD-card deck, on the other hand, allows to log a lot more logging variables at speeds up to 1 kHz, making it possible to access high-speed sensor information, e.g., the IMU data. The Debug Prints can be used over the radio or USB, or with a SEGGER J-Link and a Debug Adapter, over J-Link Real-Time Transfer (RTT). The former is very bandwidth limited, while the latter requires a physical wire connection, making it impossible to use while flying.
New Approach: Event-Based Logging
Event-based logging combines the advantages of the existing approaches and offers a third alternative to record data. Similar to debug prints, a user can trigger an event anywhere in the code and include some mandatory variables that describe this event (so-called payload). Similar to logging, these events are timestamped and have fewer bandwidth limitations. Currently, there is just one backend for the Micro-SD-card deck, but it would be possible to add support for radio and USB as well.
One of our first test cases of the event-based logging is to analyze the data we get from the Lighthouse deck. Here, we trigger an event whenever we received a raw sweep. This allows us to visually see the interference that happens between two LH2 basestations. We also use the event-based logging for time synchronization of the Crazyflie and a motion capture system: when we enable the IR LEDs on the active marker deck, we record an event that contains the Crazyflie timestamp. On the PC side, we record a PC timestamp when the motion capture system first detects the IR LEDs. Clock drifts can be computed by using the same logging mechanism when the IR LEDs are turned off.
Adding event-based logging had some other good side effects as well: the logging is now generally much faster, there is more user feedback about the correct buffer size usage, and the binary files are smaller. More details are in the documentation.
Future Work
We are working on adding event triggers to the state estimator. This will enable us to record all the sensor information during real flights with different positioning systems, so that we can tune and improve the Kalman state estimator. It will also be interesting to add support for events in CRTP, so that it can be used over USB and radio.