This howto is going to describe step-by-step how to make and flash your first Crazyflie 2.x deck driver. See the deck api documentation page for more information about the code.
Development environment
You should have the crazyflie-firmware and crazyflie-clients-python cloned in the same folder. If you are using the Bitcraze VM this is already the case.
The Crazyflie firmware should be on Master branch.
For the rest of the howto you will work in the crazyflie-firmware project.
Writing the driver
Deck drivers are in the src/deck/drivers/src folder. Create this file named hello.c in the src/deck/drivers/src folder:
#define DEBUG_MODULE "HelloDeck"
#include "debug.h"
#include "deck.h"
static void helloInit()
{
DEBUG_PRINT("Hello Crazyflie 2.1 deck world!\n");
}
static bool helloTest()
{
DEBUG_PRINT("Hello test passed!\n");
return true;
}
static const DeckDriver helloDriver = {
.name = "myHello",
.init = helloInit,
.test = helloTest,
};
DECK_DRIVER(helloDriver);
Adding the driver to the build
Add this to the Kbuild file in src/deck/drivers/src/:
obj-y += hello.o
Enabling the driver
Decks can have a memory that contains its name. In our case the hello
driver would be initialized only when a deck identified as "myHello"
is installed on the Crazyflie. For development purpose it is possible to
force enabling a deck driver with a compile flag. To do so set the
CONFIG_DECK_FORCE config option to "myHello" in your .config either
by hand or using make menuconfig.
CONFIG_DEBUG=y allows to get more information from the Crazyflie console when
it starts. Debug should not be enabled if you intend to fly the
Crazyflie out of the lab (it disables the watchdog).
Note Each time you modify your .config you
should recompile the full firmware by cleaning up the build folder with
'make clean'
Compile, flash and run!
Now the last step is to compile and flash your new firmware. Launch the following commands in a shell:
crazyflie-firmware$ make clean && make
crazyflie-firmware$ make cload
If you see
*** Configuration file ".config" not found!, make sure select the right build config. Please see the build instructions
The output will be similar to the following:
crazyflie-firmware$ make
(...)
CC hello.o
(...)
Build for the CF2 platform!
Build 22:f8243162f727 (2020.04 +22) MODIFIED
Version extracted from git
Crazyloader build!
Flash | 218132/1032192 (21%), 814060 free | text: 213024, data: 5108, ccmdata: 0
RAM | 71564/131072 (55%), 59508 free | bss: 66456, data: 5108
CCM | 43528/65536 (66%), 22008 free | ccmbss: 43528, ccmdata: 0
crazyflie-firmware$ make cload
../crazyflie-clients-python/bin/cfloader flash cf2.bin stm32-fw
Restart the Crazyflie you want to bootload in the next
10 seconds ...
done!
Connected to bootloader on Crazyflie 2.0 (version=0x10)
Target info: nrf51 (0xFE)
Flash pages: 232 | Page size: 1024 | Buffer pages: 1 | Start page: 88
144 KBytes of flash available for firmware image.
Target info: stm32 (0xFF)
Flash pages: 1024 | Page size: 1024 | Buffer pages: 10 | Start page: 16
1008 KBytes of flash available for firmware image.
Flashing 1 of 1 to stm32 (fw): 161867 bytes (159 pages) ..........10..........10..........10..........10..........10..........10..........10..........10..........10..........10..........10..........10..........10..........10..........10.........9
Reset in firmware mode ...
$
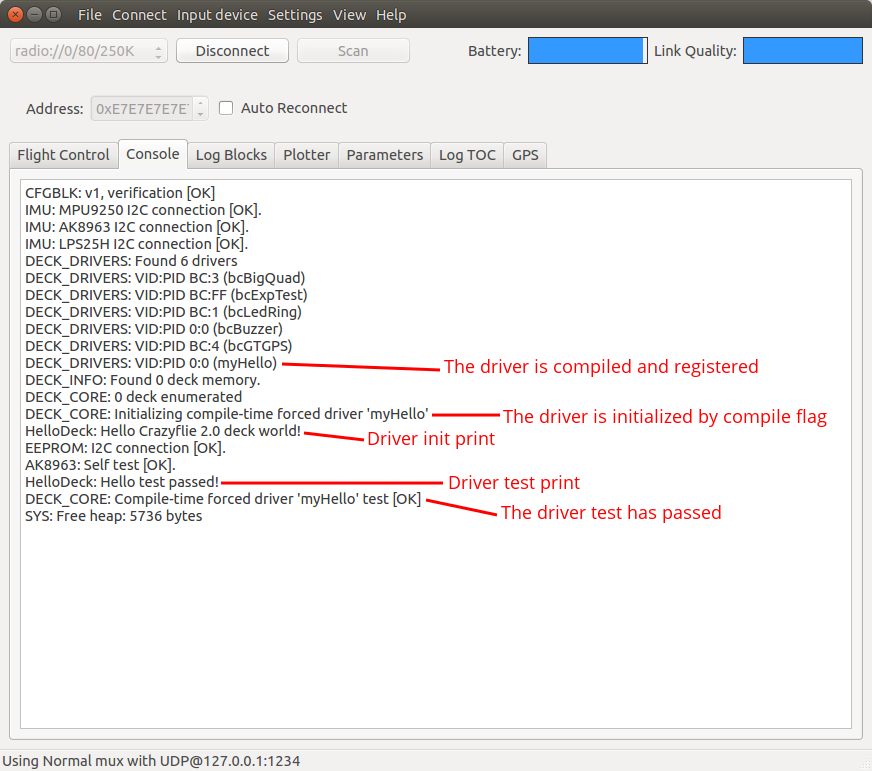
Now you can connect your Crazyflie with the client and see your driver in the console!