This week we wanted to reflect on the progress that has been made lately in the Crazyflie ecosystem which will lead to bigger and better Crazyflie Swarms.
Radio communication
Like pointed out in the last blog post about Building a Crazyflie Flower Swarm with Rust, the new Rust Crazyflie library together with the new Crazyradio 2.0 has improved connection time and link efficiency by quite a bit.
It is now possible to connect swarms of multiple dozens of Crazyflies in seconds using a single radio and then make them fly while still getting position telemetry. So many Crazyflie on one radio does limit the maximum bandwidth per Crazyflie, but it does now work in a stable way!
Color LED deck
The recently released Color LED deck is a great addition to the ecosystem towards swarm. Its predecessor, the Led-ring Deck, has been used a lot by researchers to indicate state of individual Crazyflies in a Swarm. The Color LED Deck improves on that by providing a diffuser that allows to see the color from the side. This allows to mark states of big groups of Crazyflie much more clearly.
As a bonus, the Color LED Deck is very usable in other field like art and shows since it is much more visible and can be used to fly Crazyflies as “Flying Pixels”.
Autonomous landing and charging
Last year, we have released a Crazyflie 2.1 Brushless charging dock. This is a produced version of an idea we have been using with Crazyflie 2.1 and the Qi deck for years at fairs and conferences. It allows Crazyflies to autonomously land and charge. It is not only great for autonomous drone demos and shows but it also is a great waiting spots for swarms when doing research: the charging dock keeps the swarm charged so that when it is time to take off all the individuals starts with the same battery level.
Future endeavors
On the radio side there are still areas that would bring great improvement on communication stability. We are for example working on a channel-hopping communication protocol that should make the connection mostly immune to regular interference on 2.4GHz.
We are also working at improving other parts of swarm management, this includes for example solving the problem of flashing a full swarm of Crazyflie with the same firmware: we may be able to use broadcast messages more in order to drastically speed up the process instead of flashing the Crazyflie one per one.
Overall, working on bigger swarms allows us to work on the full stack and to make the Crazyflie a better drone for everybody.
Bitcraze will exhibit at the European Robotics Forum 2026 March 23-27 in booth #90, where we will demonstrate a live, autonomous indoor flight setup based on the CrazyflieTM platform. The demonstration features multiple nano-drones flying autonomously in a controlled environment and reflects how the platform is used in research and applied robotics development.
Why Indoor Aaerial Testbeds Matter
The purpose of the demonstration is not the flight itself, but the role such setups play in validating aerial robotics concepts. Indoor, small-scale aerial systems allow researchers and R&D teams to study autonomy, perception, control, and multi-robot coordination under safe and repeatable conditions. This makes it possible to explore system behavior, test assumptions, and iterate rapidly before moving to larger platforms or less controlled environments.
Applicable in Both Academia and Industrial R&D
Bitcraze is used both in academic research and in industrial R&D contexts. In academia, the platform supports experimental work in areas such as swarm robotics, learning-based control, and human–robot interaction, and has been referenced in hundreds of peer-reviewed research papers worldwide. In industry, similar setups are increasingly used as testbeds to de-risk development by validating ideas indoors before scaling to outdoor testing, larger drones, or other robotic systems that require higher investment and operational complexity.
Hands-on Discussions at the Booth
At the booth, the live flight cage will be complemented by hands-on access to additional drones, expansion decks, and software tools. This allows for technical discussions around hardware architecture, sensing and positioning options, software stacks, and how different configurations support different research or development goals.
The Conversations We Are at ERF to Have
At ERF, Bitcraze is there to engage in conversations about platforms, testbeds, and how ambitious aerial robotics ideas can be validated in a financially responsible, safe, and controlled manner. This includes discussions with academic groups, industrial R&D teams, and project partners working across the research-to-application spectrum.
Looking forward to the discussions in Stavanger in booth #90!
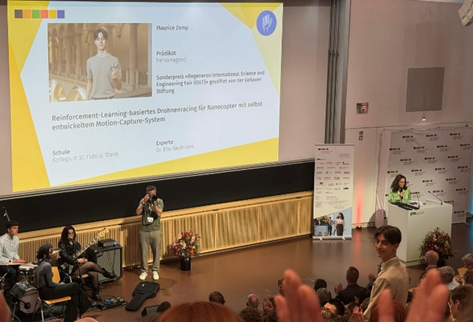
Today, we rejoin with Maurice Zemp who presented his work in an earlier blogpost.
Road to the Finals
I had officially completed my Matura thesis in October 2024 and submitted it to the Schweizer Jugend forscht competition. When I was selected for the semifinals, I was given the chance to present my work in front of a jury. Their feedback was highly constructive and came with clear requirements: for the finals, I would need to provide more in-depth analyses of the individual system components of my project. At first, this felt like a challenge, but in the process I realized how much these refinements elevated my research. By the time the finals approached, I felt both nervous and proud, knowing that the work I would present had grown far beyond the version I had initially submitted. On April 24, 2025, the big moment finally arrived – the start of the national finals.
Fig. 8: The Location of the semifinals
Day 1
The day began with my journey to ETH Zurich. Traveling by public transport, I carried my Crazyflie drone and the racing gate with me – equipment that had accompanied me throughout countless hours of development and testing and with which I wanted to make the comprehension of my project a bit more feasible. Arriving at ETH, I was greeted warmly at the reception, where I first felt a sense of belonging among dozens of passionate and curious young scientists.
Fig. 9: My booth at ETH
The morning was dedicated to setting up our booths. Piece by piece, the exhibition hall transformed into a vibrant space filled with prototypes, posters, and creative ideas. Once my own stand was ready, I finally had a moment to take in the atmosphere and to start the first conversations. In the afternoon, we were treated to a guided city tour through Zurich. Walking through the old streets, hearing stories about the city, and enjoying the fresh air was the perfect opportunity to get to know the other participants better.
Fig. 10: The Limmat (River in Zurich)Fig. 11: The Grossmünster church in Zurich
Later that day, alumni of Schweizer Jugend forscht visited the exhibition. For the first time, I had the chance to present my project outside of the jury context, and I was surprised by the interest and thoughtful questions I received.
By the time we arrived at our youth hostel late in the evening, the excitement of the day had fully caught up with me. Exhausted but exhilarated, I fell into bed.
Day 2
The second day began with breakfast at the youth hostel, followed by a short tram ride back to ETH Zurich. The morning program was dedicated to the jury sessions, which represented one of the most important parts of the entire competition. Unlike in the semifinals, where I just explained my project and was asked some general questions, this time I was able to discuss my project in detail with several experts – including those specializing in fields beyond my own topic.
Fig. 12: The ETH Main Hall filled with interesting projects
These conversations quickly turned into fascinating discussions. The jurors asked insightful questions, challenged certain assumptions, and encouraged me to think more deeply about the potential applications of my work. At the same time, I received a great deal of praise, which was both reassuring and motivating. It was incredibly rewarding to see that months of effort, refinement, and problem-solving were being recognized by experienced professionals.
In the afternoon, the doors of ETH opened to the public for the exhibition. Friends, family members, and curious visitors from outside the competition came to explore the stands. Presenting my project in this setting felt very different from the formal jury discussions of the morning – it was more relaxed, conversational, and filled with spontaneous questions. I especially enjoyed seeing how people unfamiliar with drone technology reacted to the project, and it gave me the chance to practice explaining complex ideas in a way that was accessible to everyone. After such a full day of interactions, we returned to the youth hostel in the evening. The atmosphere there was much calmer, as everyone tried to recharge a little energy in preparation for the final day.
Fig. 13: Me explaining my project to a friend of mine who came to visit me
Day 3
The final day once again began with our journey to ETH Zurich. In the morning, the exhibition hall opened its doors for a second round of public visits. This time, the experience was especially meaningful for me, as my family came to see my project in person.
After lunch, it was finally time for the highlight of the competition: the award ceremony. A live band set the stage, and soon the opening speeches began. The tension in the room was almost tangible – every participant knew that months, if not years, of work were culminating in this single event. I felt both nervous and excited, my heart beating faster with each passing moment.
Fig. 14: The start of the award ceremonyFig. 15: My nomination to ISEF 2026!
Then came an unexpected twist: even before the regular prizes and certificates were announced, the jury revealed the winners of the most prestigious special awards. To my immense joy, my name was called. I had been selected to represent Switzerland at the International Science and Engineering Fair (ISEF) 2026 in Phoenix, Arizona. The sense of relief, excitement, and pride I felt in that moment is difficult to describe – it was a dream come true.
The ceremony continued with an inspiring keynote by former NASA Director Thomas Zurbuchen, who shared his journey in science and reminded us of the importance of perseverance and never giving up.
Fig. 16: An inspring talk by Thomas ZurbuchenFig. 17: Me being awarded my distinction
Finally, the time came for the official certificates. One by one, every participant was called to receive their recognition. When my turn came, I was awarded the highest possible distinction: hervorragend (outstanding) honored with CHF 1500. The applause and congratulations that followed made the moment even more unforgettable.
The evening concluded with an apéro, where I had the chance to exchange thoughts with professors, fellow participants, and many guests. I was overwhelmed by the warm words of encouragement and congratulations I received for both my project and the recognition it had achieved.
After three exciting, inspiring, and at times exhausting days, it was finally time to return home – this time together with my parents, carrying not only my luggage but also an experience that I will cherish for a lifetime.
Last week, Bitcraze attended the BETT Show in London to get a better sense of how the education landscape is evolving.
BETT (British Educational Technology Show) brings together educators, edtech companies, curriculum developers, policymakers, and technology providers across the full spectrum of learning: from primary school to higher education and professional training.
For us, it was a valuable opportunity to listen and get an understanding of where the general EDU landscape is and where it is heading.
Meeting Familiar Faces, and New Ones
One of the most rewarding parts of the visit was reconnecting with existing partners already using the CrazyflieTM in educational settings, and meeting new potential collaborators: teachers building robotics programs, universities modernising their lab infrastructure, and organisations developing national STEM (Science, Technology, Engineering, and Mathematics) and STEAM (Science, Technology, Engineering, Art, and Mathematics) initiatives.
A recurring theme in many conversations was the need for platforms that are robust and safe to use in classrooms, scale from simple programming exercises to advanced autonomy and AI, support both structured teaching and open-ended experimentation, and are well documented (both for the teacher and for the student).
These are exactly the problems we have spent more than a decade working on.
What the Education Robotics Market Looks Like Today
Speaking with a wide range of robotics vendors, software providers, and solution integrators gave us a clearer picture of the realities of the K-12 and STEM market:
Procurement is often tender-based and highly structured
Budgets are tight and price sensitivity is real
There are many vendors offering similar-looking robotics kits
Hardware is physically robust and classroom-proof and safety is critical
Programming is dominated by Python, Scratch, Blockly, or proprietary visual tools
“AI-enabled” frequently means GPT-style programming blocks layered on top
LEGO compatibility is everywhere
micro:bit has effectively become a compelling entry-level control board
Buyers apply hard scrutiny to educational value and learning outcomes
Real adoption requires curricula, lesson plans, and teacher training programs
And in practice, U.S.-developed curricula often transfer reasonably well globally
Why the Crazyflie is a Great Fit for Education
Although the Crazyflie originated as a research platform, its characteristics map naturally to education:
STEM / STEAM (Upper Secondary & High School)
Students can work hands-on with control systems, sensors, wireless communication, programming, and basic AI in a physical system they can see, debug, and iterate on. It makes abstract concepts tangible.
Undergraduate Education
Crazyflie is increasingly used in robotics, embedded systems, and mechatronics courses to teach estimation, control, perception, and multi-agent systems without the overhead of large and expensive hardware.
Post-graduate Research
This remains our strongest domain: swarm robotics, learning-based control, human–robot interaction, indoor navigation, and distributed systems.
The continuity matters. Students don’t outgrow the platform. They grow with it. And, more importantly, the same openness that researchers value is increasingly relevant in education as well (particularly relevant in the light of recent geopolitical movements). Institutions want transparency, long-term maintainability, and the freedom to adapt tools to their pedagogy and not just consume closed kits.
Education is a Strategic Part of the Robotics Ecosystem
BETT confirmed that education is a strategic and structured part of the robotics ecosystem. Not just as “learning about robots”, but as a way to train future engineers, researchers, and system designers using realistic platforms from an early age.
Succeeding in this segment requires more than good hardware. It requires thoughtful packaging, clear educational positioning, proper teaching material, partner ecosystems, and long-term commitment.
To those we met at BETT, thank you for the conversations. And if you are working with STEM, STEAM, or robotics education and are curious about the Crazyflie, we are always happy to talk.
Since the end of 2024, we’ve been putting effort into spreading out our manufacturing. With international trade rules rapidly changing, it felt like the right moment to expand our production footprint. Doing this helps us keep stock more stable, react faster to demand, and makes life easier for you when it comes to potential import-related costs.
To make it happen, we’ve been working closely with our long-time partner in China, Seeed Studio. They’ve been helping us move the production of some of our items to Vietnam, where exciting new opportunities have opened up. This way, we can keep the same quality and reliability you’re used to while spreading out production across more locations, which makes our supply chain stronger.
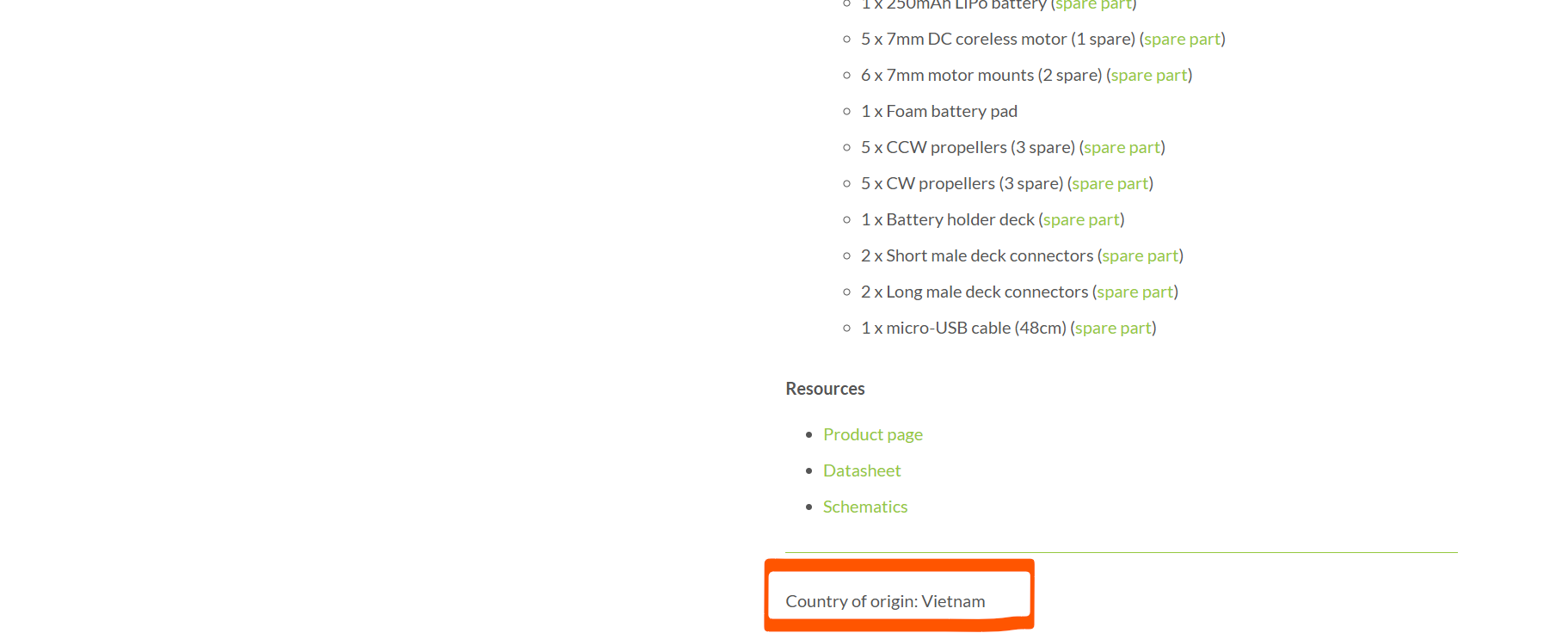
Right now, four of our products are being made in Vietnam: the Crazyflie 2.1+, the Crazyflie 2.1 Brushless, the Flow Deck, and the Crazyradio 2.0. Meanwhile, the Charging Dock is made here in Sweden, and the Lighthouse Base Station comes from Taiwan. That means our production is now spread over four different locations!
We still produce in China as well—that’s where our newest deck will come from, for example. The plan is to gradually add more products made in Vietnam, spreading production across locations, reduce risk, and keep things running smoothly for both us and you. Over time, this will make it easier to maintain stock, respond quickly to demand, and give you a smoother experience no matter where you are in the world.
We also want to make it visible where your products come from when you shop with us. In May, we updated the store to clearly display the country of origin for each item. You can now find this information at the bottom of every product page, so you always know where the item in your cart is being made. For many of you, this small detail helps plan ahead and makes it easier to estimate any extra costs from international shipping.
It’s been a while since our last update on what started as the High powered LED deck prototype. We have finally had time to push this project forward and are aiming to have a release at the beginning of 2026.
A New Name and a Familiar Design
You might notice that the deck has a new name, something simpler and a bit catchier, the Color LED deck (bottom-mounted and top-mounted). The overall design and specs, however, remain very similar to the original concept:
Using a highly efficient high powered LED for maximum brightness
DC/DC driving circuitry for improved efficiency and consistent performance
A light diffuser for smooth, even illumination and wide visibility
Two versions, top or bottom mounted, depending on your build
The Color LED Deck brings fully programmable lighting to your Crazyflie, allowing you to create and control custom light patterns in real time. It’s useful for flying in darker environments, for visual tracking experiments, or for adding synchronized light effects in drone choreography. The deck is now also compatible with the Crazyflie 2.1 Brushless, bringing dynamic lighting to our most recent platform for the first time.
Software architecture
This deck will also be the first to use the new DeckCtrl architecture. If you’re curious about how that works, you can read more about it in this earlier blog post.
The Color LED deck has some intelligence built into it that runs on a STM32C0 MCU. The open-source firmware is still under development, and the repository can be found here.
Availability
The final pricing is still being determined, but make sure to sign up for the in-stock notification at the Color LED deck store pages (bottom-mounted and top-mounted) to get an update as soon as it’s available. And as always, keep an eye on the blog for more updates as we get closer to release.
Debugging the Crazyflie using the debug-adapter kit gives you direct access to the STM32 with a hardware debugger. It makes it possible to pause execution, step through code, and inspect what’s happening in real time.
Even if you’re working mostly at a higher level, having this kind of visibility can be a huge time-saver when something unexpected happens. It’s a tool I use frequently when tracking down firmware issues or verifying low-level behavior.
We already have documentation for debugging the STM32 on the Crazyflie using ST-LINK and VS Code, but there are still a few missing pieces; like how to use J-Link, how to debug other platforms (like the Crazyflie 2.1 Brushless), and how enabling debug builds can help.
Debug Build
If you’re debugging and your breakpoints aren’t landing where you expect, or stepping seems unpredictable, or variables aren’t visible, it’s probably because the firmware was built with compiler optimizations enabled. When you select a debug build, the build system disables optimization by setting the compiler flag -O0, which preserves line-by-line correspondence between source code and machine instructions. This makes stepping and inspecting variables much more reliable.
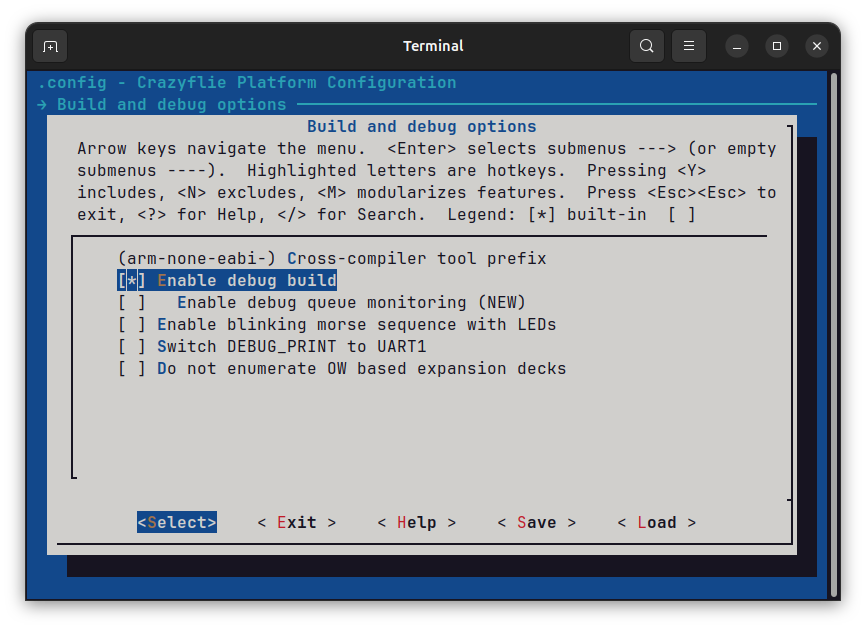
To enable a debug build, you need to set the CONFIG_DEBUG option in your Kconfig configuration. You can do this, for example, by running make menuconfig in a terminal. Then navigate to Build and debug options and select Enable debug build. After changing Kconfig options, re-run make to rebuild the firmware with the new configuration.
Enabling debug build Kconfig option through menuconfig
VS Code Debug Configuration
With debug builds enabled, you’ll get more predictable stepping and reliable breakpoints. The next step is setting up your debugger. Below is a launch.json configuration for VS Code that supports both ST-Link and J-Link, and works with Crazyflie 2.x and the 2.1 Brushless.
To use this setup with a different platform, like the Flapper, just change the executable field to point to the correct .elf file. By default, starting a debug session in VS Code will erase and reflash the firmware, so make sure the firmware is built beforehand. If you need to attach to a running target without flashing, you’ll need to modify the launch.json to skip loading the binary.
A couple of weeks ago, we were at ICRA 2025 in Atlanta. This year’s ICRA drew over 7,000 attendees, making it the biggest edition yet. We had a booth at the exhibition where we showed our decentralized swarm demo. The setup included a mix of Crazyflie 2.1+ units with Qi charging decks and Crazyflie 2.1 Brushless platforms with our new charging dock. The entire swarm operated onboard, with two Lighthouse base stations for positioning. More details about the setup can be found in the recent swarm demo blog post.
8 Crazyflies flying simultaneously in our decentralized swarm at ICRA 2025
Some of the brushless drones carried our high-powered LED deck prototype to make the swarm more visible and engaging. One of the drones also had a prototype camera streaming deck, which held up well despite the busy wireless environment.
A Different Perspective
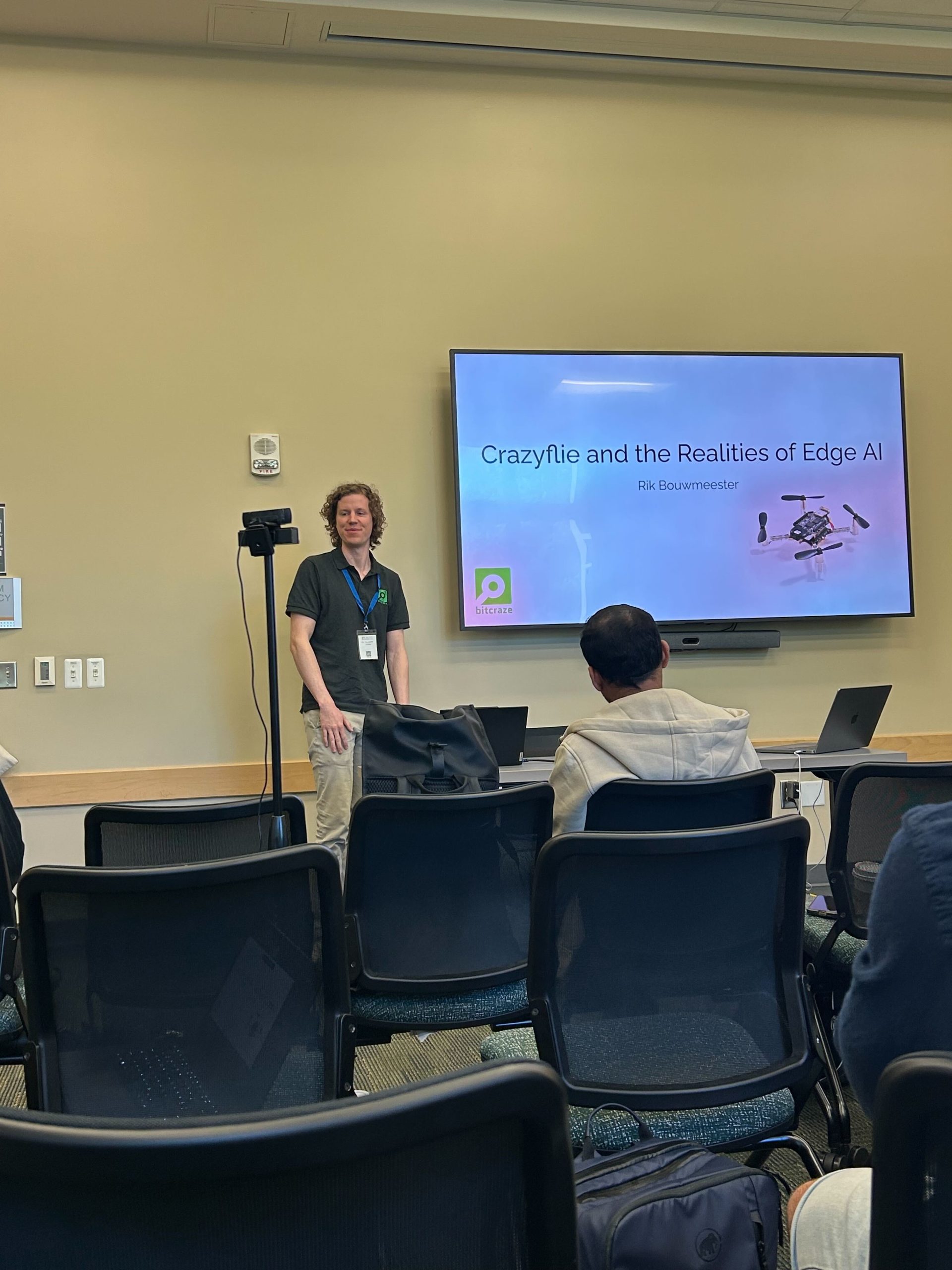
This year we were also invited to participate in a workshop: 25 Years of Aerial Robotics: Challenges and Opportunities, where I (Rik) gave a short presentation about the evolution of positioning in the Crazyflie, from webcam-based AruCo marker tracking to the systems we use today.
Usually, we spend most of our time on the exhibition floor, so being part of a workshop like this was a different experience. It was interesting to hear researchers mention the Crazyflie in their work without needing to explain what it is. That kind of familiarity isn’t something we take for granted, and it was nice to see.
Many thanks to all the participants of the workshop '25 Years Of Aerial Robotics: Challenges And Opportunities' that we had the pleasure to co-organise for #ICRA2025. The speakers, young researchers, chairpersons and, of course, the attendees all made it a unique experience🦾 pic.twitter.com/WNfUUYLtop
The workshop also gave us a chance to talk with both established researchers and newer faces in the field. What stood out most was hearing how people are using the Crazyflie in their work today. It’s very rewarding to see how what we do at the office connects with and supports real research.
Catching Up and Looking Around
One of the most rewarding parts of the conference was the chance to connect directly with people using the platform. We talked to many users, both current and past, and saw new research based on the platform. It was also great to reconnect with Flapper Drones, who build flapping-wing vehicles powered by the Crazyflie Bolt. And it was nice to see HopTo on the exhibition floor for the first time. The company is a spin-off from the Robotics and Intelligent Systems Lab at CityU Hong Kong, which published a Science Robotics paper on the hopcopter concept that used a Crazyflie. We also had the chance to catch up with a maintainer of CrazySim, an open-source simulator in the Crazyflie ecosystem. It’s always valuable to connect with people building on top of the platform, whether through research, hardware, or open-source tools.
Wrapping Up
ICRA 2025 was packed with activity. From demoing the swarm, to the workshop, to hallway conversations, it gave us a lot of valuable feedback and insight. Thanks to everyone who stopped by, joined a talk, or came to say hello.
As we mentioned in a previous blog post, the last couple of weeks have been full of exciting events in the US. We first began our adventure in Charlotte, North Carolina, where we attended the International Conference on Unmanned Aircraft Systems (ICUAS), as platinum sponsors.
We were especially thrilled to be involved because the final stage of the conference’s competition featured Crazyflies, which played a central role in the challenge.
The ICUAS UAV Competition
This year’s competition simulated a search mission in an urban environment. The goal was for teams to identify ArUco markers placed on multiple obstacles, while maintaining line-of-sight and communication among a swarm of three Crazyflies.
Each team’s UAVs launched from a designated base, navigated a known environment, and attempted to locate several targets. The drones relied on an OptiTrack system for positioning and used the AI deck as a camera for image recognition. Constant communication between the base and all UAVs was required throughout the mission.
The event, organized by the LARICS team, combined both simulation and real-world implementation. Their hard work ensured that competitors could smoothly transition their systems from digital models to actual flying drones. What followed was an intense and fun two-day hackathon.
Although the ICUAS UAV Competition drew interest from 26 teams globally, only five finalist teams made it to Charlotte to run their scenarios with real drones. In the end, it was Team Aerial Robotics from the Indian Institute of Technology Kanpur (IITK) who took home first place—congratulations to them!
While the event went smoothly overall, some communication challenges cropped up—solved creatively by placing a radio in the center of the arena. Battery management was also key, with fully charged packs being a hot commodity to maximize flight time.
Research and Presentations
Alongside the competition, the conference featured a wide range of research presentations. We were proud to see Rik present on the AI deck during a workshop focused on embodied AI.
One of the highlights was the Best Paper Award, which—although we missed the talk, was awarded to a team from Queen’s university using the Crazyflie to simulate drone landings on ocean waves. You can read their fascinating paper here: https://arxiv.org/abs/2410.21674
Final Thoughts
Overall, ICUAS 2025 was a great experience—full of innovation, collaboration, and of course, plenty of flight time. We’re grateful to the organizers, competitors, and everyone who stopped by our booth. Until next time!
This week, some of us are on an adventure! Marcus and Tobias will be exploring both the RIG and Embedded World fairs.
RIG showcases the latest innovations in robotics and intelligent systems, while Embedded World is the place to be for cutting-edge embedded technologies. Both events promise amazing demos, insightful talks, and a chance to catch up with some of our collaborators.
Planning to attend either fair? Let’s meet up! We’d love to explore the exhibitions together, chat about cool technologies, or just geek out about the innovations on display. We’ll be wandering through Embedded World on Thursday and hitting RIG on Friday. Send us an email if you’d like to connect – we’re always up for grabbing coffee!
Next May in Atlanta
After our adventures as visitors, we’re thrilled to announce that we’ll be exhibiting at the International Conference on Robotics and Automation (ICRA) 2025! Stop by our booth where we’ll be showcasing our latest demo. We’ll be, as always, available to discuss our newest products, answer your technical questions, and provide insights into how our solutions can transform your robotics applications. We’re also eager to hear your thoughts on what you’d like to see in our upcoming products. Mark your calendars and make sure to find us at Booth #131 – we may even have some presentations in the work, but nothing confirmed yet.
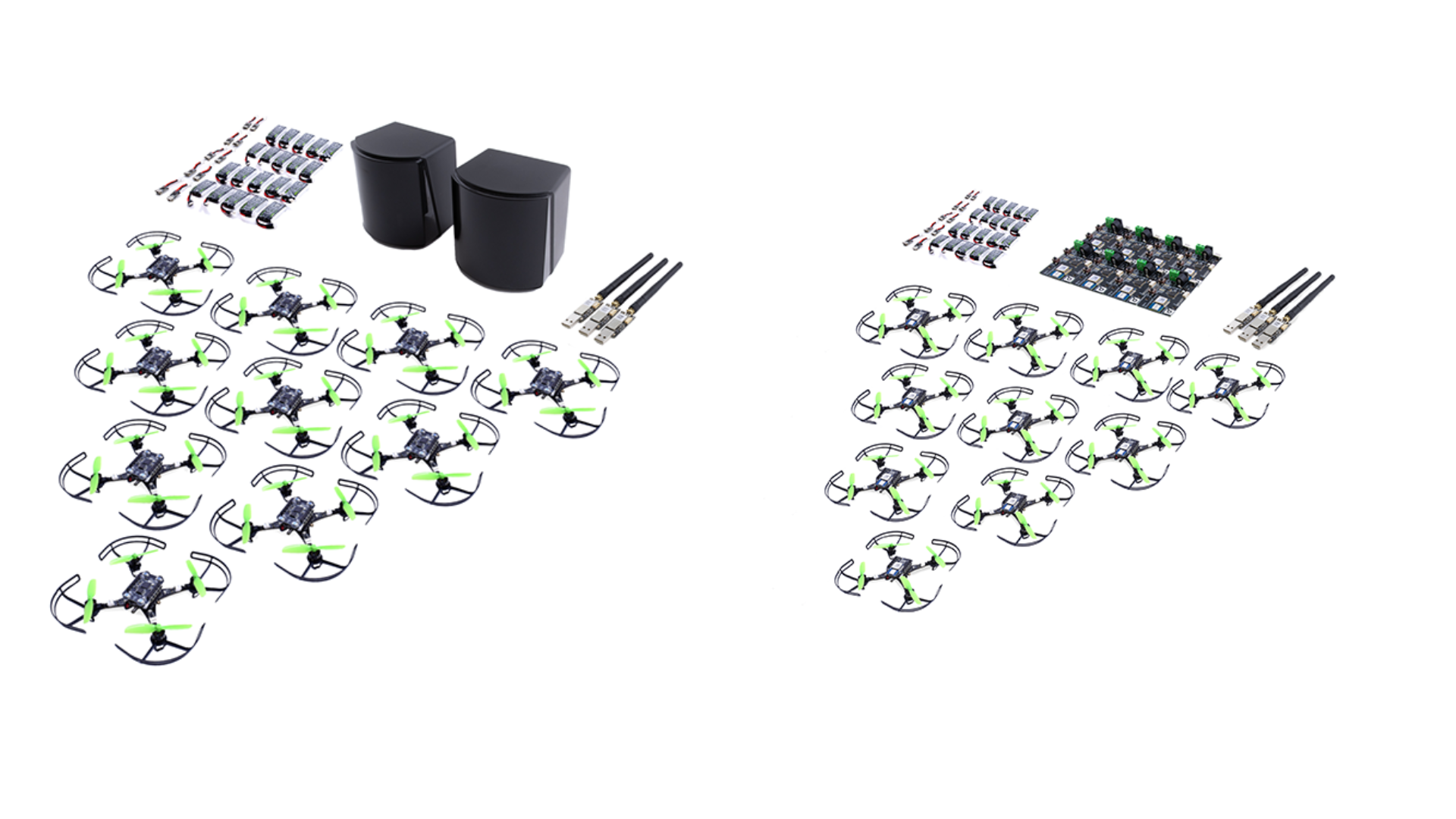
Today in the shop
And, last but not least, the Brushless is now available in a Swarm configuration! Both the Lighthouse Swarm bundle and Loco Swarm bundle have been added to our shop. These new bundles feature all the same components as our standard Swarm packages, but come equipped with the Crazyflie 2.1 Brushless instead of the Crazyflie 2.1+ model.