Modular robotics implies in general flexibility and versatility to robots. In theory, you could design a modular robot basically on the way you would want it to be, by simply adding or removing modules from the already existing robot. Changing the robot configuration by adding more individuals, generally increases the system redundancy, meaning that now, there are probably many different ways to achieve a specific goal. From a naive standard point of view, more modules could imply in practice more robustness due to this redundancy. In fact, it does get more robust by the cost of becoming more complex, and probably harder to control. Added to that, other issues may arise when you take into account that your modular robot is flying, and how physical properties and actuation scales as the number of modules grow.
In the GRASP Laboratory at the University of Pennsylvania, one of our focuses is to allow robots to achieve a specific task. In this work, we present ModQuad-DoF, which is a modular flying platform that enlarges the configuration space of modular flying structures based on quadrotors (crazyflies), by applying a new yaw actuation method that relies on the desired roll angles of each flying vehicle. This research project is coordinated by Professor Mark Yim , and led by Bruno Gabrich (PhD candidate).
Scaling Modular Robots
Scaling modular robots is a very challenging problem that usually limits the benefits of modularity. The sum of the performance metrics (speed, torque, precision etc.) from each module usually does not scale at the same rate as the conglomerate physical properties. In particular, for ModQuad, saturation from individual motors would increase as the structures became larger leading to failure and instability. When conglomerate systems scale up in the number of modules, the moment of inertia of the conglomerate often grows faster than the increase in thrust capability for each module. For example, the increase in the moment of inertia for a fifth module added to four modules in a line can be approximated by the mass of the module times half the distance to the center squared. This quadratic increase gives us the intuition that the required yaw actuation grows faster than the actuation authority.
Yaw Actuation
An inherit characteristic of quadrotors is to have their yaw controlled by the drag moments from each propeller. For ModQuad as more modules are docked together, a decreased controllability in yaw is noticed as the structure becomes larger. In a line configuration the structure’s inertia grows quadratically with the distance of each module to the structure center of mass. On the other hand the drag moments produced scales linearly with the number of modules.
The new yaw actuation method relies on the fact that each quadrotor is capable to generate an individual roll enabled by our new cage design. By working in coordinated manner, each crazyflie can then generate structure moments from moment arms provided by the propellers given its roll and its distance from the structure’s center of mass.
Cage Design
The Crazyflie 2.0 is the chosen platform to enable thrust and attitude to the individual modules. The flying vehicle measures 92×92×29 mm and weights 27 g while its battery lasts around 4 minutes for the novel design proposed. In this work the cage performs as pendulum relative to the flying vehicle. The quadrotor is joined to the cage through a one DOF joint. The cages are made of light-weight materials: ABS for the 3-D printed connectors and joints, and carbon fiber for the rods.
Although the flying vehicle does not necessarily share same orientation as the cage, the multiple connected cages do preserve same orientation relative to each other. With the purpose of allowing such behavior, we used Neodymium Iron Boron (NdFeB) magnets as passive actuators to enable rigid cage connections. Docking is only allowed at the back and front face of the modules, and each one of these faces contains four magnets. Those passive actuators have dimensions of 6.35 × 6.35 × 0.79 mm with a bonding force of 1 kg.
Structure Flying Performance
Conclusions
ModQuad-DoF is a flying modular robotic structure whose yaw actuation scales with increased numbers of modules. ModQuad-DoF has a one DOF jointed cage design and a novel control method for the flying structure. Our new yaw actuation method was validated conducting experiments for hovering conditions. We were able to perform two, four and, six modules cooperatively flying in a line with yaw controllability and reduced loss in thrust. In future work we aim to explore the structure controllability with more robots in a line configuration, and exploring different solutions for the desired roll angles. Possibly, with more modules in the structure, only a few would be required to roll in order to maintain a desired structure yaw. Given that, we could explore the control allocation for each module in a specific structure configuration, and dependent on its desired behavior. Further, structures that are not constrained to a line will also be tested using the basis of the controller proposed in this work.
It is apparently a recurrent theme within Bitcraze:New people come into the office, claim that the documentation is a bit of a mess, then will make it their personal mission on the company to try to fix it (because ‘how hard can it be?’) and come close to a mini depression when it turns out that it ain’t so easy at all.
And yes, I absolutely fell in into that trap too. During my PhD I did not really work on documentation like this (with the exception of papers) so I made quite ambitious plans last year as you can read in this blogpost. We managed to already cross a couple of things off: we moved wiki pages to the github and host it on our website and created datasheets for products, which should make it possible to close the wiki product pages.
However, we still haven not managed to completely close off the wiki because some pages can not really be split up or might have information on there that might not be very future proof. But there are definitely many matters to improve, so we are just writing some of our thoughts down.
Beginner – ? – Developer
One of the things that we noticed that is missing, also by comments of you guys on the forum or by mail, are the means to bring the crazyflie starters quickly to the developer phase. There are some tutorials to be found on our website, but the general feeling is that it does not elevate the general understanding of how everything works. Even the tutorials that cover the autonomous flight with a flowdeck does not go further than giving install instructions and handing over the full python script while not explaining which element does what.
Of course, there are already user manuals to be found in the github docs, however those are maybe too big of a step and take much for granted that the reader knows every ‘in between’ step. It would be much better, for any level, to have step-by-step guides on how to set thing up and what each element’s role is in the code. That would probably work much more effectively as a start for beginning developers.
So we had some tutorials in mind that can elevate first starters to come closer to the developer page:
CFCLIENT: How to working with the logging / parameter framework and the plotting tab
CFCLIENT: How to interpret the debug console output
CFLIB: How to connect to the Crazyflie and read out logs and parameters
CFLIB: How to send set points and the commander framework
CFLIB: How to build up the Multiranger push demo step by step
CF FIRMWARE: How to work with the Applayer (adding own modules or code)
If there are more tutorials that you would like to see, please let us know!
Doc closer to the code
The consensus here in general, is that we would like to have the documentation as close as possible to the doc. At least we have taken a step into the right direction by importing the docs into the Github Repos. This means that with every new feature added, the person responsible can add documentation to it directly in the same commit/pull request.
However, if the description is part of function’s or classes doc strings, it is as close as it can get! The contributor does not need to change the separate markdown file but can change the information directly. Moreover, it can also auto generate documentation for us, as you can see here from one of our try-outs with sphinx and our crazyflie-lib-python repo:
Part of the class and module overview of CFLIB with some auto doc of the high level commander.
Maybe for a beginner such documentation would not be great as a start, but for a more trained developer this could be very useful. My personal problem with most automatic generated documentation is that I find them difficult to read and find the functions that I need. However it would be possible to change the layout to make it a bit more readable since we will host it on our website. And since we mostly use C and Python in our repos, the most logical tools would be Doxygen and Sphinx. There are probably other possibilities out there, but if we would like to integrate this in our framework, we would like to go with tools that are future proof.
The whole picture
The problem with Autodoc is that it mostly shows the itty-bitty-gritty details of a library or firmware, however the users tend to get lost and can not see the whole picture. Also we are maintaining a lot of libraries and firmwares to consider (as you can see here in this list) based on which hardware they are applied for. This means that we have separate documentation pages on almost all of those.
And then comes the decision of where to place information. For instance, the CRTP (Crazy RealTime Protocol) is documented in the crazyflie firmware documentation, since there it is indeed how it is implemented, but CRTP does not only affect the crazyflie firmware. It goes from the STM32F4 to the NRF to the crazyradio through the USB on your computer through the cflib which is the backbone of the CFclient. This is an topic that users would like to have to an overview from if they would like to develop something with the CRTP.
Step-by-step guides are maybe still too detailed to explain the whole picture so maybe we should have some other way to have this overview shown. Maybe by an online lecture or a more lesson type of medium?
There is a lot of sources out there (like write the doc) that have tips on how to maintain the information sources for users, but of course we need to have a documentation structure that is useful and readable for many types of users and maintainable from our side. Let us know if you want to share any insight from your own experiences!
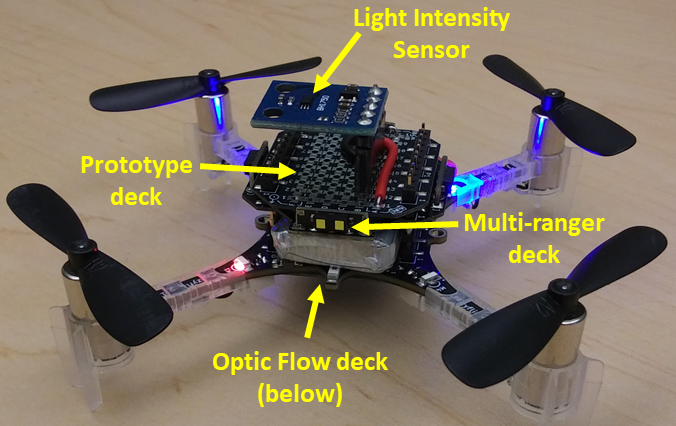
Our team’s Crazyflie quadcopter was equipped with Bitcraze’s Optic Flow deck and Multi-ranger deck. A BH-1750 light intensity sensor was soldered to a Bitcraze Prototype deck to complete our hardware.
The Crazyflie 2.1 was the perfect robotics platform for an introduction to autonomous robotics at the University of Washington winter quarter 2020. Our Bio-inspired Robotics graduate course completed a series of Crazyflie projects throughout the 10 weeks that built our skills in:
Python
Robot Operating System (ROS)
assembling custom sensors
writing new drivers
designing and testing control algorithms
trouble shooting and independent learning
The course was offered by UW Mechanical Engineering’s Autonomous Insect Robotics Laboratory, headed by Dr. Sawyer B. Fuller. The course was supported by PhD candidate Melanie Anderson, who has done fantastic research with her Crazyflie-based Smellicopter. The final project was an opportunity to turn a Crazyflie quadcopter into a bio-inspired autonomous robot. Our three person team of UW robotics grad students included Nishant Elkunchwar, Krishna Balasubramanian, and Jessica Noe.
Light Seeking Run-and-Tumble Algorithm Inspired by Bacterial Chemotaxis
The goal for our team’s Crazyflie was to seek and identify a light source. We chose a run-and-tumble algorithm inspired by bacterial chemotaxis. For a quick explanation of bacterial chemotaxis, please see Andrea Schmidt’s explanation of chemotaxis on Dr. Mehran Kardar’s MIT teaching page. She provides a helpful animation here.
In both bacterial chemotaxis and our run-and-tumble algorithm, there is a body (the bacteria or the robot) that can:
move under its own power.
detect the magnitude of something in the environment (e.g. chemical put off by a food source or light intensity).
determine whether the magnitude is greater or less than it was a short time before.
This method works best if the environment contains a strong gradient from low concentration to high concentration that the bacteria or robot can follow towards a high concentration source.
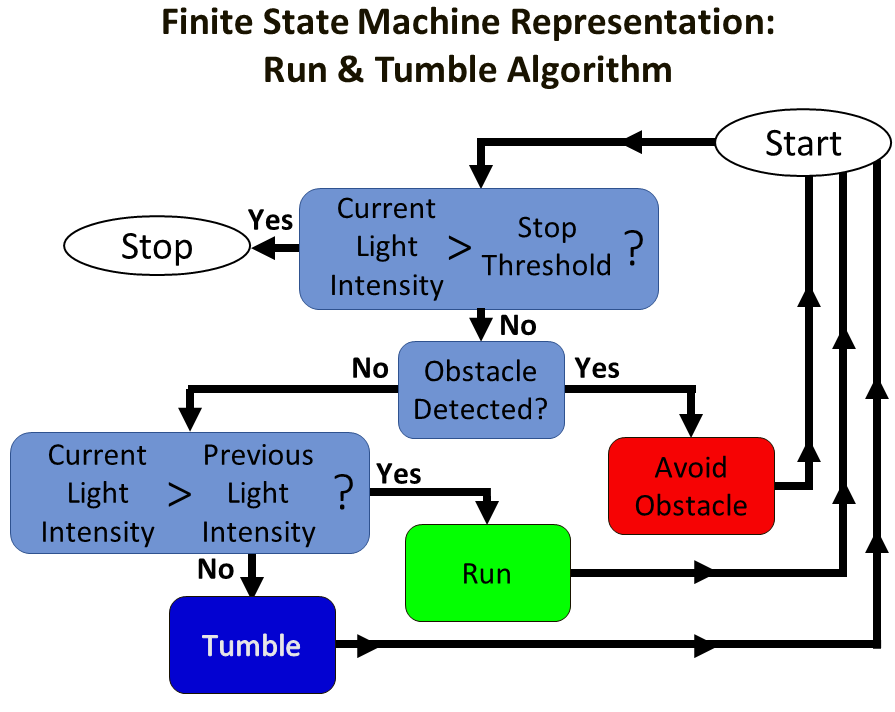
The details of the run-and-tumble algorithm are shown in a finite state machine diagram below. The simple summary is that the Crazyflie takes off, begins moving forward, and if the light intensity is getting larger it continues to “Run” in the same direction. If the light intensity is getting smaller, it will “Tumble” to a random direction. Additional layers of decision making are included to determine if the Crazyflie must “Avoid Obstacle”, or if the source has been reached and the Crazyflie quadcopter should “Stop”.
The run-and-tumble algorithm represented as a finite state machine.
Crazyflie Hardware
To implement the run-and-tumble algorithm autonomously on the Crazyflie, we needed a Crazyflie quadcopter and these additional sensors:
Bitcraze Prototype deck with BH-1750 light intensity sensor
The Optic Flow deck was a key sensor in achieving autonomous flight. This sensor package determines the Crazyflie’s height above the surface and tracks its horizontal motion from the starting position along the x-direction and y-direction coordinates. With the Optic Flow installed, the Crazyflie is capable of autonomously maintaining a constant height above the surface. It can also move forward, back, left, and right a set distance or at a set speed. Several other pre-programmed movement behaviors can also be chosen. This Bitcraze blog post has more information on how the Flow deck works and this post by Chuan-en Lin on Nanonets.com provides more in-depth information if you would like to read more.
The Bitcraze Multi-ranger deck provided the sensor data for obstacle avoidance. The Multi-ranger detects the distance from the Crazyflie to the nearest object in five directions: forward, backward, right, left, and above. Our threshold to trigger the “Avoid Obstacle” behavior is detecting an obstacle within 0.5 meters of the Crazyflie quadcopter.
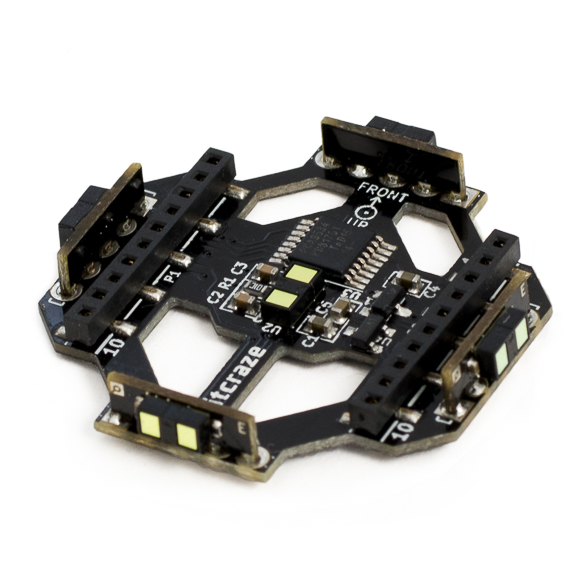
The Prototype deck was a quick, simple way to connect the BH-1750 light intensity sensor to the pins of the Crazyflie to physically integrate the sensor with the quadcopter hardware. This diagram shows how the header positions connect to the rows of pads in the center of the deck. We soldered a header into the center of the deck, then soldered connections between the pads to form continuous connections from our header pin to the correct Crazyflie header pin on the left or right edges of the Prototype deck. The Bitcraze Wiki provides a pin map for the Crazyflie quadcopter and information about the power supply pins. A nice overview of the BH-1750 sensor is found on Components101.com, this shows the pin map and the 4.7 kOhm pull-up resistor that needs to be placed on the I2C line.
It was easy to connect the decks to the Crazyflie because Bitcraze clearly marks “Front”, “Up” and “Down” to help you orient each deck relative to the Crazyflie. See the Bitcraze documentation on expansion decks for more details. Once the decks are properly attached, the Crazyflie can automatically detect that the Flow and Multi-Ranger decks are installed, and all of the built-in functions related to these decks are immediately available for use without reflashing the Crazyflie with updated firmware. (We appreciated this awesome feature!)
Crazyflie Firmware and ROS Control Software
Bitcraze provides a downloadable virtual machine (VM) to help users quickly start developing their own code for the Crazyflie. Our team used a VM that was modified by UW graduate students Melanie Anderson and Joseph Sullivan to make it easier to write ROS control code in the Python coding language to control one or more Crazyflie quadcopters. This was helpful to our team because we were all familiar with Python from previous work. The standard Bitcraze VM is available on Bitcraze’s Github page. The Modified VM constructed by Joseph and Melanie is available through Melanie’s Github page. Available on Joseph’s Github page is the “rospy_crazyflie” code that can be combined with existing installs of ROS and Bitcraze’s Python API if users do not want to use the VM options.
“crazyflie-firmware” – a set of files written in C that can be uploaded to the Crazyflie quadcopter to overwrite the default firmware
In the Bitcraze VM, this folder is located at “/home/bitcraze/projects/crazyflie-firmware”
In the Modified VM, this folder is located at “Home/crazyflie-firmware”
“crazyflie-lib-python” (in the Bitcraze VM) or “rospy_crazyflie” (in the Modified VM) – a set of ROS files that allows high-level control of the quadcopter’s actions
In the Bitcraze VM, “crazyflie-lib-python” is located at “/home/bitcraze/projects/crazyflie-lib-python”
In the Modified VM, navigate to “Home/catkin_ws/src” which contains two main sets of files:
“Home/catkin_ws/src/crazyflie-lib-python” – a copy of the Bitcraze “crazyflie-lib-python”
“Home/catkin_ws/src/rospy_crazyflie” – the modified version of “crazyflie-lib-python” that includes additional ROS and Python functionality, and example scripts created by Joseph and Melanie
In the Modified VM, we edited the “crazyflie-firmware” files to include code for our light intensity sensor, and we edited “rospy-crazyflie” to add functions to the ROS software that runs on the Crazyflie. Having the VM environment saved our team a huge amount of time and frustration – we did not have to download a basic virtual machine, then update software versions, find libraries, and track down fixes for incompatible software. We could just start writing new code for the Crazyflie.
The Modified VM for the Crazyflie takes advantage of the Robot Operating System (ROS) architecture. The example script provided within the Modified VM helped us quickly become familiar with basic ROS concepts like nodes, topics, message types, publishing, and subscribing. We were able to understand and write our own nodes that published information to different topics and write nodes that subscribed to the topics to receive and use the information to control the Crazyflie.
A major challenge of our project was writing a new driver that could be added to the Crazyflie firmware to tell the Crazyflie system that we had connected an additional sensor to the Crazyflie’s I2C bus. Our team referenced open-source Arduino drivers to understand how the BH-1750 connects to an Arduino I2C bus. We also looked at the open-source drivers written by Bitcraze for the Multi-ranger deck to see how it connects to the Crazyflie I2C bus. By looking at all of these open-source examples and studying how to use I2C communication protocols, our team member Nishant Elkunchwar was able to write a driver that allowed the Crazyflie to recognize the BH-1750 signal and convert it to a sensor value to be used within the Crazyflie’s ROS-based operating system. That driver is available on Nishant’s Github. The driver needed to be placed into the appropriate folder: “…\crazyflie-firmware\src\deck\drivers\src”.
The second change to the crazyflie-firmware is to add a “config.mk” file in the folder “…\crazyflie-firmware\tools\make”. Information about the “config.mk” file is available in the Bitcraze documentation on configuring the build.
The final change to the crazyflie-firmware is to update the make file “MakeFile” in the location “…\crazyflie-firmware”. The “MakeFile” changes include adding one line to the section “# Deck API” and two lines to the section “# Decks”. Information about compiling the MakeFile is available in the Bitcraze documentation about flashing the quadcopter.
Making additions to the ROS control architecture
The ROS control architecture includes messages. We needed to define 3 new types of messages for our new ROS control files. In the folder “…\catkin_ws\src\rospy_crazyflie\msg\msg” we added one file for each new message type. We also updated “CMakeLists.txt” to add the name of our message files in the section “add_message_files( )”.
The second part of our ROS control was a set of scripts written in Python. These included our run-and-tumble algorithm control code, publisher scripts, and a plotter script. These are all available in the project’s Github.
Characterizing the Light Sensor
At this point, the light intensity sensor was successfully integrated into the Crazyflie quadcopter. The new code was written and the Crazyflie quadcopter was reflashed with new firmware. We had completed our initial trouble shooting and the next step was to characterize the light intensity in our experimental setup.
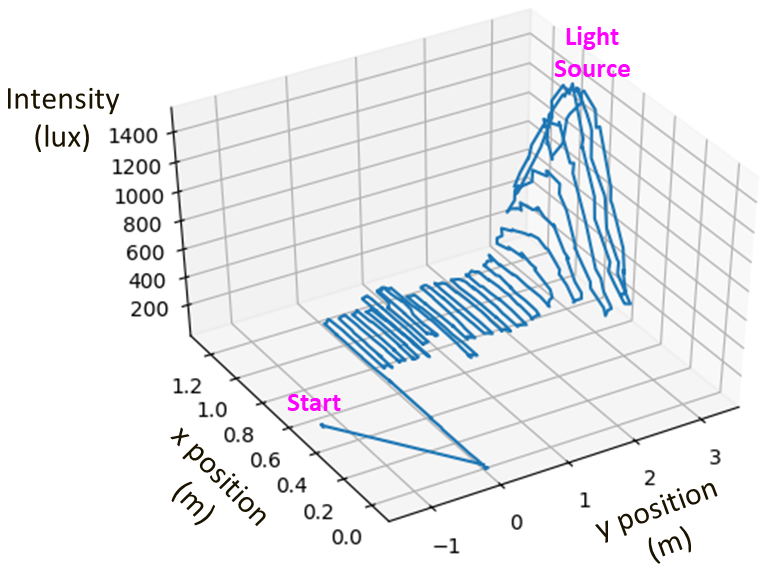
Experimental setup for light intensity characterization.
This characterization was done by flying the Crazyflie at a fixed distance above the floor in tightly spaced rows along the x and y horizontal directions. The resulting plot (below) shows that the light intensity increases exponentially as the Crazyflie moves towards the light source.
The light characterization allowed us to determine an intensity threshold that will only happen near the light source. If this threshold is met, the algorithm’s “Stop” action is triggered, and the Crazyflie lands.
Light intensity (units of lux) was experimentally characterized by piloting the Crazyflie in a linear pattern at a constant height above the ground. The resulting plot shows that light intensity is characterized by an exponential roll off in both the x and y directions.
Testing the Run-and-Tumble Algorithm
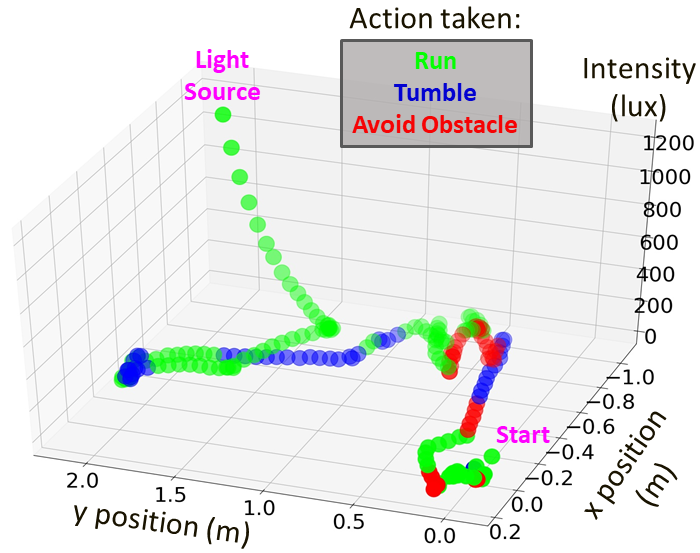
With the light intensity characterization complete, we were able to test and revise our run-and-tumble algorithm. At each loop of the algorithm, one of the four actions is chosen: “Run”, “Tumble”, “Avoid Obstacle”, or “Stop”. The plot below shows a typical path with the action that was taken at each loop iteration.
Flight Tests of the Run-and-Tumble Algorithm
In final testing, we performed 4 trial runs with 100% success locating the light source. Our test area was approximately 100 square feet, included 1 light source, and 2 obstacles. The average search time was 1:41 seconds.
The “Avoid Obstacle” and “Run” behavior are demonstrated in the above video clip (1.5x actual speed).
The “Run” and “Tumble” actions are demonstrated in the above video clip (2x actual speed). At the end, the “Stop” action is demonstrated when the light intensity reaches the threshold value of 800 lux, indicating that the Crazyflie has found the light source and should land.
Lessons Learned
This was one of the best courses I’ve taken at the University of Washington. It was one of the first classes where a robot could be incorporated, and playing with the Crazyflie was pure fun. Another positive aspect was that the course had the feel of a boot camp for learning how to build, control, test, and improve autonomous robots. This was only possible because Bitcraze’s small, indoor quadcopter with optic flow capability made it possible to safely operate several quadcopters simultaneously in our small classroom as we learned.
This development project was really interesting (aka difficult…) and we went down a few rabbit holes as we tried to level up our knowledge and skills. Our prior experience with Python helped us read the custom example scripts provided in our course for the ROS control program, but we had quite a bit to learn about the ROS architecture before we could write our own control scripts.
Nishant made an extensive study of I2C protocols as he wrote the new driver for the BH-1750 sensor. One of the biggest lessons I learned in this project was that writing drivers to integrate a sensor to a microcontroller is hard. By contrast, using the Bitcraze decks was so easy it almost felt like cheating. (In the nicest way!)
On the hardware side, the one big problem we encountered during development was accidentally breaking the 0.5 mm headers on the Crazyflie quadcopter and the decks. The male headers were not long enough to extend from the Flow deck all the way up through the Prototype deck at the top, so we tried to solder extensions onto the pins. Unfortunately, I did not check the Bitcraze pin width and I just soldered on the pins we all had in our tool kits: the 0.1 inch (2.54 mm) wide pins that we use with our Arduinos and BeagleBones. These too-large-pins damaged the female headers on the decks, and we lost connectivity on those pins. Fortunately, we were able to repair our decks by soldering on replacement female headers from the Bitcraze store. I wish now that the long pin headers were available back then.
In summary, this course was an inspiring experience and helped our team learn a lot in a very short time. After ten weeks working with the Crazyflie, I can strongly recommend the Crazyflie for robotics classes and boot camps.
It has been a few months of when the Covid-19 crisis started, but it feels like almost a year ago when we all decided to stay and work from home. Considering circumstances, we managed to do to handle ourselves pretty well. We set up our home labs in our kitchens and/or living-rooms and managed to do a lot of development. Even though this situation did not come easy as you can see from our experiences here, we were able to pull ourselves through it in one peace. Now we also have to consider that Covid-19 is here to stay and we need to deal with the complications until at least the vaccine is finished and distributed. Until then, we might have to think about alternatives on how we do things, including how we go to events and meet/talk to you all!
Every year we try to go to at least two conferences, with last year being a particular busy year of us going to three big events (ICRA 2019, IMAV 2019 and IROS 2019). Before going to those conferences, we usually try to crunch and make an awesome demo. This also enables us to add new features to the firmware or fix problems that we find during this crunch. Moreover, we also really like to meet our users face-to-face, so that we can hear about how you use the Crazyflie in your research or classroom!
Since going to conferences and in-person events will be difficult to do this year and maybe the next, we were thinking about events that we can possibly organize to as an alternative. We were thinking about a couple of options on which we would like your opinion on as well. For instance, we could do an remote tutorial or lecture, like we did here for EPFL. Or maybe we can organize an online seminar we were invite users to give a talk about their work (I personally took part in a VR seminar in Mozilla hubs, which was pretty awesome). We can also consider to invite users for an online meetup to talk about the direction of the Crazyflie and its firmware. Another idea that we had recently, is to organize an online Crazyflie competition, where users can control the Crazyflie remotely or upload custom firmware, so that it can fly autonomously through an obstacle field.
We set up a poll of these ideas, so we can know what you guys like best! Also please comment below if you have further ideas about this or start a thread on the forum!
The summer has reached Sweden but this summer is not an ordinary summer. Coming from a pandemic spring, and not really knowing what the world is going to be like next, is not a situation we are used to. The covid situation in Sweden is looking a lot better now but we still have to be cautious and travel around as little as possible. That mean we will have a “homecation” or “hemester” as we say in Swedish.
We will recharge our batteries and get new inspiration and will try to embrace the “homecation”. During this time the pace at the Bitcraze office will be a bit slower but we will continue to ship products, answer emails, help you in the forum etc as usual all summer. The remaining time will be spent mainly on cleaning up as we normally do during summer. This includes bug fixing, documentation improvements, finishing small things that never gets done, etc. To summarize, improvements in general.
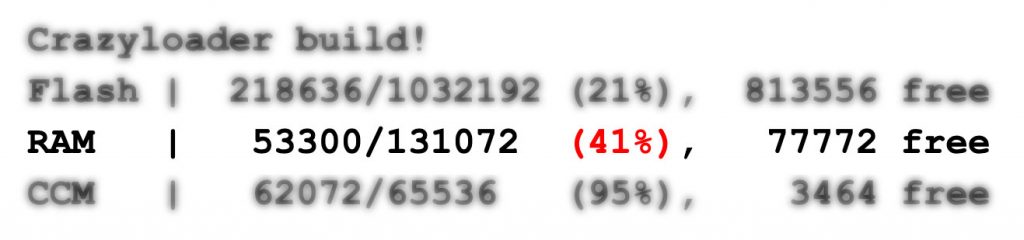
The major event of this release is the use of the Core Coupled Memory in the Crazyflie. The CCM is a 64k RAM memory bank and by moving memory blocks from the standar RAM to the CCM, we have freed up 64k of RAM! The 128k of RAM was almost full so an extra 50% is good news.
One might ask why this has not been done earlier and the answer is that the CCM has some special properties that has to be taken into account. It is RAM, just like the “normal” RAM, but it is connected to a different internal bus in the STM MCU. The most notable difference is that it can not be used in DMA operations that are commonly used when accessing sensors, and if a pointer to CCM memory is passed to a sensor driver things will go bad. To make it clear where the memory is located, we have introduced a macro to be used when explicitly moving a memory area to the CCM, otherwise it will end up in normal RAM.
Hopefully the chosen design will have very little impact on the “normal” firmware programmer. We have moved a bunch of memory blocks to the CCM that are “safe”, and most programmers can happily forget about the CCM and just enjoy the new 64k of available RAM!
Battery temperature
In release 2020.02 we introduces a battery temperature check do not charge the battery if it is too warm. Lithium batteries likes to be charged within 0-45 deg Celsius. To do this we used the temp sensor within the nRF51822 which is mounted just under the battery. It hover turned out that the temp measurement is way to biased and as a result stops charging to early. So in this release we did more measurements and increased the allowed charging range.
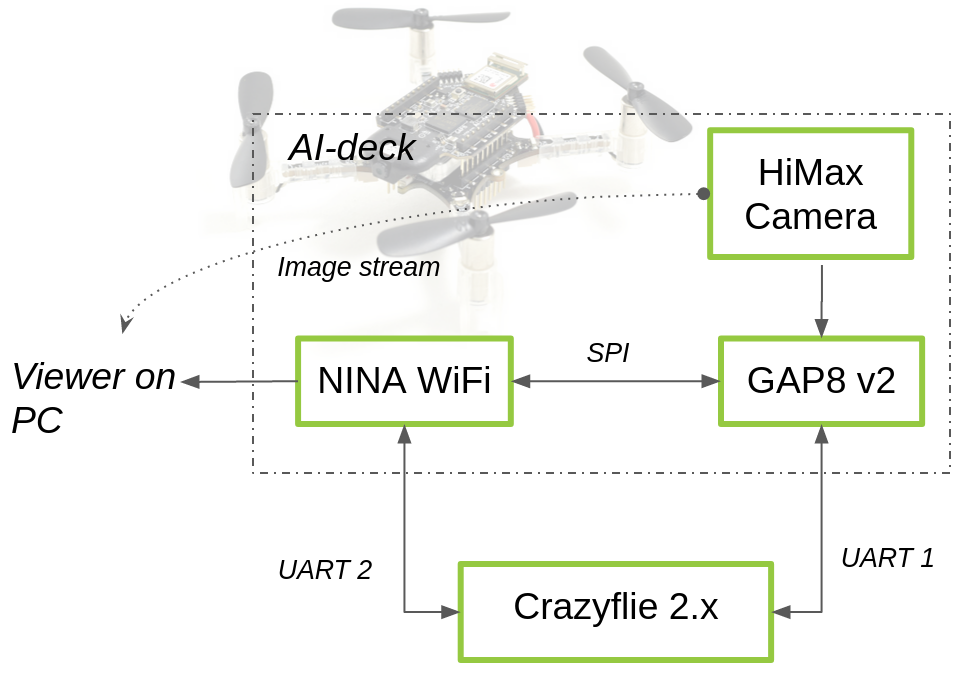
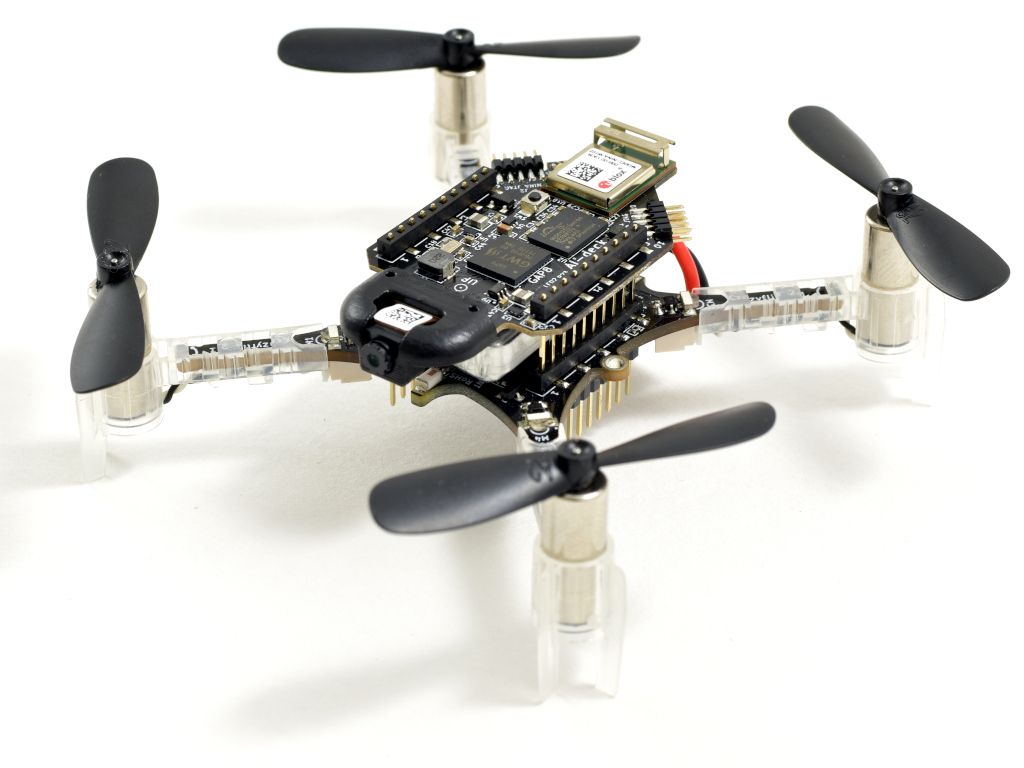
The AI-deck is now available in our online store! Super-edge-computing is now possible on your Crazyflie thanks to the GAP8 IoT application processor from GreenWaves Technologies. GAP8 delivers over 10 GOPS of compute power at exceptionally low power consumption enabling complex tasks such as path-finding and target following on the Crazyflie, consuming less than 0,1% of the total energy.
The AI-deck can host artificial intelligence-based workloads like Convolutional Neural Networks onboard. This will open up many research areas focusing on fully onboard autonomous navigation of tiny MAVs, like ETH Zurich’s PULP-Dronet. Moreover, there is also ESP32 WiFi connectivity with the possibility to stream the images to your personal computer.
We are happy that we managed to get everything ready so soon after our last update. Crazyflie AI-deck is in early access, which means the hardware design is now finalized and full support for building, running and debugging applications (including GreenWaves’ GAPflow tools for porting neural networks to GAP from TensorFlow) is available, however, limited examples of specific AI-deck applications have been developed so far. Read more about early access here. Even though there is still some work to be done, there are already some examples you can try out which we will explain in this blog post. Also, we aim to have all AI-decks pre-flashed with the WiFi streamer example so that you check out right away if your AI-deck is working.
Beware that you need an JTAG-enabled programmer/debugger in order to develop for the AI-deck!
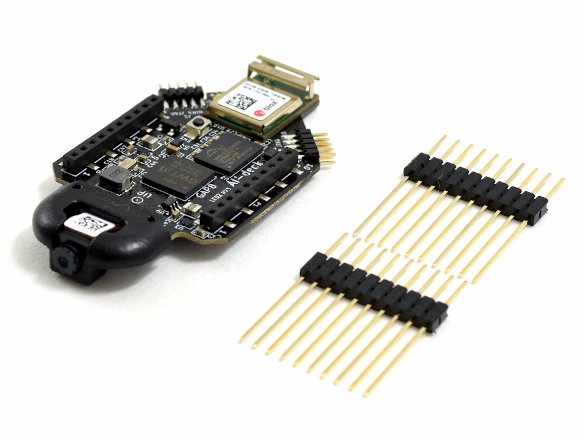
Technical specifications
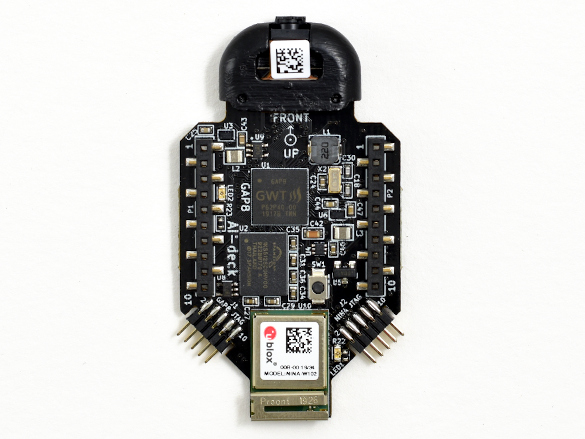
The AI-deck will come with two elongated male pin-headers, which enables the user to connect it to the Crazyflie with an additional deck. There are two 10 pin JTAG connectors soldered which enables connection with a JTAG-enabled programmer. This will be the main way to program the GAP8 chip and the ESP-based NINA module while it is still in early access.
Getting started
When you first receive your AI-deck, it should be flashed with a WiFi streamer example of the camera image stream. Once the AI-deck is powered up by the Crazyflie, it will automatically create a hotspot called ‘Bitcraze AI-deck Example’. In this repo in the folder named ‘NINA’ you will find a file called viewer.py. If you run this with python (preferably version 3), you will be able to see the camera image stream on your computer. This will confirm that your AI-deck is working.
Next step is to go to the docs folder of the AI-deck examples repository. Try out the WiFi demo and set up your development program with the getting-started guide. This guide contains links to the GAP-SDK documentation from GreenWaves Technologies. You can read more about the face detector example that we demonstrated in this blog post.
It’s been more than 2 months since we decided, to preserve our health and the Swedish health care system, to work from home. Since then, the majority of the world has had to do the same, and as all of you, we had struggled to adjust to this new situation. What’s it like behind the curtain ?
The home setting
First things first: I’m not from the tech side of the company. Setting up my working environment was not difficult. I have my laptop, I plug it, and boom, I’m ready to work. I know that some of my colleagues had to get creative, setting up base stations in their summer house or in their kitchens.
My main problem setting up was dealing with comfort and distractions. Comfort means finding a good chair, and resist the temptation to just slouch on the couch – let’s be honest, maximum productivity is not achieved when the remote control is one arm’s length away.
Dealing with distractions is a whole another problem. My husband works remotely too. We’ve learned quite quickly that we can’t both work in the living room: collisions of video calls, or simply resisting the urge to chitchat together made it impossible. But the one major distraction that was impossible to ignore is 20 month-old and full of youthful energy. In Sweden, preschools are not closed, but every cold symptoms mean staying at home. It is perfectly reasonable, but we soon realized that having a toddler nearby is incompatible with working peacefully. As many parents have learned during the last couple of months, kids are a great way to lose your train of thoughts, to disrupt a video-call with inappropriate sentences or to simply disrupt any plan. As fun as it was to see how our daughter deal with the “no banging on the room’s door when mommy is working” rule, I feel incredibly lucky that we have a big enough apartment to be able to work in a separate room, and of course that she was able to have fun at the daycare while we could work from home.
A new routine
I have to say that I’m quite proud with the way we settled into this new routine. We meet each morning, setting up the goals of the day. We did that at the office too (see here), but where it lasted 10 minutes when we were all together all day, it can easily climb up to 45 minutes now. We tried to use new tools, and whether those worked or not (if you can tip on a good virtual whiteboard we’ll appreciate it!), in those two months we had time to experiment new ways of working. We tried to set up a quarterly meeting, (meaning a whole day of meeting) without a good quality webcam.. And managed it!
As the days turned into weeks, we realized that one big problem with our new setup meant that each day looked the same. This Groundhog day feeling made us lost count on our 3-week cycle and left the weekends with a strange, unsatisfying aftertaste. After all, now that I’m all the time at home, what’s the difference between a workday and a Saturday ? Well, I haven’t figure out a good solution yet.
It’s not all bad, though. I like that my new routine includes a big, often home-cooked lunch with my husband (I’m French, so of course my first thought is towards cooking !). And after the first weeks of minor stumble, the Bitcraze team is as productive as ever, with some exciting things coming soon. I have to admit too that I got used to listening to my own music while working, or that reducing the commute has allowed for some much appreciated 30 extra minutes of sleep.
And, last but not least, with the warm days returning, I started taking my laptop near the sunlit window, allowing for a great bask in the sun – what I often need to gather up energy.
My perfect spot near the window
Away but together
Each one of us had his struggle with remote work. For me, who has just started in the company, it was an unexpected challenge. I still have a lot of things to learn, and it’s easier when I can just tap on someone’s shoulder or quietly observe what they’re doing. Instead, I had to figure out quickly how to do things on my own. It meant making some mistakes, but eventually I’m convinced I’m now more efficient than if I had more relied on my colleagues – learning things the hard way is sometimes the best way.
If you are working from home too, you’ll understand when I say that the hardest part has been to keep up the motivation. At Bitcraze, we’re a tight-knit group, and I never realized before how much I rely on social interactions to keep me going. I’m a social animal, and my coworkers are always one of the most important part of my work. Helping them, seeing how they’re doing, sharing a ‘fika’ (Swedish coffeebreak) … I had no idea it was such a big chunk of my workplace well-being.
Thankfully, we’re now a digital tight-knit group. We have daily digital fikas to keep up with each other’s progress, and even though we could be more thorough with them, it helped with the loneliness.
As I noticed my motivation went usually down after my home-cooked lunch, a new resolution came forth: after lunch, exercise ! A great way to keep in shape and to resist the temptation of a quick nap. I’ll indeed gingerly admit that, with a comfy bed so close, it’s hard to not think about closing my eyes, just for one second… Getting the body moving and the heart rate up is the best solution I’ve found to avoid this trap, with the added benefit of not gaining too much weight during this strange period.
We also started having picnics when the weather allowed it. Respecting social distancing (each on its own blanket), it is a great way to reconnect, share a meal in the sun, and appreciate the great parks of Malmö.
A Bitcraze picnic
All in all, I’ve learned a lot during these months working from home. We’ve managed to tackle the hurdles in our way and found our stride with this new routine. Improvisation, creativity and adaptation were necessary, but I’m happy to report we didn’t lose our motivation and will to create great product !
New stock
Speaking of great products, we have renewed our stocks that were beginning to thin a little. The buzzer decks, for example, are back in stock !
It has been a while since we have updated you all on the AI deck. The last full blogpost was in October, with some small updates here and there. It is not that we have not focused on it at all; on the contrary… this has been a high priority project for a while now. It is just quite a complex board with a lot of bells and whistles, which can be challenging to work with sometimes so early in development, something that our previous intern can definitely agree on. So therefore we rather wanted to wait until we were able to make sufficient progress before we gave you an update… and so we have!
A Crazyflie 2.1 with the AI deck
Together with Greenwaves technologies we have been trying to get the SDK of the GAP8 chip on the AI deck stable enough for an early release. The latest release of the SDK (version 3.4) has proved itself to work with relative ease on the AI deck after extensive testing. Currently it is possible to use OpenOCD for flashing and debugging, and it supports most commonly available debuggers with a jtag connector. In the upcoming weeks both of Bitcraze and Greenwaves will test and try out all examples of the SDK on the AI deck to make sure that everything is still compatible. Also the documentation will be extended as well. As there is so much to document, it might be difficult to catch all of it. However, if you notify us and Greenwaves on anything that is missing once the AIdeck is out, that will help us out to catch the knowledge gaps.
The AI deck also contains the ESP-basedNINA module for establishing a WiFi connection. This enables the users to stream the video stream of the AI deck onto their computers, which will be quite an essential tool if they would like to generate their own image database for training the CNNs for the GAP8 (and it happens to also be quite practical for debugging by the way!). Currently it is required to set credentials of your local WiFi network and reflash the AI-deck to be able to connect and streaming the images, but we are working on turning the Nina into an access-point instead so no reflashing would be required. We hope that we will be able to implement this before the release.
Top view of the AI deck
We are also trying out to adjust applications to make suitable of the AI deck. For instance, we have adapted Greenwaves’ face-detector example to use the image streamer instead of the display available on the GAPuino boards. You can see a video of the result here underneath. Beware that this face-detector is not based on a CNN but on HOG descriptors, so it only works in good conditions where the face is well lit. However, it is possible to train a CNN to detect faces in Tensorflow and flash this on the AI deck with the GAPflow framework as developed by Greenwaves. At Bitcraze we haven’t managed to try that out ourselves ( we are close to that though!) but at least this example is a nice demonstration of the AI deck’s abilities together with the WiFi-streamer. This example and more testing code can be found in our experimental repo here. For examples of GAPflow, please check out the examples/NNtool section of the GAP8 SDK.
For some reason WordPress has difficulty embedding the video that was supposed to be here, so please check https://youtu.be/0sHh2V6Cq-Q
Seeing how the development has been progressing, we will be comfortable to say that the AI deck could be ready for early release somewhere in the next month, so please keep an eye out on our website! We will continue to test the GAP SDK’s stability and we are very thankful for Greenwaves Technologies with their help so far. We will also work on getting-started guides in order to get acquainted with the AI deck, supplementing the already existing documentation about the GAP8 chip.
Even-though the AI deck will soon be ready for early release, this piece of hardware is not for the faint-hearted and embedded programming experience is a must. But keep in mind that the possibilities with the AI deck are huge, as it will be mean that super-edge-computing on a 30 gram flying platform will be available for anyone. It will all be worth it when you have your Crazyflie flying autonomously while being able to recognize its surroundings :)
For the users that have subscribed to our github repository this does not come as an surprise, but for the rest, we have released a new version of our Crazyflie firmware (both STM and NRF) last week!
We know that it is quite close to our last release in February, but we had so many changes and contribution that we deemed it necessary to add a stamp to this current version. In this blog-post, we will give an overview on which features to expect in this update.
UART communication
With courtesy of Saarland University, it is now possible to connect the Crazyflie through its UART to a port on your raspberry pi or through an FTDI cable directly to your computer. This is an extra port for communicating with CRTP will open up new possibilities to interact with your crazyflie.
This is compatible with CFlib version 0.1.10, however there was a fix implemented in the current master (see the ticket here). Please see the ticket for the UART communication here if you are interested in the implementation details.
Lighthouse
It is now possible to get the lighthouse geometry (the position and orientation of the base stations) without SteamVR. We made a script based on the latest stable release of openCV, to calculate the base station geometry based on the received sweep angles on the lighthouse deck. Check these full instructions on how to use this new script. It is a very new and fresh implementation, so if you are experiencing any trouble, please leave an issue on this page or leave a comment on the forum.
Also, FPGA v4 is now integrated in 2020.04, which support Basestation v2. This is still in a very early phase and not yet fully integrated in the firmware, so please keep an eye on this ticket for the implementation process in the latest master of the crazyflie-firmware. There was also a blogpost a few weeks ago about the current state of the lighthouse v2 development.
Bluetooth management
We also provided an update of the bluetooth management of the Crazyflie communication by the NRF chip. Before, it was (unintentionally) possible to connect to the Crazyflie over Bluetooth while it also connected to the CFclient through the crazyradio PA. This caused a lot of unwanted elements such as package loss and unresponsiveness. Now, whenever a Crazyradio packet has been received, Bluetooth will automatically be disabled. The same goes for the peer-2-peer packet, so the NRF firmware no longer needs to be flashed without Bluetooth support. The Crazyflie needs to be restarted after connecting through the CF dongle or P2P in order to connect to it again with the Crazyflie mobile app.
General fixes and improvements
Here are the general fixes and improvements listed that has been fixed in release v2020.04:
BMI088 (IMU of the CF2.1) has an self-test now.
Fixed memory issue with the Micro SD card deck.
High-level commander improvements.
Documentation improvements.
LPS TDoA (2 and 3) improvements.
See the release notes of the crazyflie-firmware and crazyflie-nrf-firmware to see the full list of improvements and issues that were fixed in 2020.04. The zip files for the firmware for both the roadrunner (tag) and crazyflie (cf2) can be found here.