It’s been 2 weeks ago that we went to ROSCon ’24 in Odense Denmark as exhibitor and silver sponsor! Since it was a 2-hour train ride for us, it made much sense for us to attend this as a company and we are very happy we did. In this blog post we are sharing our experiences of the event.
The Booth Build-up and Demo
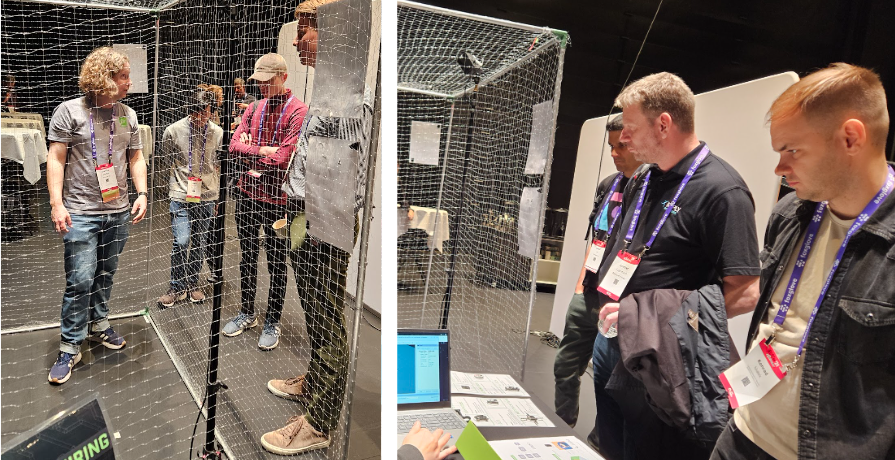
We made some changes to our well-known cage that is a must at every conference we have exhibited. Usually, it would take us a good few hours just to set up the cage alone, but we have improved the corners which improved our build-up experience quite a lot and we were done within an hour! Just in time for us to join the tours and bird of feather sessions with no stress!

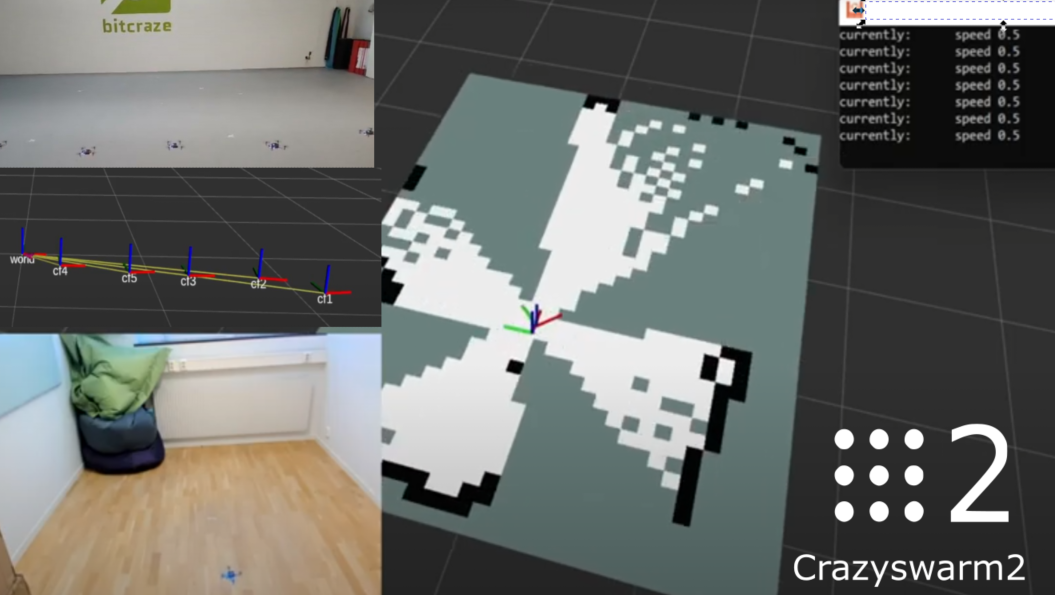
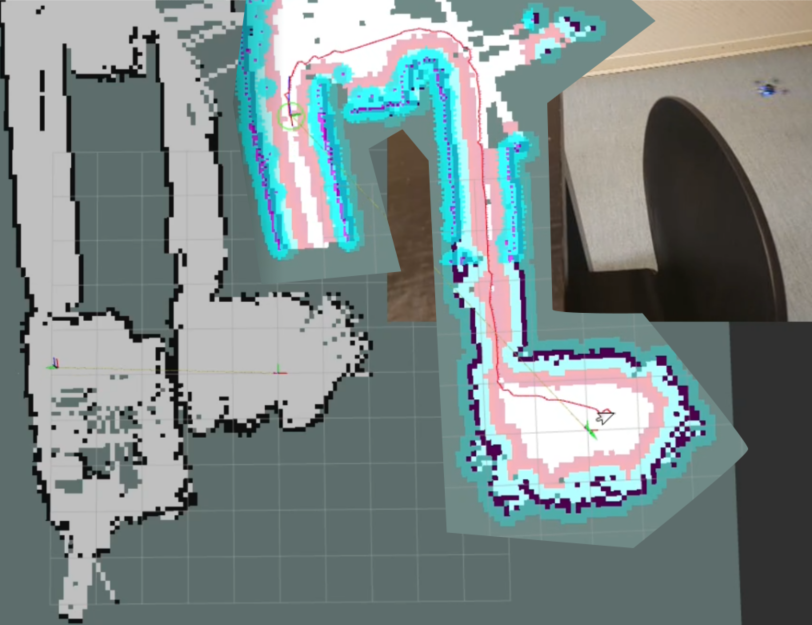
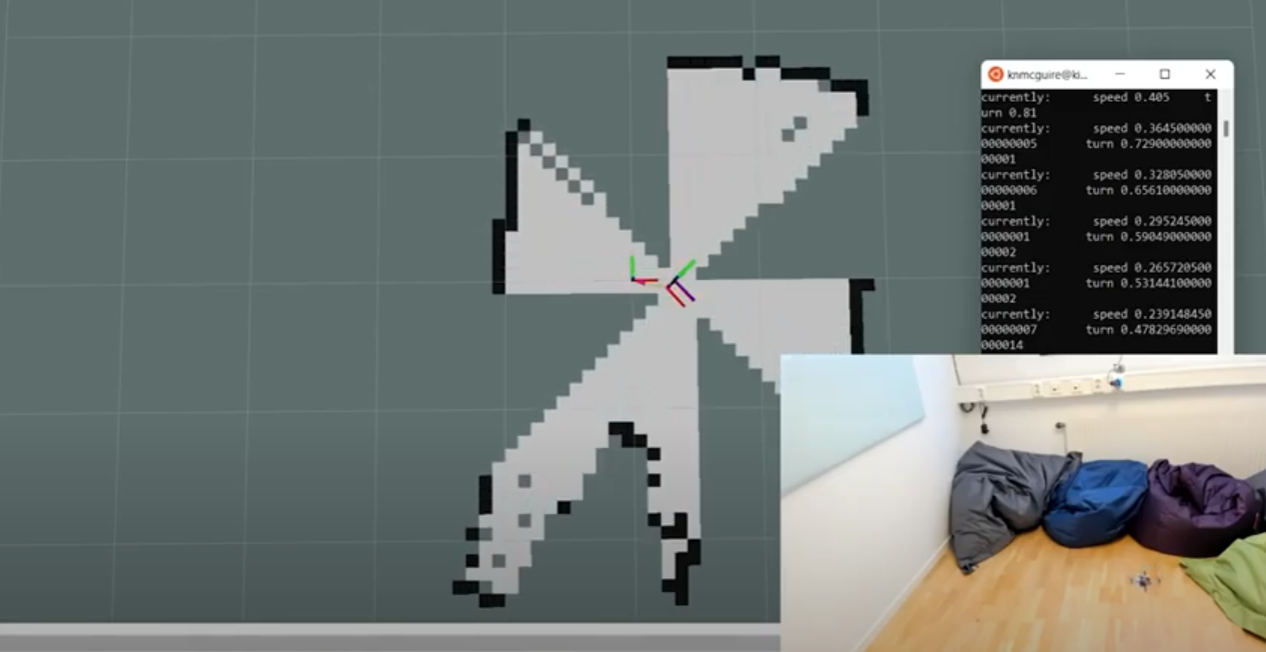
For ROSCon we prepared a more ROSflavored demo that enabled full demo control from ROS, which was based on the swarming mapping demo shown in this tutorial and the robotics developer day (see this video). Here we already hit a couple of issues that all had to do with the differences between demos for exhibitions versus one-time talk demos (see OpenCV! Live episode where we talked about demo driven development). We switched back to our usual fully decentralized autonomous swarm demo (see this blog post). Luckily, the Crazyflie could still communicate at the same time to give through the multiranger values, such that the computer could still generate the Swarm merging map while the Crazyflies were flying around avoiding each other.
Exhibition Booth
Tuesday and Wednesday were the actually exhibition days so that is when we talked with most of the people. It was a bit slow in the beginning as we were located at the end of the hall, but luckily the ROSCon passport game motivated people to go by each of the booth to get a stamp. We went a bit rogue and made our own much bigger stamp ;) but luckily it still fit as long as we aligned properly. We donated a STEM Ranging bundle as one of the prizes to congratulate whoever won this! And now they can try out this ROS tutorial ;)
We noticed that the Crazyflie Brushless got a lot of attention. The ability to carry more than a regular Crazyflie seemed of great interest to many of the ROSCon attendees. Moreover, the prototype of the forward-facing expansion connector (a.k.a. the Camera deck) was also a well-requested feature of the Crazyflie and has solidified our belief that the community needs something like this as well. In general, the lighthouse positioning system and the stand-alone lighthouse node were also quite well received. Luckily we were able to forward people to our accepted talk about the Lighthouse position system on Thursday
Lighthouse Positioning Talk
One of the reasons we were present at ROSCon 2024 was to gauge the interest of the general robotics community in the lighthouse positioning system. We have been using it for years for the Crazyflies, but we’d like to also evangelize its submillimeter and cost-effective awesomeness for any other platform. And there seems to be quite some interest for it! We gave a short presentation on Thursday Afternoon during the ‘ROS Tooling & Testing’ session (we will share the recording once it becomes available).
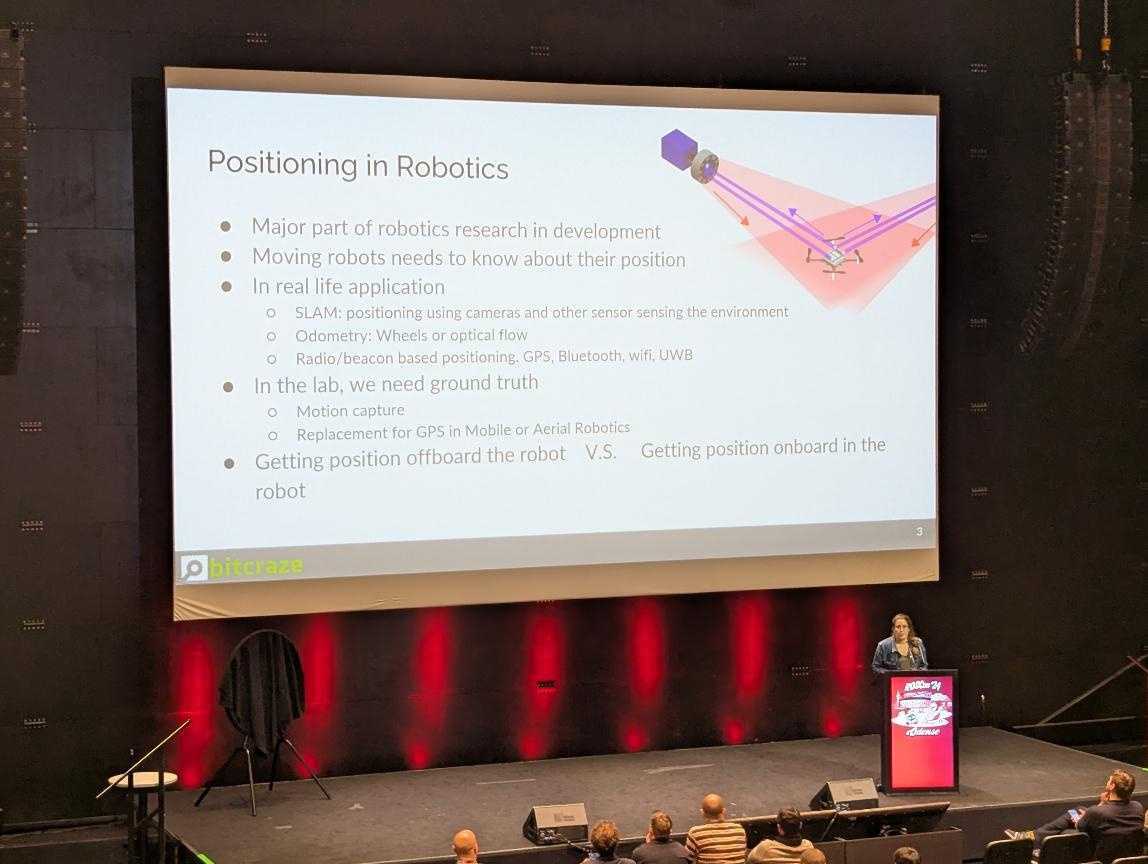
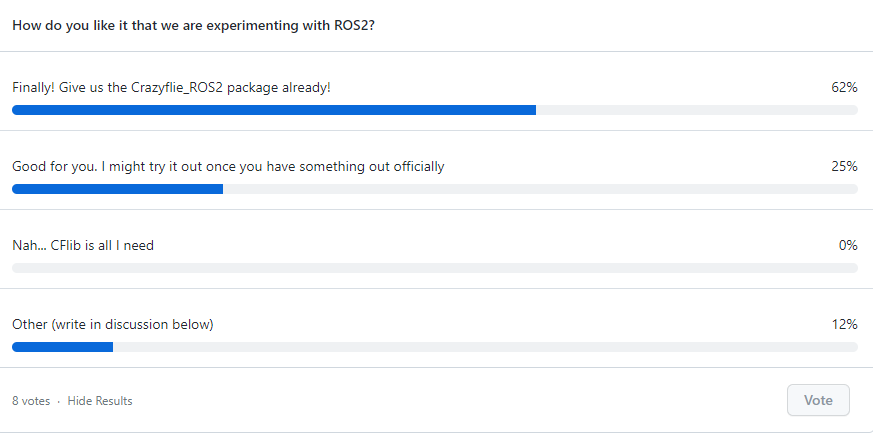
We also send out some polls just to see what kind of positioning systems are used and for what purpose. It was evident that there are many outdoor roboticists that also use onboard-sensing based state-estimation like SLAM, but there was still a significant portion of people that used indoor positioning systems for the actual positioning replacement and/or Ground truth. And also we got some valuable feedback, like if it would still work out with a Lidar or Kinect, or if it is suitable for a 12-meter size robot (wow). We will take this all in for improvements for any new upgrades to the lighthouse deck and stand-alone nodes for it. Thanks to you all for providing all the feedback and the interest!
Side-events
We also attended a couple of events related to ROSCon 2024. Marcus and Kimberly both attended tours of Odense Robotics, Universal robots and Teradyne facilities. The tour of the SDU Drone Center was particularly impressive. Moreover, we also attended the Aerial Robotics Meetup, who attracted about 90-100 people at the max, with drinks and snacks provided by Dronecode Foundation. It was great to see such a big aerial presence at ROSCon. There was also the Karaoke meetup, the ROSCon afterparty by Odense Robotics with a beer-serving robot arm, the Women in Robotics lunch… there was just too much to attend to but it all was a great success!
Check out the ROSCon 2024 event page on our website of what we have shown at ROSCon 2024 and see more information about the demos/products we had there.