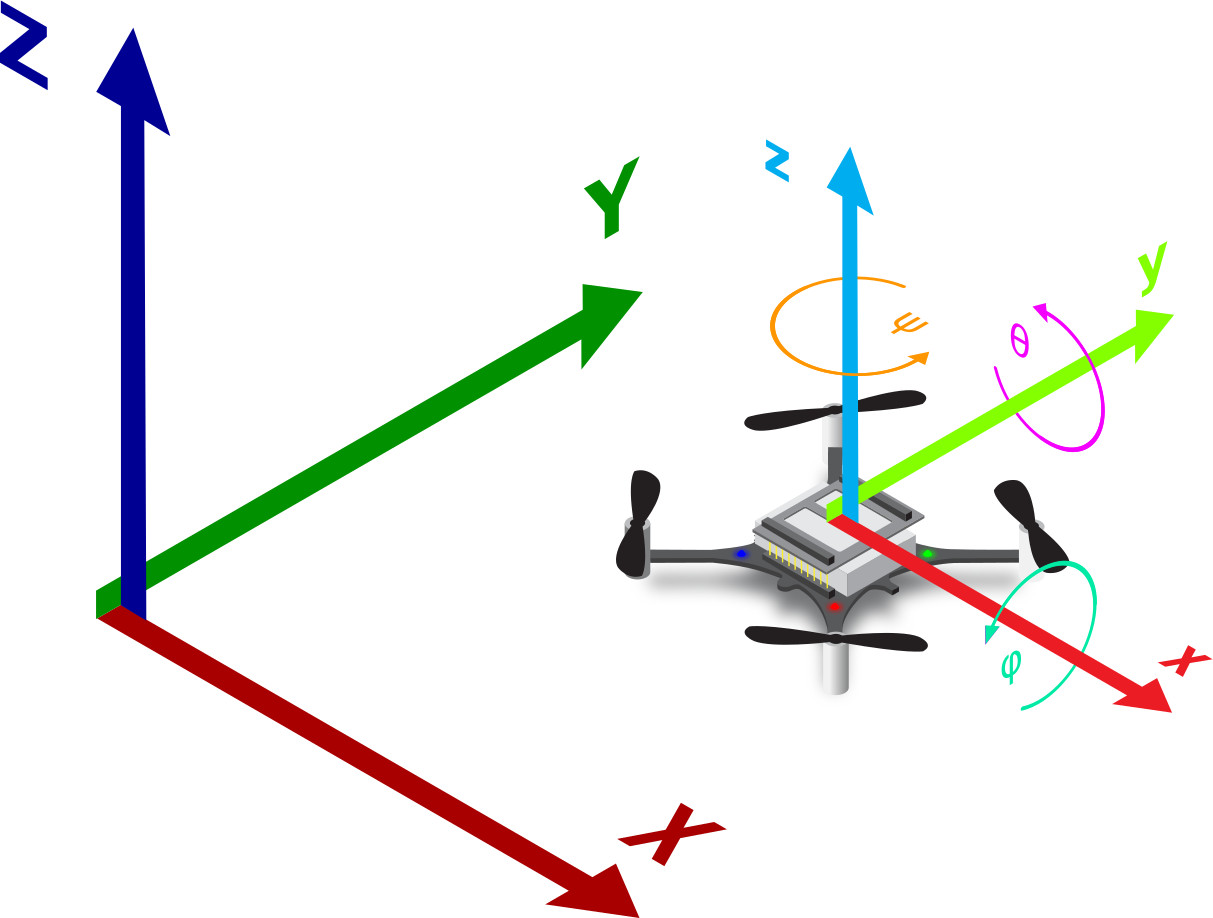
This page shows the coordinate system used in the Crazyflie 2.x family. The global coordinate system (X, Y, Z) is in the EAST NORTH UP (ENU) convention, as is the body fixed (local) coordinate system (x, y, z). The attitude angles roll, pitch and yaw (φ, θ, ψ) are in the following rotation rules
- roll and yaw are clockwise rotating around the axis looking from the origin (right-hand-thumb)
- pitch are counter-clockwise rotating around the axis looking from the origin (left-hand-thumb)