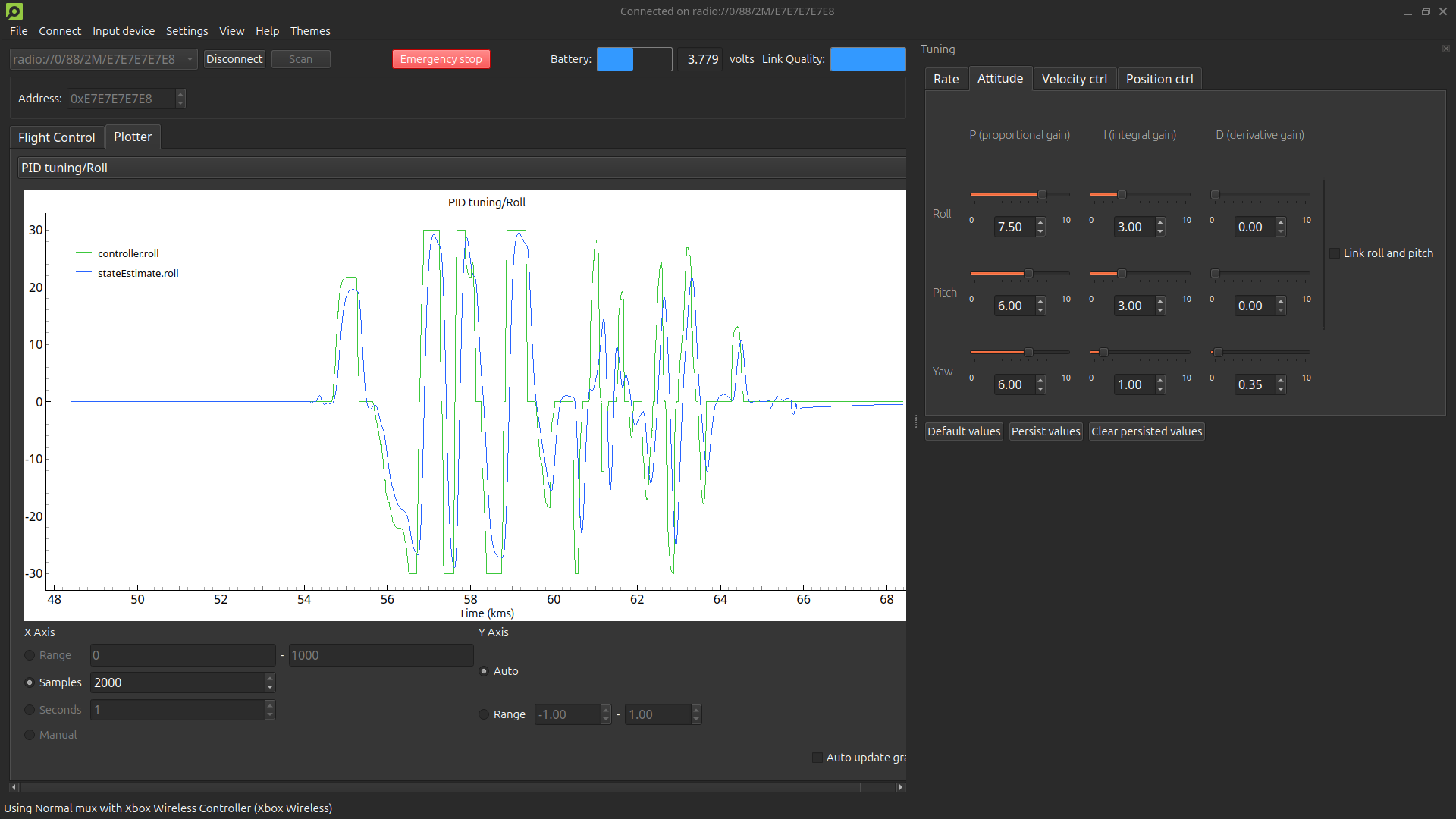
We are excited to announce the release of our new PID Tuning Guide! This guide is designed to help users understand and apply the basics of PID tuning within our ecosystem, making it easier to achieve stable and responsive flight for your Crazyflie. This guide is particularly useful if you’ve modified your drone, such as adding expansion decks or changing its motor and/or propeller configuration. While our default tuning is designed to work in a wide range of situations and configurations, fine-tuning your PID settings can enhance performance for your specific setup and flight profile.
Interface with tuning toolbox and plotter displaying the roll angle setpoint and the roll angle state estimate.
What’s in the guide?
The guide covers essential topics, including:
Fundamental PID Concepts: Understand the role of Proportional, Integral, and Derivative parameters in controlling your Crazyflie’s movements.
Step-by-Step Instructions: Learn how to set up your software, and use cfclient for tuning.
Practical Tuning Tips: Get insights on adjusting PID gains, using the tuning toolbox, and conducting safe manual flight tests.
Why this guide is useful
Even though this guide focuses on the basics, it provides a solid foundation for anyone new to PID tuning. Whether you’re using the Crazyflie 2.1, Crazyflie 2.0, or a custom-built quadcopter with the Crazyflie Bolt, this guide will help you:
Understand how PID controllers work and why they are important.
Use the cfclient for PID tuning within our ecosystem.
Safety first
We prioritize safety in our guide. Always secure your quadcopter in a safe environment, use protective gear, and configure an emergency stop on your controller to ensure a safe tuning process.
Get started with PID tuning today!
Ready to improve your quadcopter’s flight performance? Check out our PID Tuning Guide and start tuning.
For the upcoming Crazyflie 2.1 brushless we developed, together with a leading motor manufacturing brand, a brushless 08028 motor, targeting high quality and high efficiency. The 08 – stator size motors are usually optimized for high power output, to serve the FPV market, but we where aiming for high efficiency. This means fitting maximum amount of copper around the stator, lowering KV, thin stator lamination sheets and high quality dual ball-bearings.
Specification
Stator size: 08028 (8.4mm x 2.8mm)
Stator lamination sheets: 0.2mm
Motor KV: 10000
Internal resistance: 0.52 Ohm
Weight: 2.4g
Dual ball-bearing design, using high quality NSK or NMB brands.
1 mm shaft, 5 mm length
Matching propeller: Bitcraze 55-35mm
Peak current 1.8A, peak power 7.2W -> 30g thurst @ 4V (using 55-35)
Rated voltage: 4.2V
Together with the bitcraze 55-35 mm propeller we manage to achieve a system efficiency of over 5 W/g during hover, not to shabby. As a reference, FPV setups normally achieve around 2 W/g. This will bring the hover time for the Crazyflie 2.1 brushless, in the barebone configuration, a bit over 10 minutes.
A few weeks ago, the prestigious Robotics: Science and Systems (RSS) conference was held at Delft University of Technology. We helped with the co-organization of a half-day tutorial and workshop called “Aerial Swarm Tools and Applications” so Kimberly (I) was there on behalf of both Bitcraze and Crazyswarm2. In this blog post, we will tell you a bit about the conference itself and the workshop (and perhaps also a tiny bit about RoboCup)
The Robotics: Science and Systems conference
The Robotics: Science and Systems conference, also known as RSS, is considered one of the most important robotics conferences to attend, alongside ICRA and IROS. It distinguishes itself by having only a single track of presented papers, which makes it possible for all attendees to listen to and learn about all the cool robotics work done in a wide range of fields. It also makes it more difficult to get a paper accepted due to the fixed number of papers they can accept, so you know that whatever gets presented is of high quality.
This year the topic was very much on large language models (LLMs) and their application in robotics, most commonly manipulators. Many researchers are exploring the ways that LLMs could be used for robotics, but that means not a lot of small and embedded systems were represented in these papers. We did find one paper where Crazyflies were presented, namely the awesome work by Darrick et al. (2024) called ‘Stein Variational Ergodic Search’ which used optimal control for path planning to achieve the best coverage.
It gave us the chance to experience many of the other works that could be found at RSS. One in particular was about the robotic design of the cute little biped from Disney Imagineering named “Design and Control of a Bipedal Robotic Character” by Grandia et al. (2024). Also very impressive was the Agile flight demo by the group of Davide Scaramuzza, and we enjoyed listening to the keynote by Dieter Fox, senior director at Nvidia, talking about ‘Where is RobotGPT?’. The banquet location was also very special, as it was located right in the old church of Delft.
The main reason we joined RSS was that we were co-organizing the workshop ‘Aerial Swarm Tools and Applications’. This was done in collaboration with Wolfgang Hönig from Crazyswarm2/TU Berlin, Miguel Fernandez Cortizas and Rafel Perez Segui from Aerostack2/Polytechnic University of Madrid (UPM), and Andrea Testa, Lorenzo Pichierri, and Giuseppe Notarstefano from CrazyChoir/University of Bologna. The workshop was a bit of a hybrid as it contained both talks on various aerial swarm applications and tutorials on the different aerial swarm tools that the committee members were representatives of.
Photos of the Aerial Swarm Tools and Applications workshop
Sabine Hauert from the University of Bristol started off the workshop by talking about “Trustworthy swarms for large-scale environmental monitoring.” Gábor Vásárhelyi from Collmot Robotics and Eötvös University gave a talk/tutorial about Skybrush, showing its suitability not only for drone shows but also for research (Skybrush was used for the Big Loco Test show demo we did 1.5 years ago). The third speaker was SiQi Zhou, speaking on behalf of Angela Schöllig from TU Munich, discussing “Safe Decision-Making for Aerial Swarms – From Reliable Localization to Efficient Coordination.” Martin Saska concluded the workshop with his talk “Onboard relative localization for agile aerial swarming in the wild” about their work at the Czech TU in Prague. They also organize the Multi-robot systems summer school every year, so if you missed it this year, make sure to mark it in your calendar for next summer!
We had four tutorials in the middle of the workshop as well. Gábor also showed Skybrush in simulation after his talk for participants to try out. Additionally, we had tutorials that included real, flying Crazyflies live inside the workshop room! It was a bit of a challenge to set up due to the size of the room we were given, but with the lighthouse system it all worked out! Miguel and Rafael from Aerostack2 were first up, showing a leader-follower demo. Next up were Wolfgang and Kimberly (Crazyswarm2) who showed three Crazyflies collaboratively mapping the room, and finally, Andrea and Lorenzo from CrazyChoir demoed formation control in flight.
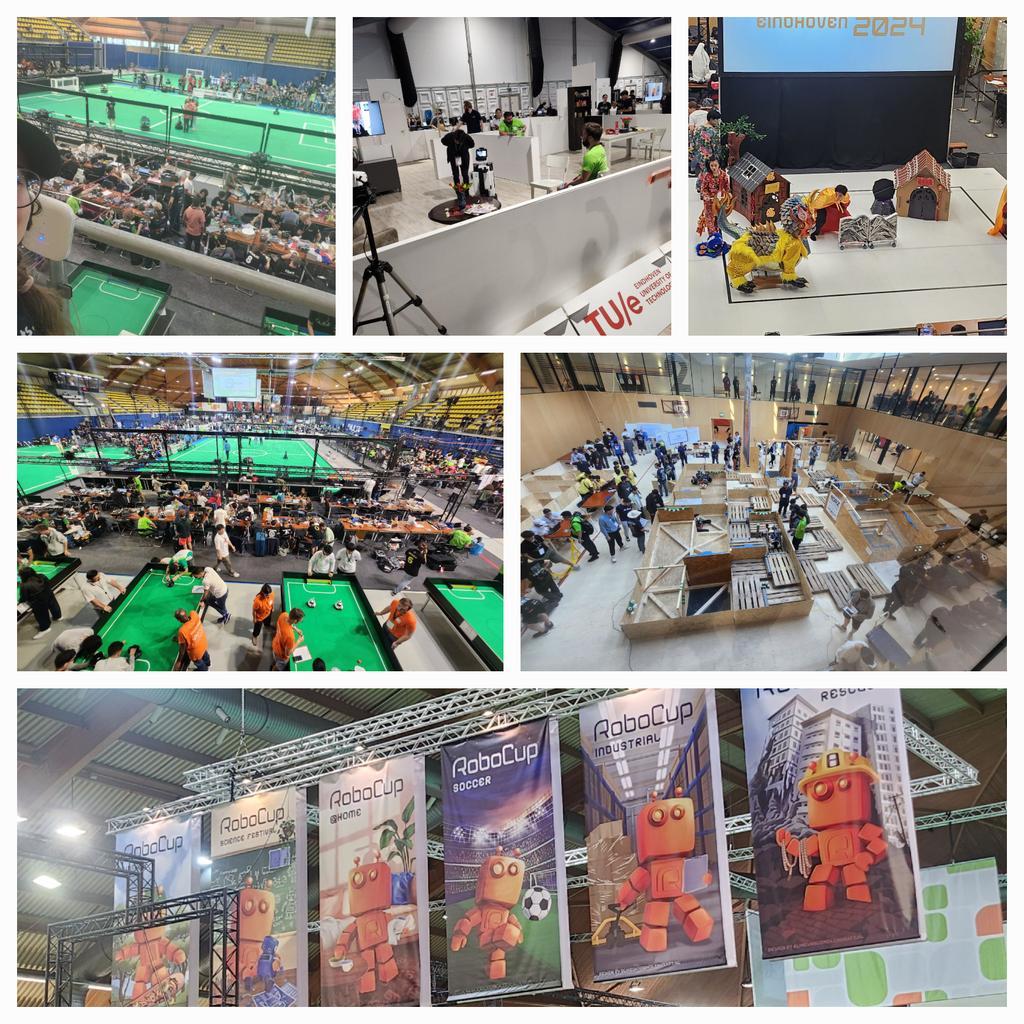
Luckily, there was also a bit of time to visit Eindhoven for a field trip to the 2024 edition of the world championship competitions of RoboCup! This is a very large robotics competition held in several different divisions, namely Soccer (with many subdivisions), Industrial, Rescue, @Home, and Junior. Each country usually has its own national championships, and those that win there can compete in the big leagues at events like these. RoboCup was extremely fun to attend, so if any robotics enthusiasts happen to live close to one of these, go! It’s awesome.
Photos of the field trip to RoboCup
Maybe drone competitions might be one of RoboCup’s divisions in the future :)
This week, we have a guest blog post from Scott at Droneblocks.
DroneBlocks is a cutting-edge platform that has transformed how educators worldwide enrich STEM programming in their classrooms. As pioneers in the EdTech space, DroneBlocks wrote the playbook on integrating drone technology into STEM curriculum for elementary, middle, and high schools, offering unparalleled resources for teaching everything from computer science to creative arts. What started as free block coding software and video tutorials has become a comprehensive suite of drone and robotics educational solutions. The Block-Coding software still remains free to all, as the DroneBlocks mission has always been to empower educators and students, allowing them to explore and lead the way. This open-source attitude set DroneBlocks on a mission to find the world’s best and most accessible micro-drone for education, and they found it in Sweden!
Previously, DroneBlocks had worked alongside drone juggernaut DJI and their Tello Drone. The Tello was a great tool for its time, but when DJI decided to discontinue it with little input from its partners and users, it made the break much easier. The hunt began for a DJI Tello replacement and an upgrade!
Bitcraze’s choice to build Crazyflie as an open platform had their drone buzzing wherever there was curiosity. The Crazyflie was developed to fly indoors, swarm, and be mechanically simplistic. DroneBlocks established that the ideal classroom micro-drone required similar characteristics. This micro-drone needed to be small for safety but sturdy for durability. It also needed to be easy to assemble and simple in structure for students new to drones. Most importantly, the ideal drone needed to have an open line of software communication to be fully programmable. Finally, there had to be an opportunity for a long-lasting partnership with the drone manufacturer, including government compliance.
After extensive searching and testing by DroneBlocks, the Crazyflie was a diamond in the rough – bite-sized and lightweight, supremely agile and accurate, reliable and robust, and most importantly, it was an open-source development platform. The DroneBlocks development team took the Crazyflie for a spin (or several) and with excitement, it was shared with the larger curriculum team to be mined for learning potential. It was promising to see Crazyflie’s involvement in university-level research studies, which proved it meant business. DroneBlocks knew the Crazyflie had a lot going for it – on its own. The team imagined how, when paired with DroneBlocks’ Block Coding software, Flight Simulator, and Curriculum Specialists, the Crazyflie could soar to atmospheric heights!
Hardware? Check. Software? Check. But what about compatibility? DroneBlocks was immediately drawn to the open communication and ease of conversation with the Bitcraze team. It was obvious that both Bitcraze and DroneBlocks were born from a common thread and shared a mutual goal: to empower people to explore, investigate, innovate, research, and educate.
DroneBlocks has since built a new Block Coding interface around the Crazyflie, allowing students to pilot their new drone autonomously and learn the basics of piloting and coding concepts. This interface is offered with a brand new drone coding simulator environment so students can test their code and fly the Crazyflie in a virtual classroom environment.
The Crazyflie curriculum currently consists of courses covering building, configuring, and finally, programming your drone with block coding (DroneBlocks) and Python. DroneBlocks’ expert curriculum team designed these courses to enable learners of all ages and levels to learn step by step through video series and exercises. New courses around block coding and Python are in constant development and will be continuously added to the DroneBlocks curriculum platform.
Crazyflie Drones now headline DroneBlocks’ premiere classroom launch kit. The DroneBlocks Autonomous Drones Level II kit encompasses everything a middle or high school would need to launch a STEM drone program, including the hardware, necessary accessories, and safety wear paired with the DroneBlocks software and curriculum. As a result, thousands of new students have entered the world of Drones and programming thanks to the Bitcraze + DroneBlocks partnership.
DroneBlocks has become an all-inclusive drone education partner for engaging and innovative learning experiences—and the Crazyflie delivers this by being a cutting-edge piece of hardware in a clever package.
Today we welcome Sam Schoedel and Khai Nguyenfrom Carnegie Mellon University. Enjoy!
We’re excited to share the research we’ve been doing on model-predictive control (MPC) for tiny robots! Our goal was to find a way to compress an MPC solver to a size that would fit on common microcontrollers like the Crazyflie’s STM32F405 while being fast enough to control the higher frequency dynamics of smaller robots. We came up with a few tricks to make that happen and dubbed the resulting solver TinyMPC. When it came time for hardware experiments, using the Crazyflie just made sense. A tiny solver deserves a tiny robot.
Motivation
Model predictive control is a powerful tool for controlling complex systems, but it is computationally expensive and thus often limited to use cases where the robot can either carry enough computational power or when offboard computing is available. The problem becomes challenging to solve for small robots, especially when we want to perform all of the computation onboard. Smaller robots have inherently faster dynamics which require higher frequency controllers to stabilize, and because of their size they don’t have the capacity to haul around as much computational power as their larger robot counterparts. The computers they can carry are often highly memory-constrained as well. Our question was “how can we shrink the computational complexity and memory costs of MPC down to the scale of tiny robots?”
What We Did
We settled on developing a convex model predictive control solver based on the alternating direction method of multipliers. Convex MPC solvers are limited to reasoning about linear dynamics (on top of any other convex constraints), but have structure that TinyMPC exploits to solve problems efficiently. The tricks we used to achieve this efficiency are described in the paper, but it boils down to rewriting the problem as a constrained linear-quadratic regulator to reduce the memory footprint and then precomputing as many matrices as possible offline so that online calculations are less expensive. These tricks allowed us to fit long-time horizon MPC problems on the Crazyflie and solve them fast enough for real-time use.
What TinyMPC Can Do
We decided to demonstrate the constraint-handling capabilities of TinyMPC by having the Crazyflie avoid a dynamic obstacle. We achieved this by re-computing hyperplane constraints (green planes in the first video) about a spherical obstacle (transparent white ball) for each knot point in the trajectory at every time step, and then by solving the problem with the new constraints assuming they stayed fixed for the duration of the solve.
In the two videos below, the reference trajectory used by the solver is just a hover position at the origin for every time step. Also, the path the robot takes in the real world will never be exactly the same as the trajectory computed by the solver, which can easily result in collisions. To avoid this, we inflated the end of the stick (and the simulated obstacle) to act as a keep-out region.
TinyMPC is restricted to reasoning about linear dynamics because of its convex formulation. However, a simple linearization can be taken pretty far. We experimented with recovering from different starting conditions to push the limits of our linear Crazyflie model and were able to successfully recover from a 90 degree angle while obeying the thrust commands for each motor.
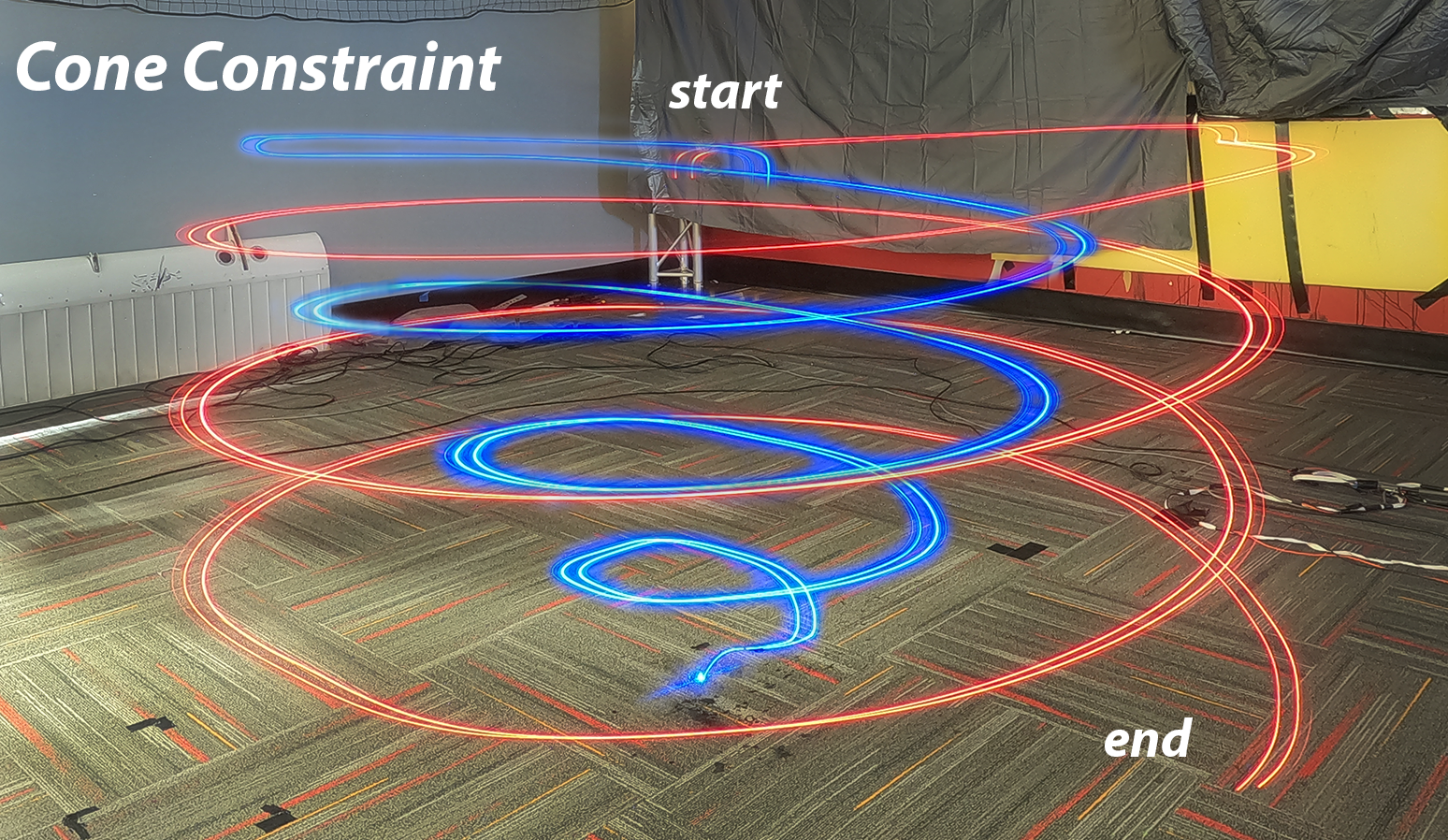
We recently added support for second-order cone constraints as well. These types of constraints allow TinyMPC to reason about friction and thrust cones, for example, which means it can now intelligently control quadrupeds on slippery surfaces and land rockets. To clearly demonstrate the cone constraint, we took long exposure photos of the Crazyflie tracking a cylindrical landing trajectory without any cone constraints (red) and then with a spatial cone constraint that restricts the landing maneuver to a glide slope (blue).
How To Use TinyMPC
All of the information regarding the solver can be found on our website and GitHub org (which is where you can also find the main GitHub repository). TinyMPC currently has a Python wrapper that allows for validating the solver and generating C++ code to run on a robot, and we have a few examples in C++ if you don’t want to use Python. Our website also explains how to linearize your robot and has some examples for setting up the problem with a linear model, solving it an MPC loop, and then generating and running C++ code.
Most importantly to the Crazyflie community, our TinyMPC-integrated firmware is available and should work out of the box. Let us know if you use it and run into issues!
Our accompanying research papers:
Khai Nguyen, Sam Schoedel, Anoushka Alavilli, Brian Plancher, and Zachary Manchester. “TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers.” arXiv preprint arXiv:2310.16985 (2023). https://arxiv.org/pdf/2310.16985
Sam Schoedel, Khai Nguyen, Elakhya Nedumaran, Brian Plancher, and Zachary Manchester. “Code Generation for Conic Model-Predictive Control on Microcontrollers with TinyMPC.” arXiv preprint arXiv:2403.18149 (2024). https://arxiv.org/pdf/2403.18149
We would love your feedback and suggestions, and let us know if you use TinyMPC for your tiny platforms!
Whenever we show the Crazyflie at our booth at various robotics conferences (like the recent ICRA Yokohama), we sometimes get comments like ‘ahh that’s cute’ or ‘that’s a fun toy!’. Those who have been working with it for their research know differently, but it seems that the general robotics crowd needs a little bit more… convincing! Disregarding its size, the Crazyflie is a great tool that enables users to do many awesome things in various areas of robotics, such as swarm robotics and autonomy, for both research and education.
We will be showing that off by giving a live tutorial and demonstration at the Robotics Developer Day 2024, which is organized by The Construct and will take place this Friday, 5th of July. We have a discount code for you to use if you want to get a ticket; scroll down for details. The code can be used until 12 am midnight (CEST) on the 2nd of July.
The Construct and Robotics Developer Day 2024
So a bit of background information: The Construct is an online platform that offers various courses and curriculums to teach robotics and ROS to their users. Along with that, they also organize all kinds of live training sessions and events like the Robotics Developer Day and the ROS Awards. Unfortunately, the deadline for voting in the latter has passed, but hopefully in the future, the Crazyflie might get an award of its own!
What stands out about the platform is its implementation of web-based virtual machines, called ‘ROSJects,’ where ROS and everything needed for it is already set up from the start. Anyone who has worked with ROS(2) before knows that it can be a pain to switch between different versions of ROS and Gazebo, so this feature allows users to keep those projects separate. For the ROS Developer Day, there will be about five live skill-learning sessions where a ROSject is already preconfigured and set up for the attendees, enabling them to try the tutorial simultaneously as the teacher or speaker explains the framework.
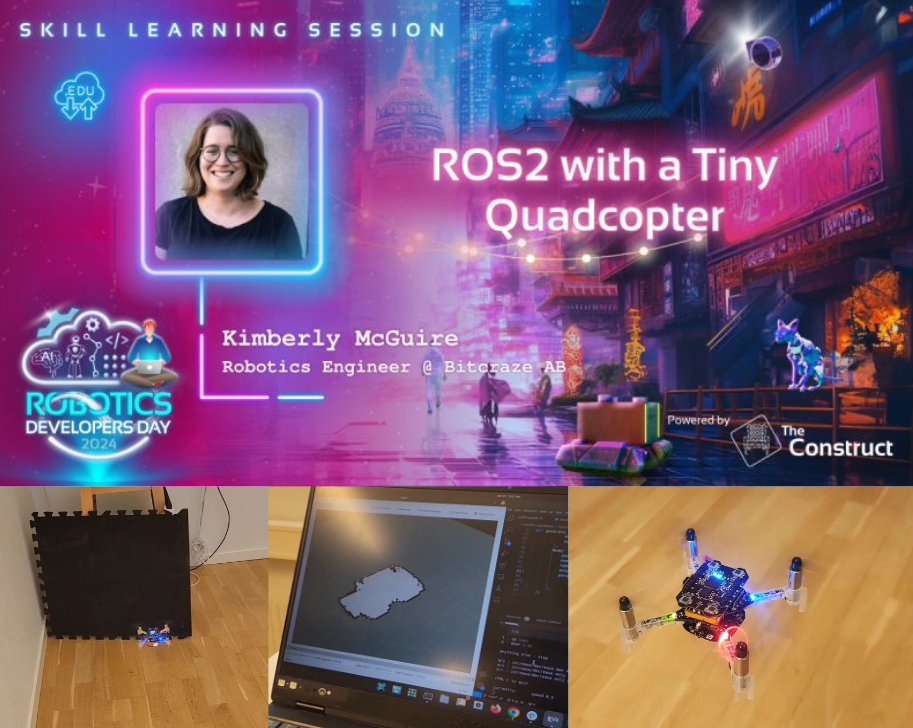
Skill learning session with the Crazyflie
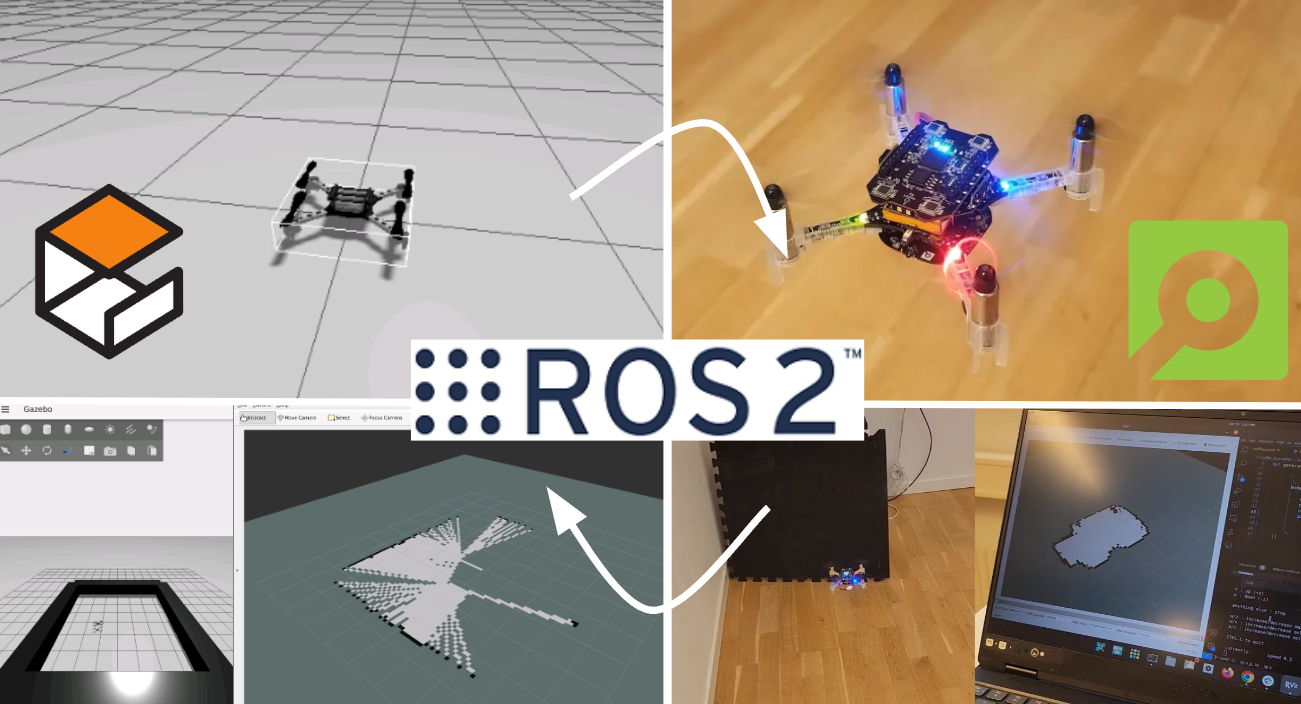
One of the earlier mentioned skill learning sessions is, of course, one with the Crazyflie! The title is “ROS 2 with a Tiny Quadcopter,” and it is currently planned to be the first skill learning session of the event, scheduled at 15:15 (3:15 pm) CEST. The talk will emphasize the use of simulation in the development process with aerial robotics and iterating between the real platform and the simulated one. We will demonstrate this with a Crazyflie 2.1 equipped with a Lighthouse deck and a Multi-ranger deck. Moreover, it will also use a Qi-charging deck on a charging platform while it patiently waits for its turn :D
What we will be showing is a simple implementation of a mapping algorithm made specifically for the Crazyflie’s Multiranger deck, which we have demonstrated before at ROSCon Kyoto and in the Crazyswarm2 tutorials. What is especially different this time is that we are using Gazebo for the simulation parts, which required some skill learning on our side as we have been used to Webots over the last couple of years (see our tutorial for that). You can find the files for the simulation part in this repository, but we do advise you to follow the session first.
You can, if you want, follow along with the tutorial using a Crazyflie yourself. If you have a Crazyflie, Crazyradio, and a positioning deck (preferably Lighthouse positioning, but a Flowdeck would work as well), you can try out the real-platform part of this tutorial. You will need to install Crazyswarm2 on a separate Ubuntu machine and add a robot in your ROSject as preparation. However, this is entirely optional, and it might distract you from the cool demos we are planning to show, so perhaps you can try this as a recap after the actual skill learning session ;).
Here is a teaser of what the final stage of the tutorial will look like:
Win a lighthouse explorer bundle and a Hands-On Pass discount
We are also sponsors of the event and have agreed with The Construct to award one of the participants a Crazyflie if they win any contest. Specifically, we will be awarding a Lighthouse Explorer bundle, with a Qi deck and a custom-made charging pad similar to the ones we show at fairs like ICRA this year. So make sure to participate in the contests during the day for a chance to win this or any of the other prizes they have!
It is possible to follow the event for free, but if you’d like to participate with the ROSjects, you’ll need to get a hands-on pass. If you haven’t yet gotten a hands-on ticket for the Robotics Developer Day, please use our 50% off discount code:
On a side note, we will be at the Robotics: Science and Systems Conference in Delft from July 15th to 19th, 2024—just about two weeks from now. We won’t have a booth as we usually do, but we will be co-organizing a half-day workshop titled Aerial Swarm Tools and Applications (more details on this website).
We will be organizing this workshop together with our collaborators at Crazyswarm2, as well as the developers of CrazyChoir and Aerostack2. We’re excited to showcase demos of these frameworks with a bunch of actual Crazyflies during the workshop, if the demo gods are on our side :D. We will also have great speakers, including: SiQi Zhou (TU Munich), Martin Saska (Czech Technical University), Sabine Hauert (University of Bristol), and Gábor Vásárhelyi (Collmot/Eötvös University).
From the beginning of the company, we’ve always loved to join in at conferences. Only at a conference do you get the opportunity to show our products, meet our users or other tech-oriented people, learn about what others are doing, and let’s not forget the chance to discover a new place!
This year, we’ll be present at ICRA Yokohama – it’s in just 3 weeks. We’ll have a booth there (IC085 if you’re looking for us). We’ll be showing our autonomous demo with a twist just like we have shown last time, so please check the event page. This demo is extremely impressive and we’ve been improving on it each time we’ve shown it – beginning in our latest Japan trip and lastly at the last ICRA too. What’s new?
… and perhaps some more prototypes of whatever we managed to bring in our suitcase!
We’re really excited to be showing that and receive feedback, but also in hearing about what our users have been doing. ICRA is always a perfect place to catch up on all the amazing papers and publications featuring our hardware, and we couldn’t be prouder of all the cool stuff we’ve seen so far. We’re so proud, in fact, that we want to be able to show off! So, if you have a paper or a publication featured at ICRA, let us know – you can write us an email at contact@bitcraze.io, leave a comment below this post, or pass by our booth.
In fact, we’re prepared to make a deal. If you have a nice poster featuring our products and don’t know what to do with it once you’ve presented it, pass by our booth! We’re ready to swap them for something extra special. We plan to have a “hall of fame” at the office featuring your awesome work – in fact, it’s an idea we had last ICRA when someone just offered us their posters. Now, we’d like to cover our walls with them!
The corridor leading to the kitchen – we have space to show off the awesomeness!
So, whether you’re a seasoned conference-goer or a first-time attendee, don’t hesitate to wsing by our booth, say hello, and discover our newest demo! We hope to see you there.
Dev meeting
Next developer meeting is going to be on the 8th of May – we traditionally have a dev meeting every first Wednesday of the month, but this time it happens to be on the 1st of May which is a holiday here in Sweden. So already prepare your calendar for the 8th of May at 15.00 CET, and stay tuned for more info on which topic we’ll talk about!
Crazyflies back in stock !
You may have noticed that the Crazyflies have been out of stock for some time now. After some adventures, we are now fully back in stock with most of our bundles and products available in the shop!
Simulators are one of the most important tools used in robotics research. They usually are designed for different purposes with different levels of complexity. For example, simulators with low computational overhead that are parallelizable are mainly used for either training reinforcement learning algorithms or Monte Carlo sampling for verification of task completion in a nondeterministic environment. Some simulators also use rendering engines for the graphical display of models and the environment or when cameras are intended to be used in the robotics platform. Simulation is also useful for the development and deployment of new robotics firmware features where the firmware is compiled on a test machine and run in the loop with a simulated sensor suite. This simulator configuration is known as software-in-the-loop (SITL) because the vehicle firmware is intended to be run in the loop with the simulated vehicle physics and/or rendering engine. This feature is supported by autopilot suites such as PX4, ArduPilot, CogniPilot, and BetaFlight. This feature is not officially supported yet for Crazyflies because it requires a large overhaul of the firmware to be able to compile on a desktop machine and interact with different simulators such as Gazebo, Webots, PyBullet, CoppeliaSim, Isaac Sim, or Unreal Engine.
CrazySim
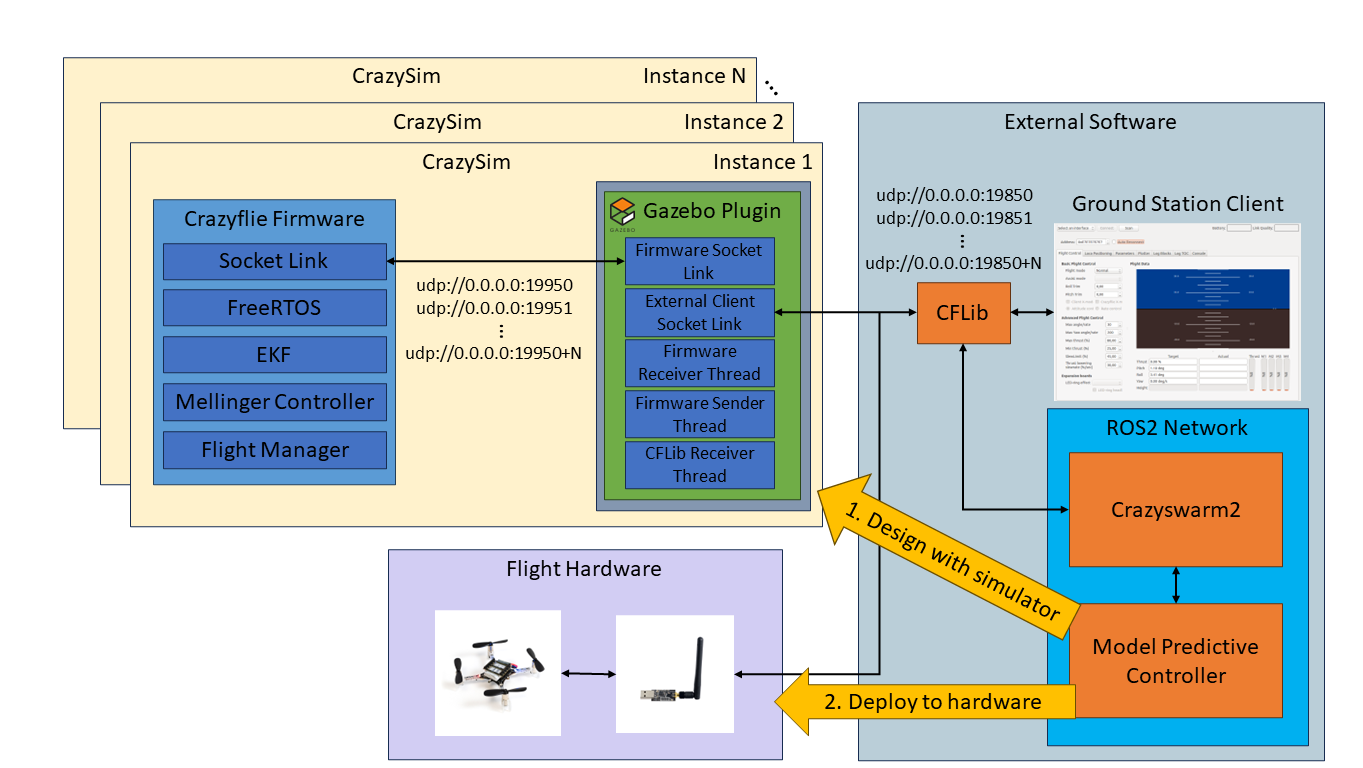
Last summer I began working with Crazyflies and noticed this Crazyflie simulator gap. I stumbled on a community-developed project for Crazyflie SITL called sim_cf. This project is exactly what I was looking for. However, the firmware used by the project is from July 2019 and the official firmware has had over 2000 commits made since then. The project also uses ROS 1, Gazebo Classic, and doesn’t support the Crazyflie Python library (CFLib). Using this project as a starting point I set out to develop CrazySim–a Crazyflie SITL project that doesn’t require ROS, uses Gazebo Sim, and supports connectivity through CFLib. Using CFLib we can connect the simulator to external software such as Crazyswarm2 or the Crazyflie ground station client. Users test their control algorithms in the external software using the simulator interface before deploying to real flight hardware.
An example of offboard model predictive control design and deployment workflow using CrazySim.
Using the Crazyflie Client for PID Tuning
We have also provided a modified Crazyflie client for CrazySim support. The Crazyflie client is a cool tool for testing a single drone in hardware. We can perform command based flight control, look at real time plots, save log data, and tune PID values in real time. The PID values are typically tuned for an out of the box Crazyflie. However, when we modify the Crazyflie and add extra weight through batteries, decks, and upgraded thrust motors then the behavior of the Crazyflie will change. If a user wants to tune a custom Crazyflie setup, then they can add additional models in this folder with their own motor and mass properties. Then they just need to add it to the list of supported models in either of the launch scripts. There is already an example model for the thrust upgrade bundle. Documentation for installing the custom client can be found here.
PID tuning a simulated Crazyflie using CrazySim on the Crazyflie PC client.
Crazyswarm2
We can now connect to the simulated Crazyflie firmware using CFLib. Therefore, we can set up a ROS 2 interface through Crazyswarm2 for swarm command and control through ROS 2 topics and services. To do this we first startup the drones using any of the launch scripts.
Then, we bring up Crazyswarm2 after setting up the configuration file for the number of drones chosen.
ros2 launch crazyflie launch.py backend:=cflib
We demonstrate an example of how we can control a swarm of drones using Crazyswarm2 GoTo service commands.
Crazyswarm2 GoTo service commands using CrazySim.
ICRA 2024
CrazySim is also being presented as a paper at the 2024 IEEE International Conference on Robotics and Automation in Yokohama, Japan. If you are attending this conference and are interested in this work, then I invite you to my presentation and let me know that you are coming from this blog post after. For the paper, I created a multi agent decentralized model predictive controller (MPC) case study on ROS 2 to demonstrate the CrazySim simulation to hardware deployment workflow. Simulating larger swarms with MPC may require a high performance computer. The simulations in this work were performed on an AMD Ryzen 9 5950X desktop processor.
Model predictive control case study for ICRA 2024 paper.
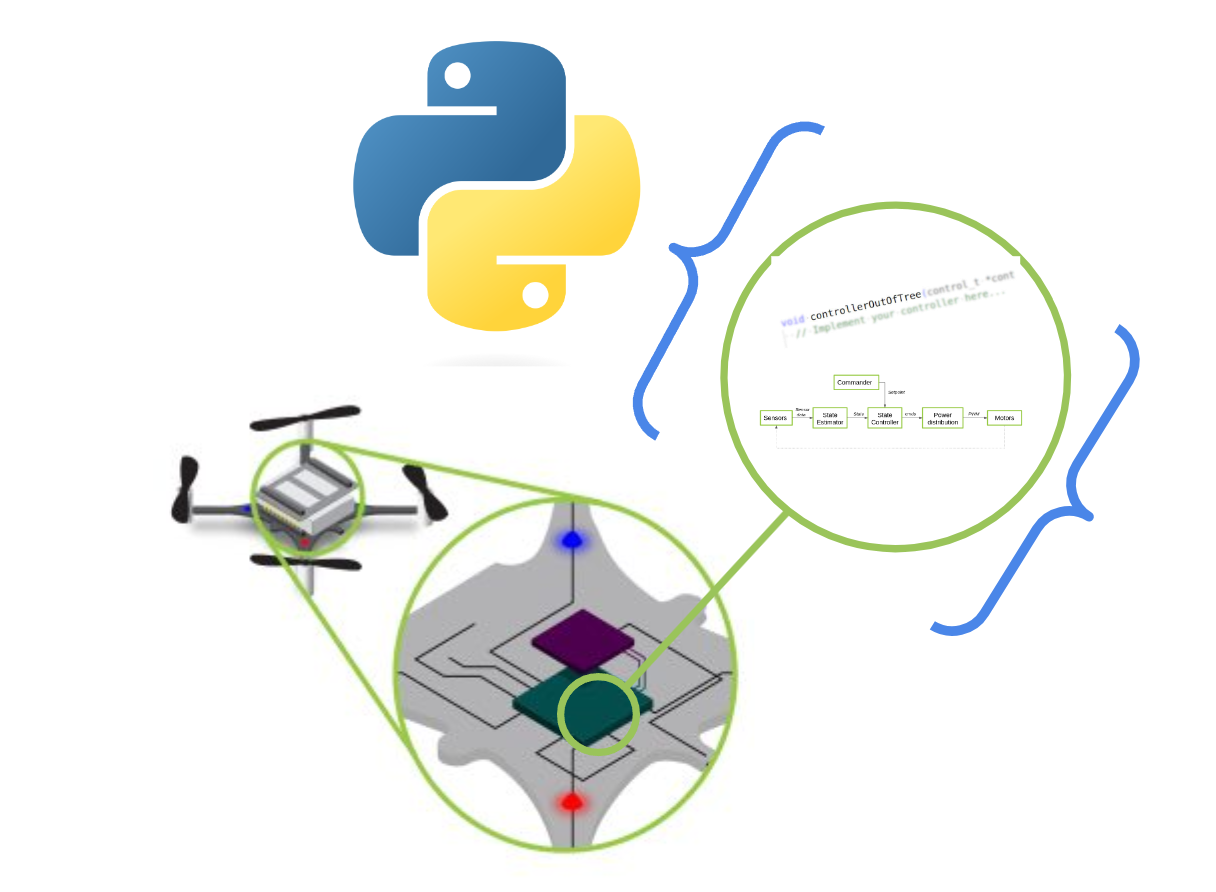
Today, we’d like to take the opportunity to spotlight a feature that’s been in our code base for some time, yet hasn’t been the subject of a blog post: the Python bindings for our Crazyflie firmware. You may have noticed it mentioned in previous blog posts, and now we’ll delve into more detail about what it is, how we and others are utilizing it, and what its future holds.
What are the Python bindings?
Language bindings, in essence, are libraries that encapsulate chunks of code, enabling one programming language to interface with another. For instance, consider the project Zenoh. Its core library is crafted in Rust, but it offers bindings/wrappings for numerous other languages like Python, C/C++, and so on. This allows Zenoh’s API to be utilized in scripts or executables written in those languages. This approach significantly broadens the functionality without necessitating the rewriting of code across multiple programs. A case in point from the realm of robotics is ROS(1), which initially created all of their APIs for different languages from scratch—a maintenance nightmare. To address this, for ROS 2, they developed the primary functionality entirely in C and provided wrappers for all other programming languages. This strategy eliminates the need to ‘reinvent the wheel’ with each iteration.
Rather than redeveloping the firmware in Python, our esteemed collaborators Wolfgang Hönig and James Preiss took a pragmatic approach. They selected parts of the Crazyflie firmware and wrapped them for Python use. You can see the process in this ticket. This was a crucial step for the simulation of the original Crazyswarm (ROS1) project and was continued for its use in the Crazyswarm2 project, which is based on ROS 2. They opted for SWIG, a tool specifically designed to wrap C or C++ programs for use with higher-level target languages. This includes not only Python, but also C#, GO, Javascript, and more, making it the clear choice for implementing those bindings at the time. We also strongly recommend checking out a previous blogpost by Simon D. Levy, who used Haskell to wrap the C-based Crazyflie Firmware for C++.
Where are the Python bindings being used?
As previously mentioned, the Crazyswarm1 & 2 projects heavily utilize Python bindings for testing key components of the firmware (such as the high-level commander, planner, and controller) and for a (hybrid) software-in-the-loop simulation. During the project’s installation, these Python bindings must be compiled so they can be used during simulation. This approach allows users to first test their trajectories in a simulated environment before deploying them on actual Crazyflies. The advantage is that minimal or no modifications are required to achieve the same results. While simulations do not perfectly mirror real-world conditions, they are beneficial because they operate with the same controller as the one used on the Crazyflie itself. In our own Crazyflie simulation in Webots, it’s also possible to use these same bindings in the simulator by following these instructions.
Three controllers (PID, Mellinger, and Brescianini), intra-drone collision avoidance, and the high-level commander planner have all been converted into Python bindings. Recently, we’ve added a new component: the Extended Kalman Filter (EKF). This addition is ideal as it allows us to test the filter with recorded data from a real Crazyflie and experiment with different measurement models. As we discussed in a previous blogpost, estimators are complex due to their dependence on chance and environmental factors. It’s beneficial for developers to have more control over the inputs and expected outputs. However, the EKF is deeply integrated into the interconnected processes within the Crazyflie Firmware. After a significant refactoring effort, these were added to the bindings by creating an EKF emulator (see this PR). This enabled Kristoffer to further enhance the TDOA outlier filter for the Crazyflie by emulating the full process of the EKF, including IMU data.
In addition to SITL simulation and EKF development, Python bindings are also invaluable for continuous integration. They enable comprehensive testing that encompasses not just isolated code snippets, but entire processes. For instance, if there’s a recording of a Crazyflie flight complete with sensor data (such as flow, height, and IMU data), and it’s supplemented with a recorded ground truth (from lighthouse/mocap), this sensor data can be fed into the EKF Python binding. We can then compare the outputted pose with the ground truth to verify accuracy. The same principle applies to the controllers. Consequently, if any changes are made to the firmware that affect these crucial aspects of Crazyflie flight, these tests can readily detect them.
If you like to try the python bindings tests for yourself, clone the Crazyflie-firmware repo and build/install the python bindings via these instructions. Make sure you are in the root of the repository and run: python3 -m pytest test_python/. Mind that you might need to put the bindings in the same path with export PYTHONPATH=<PATH_TO_>/crazyflie-firmware/build:$PYTHONPATH (please see this open ticket)
The next steps of the python bindings
We’ve seen how Python bindings have proven to be extremely useful, and we’re keen to further expand their application. At present, only the Loco positioning system has been incorporated into the EKF part of the Python bindings. Work is now underway to enable this for the Lighthouse system (see this draft PR). Incorporating the Lighthouse system will be somewhat more complex, but fortunately, much of the groundwork has already been laid, so we hope it won’t be too challenging. However, we have encountered issues when using the controller bindings with simulation (see this open ticket). It appears that some hardware-specific timing has been hardcoded throughout the PID controller in particular. Therefore, work needs to be done to separate the hardware abstraction from the code, necessitating additional refactoring work for the controller.
Recent projects like Sim_CF2 (see this blogpost) and Crazysim (see this discussion thread) have successfully compiled the Crazyflie firmware to run as a standalone node on a computer. This allows users to connect it to the Crazyflie Python library as if it were an actual Crazyflie. This full Software-In-The-Loop (SITL) functionality, already possible with autopilot suites like PX4 and Ardupilot, is something we at Bitcraze are eager to implement as well. However, considering the extensive work required by the aforementioned SITL projects to truly separate the hardware abstraction layer from the codebase, we anticipate that refactoring the entire firmware will be a substantial task. We’re excited to see what we can achieve in this area.
Indeed, even with a more comprehensive Software-In-The-Loop (SITL) solution, there’s no reason to completely abandon Python bindings. For developments requiring more input/output control—such as the creation of a new controller or an addition to the Extended Kalman Filter (EKF)—it’s beneficial to start with just that portion of the firmware code. Python bindings and a SITL build can coexist, each offering its own advantages and disadvantages for different stages of the development process. By leveraging the tools at our disposal, we can minimize the risk of damaging Crazyflies during development. Let’s continue to make the most of these valuable resources!
There is a new release of the firmware, version 2024.2. The main change, and almost only change, in this release, is the Bluetooth stack that was updated from the Nordic’s semiconductor S110 to S130, which affects the firmware on the NRF51 on the Crazyflie. This was mainly done to be able to pass the listing requirement on Bluetooth SIG, but it will also have beneficial technical effects on the Crazyflie radio communication state of affairs.
The new stack and bootloader are distributed in the normal release .zip, which means that it can be updated from the client as normal. Please note that the latest lib and clients are required as we have had to implement new procedures to flash the bootloader and stack.
First of all, let’s define what is a soft device. Nordic semiconductor radio chips are awesome in the way that the radio hardware is fully documented, this means that we can implement our own radio protocols but we would also be able to implement our own Bluetooth stack (I have attempted that a long time ago with some success, the nRF5 radio hardware is really powerful and can be set up to do much of the work!). However, backing your own Bluetooth stack would require passing a full suite of validation at the Bluetooth SIG to prove the stack conform to specification. In order to avoid that, the usual strategy is to buy a Bluetooth device and to talk to it over UART. What Nordic did is to implement a “Softdevice”, a binary blob that runs in the same CPU as the user application and that talks to the application using software interrupt. This keeps the application completely separated from the Bluetooth stack and so means that we get the benefits of a pre-qualified Bluetooth stack that has already been tested and approved.
Currently, we have ported the bootloader and the nrf firmware to the new S130 stack. This opens a lot of potential benefits for the future:
The new stack should be at least 6 times faster than the old one. This makes implementing BLE communication for the Crazyflie to a PC/Chromebook much more appealing and should allow to make the existing mobile client more full features.
We are now able to update the bootloader, so we can make a new improved version of it in the future (ie. with safe link, swarm optimization, much faster Bluetooth boot loading….)
The new stack supports device and host mode. So things like pairing a gamepad with the Crazyflie becomes a technical possibility! (actual implementation is left as an exercise for the contributor ;-).
One very important thing to note is that working on the bootloader requires a debugger: if you flash a bugged radio bootloader you need a SWD debug probe to be able to fix your Crazyflie. The bootloader+softdevice flashing procedure is very safe, as long as you flash a working firmware.
This change should open quite new exciting possibilities. It will be interesting to see what we can achieve with BLE and updated bootloaders in the future. Please note that we had to make a change to both the Crazyflie python library and the CFclient in order to flash this new firmware so make sure that you update those as well to try out this new release.
Developer meeting
The next developer meeting will be on the 6th of March 2024, we will talk about the Crazyflie Supervisor subsystem… We have made some changes to the supervisor recently, and we will continue working more on it in the next couple of weeks mostly preparing for the arrival of the Brushless Crazyflie. We will talk about the current state and what we are working on. Follow the thread on Bitcraze Discussions to be up to date on how to join!