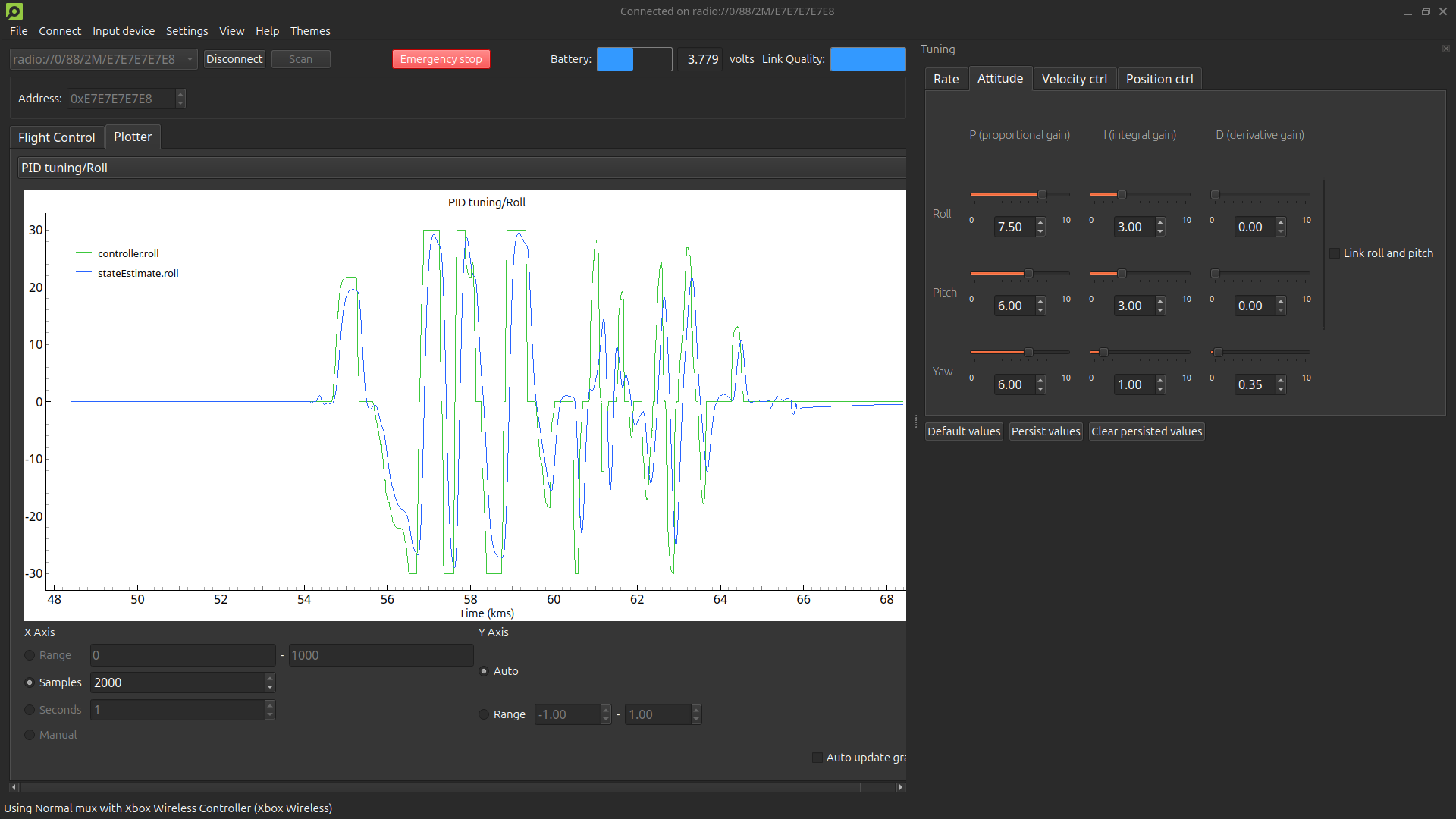
We are excited to announce the release of our new PID Tuning Guide! This guide is designed to help users understand and apply the basics of PID tuning within our ecosystem, making it easier to achieve stable and responsive flight for your Crazyflie. This guide is particularly useful if you’ve modified your drone, such as adding expansion decks or changing its motor and/or propeller configuration. While our default tuning is designed to work in a wide range of situations and configurations, fine-tuning your PID settings can enhance performance for your specific setup and flight profile.
Interface with tuning toolbox and plotter displaying the roll angle setpoint and the roll angle state estimate.
What’s in the guide?
The guide covers essential topics, including:
Fundamental PID Concepts: Understand the role of Proportional, Integral, and Derivative parameters in controlling your Crazyflie’s movements.
Step-by-Step Instructions: Learn how to set up your software, and use cfclient for tuning.
Practical Tuning Tips: Get insights on adjusting PID gains, using the tuning toolbox, and conducting safe manual flight tests.
Why this guide is useful
Even though this guide focuses on the basics, it provides a solid foundation for anyone new to PID tuning. Whether you’re using the Crazyflie 2.1, Crazyflie 2.0, or a custom-built quadcopter with the Crazyflie Bolt, this guide will help you:
Understand how PID controllers work and why they are important.
Use the cfclient for PID tuning within our ecosystem.
Safety first
We prioritize safety in our guide. Always secure your quadcopter in a safe environment, use protective gear, and configure an emergency stop on your controller to ensure a safe tuning process.
Get started with PID tuning today!
Ready to improve your quadcopter’s flight performance? Check out our PID Tuning Guide and start tuning.
This week, we have a guest blog post from Scott at Droneblocks.
DroneBlocks is a cutting-edge platform that has transformed how educators worldwide enrich STEM programming in their classrooms. As pioneers in the EdTech space, DroneBlocks wrote the playbook on integrating drone technology into STEM curriculum for elementary, middle, and high schools, offering unparalleled resources for teaching everything from computer science to creative arts. What started as free block coding software and video tutorials has become a comprehensive suite of drone and robotics educational solutions. The Block-Coding software still remains free to all, as the DroneBlocks mission has always been to empower educators and students, allowing them to explore and lead the way. This open-source attitude set DroneBlocks on a mission to find the world’s best and most accessible micro-drone for education, and they found it in Sweden!
Previously, DroneBlocks had worked alongside drone juggernaut DJI and their Tello Drone. The Tello was a great tool for its time, but when DJI decided to discontinue it with little input from its partners and users, it made the break much easier. The hunt began for a DJI Tello replacement and an upgrade!
Bitcraze’s choice to build Crazyflie as an open platform had their drone buzzing wherever there was curiosity. The Crazyflie was developed to fly indoors, swarm, and be mechanically simplistic. DroneBlocks established that the ideal classroom micro-drone required similar characteristics. This micro-drone needed to be small for safety but sturdy for durability. It also needed to be easy to assemble and simple in structure for students new to drones. Most importantly, the ideal drone needed to have an open line of software communication to be fully programmable. Finally, there had to be an opportunity for a long-lasting partnership with the drone manufacturer, including government compliance.
After extensive searching and testing by DroneBlocks, the Crazyflie was a diamond in the rough – bite-sized and lightweight, supremely agile and accurate, reliable and robust, and most importantly, it was an open-source development platform. The DroneBlocks development team took the Crazyflie for a spin (or several) and with excitement, it was shared with the larger curriculum team to be mined for learning potential. It was promising to see Crazyflie’s involvement in university-level research studies, which proved it meant business. DroneBlocks knew the Crazyflie had a lot going for it – on its own. The team imagined how, when paired with DroneBlocks’ Block Coding software, Flight Simulator, and Curriculum Specialists, the Crazyflie could soar to atmospheric heights!
Hardware? Check. Software? Check. But what about compatibility? DroneBlocks was immediately drawn to the open communication and ease of conversation with the Bitcraze team. It was obvious that both Bitcraze and DroneBlocks were born from a common thread and shared a mutual goal: to empower people to explore, investigate, innovate, research, and educate.
DroneBlocks has since built a new Block Coding interface around the Crazyflie, allowing students to pilot their new drone autonomously and learn the basics of piloting and coding concepts. This interface is offered with a brand new drone coding simulator environment so students can test their code and fly the Crazyflie in a virtual classroom environment.
The Crazyflie curriculum currently consists of courses covering building, configuring, and finally, programming your drone with block coding (DroneBlocks) and Python. DroneBlocks’ expert curriculum team designed these courses to enable learners of all ages and levels to learn step by step through video series and exercises. New courses around block coding and Python are in constant development and will be continuously added to the DroneBlocks curriculum platform.
Crazyflie Drones now headline DroneBlocks’ premiere classroom launch kit. The DroneBlocks Autonomous Drones Level II kit encompasses everything a middle or high school would need to launch a STEM drone program, including the hardware, necessary accessories, and safety wear paired with the DroneBlocks software and curriculum. As a result, thousands of new students have entered the world of Drones and programming thanks to the Bitcraze + DroneBlocks partnership.
DroneBlocks has become an all-inclusive drone education partner for engaging and innovative learning experiences—and the Crazyflie delivers this by being a cutting-edge piece of hardware in a clever package.
Welcome to the “The Beginner’s Guide to Drones” for programmers curious about exploring the world of unmanned aerial vehicles (UAVs). If you’re a coder from another field, this guide will walk you through the basics of drones, their components, and how to start programming them. Let’s dive in and see how your coding skills can take flight!
If you come from an engineering field, you might already know the basics of some of these topics, however you might still have use of the overview and can use the resources to get more specific knowledge.
The Robotics part
First and foremost, you’ll need some basic robotics skills. We start of with the most basic question, “What is a Robot?”. A robot uses sensors to create an internal model of its environment, and actuators to act on/in its environment. The specifics of the internal model depend on the robot’s purpose, but a crucial component is understanding its location and orientation within that environment.
Linear algebra basics
To understand how a quadcopter perceives its environment and its own position, you’ll need some basic skills in linear algebra, particularly in matrices, vectors, and frame rotation. These skills are essential for comprehending the mathematical principles behind quadcopter navigation.
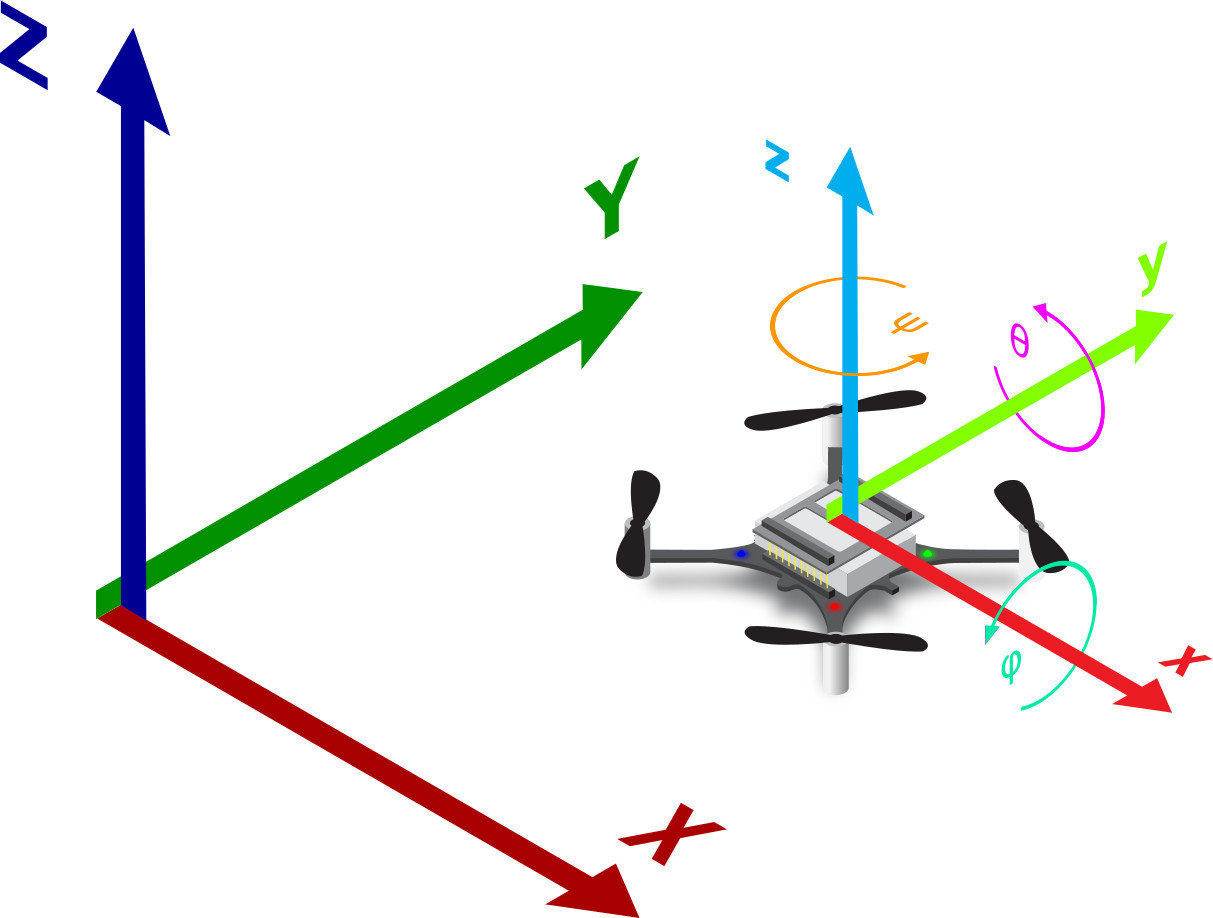
To build an internal model of its own movement and orientation, an Inertial Measurement Unit (IMU) is used. An IMU consists of a gyroscope, an accelerometer, and sometimes a magnetometer. These sensors, when combined using sensor fusion techniques (See “Control Theroy” below), help determine the quadcopter’s angular velocity and linear acceleration. This data allows the drone to calculate its orientation and movement.
Picture of a Crazyflie in relation to a reference frame from Bitcraze.io
The quadcopter can now determine its relationship to its starting position and the gravitational field. However, relying solely on an IMU tends to cause drift over time. Imagine trying to stand on one leg with your eyes closed—eventually, you’ll lose balance.
For improved stability, a drone often needs additional sensors, such as a camera, to help stabilize its position. Other sensor systems can also be used to determine relative or absolute position. While an IMU can sense changes in position relative to a starting point, an external positioning system is necessary for stability and obtaining absolute positions. This system acts as a reference frame for the drone.
Drones flying outdoors typically use GPS combined with RTCM, since it is available almost anywhere, ease to use, and has centimeter-level accuracy.
For indoor use, as with Crazyflies, the default used positioning system is motion-capture system but there are others as well. This area is at the cutting edge of science, with new technologies emerging constantly. However, many effective systems are available, though they may have constraints regarding power efficiency, flight area size, update speed, or precision.
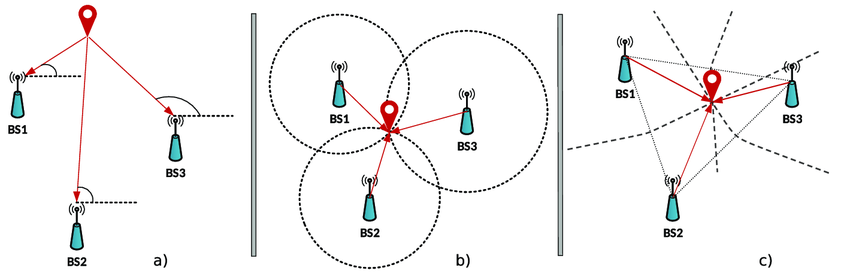
This is an image of some common techniques for positioning. a) AOA, b) TOA, TWR c) TDOA taken from Researchgate.com
Control theory
Now that drone can understand its position and orientation in space, the next step is figuring out how to move within this space. Moving from point A to point B involves setting a “setpoint” and then determining how to use the drone’s actuators to reach this setpoint most efficiently. This is where control theory comes into play.
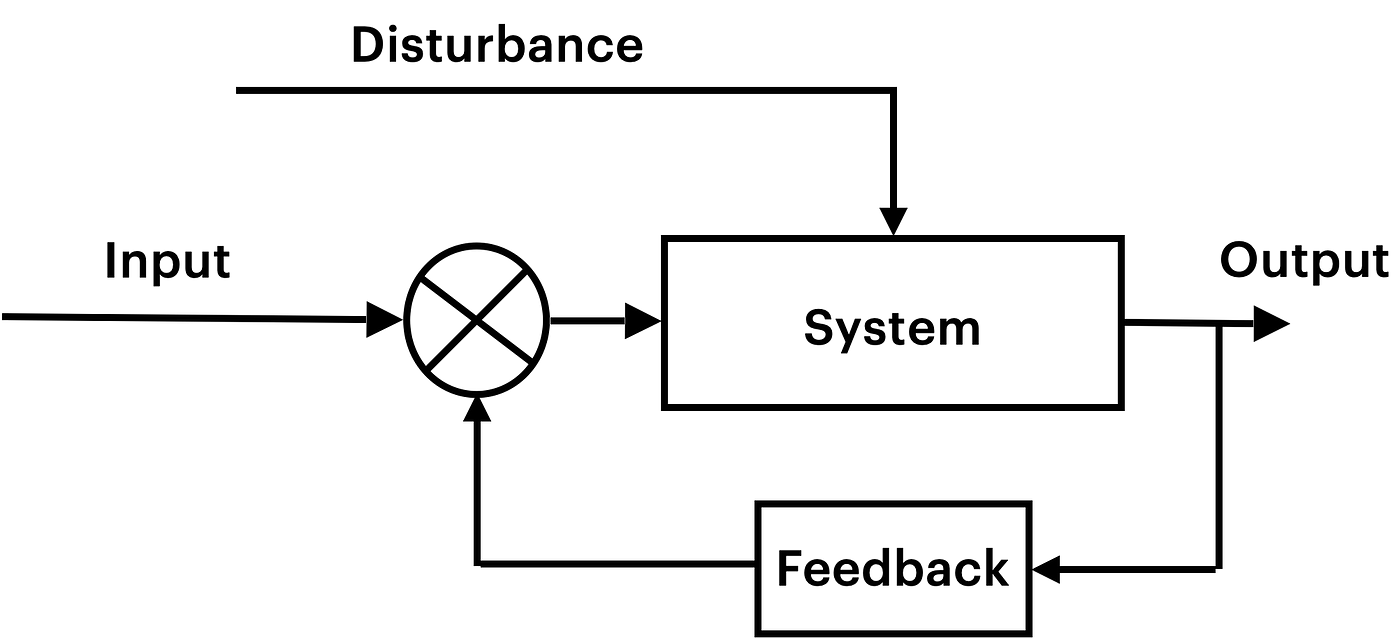
Drones generally use some sort of feedback control system, which in its most basic form looks something like this:
A very basic overview of a system with feedback control
In this system, the error (the difference between the current position and the setpoint) is fed back into the system to ensure the drone moves in a way that minimizes the error over time.
Various algorithms can calculate the best actuator output based on the error and current state. One of the most fundamental algorithms is the PID controller, which works well for linear systems. Understanding PID controllers requires some basic calculus, but the concept is straightforward. Here are some resources for simple explanations:
For IMUs, there is a particularly useful filter to know about, given its widespread use. The accelerometer and gyroscope each have their own profiles of noise and drift. The accelerometer is sensitive to short-term noise, while the gyroscope drifts slowly over time. To mitigate these issues, a combination of both measurements is often used. The complementary filter is ideal for this situation, leveraging the strengths of both sensors to correct the measurements effectively.
For more complex scenarios, advanced controllers like Kalman filters and others can be used. It’s also possible to combine multiple controllers to achieve better performance.
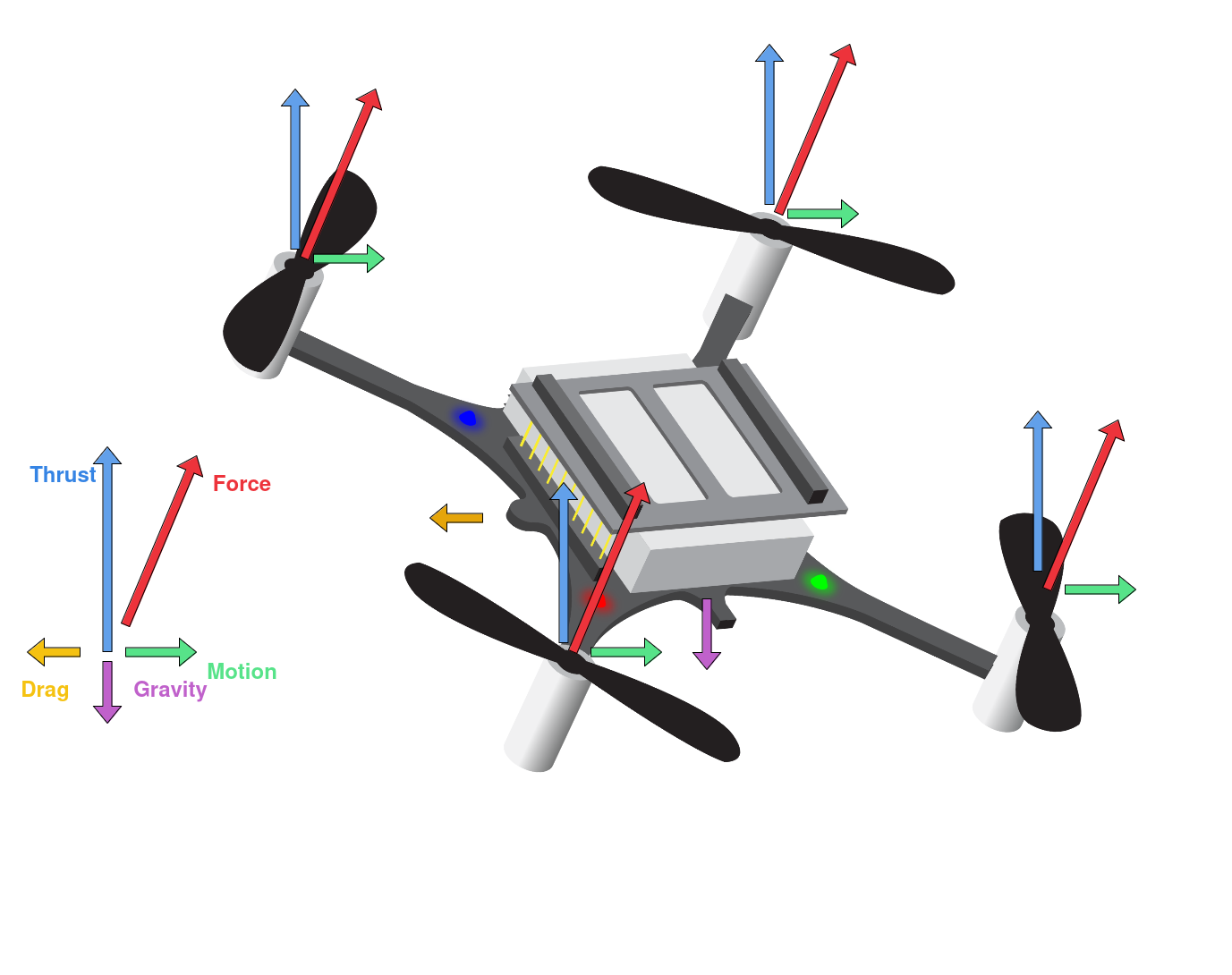
Drone actuators, primarily consisting of motors and propellers, are critical for controlling a drone’s movement and stability. The motors and propellers are typically called the “drive train” or “power train”. The motors used on drones are usually brushed or brushless DC motors. Propellers are attached to the motors and generate lift by pushing air downwards. The size, shape, and pitch of the propellers affect the drone’s performance, including speed, lift, and maneuverability. Together, the precise control of motors and propellers enables a drone to perform complex maneuvers, maintain stability, and achieve efficient flight.
Today we welcome Sam Schoedel and Khai Nguyenfrom Carnegie Mellon University. Enjoy!
We’re excited to share the research we’ve been doing on model-predictive control (MPC) for tiny robots! Our goal was to find a way to compress an MPC solver to a size that would fit on common microcontrollers like the Crazyflie’s STM32F405 while being fast enough to control the higher frequency dynamics of smaller robots. We came up with a few tricks to make that happen and dubbed the resulting solver TinyMPC. When it came time for hardware experiments, using the Crazyflie just made sense. A tiny solver deserves a tiny robot.
Motivation
Model predictive control is a powerful tool for controlling complex systems, but it is computationally expensive and thus often limited to use cases where the robot can either carry enough computational power or when offboard computing is available. The problem becomes challenging to solve for small robots, especially when we want to perform all of the computation onboard. Smaller robots have inherently faster dynamics which require higher frequency controllers to stabilize, and because of their size they don’t have the capacity to haul around as much computational power as their larger robot counterparts. The computers they can carry are often highly memory-constrained as well. Our question was “how can we shrink the computational complexity and memory costs of MPC down to the scale of tiny robots?”
What We Did
We settled on developing a convex model predictive control solver based on the alternating direction method of multipliers. Convex MPC solvers are limited to reasoning about linear dynamics (on top of any other convex constraints), but have structure that TinyMPC exploits to solve problems efficiently. The tricks we used to achieve this efficiency are described in the paper, but it boils down to rewriting the problem as a constrained linear-quadratic regulator to reduce the memory footprint and then precomputing as many matrices as possible offline so that online calculations are less expensive. These tricks allowed us to fit long-time horizon MPC problems on the Crazyflie and solve them fast enough for real-time use.
What TinyMPC Can Do
We decided to demonstrate the constraint-handling capabilities of TinyMPC by having the Crazyflie avoid a dynamic obstacle. We achieved this by re-computing hyperplane constraints (green planes in the first video) about a spherical obstacle (transparent white ball) for each knot point in the trajectory at every time step, and then by solving the problem with the new constraints assuming they stayed fixed for the duration of the solve.
In the two videos below, the reference trajectory used by the solver is just a hover position at the origin for every time step. Also, the path the robot takes in the real world will never be exactly the same as the trajectory computed by the solver, which can easily result in collisions. To avoid this, we inflated the end of the stick (and the simulated obstacle) to act as a keep-out region.
TinyMPC is restricted to reasoning about linear dynamics because of its convex formulation. However, a simple linearization can be taken pretty far. We experimented with recovering from different starting conditions to push the limits of our linear Crazyflie model and were able to successfully recover from a 90 degree angle while obeying the thrust commands for each motor.
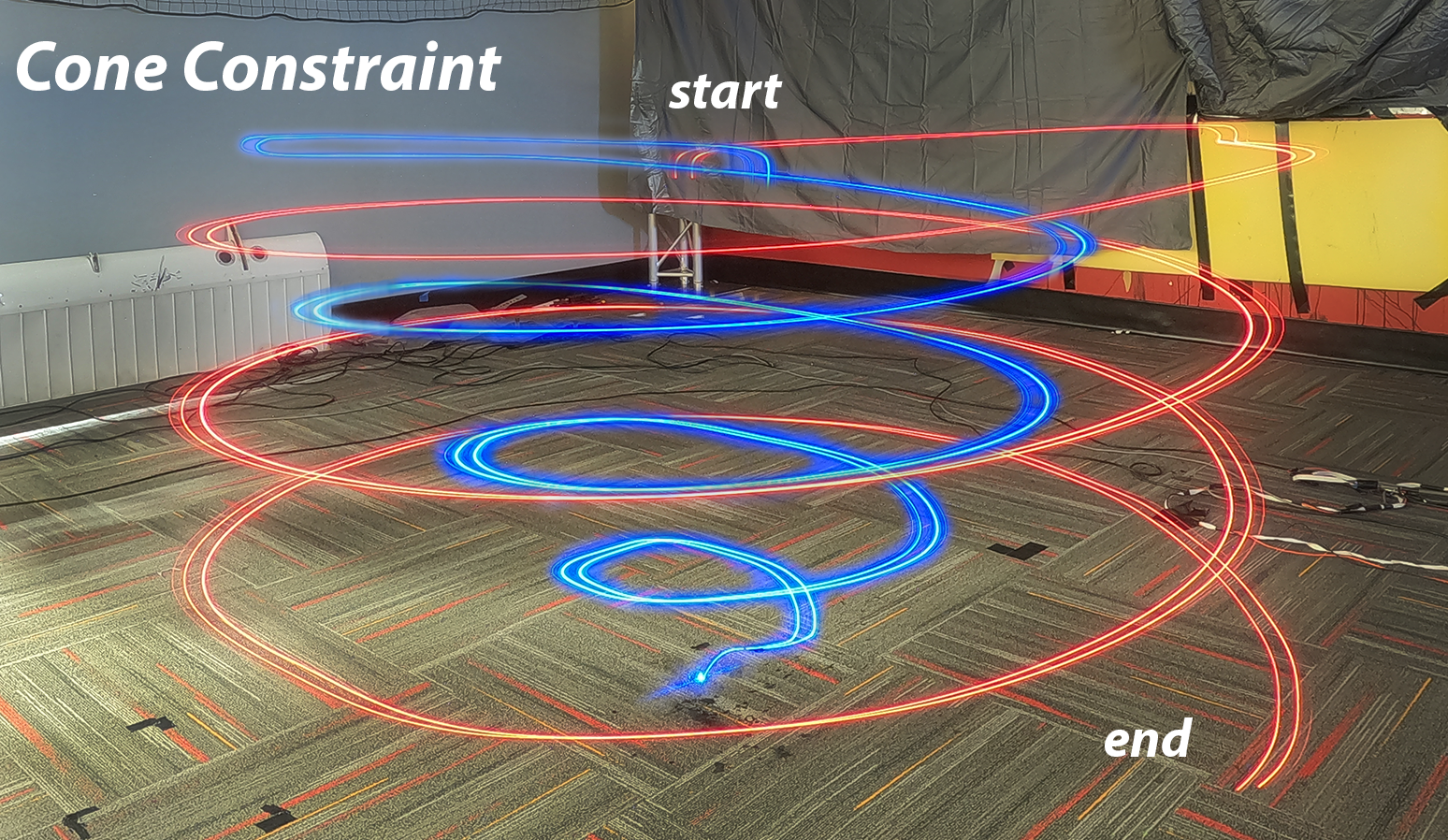
We recently added support for second-order cone constraints as well. These types of constraints allow TinyMPC to reason about friction and thrust cones, for example, which means it can now intelligently control quadrupeds on slippery surfaces and land rockets. To clearly demonstrate the cone constraint, we took long exposure photos of the Crazyflie tracking a cylindrical landing trajectory without any cone constraints (red) and then with a spatial cone constraint that restricts the landing maneuver to a glide slope (blue).
How To Use TinyMPC
All of the information regarding the solver can be found on our website and GitHub org (which is where you can also find the main GitHub repository). TinyMPC currently has a Python wrapper that allows for validating the solver and generating C++ code to run on a robot, and we have a few examples in C++ if you don’t want to use Python. Our website also explains how to linearize your robot and has some examples for setting up the problem with a linear model, solving it an MPC loop, and then generating and running C++ code.
Most importantly to the Crazyflie community, our TinyMPC-integrated firmware is available and should work out of the box. Let us know if you use it and run into issues!
Our accompanying research papers:
Khai Nguyen, Sam Schoedel, Anoushka Alavilli, Brian Plancher, and Zachary Manchester. “TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers.” arXiv preprint arXiv:2310.16985 (2023). https://arxiv.org/pdf/2310.16985
Sam Schoedel, Khai Nguyen, Elakhya Nedumaran, Brian Plancher, and Zachary Manchester. “Code Generation for Conic Model-Predictive Control on Microcontrollers with TinyMPC.” arXiv preprint arXiv:2403.18149 (2024). https://arxiv.org/pdf/2403.18149
We would love your feedback and suggestions, and let us know if you use TinyMPC for your tiny platforms!
Whenever we show the Crazyflie at our booth at various robotics conferences (like the recent ICRA Yokohama), we sometimes get comments like ‘ahh that’s cute’ or ‘that’s a fun toy!’. Those who have been working with it for their research know differently, but it seems that the general robotics crowd needs a little bit more… convincing! Disregarding its size, the Crazyflie is a great tool that enables users to do many awesome things in various areas of robotics, such as swarm robotics and autonomy, for both research and education.
We will be showing that off by giving a live tutorial and demonstration at the Robotics Developer Day 2024, which is organized by The Construct and will take place this Friday, 5th of July. We have a discount code for you to use if you want to get a ticket; scroll down for details. The code can be used until 12 am midnight (CEST) on the 2nd of July.
The Construct and Robotics Developer Day 2024
So a bit of background information: The Construct is an online platform that offers various courses and curriculums to teach robotics and ROS to their users. Along with that, they also organize all kinds of live training sessions and events like the Robotics Developer Day and the ROS Awards. Unfortunately, the deadline for voting in the latter has passed, but hopefully in the future, the Crazyflie might get an award of its own!
What stands out about the platform is its implementation of web-based virtual machines, called ‘ROSJects,’ where ROS and everything needed for it is already set up from the start. Anyone who has worked with ROS(2) before knows that it can be a pain to switch between different versions of ROS and Gazebo, so this feature allows users to keep those projects separate. For the ROS Developer Day, there will be about five live skill-learning sessions where a ROSject is already preconfigured and set up for the attendees, enabling them to try the tutorial simultaneously as the teacher or speaker explains the framework.
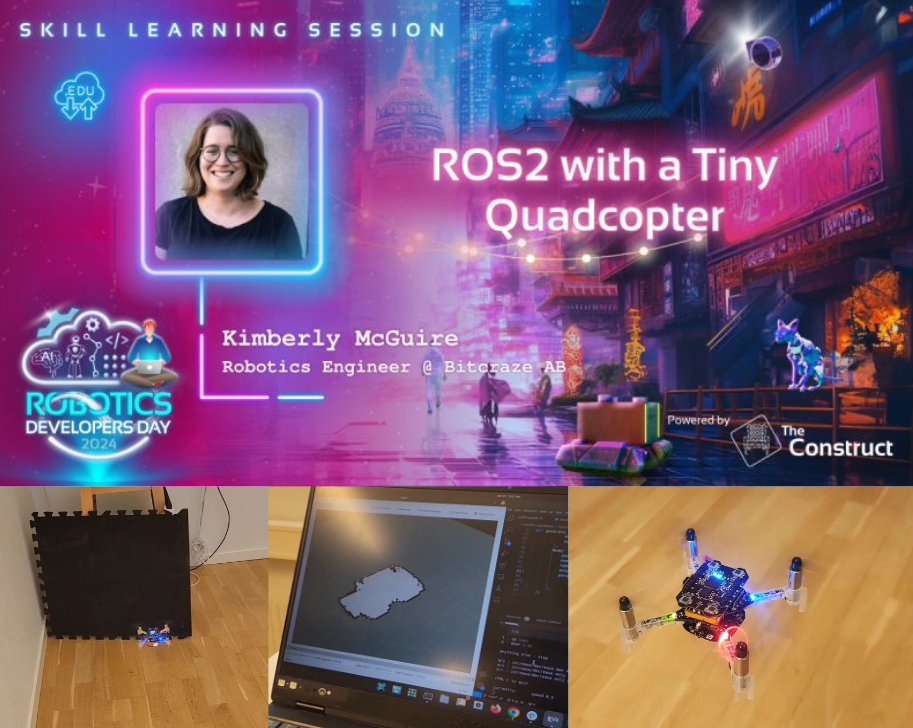
Skill learning session with the Crazyflie
One of the earlier mentioned skill learning sessions is, of course, one with the Crazyflie! The title is “ROS 2 with a Tiny Quadcopter,” and it is currently planned to be the first skill learning session of the event, scheduled at 15:15 (3:15 pm) CEST. The talk will emphasize the use of simulation in the development process with aerial robotics and iterating between the real platform and the simulated one. We will demonstrate this with a Crazyflie 2.1 equipped with a Lighthouse deck and a Multi-ranger deck. Moreover, it will also use a Qi-charging deck on a charging platform while it patiently waits for its turn :D
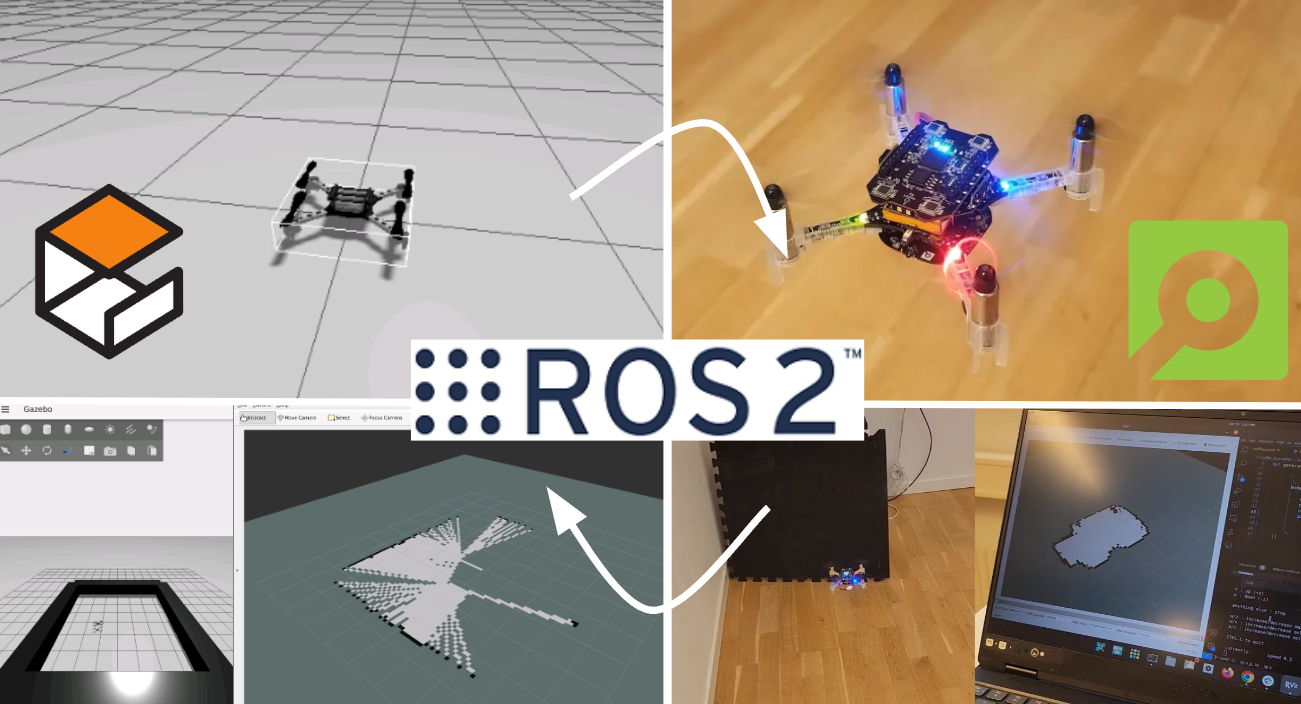
What we will be showing is a simple implementation of a mapping algorithm made specifically for the Crazyflie’s Multiranger deck, which we have demonstrated before at ROSCon Kyoto and in the Crazyswarm2 tutorials. What is especially different this time is that we are using Gazebo for the simulation parts, which required some skill learning on our side as we have been used to Webots over the last couple of years (see our tutorial for that). You can find the files for the simulation part in this repository, but we do advise you to follow the session first.
You can, if you want, follow along with the tutorial using a Crazyflie yourself. If you have a Crazyflie, Crazyradio, and a positioning deck (preferably Lighthouse positioning, but a Flowdeck would work as well), you can try out the real-platform part of this tutorial. You will need to install Crazyswarm2 on a separate Ubuntu machine and add a robot in your ROSject as preparation. However, this is entirely optional, and it might distract you from the cool demos we are planning to show, so perhaps you can try this as a recap after the actual skill learning session ;).
Here is a teaser of what the final stage of the tutorial will look like:
Win a lighthouse explorer bundle and a Hands-On Pass discount
We are also sponsors of the event and have agreed with The Construct to award one of the participants a Crazyflie if they win any contest. Specifically, we will be awarding a Lighthouse Explorer bundle, with a Qi deck and a custom-made charging pad similar to the ones we show at fairs like ICRA this year. So make sure to participate in the contests during the day for a chance to win this or any of the other prizes they have!
It is possible to follow the event for free, but if you’d like to participate with the ROSjects, you’ll need to get a hands-on pass. If you haven’t yet gotten a hands-on ticket for the Robotics Developer Day, please use our 50% off discount code:
On a side note, we will be at the Robotics: Science and Systems Conference in Delft from July 15th to 19th, 2024—just about two weeks from now. We won’t have a booth as we usually do, but we will be co-organizing a half-day workshop titled Aerial Swarm Tools and Applications (more details on this website).
We will be organizing this workshop together with our collaborators at Crazyswarm2, as well as the developers of CrazyChoir and Aerostack2. We’re excited to showcase demos of these frameworks with a bunch of actual Crazyflies during the workshop, if the demo gods are on our side :D. We will also have great speakers, including: SiQi Zhou (TU Munich), Martin Saska (Czech Technical University), Sabine Hauert (University of Bristol), and Gábor Vásárhelyi (Collmot/Eötvös University).
If you know a little about Sweden, you know about Midsommar. Nothing like the 2019 horror film (thankfully), though we do wear flower crowns and dance around the pole. It’s usually an occasion to celebrate with family (and alcohol) those long days and short nights. We actually celebrated a little bit early today with a nice team barbecue.
Midsommar is next Friday, and it marks the official kickoff to summer here in Sweden. That also means that for the coming 2 months, Bitcraze will be operating with a slightly smaller team. So, what does that mean for you? This should not impact you too much, of course, but here are the most important things to note:
Developer Meetings: First up, our regular developer meetings will be on hiatus during July and August. It’s a great time for everyone, including you, our regular attendees, to take a breather. We’ll be back in action come September, resuming our usual schedule of one meeting per month.
GitHub: With fewer team members around, our response time on GitHub discussions might be a bit slower. We strive to answer every question, but with less manpower, some issues might only get resolved when the person with the right expertise returns from their vacation. We appreciate your patience and understanding during this time.
Orders: Shipping and deliveries should have the same pace, so don’t worry about your order coming on time, we’ve got that covered!
Ongoing projects and maintenance
Our focus during the summer will shift primarily to maintenance and continuing work on ongoing projects. We’re putting the final touches on the Brushless project of course, and will keep working on its charger solution too.
We’re excited to announce our participation in Robotics Developers Day on July 5th. We’re not only sponsors of this event, we’re also thrilled that Kimberly will be hosting a live learning session about ROS 2 on the Crazyflie.
For us at Bitcraze, summer is a wonderful opportunity to slow down a bit and focus on projects we don’t usually have time for. This could mean diving deeper into learning RUST, reorganizing the office, or trying some prototypes out. It’s a chance to reset and prepare for the busy months ahead.
We hope you have a fantastic summer filled with sunshine, relaxation, and lots of new adventures. Glad Midsommar, as we say here!
As we mentioned earlier, ICRA Yokohama was full of exciting encounters – we really enjoyed meeting researchers, tech companies, and enthusiastic roboticists during those 4 days.
One challenge was to bring back as many research posters featuring the Crazyflies as possible. The goal was to decorate the walls of the office with them, as a “hall of fame”. And I’m really, really proud to show you how it turned up!
This was beforeAnd this is now!
In total, we received 6 new posters. Here they are:
This paper presents a strategy for optimizing the collaborative transportation of payloads in an under-capacitated vehicle routing scenario. The Crazyflies work together to dynamically adjust routes based on real-time data and transport capacities, and collaborate to lift and transport heavier payloads.
The paper describes a method for enabling a swarm of Crazyflies to dynamically seek and locate a moving target or source in constrained, GNSS-denied environments. Using a simple rule-based approach, the drones track dynamic source gradients and navigate obstacles autonomously with fully onboard systems.
The paper presents TinyMPC, a high-speed model-predictive control (MPC) solver designed for resource-constrained microcontrollers on small robots like the Crazyflie. TinyMPC efficiently handles real-time trajectory tracking and dynamic obstacle avoidance, outperforming traditional solvers.
The paper introduces a lightweight obstacle avoidance system for nano quadcopters, leveraging a novel 64-pixel multizone time-of-flight (ToF) sensor to safely and effectively navigate complex indoor environments. Tested on the Crazyflie 2.1, the system achieves 100% reliability at a speed of 0.5 m/s, all while using only 0.3% of the onboard processing power, demonstrating its suitability for autonomous operations in unexplored settings.
This paper introduces a method for autonomous localization in nano-sized UAVs like the Crazyflie by fusing geometric data from time-of-flight sensors with semantic information extracted from images. The approach leverages annotated floor plans to improve navigation accuracy without adding extra deployment costs. The system operates efficiently with limited onboard computational resources, achieving a 90% success rate in real-world office environments.
A big thanks, once again, to all of those who gave us their posters!
Two weeks ago, Arnaud, Barbara and Rik were at ICRA 2024 in Yokohama. At our booth we showed our current products as well as the upcoming brushless Crazyflie and the camera deck prototype.
As usual, the conference has been very busy with a lot of visitors and a lot of very interesting discussion. Thanks to everyone that passed by the booth, we have come back to Sweden with a lot of energy and new ideas!
The autonomous lighthouse swarm demo demo has worked pretty well. If you are interested to know more about it you can visit our event page. It is an autonomous demo with 3 brushless Crazyflies and 6 Crazyflie 2.1s flying autonomously. With the extended battery life of the brushless, we could operate the demo pretty much continuously.
If you’ve been at the conference, you may have spotted someone proudly sporting our exclusive ‘Bitcraze took my poster’ button. We’re excited to have received posters covering a wide range of topics, the walls of our office are eagerly awaiting these visual representations of your hard work and dedication. Thank you to everyone who has contributed.
One of the great features of the stock Crazyflie 2.1 is that it is more or less harmless. The Crazyflie 2.1 brushless weighs roughly the same but has almost twice the amount of thrust force, so a little bit of more care is needed. We therefore decided to provide optional propeller guards. While propeller guards adds safety they also add weight and disrupt the air flow from the propellers. Adding to that, the weight is located far from the center which increases the inertia even further, resulting in a less agile drone. For some applications this is not a problem but for others it is, this is why we are making them optional, meaning they are easy to replace with simple landing legs by utilizing a snap-on fitting.
The design is not fully finalized yet but we are getting close, voilá!
If the design goes according to plan they will also withstand some bumping against walls which will be a very nice feature for many applications.
Further the landing legs and propeller guards are designed in a way so they will detach during high force impacts to prevent the PCB arms from breaking.
“What? You are in Japan? Again!?”. Yup that is right! We loved IROS Kyoto 2022 so much that we just couldn’t wait to come back again. Barbara, Arnaud and Rik are setting up the booth as we speak to show some Bitcraze awesomeness to you! Come and say hi at booth IC085.
The gang before the rush starts!
Crazyflie Brushless and Camera expansion
Of all the prototypes we are the most excited of showing you the Crazyflie Brushless and the ‘forward facing expansion connector prototype’ aka the Camera deck. Here you can see them both in action at a tryout of our demo. We have also written blogposts about both so make sure to read them as well (Brushless blogpost, Camera expansion blogpost)
The Crazyflie Brushless flying with a Camera deck.
Also we will explain about the contact charging prototype (see the blogpost here) and will be showing all of our decks at the booth as well. And of course our fully autonomous, onboard, decentralized peer-to-peer and avoiding swarm demo will be displayed as always. Make sure to read this blogpost of when we showed this demo at IROS 2022 to understand what is fully going on!
We will be providing a ‘special disposal service’ for your conference poster! We would love to see what you are working on and get your poster, because we have a lot of space in our updated office/flight space but a lot of empty walls.
If you hand in your poster at the booth, you’ll get a special, one-of-a-kind, button badge that you can wear proudly during the conference! So we will see you at booth IC085!