This week, some of us are on an adventure! Marcus and Tobias will be exploring both the RIG and Embedded World fairs.
RIG showcases the latest innovations in robotics and intelligent systems, while Embedded World is the place to be for cutting-edge embedded technologies. Both events promise amazing demos, insightful talks, and a chance to catch up with some of our collaborators.
Planning to attend either fair? Let’s meet up! We’d love to explore the exhibitions together, chat about cool technologies, or just geek out about the innovations on display. We’ll be wandering through Embedded World on Thursday and hitting RIG on Friday. Send us an email if you’d like to connect – we’re always up for grabbing coffee!
Next May in Atlanta
After our adventures as visitors, we’re thrilled to announce that we’ll be exhibiting at the International Conference on Robotics and Automation (ICRA) 2025! Stop by our booth where we’ll be showcasing our latest demo. We’ll be, as always, available to discuss our newest products, answer your technical questions, and provide insights into how our solutions can transform your robotics applications. We’re also eager to hear your thoughts on what you’d like to see in our upcoming products. Mark your calendars and make sure to find us at Booth #131 – we may even have some presentations in the work, but nothing confirmed yet.
Today in the shop
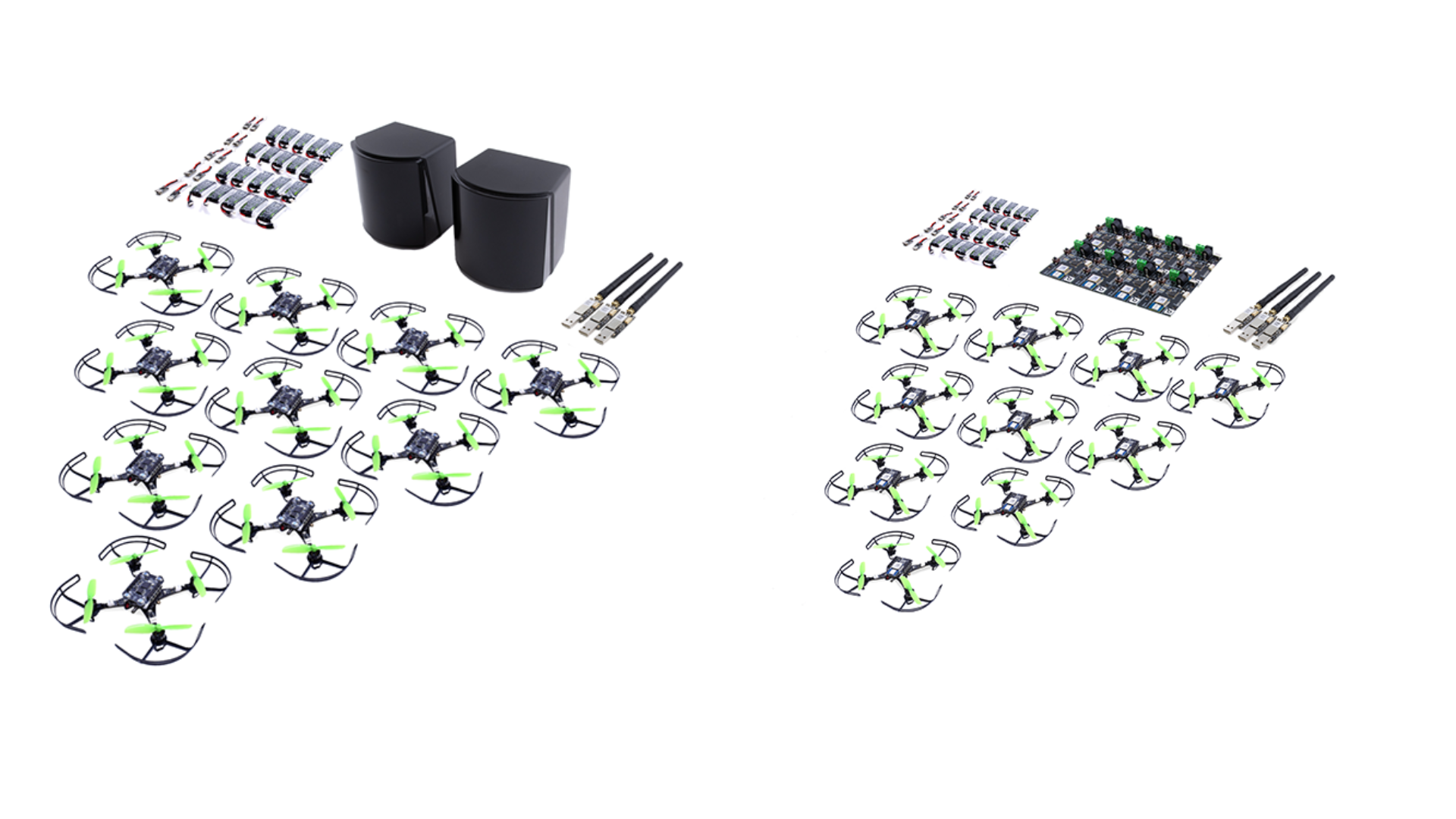
And, last but not least, the Brushless is now available in a Swarm configuration! Both the Lighthouse Swarm bundle and Loco Swarm bundle have been added to our shop. These new bundles feature all the same components as our standard Swarm packages, but come equipped with the Crazyflie 2.1 Brushless instead of the Crazyflie 2.1+ model.
We’re happy to announce that release 2025.02 is now available. This update includes fixes and improvements for the Crazyflie 2.1 Brushless, along with stability enhancements for the AI-deck.
It’s hard to believe it’s already been almost a month since the Crazyflie 2.1 Brushless was released. We know some of you have already had the chance to take it for a spin, and we’re really excited to hear what you think.
Here at the office, we have started using them a lot – to discover gaps in the documentation, to test our new features, or simply to make nice trajectories during a Fun Friday as shown here:
We’re constantly amazed by it and the new capacity it brings… But, interestingly, we haven’t received many support questions so far… which has us wondering—did we accidentally make it too good? Jokes aside, we’d love to get your thoughts! Whether you have feedback, questions, or just want to share your experience, we’re all ears.
We have a quick form for you here to fill out – it takes a couple of minutes and would help us a lot:
The Crazyflie 2.1 Brushless with propeller guards on a prototype charging padThe optimized brushless motor
Finalizing the integration of the Crazyflie 2.1 Brushless into our software ecosystem and expanding its documentation were key steps in preparing for its launch. These efforts ensure compatibility, improve the user experience, and make the platform more accessible to the community. We’re looking forward to a smooth launch and to seeing how the community will utilize the new platform!
This year, we introduced updates to the Crazyflie 2.1 kit, making the 47-17 propellers the new default and including an improved battery. These upgrades enhance flight performance and endurance, culminating in the release of the Crazyflie 2.1+—an optimized iteration of our established platform.
And don’t forget the developer meetings, where we shared some more behind the scenes information and collected invaluable feedback from the community.
We also released a new edition of our research compilation video, showcasing some of the coolest projects from 2023 and 2024 that highlight the versatility and impact of the Crazyflie platform in research.
Team
In the past year, Bitcraze saw significant changes within the team. in February, Rik rejoined the team. Tove started at Bitcraze in April. Mandy, with whom we’ve already worked extensively over the years, joined as our production representative in Shenzen. At the end of the year, we said goodbye to Kimberly, whose contributions will be deeply missed. Additionally, we had Björn with us for a few months, working on his master’s thesis on fault detection, and Joe continued his industrial postdoc at Bitcraze that began in December 2023. Looking ahead, Bitcraze is hiring for two new roles: a Technical Sales Lead and a Technical Success Engineer, to support our ongoing projects and customer collaborations.
Midsummer lunch with the teamChristmas-themed Bitcraze office
As we close the chapter on 2024, we’re proud of the progress we’ve made, the connections we’ve strengthened, and the milestones we’ve reached. With exciting launches, new faces on the team, and continued collaboration with our community, we’re ready to soar to even greater heights in 2025. Thank you for being part of our journey!
Hi everyone! I have a bit of news to share… I’ve decided to leave Bitcraze at the end of 2024. But not before I share with you my latest Fun Friday project that I’ve tried my best to finish up before I leave before my Christmas holiday in December.
Frankensteining the Pololu Robot with the Crazyflie Bolt
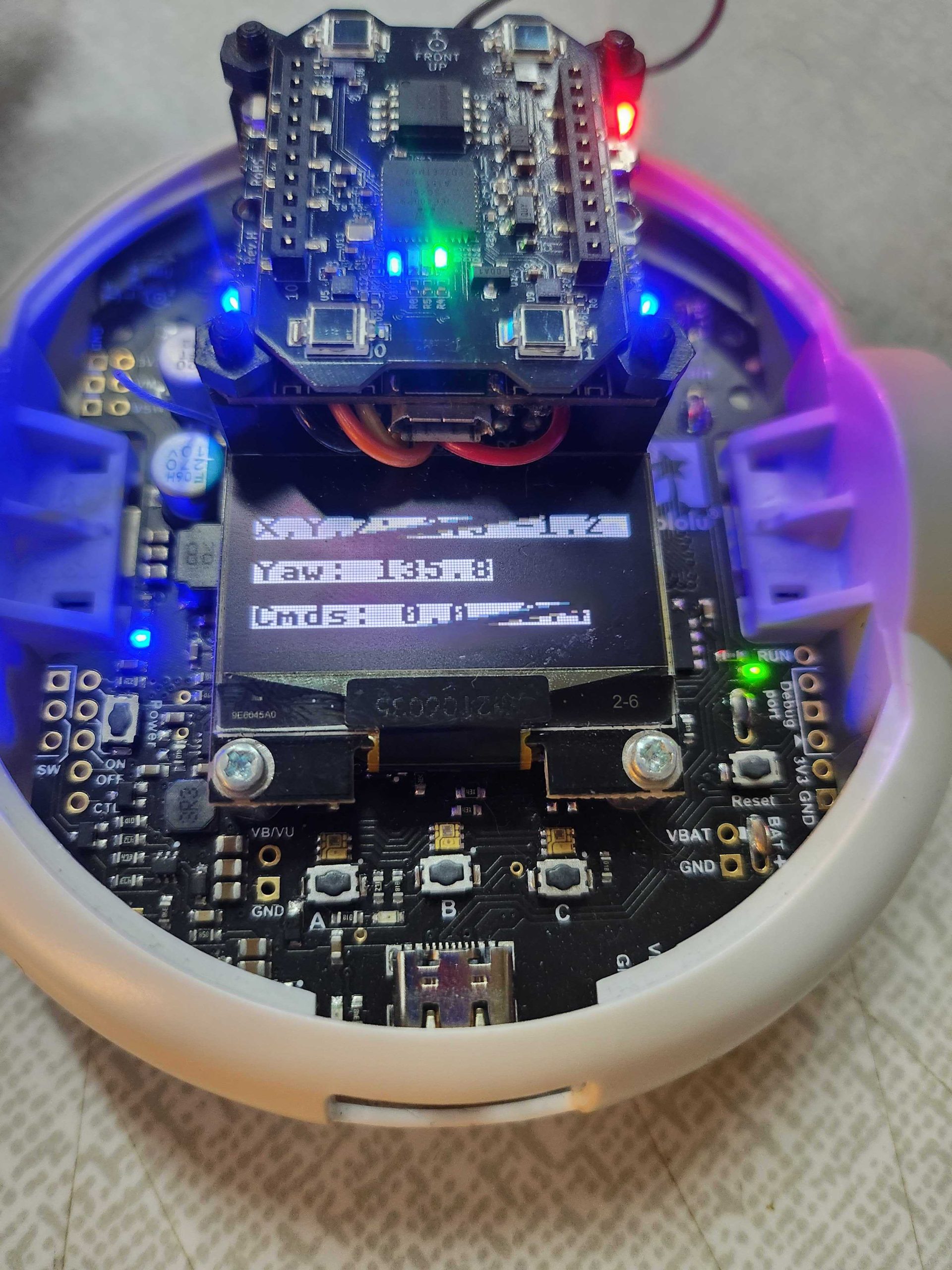
During the ROSCon talk about the lighthouse system (see the recording here), I’ve already shown a small example of how the lighthouse system could be used on other robots as well. Here you see a Pololu RPI 2040 (the hyper edition of course), with a slimmed down Crazyflie Bolt and a Lighthouse deck. The UART2 port on the Bolt (pinout is the same as Crazyflie) is interfacing with the UART0 connection on the Pololu (pinout). Then the Pololu’s 3v3 is connected to the vUSB and GND to GND (obviously), so 4 wires in total. Technically, the 3v3 port is not supplying enough power for the Crazyflie on paper, but it seemed to be enough as long as the Crazyflie Bolt doesn’t have motors connected it should be fine. But if anyone would like to do a driving-flying hybrid with this combo, you might need to check the specifications a bit closer. For now, just ignore the red low-battery LED on the Bolt, but if you see it restarting then perhaps give the Pololu a fresh set of batteries.
Since the Pololu RPI 2040 doesn’t have any wireless communication, this can be done through the Crazyflie Bolt and the Crazyradio. I’ve made an app layer variant for the Bolt to forward state estimates and velocity commands; however, it did require a bit of an extra logging variable in the firmware itself. But this allows me to control the Pololu through the CFclient! Since it’s using velocity commands, this means that the mobile app is out though, but perhaps if anyone is interested in getting this rolling, let me know. Also, the screen shows the current X, Y, Z, and yaw estimate of the Bolt transferred to the Pololu with the commands that I’ve given it.
I’d like to have connected this to a differential drive controller to make use of the position setpoints, but unfortunately the AA batteries ran out at the office and I was unable to complete this by the last day. It would have been great to use the Lighthouse positioning for this. Perhaps in the next coming months, I can try to continue with it and have my cats chase an autonomous robot around the house, who knows! If anyone is interested in playing around with this, these are the repositories/branches for both the Bolt and the Pololu:
First of all, I’ll take a long holiday in the US, first visiting New York (first time) before I hop over to Tulsa and Santa Barbara to visit family. Early 2025 I’ll be taking a long break, or a mini sabbatical of sorts, where I plan to work on some personal projects but mostly have a breather. I haven’t had a break like this in over 15 years, and given a tough 2023, I can definitely say that I’ve deserved some time off. What will happen after, I will hopefully figure out then, but for sure I will be continuing to co-lead the Aerial Robotics Interest Group at ROS and helping out in support of the Crazyswarm2 project.
I’d like to thank my colleagues at Bitcraze for an amazing 5 years here in Malmö, Sweden, and everyone that I was able to meet through them. I’ve learned a lot in terms of joint software development, code maintenance, community interaction, and, most importantly, having fun during work. I also will never forget the support I received while I was going through cancer treatment, and for that I’m very grateful. I wish you all the best and I hope the Crazyflie continues to thrive, saving more PhD projects as it did mine. Thank you.
It’s been a while since I last talked about hiring! We successfully onboarded our most recent recruit, and now it’s time to start planning for the future.
One of our challenges as a team is that we’re very heavy on engineers and developers. While that’s fantastic for building products, it means we lack expertise in other important areas. That’s why we’re now shifting our focus to bringing in talent to help fill those gaps. We’ve partnered with a recruitment agency once again to help us find the right people for the job. We’re currently hiring for two distinct roles—here’s what we’re looking for!
Technical sales lead
You will be responsible for developing and implementing sales strategies while exploring both new and existing markets. You’ll take the lead in driving sales and acquiring new customers, becoming the company’s go-to expert on marketing and sales tactics. Your day-to-day tasks will include supporting business development, optimizing sales processes, and proposing effective marketing strategies. This role is perfect for someone with a background in technical sales with a strong strategic mindset and a sense of responsibility.
We’re looking for a Technical Success Engineer to provide our customers with technical guidance and product expertise. This role involves offering first-line support, creating documentation and tutorials, and assisting with tech-focused sales efforts. The goal is to ensure a smooth and seamless customer experience while building strong client relationships. It’s an ideal position for a “social developer”—someone with a solid technical background who also excels in communication and enjoys engaging with others.
Both positions are full-time and based at our office in Malmö, Sweden. If you’re curious about why you should join our team, I’ve already shared some of the many reasons why I love being part of Bitcraze.
If you’re interested or have any questions, please send an email to fredric.vernqvist@techtalents.se or contact us at contact@bitcraze.se.
We are excited to announce that we are working on several new link performance metrics for the Crazyflie that will simplify the troubleshooting of communication issues. Until now, users have had access to very limited information about communication links, relying primarily on a “link quality” statistic based on packet retries (when we have to re-send data) and an RSSI channel scan. Our nightly tests have been limited to basic bandwidth and latency testing. With this update, we aim to expose richer data that not only enables users to make more informed decisions regarding communication links but also enhances the effectiveness of our nightly testing process. In this blog post, we will explore the new metrics, the rationale behind their introduction, and how they will improve your interaction with the Crazyflie. Additionally, we will be holding a developer meeting on Wednesday November 13th to discuss these updates in more detail, and we encourage you to join us!
“Link Quality”—All or Nothing
Until now, users of the Crazyflie have had access to a single link quality metric. Implemented in the Python library, this metric is based on packet retries—instances when data packets need to be re-sent due to communication issues. This metric indicates that for every retry, the link quality drops by 10%, with a maximum of 3 retries allowed. As a result, the link quality score usually ranges from 70% to 100%, with a drop to 0% when communication is completely lost. However, as packet loss occurs, users often experience a steep decline, commonly seeing 100% when packets are successfully acknowledged or dropping to 0% when communication is completely lost.
Client representation of link quality; no link, yes link
The current link quality metric has served as a basic indicator but provides limited insight, often making it difficult to gauge communication reliability accurately. Recognizing these limitations, we’re introducing several new link performance metrics to the Crazyflie Python library, designed to provide a far more detailed and actionable view of communication performance.
What’s Coming in the Upcoming Update
The first metric we are adding is latency. We measure the full link latency, capturing the round-trip time through the library, to the Crazyflie, and back. This latency measurement is link-independent, meaning it applies to both radio and USB connections. The latency metric exposed to users will reflect the 95th percentile—a commonly used measure for capturing typical latency under normal conditions.
Next are several metrics that (currently) only support the radio link. For these, we distinguish between uplink (from the radio to the Crazyflie) and downlink (from the Crazyflie to the radio).
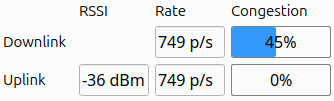
The first is packet rate, which simply measures the number of packets sent and received per second.
More interestingly, we are introducing a link congestion metric. Whenever there is no data to send, both the radio and the Crazyflie send “null” packets. By calculating the ratio of null packets to the total packets sent or received, we can estimate congestion. This is particularly useful for users who rely heavily on logging parameters or, for example, stream mocap positioning data to the Crazyflie.
The Received Signal Strength Indicator (RSSI) measures the quality of signal reception. Unlike our current “link quality” metric, we hope that a poor RSSI will serve as an early warning signal for potential communication loss. While RSSI tracking has been possible before with the channel scan example, this update will monitor RSSI in the library by default, and expose it to the user. The nRF firmware will also be updated to report RSSI by default. Currently, we only receive uplink RSSI, that is, RSSI measured on the Crazyflie side.
Work in progress client representation of new link performance metrics
We’ve already found these new metrics invaluable at Bitcraze. While we have, of course, measured various parameters throughout development, it was easy to lose track of the precise status of the communication stack. In the past, we relied more on general impressions of performance, but with these new metrics, we’ve gained a clearer picture. They’ve already shed light on areas like swarm latency, helping us fine-tune and understand performance far better than before.
You can follow progress on GitHub, and we invite you to try out these metrics for yourself. If there’s anything you feel is missing, or if you have feedback on what would make these tools even more helpful, we’d love to hear from you. Hit us up over on GitHub or join the developer meeting on Wednesday the 13th of November (see the join information on discussions).
We are happy to announce that release 2024.10 is now available! Special thanks to our community contributors for their valuable input and code contributions in this release!
It’s now become a tradition to create a video compilation showcasing the most visually stunning research projects that feature the Crazyflie. Since our last update, so many incredible things have happened that we felt it was high time to share a fresh collection.
As always, the toughest part of creating these videos is selecting which projects to highlight. There are so many fantastic Crazyflie videos out there that if we included them all, the final compilation would last for hours! If you’re interested, you can find a more extensive list of our products used in research here.
The video covers 2023 and 2024 so far. We were once again amazed by the incredible things the community has accomplished with the Crazyflie. In the selection, you can see the broad range of research subjects the Crazyflie can be a part of. It has been used in mapping, or swarms – even in heterogeneous swarms! With its small size, it has also been picked for human-robot interaction projects (including our very own Joseph La Delfa showcasing his work). And it’s even been turned into a hopping quadcopter!
Here is a list of all the research that has been included in the video:
Energy efficient perching and takeoff of a miniature rotorcraft Yi-Hsuan Hsiao, Songnan Bai, Yongsen Zhou, Huaiyuan Jia, Runze Ding, Yufeng Chen, Zuankai Wang, Pakpong Chirarattananon City University of Hong Kong, Massachusetts Institute of Technology, The Hong Kong Polytechnic University
But enough talking, the best way to show you everything is to actually watch the video:
A huge thank you to all the researchers we reached out to and who agreed to showcase their work! We’re especially grateful for the incredible footage you shared with us—some of it was new to us, and it truly adds to the richness of the compilation. Your contributions help highlight the fantastic innovations happening within the Crazyflie community. Let’s hope the next compilation also shows projects with the Brushless!
This week, we have a guest blog post from Scott at Droneblocks.
DroneBlocks is a cutting-edge platform that has transformed how educators worldwide enrich STEM programming in their classrooms. As pioneers in the EdTech space, DroneBlocks wrote the playbook on integrating drone technology into STEM curriculum for elementary, middle, and high schools, offering unparalleled resources for teaching everything from computer science to creative arts. What started as free block coding software and video tutorials has become a comprehensive suite of drone and robotics educational solutions. The Block-Coding software still remains free to all, as the DroneBlocks mission has always been to empower educators and students, allowing them to explore and lead the way. This open-source attitude set DroneBlocks on a mission to find the world’s best and most accessible micro-drone for education, and they found it in Sweden!
Previously, DroneBlocks had worked alongside drone juggernaut DJI and their Tello Drone. The Tello was a great tool for its time, but when DJI decided to discontinue it with little input from its partners and users, it made the break much easier. The hunt began for a DJI Tello replacement and an upgrade!
Bitcraze’s choice to build Crazyflie as an open platform had their drone buzzing wherever there was curiosity. The Crazyflie was developed to fly indoors, swarm, and be mechanically simplistic. DroneBlocks established that the ideal classroom micro-drone required similar characteristics. This micro-drone needed to be small for safety but sturdy for durability. It also needed to be easy to assemble and simple in structure for students new to drones. Most importantly, the ideal drone needed to have an open line of software communication to be fully programmable. Finally, there had to be an opportunity for a long-lasting partnership with the drone manufacturer, including government compliance.
After extensive searching and testing by DroneBlocks, the Crazyflie was a diamond in the rough – bite-sized and lightweight, supremely agile and accurate, reliable and robust, and most importantly, it was an open-source development platform. The DroneBlocks development team took the Crazyflie for a spin (or several) and with excitement, it was shared with the larger curriculum team to be mined for learning potential. It was promising to see Crazyflie’s involvement in university-level research studies, which proved it meant business. DroneBlocks knew the Crazyflie had a lot going for it – on its own. The team imagined how, when paired with DroneBlocks’ Block Coding software, Flight Simulator, and Curriculum Specialists, the Crazyflie could soar to atmospheric heights!
Hardware? Check. Software? Check. But what about compatibility? DroneBlocks was immediately drawn to the open communication and ease of conversation with the Bitcraze team. It was obvious that both Bitcraze and DroneBlocks were born from a common thread and shared a mutual goal: to empower people to explore, investigate, innovate, research, and educate.
DroneBlocks has since built a new Block Coding interface around the Crazyflie, allowing students to pilot their new drone autonomously and learn the basics of piloting and coding concepts. This interface is offered with a brand new drone coding simulator environment so students can test their code and fly the Crazyflie in a virtual classroom environment.
The Crazyflie curriculum currently consists of courses covering building, configuring, and finally, programming your drone with block coding (DroneBlocks) and Python. DroneBlocks’ expert curriculum team designed these courses to enable learners of all ages and levels to learn step by step through video series and exercises. New courses around block coding and Python are in constant development and will be continuously added to the DroneBlocks curriculum platform.
Crazyflie Drones now headline DroneBlocks’ premiere classroom launch kit. The DroneBlocks Autonomous Drones Level II kit encompasses everything a middle or high school would need to launch a STEM drone program, including the hardware, necessary accessories, and safety wear paired with the DroneBlocks software and curriculum. As a result, thousands of new students have entered the world of Drones and programming thanks to the Bitcraze + DroneBlocks partnership.
DroneBlocks has become an all-inclusive drone education partner for engaging and innovative learning experiences—and the Crazyflie delivers this by being a cutting-edge piece of hardware in a clever package.