As mentioned in this blog post, we added the possibility to write apps for the Crazyflie firmware a while ago. Now we have added more functions in the Firmware to make it possible to use apps for an even wider range of tasks.

The overall idea of the app API is to mirror the functionality of the python lib. This will enable a user to prototype an application in python with quick iterations, when everything is working the app can easily be ported to C to run in the Crazyflie instead. The functions in the firmware are not identical to the python flavour but we have tried to keep them as close as possible to make the translation simple.
An app is also a much better way to contain custom functionality as the underlying firmware can be updated without merging any code. The intention is that the api API will be stable over time and apps that work one version of the firmware also should work with the next version.
Improvements
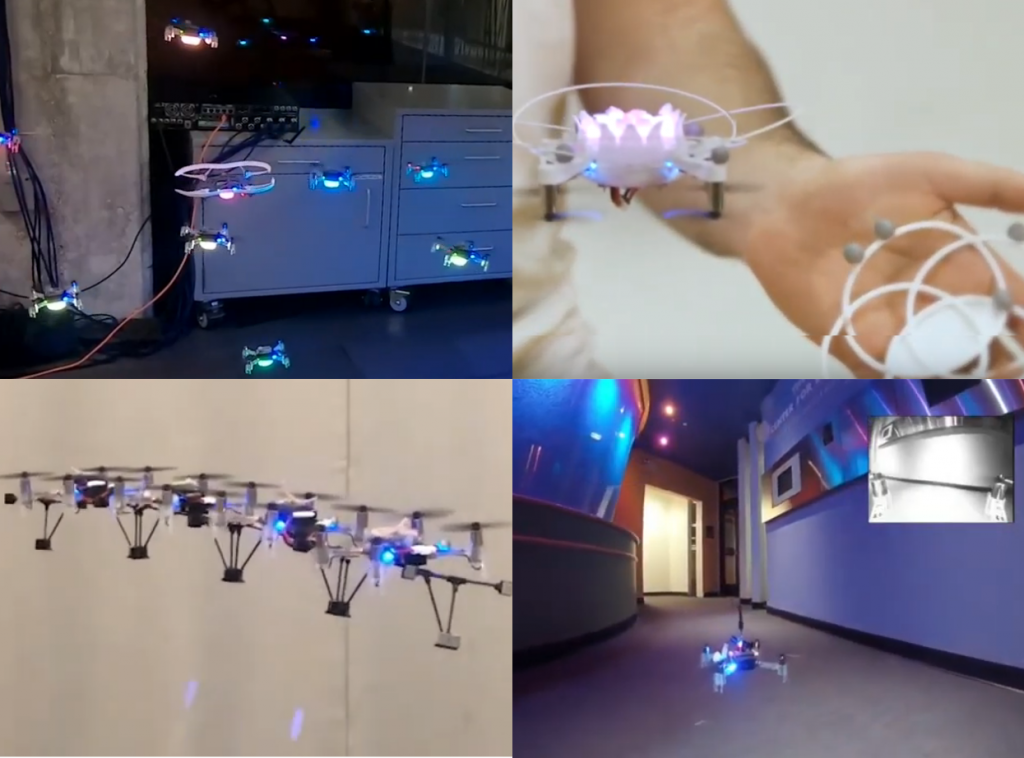
We used our demo from IROS and ICRA (among others) with a fairly autonomous swarm as a driver for the development. The demo used to be implemented in a branch of the firmware with various modifications of the code base to make it possible to do what we wanted. The goal of the exercise was to convert the demo into an app and add the required API to the firmware to enable the app to do its thing. The new app is available here.
The main areas where we have extended the API are:
Log and parameters framework
The log framework is the preferred way for an app to read data from the firmware and this has been working from the start. Similarly the parameter framework is the way to set parameters. Even though this has worked, it broke a basic assumption in the setup with the client, that only the client can change a parameter. Changing a parameter from an app could lead to that the client and Crazyflie had different views of the state in the Crazyflie, but this has now been fixed and the client is updated when needed.
High level commander
The high level commander was not accessible from an app earlier and the functions in the python lib have been added to make it easy to handle autonomous flight.
Custom LED sequences
It is now possible to register custom LED sequences to control the four LEDs on the Crazyflie to signal events or state.
Lighthouse functionality
Functions for setting base station geometry data as well as calibration data have been added. These functions are also very useful for those who are using the lighthouse system as it now can be done from an app instead of modifying lighthouse_position_est.c.
Remaining work
We have taken a step forward with these changes but there is more to be done! The two main areas are support for custom CRTP packets and memory mapping through the memory sub system. There might be more, let us know if there is something you are missing. The work will continue and there might even be some documentation at some point :-)
Tutorial
One reason for doing this API work now was to prepare for the tutorial about the lighthouse 2 positioning system, swarm autonomy and the demo app that we will run this Wednesday on-line, don’t miss out! You can read more about the event here.