Whenever we show the Crazyflie at our booth at various robotics conferences (like the recent ICRA Yokohama), we sometimes get comments like ‘ahh that’s cute’ or ‘that’s a fun toy!’. Those who have been working with it for their research know differently, but it seems that the general robotics crowd needs a little bit more… convincing! Disregarding its size, the Crazyflie is a great tool that enables users to do many awesome things in various areas of robotics, such as swarm robotics and autonomy, for both research and education.
We will be showing that off by giving a live tutorial and demonstration at the Robotics Developer Day 2024, which is organized by The Construct and will take place this Friday, 5th of July. We have a discount code for you to use if you want to get a ticket; scroll down for details. The code can be used until 12 am midnight (CEST) on the 2nd of July.
The Construct and Robotics Developer Day 2024
So a bit of background information: The Construct is an online platform that offers various courses and curriculums to teach robotics and ROS to their users. Along with that, they also organize all kinds of live training sessions and events like the Robotics Developer Day and the ROS Awards. Unfortunately, the deadline for voting in the latter has passed, but hopefully in the future, the Crazyflie might get an award of its own!
What stands out about the platform is its implementation of web-based virtual machines, called ‘ROSJects,’ where ROS and everything needed for it is already set up from the start. Anyone who has worked with ROS(2) before knows that it can be a pain to switch between different versions of ROS and Gazebo, so this feature allows users to keep those projects separate. For the ROS Developer Day, there will be about five live skill-learning sessions where a ROSject is already preconfigured and set up for the attendees, enabling them to try the tutorial simultaneously as the teacher or speaker explains the framework.
Skill learning session with the Crazyflie
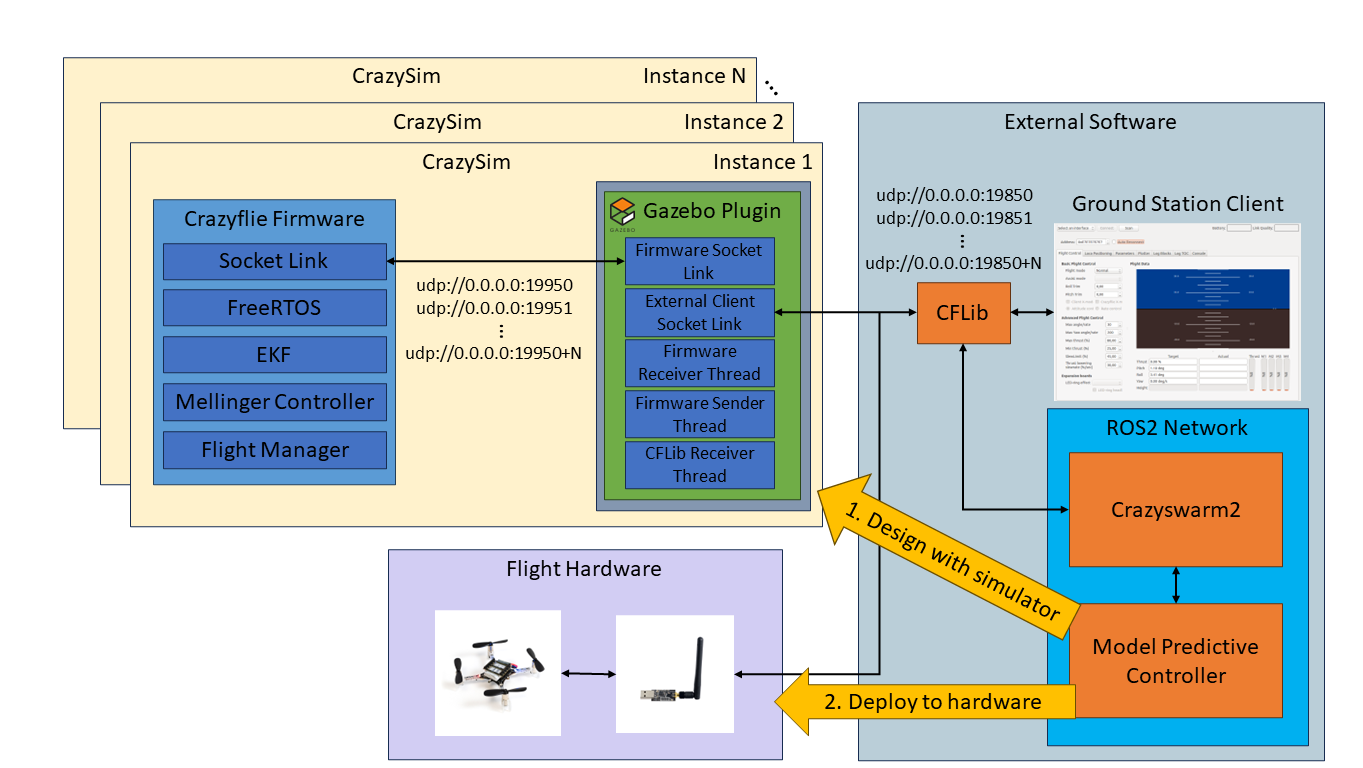
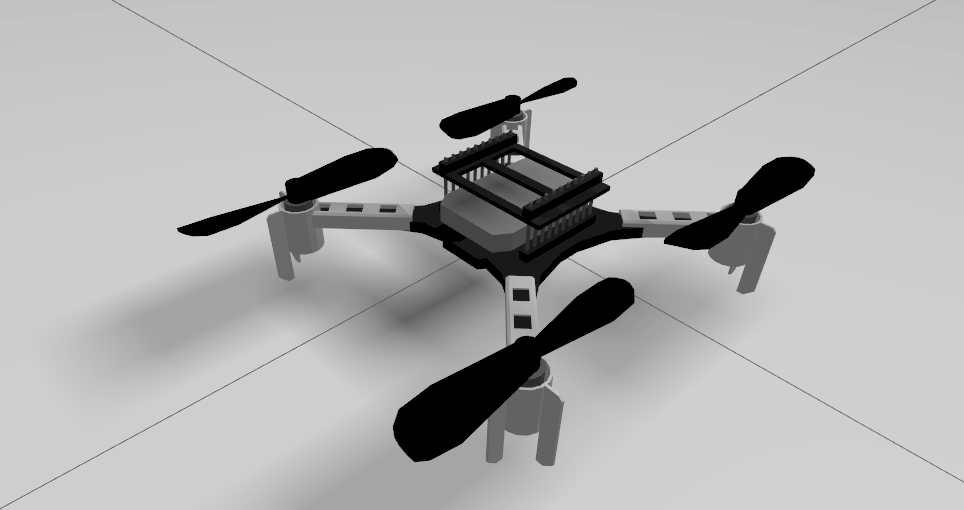
One of the earlier mentioned skill learning sessions is, of course, one with the Crazyflie! The title is “ROS 2 with a Tiny Quadcopter,” and it is currently planned to be the first skill learning session of the event, scheduled at 15:15 (3:15 pm) CEST. The talk will emphasize the use of simulation in the development process with aerial robotics and iterating between the real platform and the simulated one. We will demonstrate this with a Crazyflie 2.1 equipped with a Lighthouse deck and a Multi-ranger deck. Moreover, it will also use a Qi-charging deck on a charging platform while it patiently waits for its turn :D
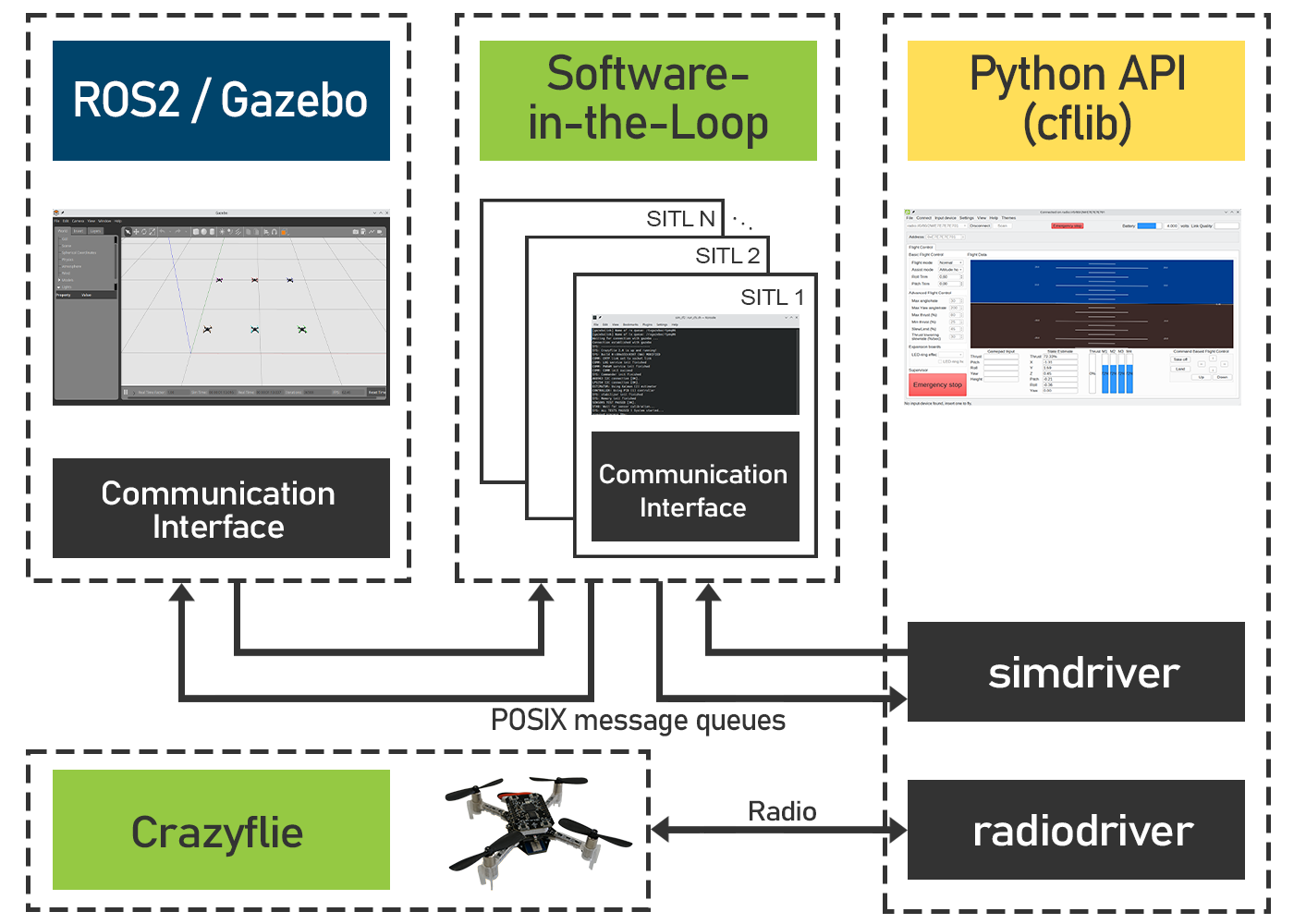
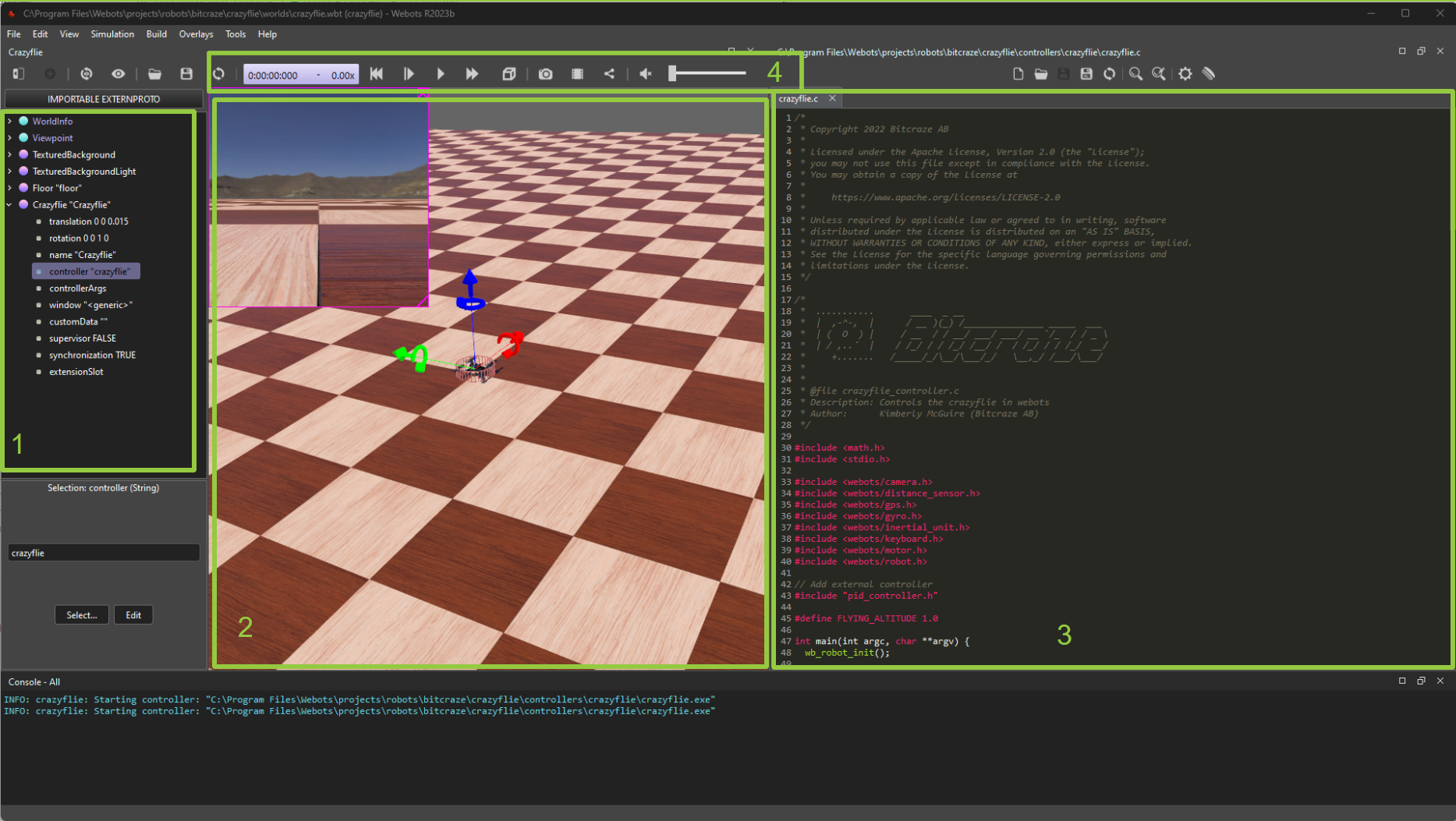
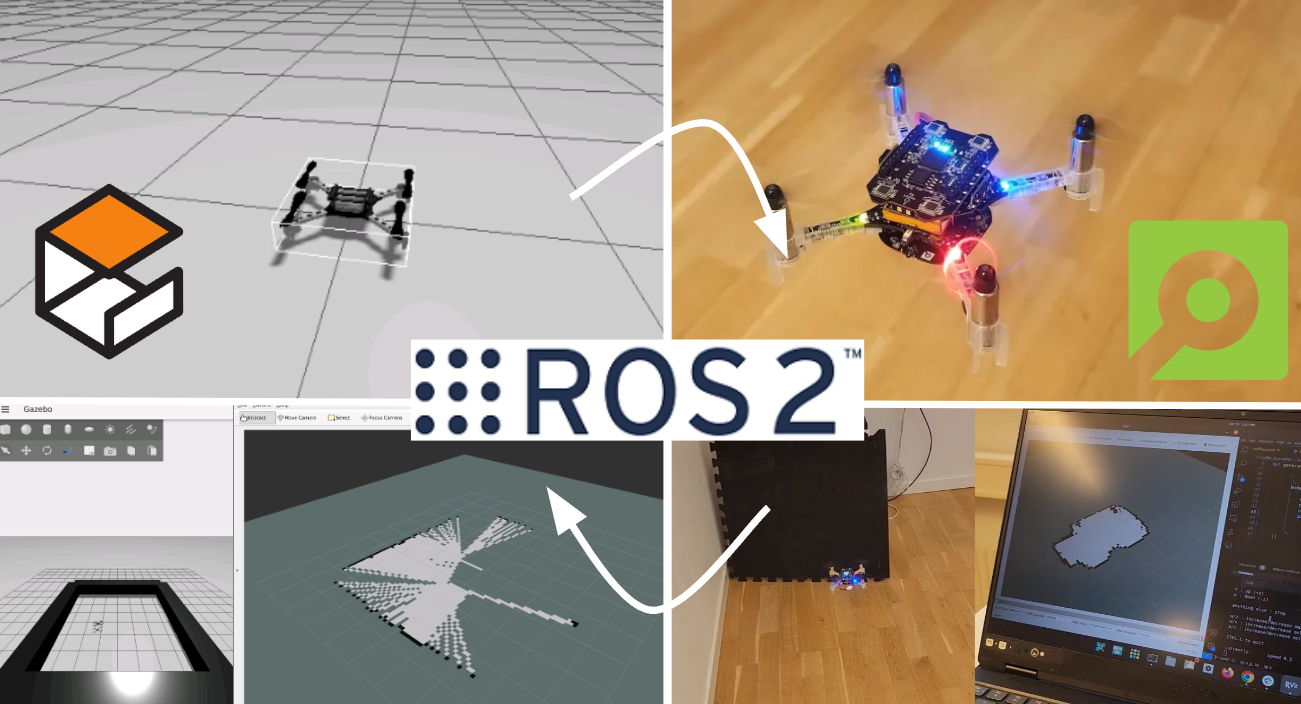
What we will be showing is a simple implementation of a mapping algorithm made specifically for the Crazyflie’s Multiranger deck, which we have demonstrated before at ROSCon Kyoto and in the Crazyswarm2 tutorials. What is especially different this time is that we are using Gazebo for the simulation parts, which required some skill learning on our side as we have been used to Webots over the last couple of years (see our tutorial for that). You can find the files for the simulation part in this repository, but we do advise you to follow the session first.
You can, if you want, follow along with the tutorial using a Crazyflie yourself. If you have a Crazyflie, Crazyradio, and a positioning deck (preferably Lighthouse positioning, but a Flowdeck would work as well), you can try out the real-platform part of this tutorial. You will need to install Crazyswarm2 on a separate Ubuntu machine and add a robot in your ROSject as preparation. However, this is entirely optional, and it might distract you from the cool demos we are planning to show, so perhaps you can try this as a recap after the actual skill learning session ;).
Here is a teaser of what the final stage of the tutorial will look like:
Win a lighthouse explorer bundle and a Hands-On Pass discount
We are also sponsors of the event and have agreed with The Construct to award one of the participants a Crazyflie if they win any contest. Specifically, we will be awarding a Lighthouse Explorer bundle, with a Qi deck and a custom-made charging pad similar to the ones we show at fairs like ICRA this year. So make sure to participate in the contests during the day for a chance to win this or any of the other prizes they have!
It is possible to follow the event for free, but if you’d like to participate with the ROSjects, you’ll need to get a hands-on pass. If you haven’t yet gotten a hands-on ticket for the Robotics Developer Day, please use our 50% off discount code:
19ACC2C9
This code is valid until the 2nd of July, 12 am (midnight) Central European Time! Buy your ticket on the event’s website: https://www.theconstruct.ai/robotics-developers-day/
RSS 2024 aerial swarm workshop
On a side note, we will be at the Robotics: Science and Systems Conference in Delft from July 15th to 19th, 2024—just about two weeks from now. We won’t have a booth as we usually do, but we will be co-organizing a half-day workshop titled Aerial Swarm Tools and Applications (more details on this website).
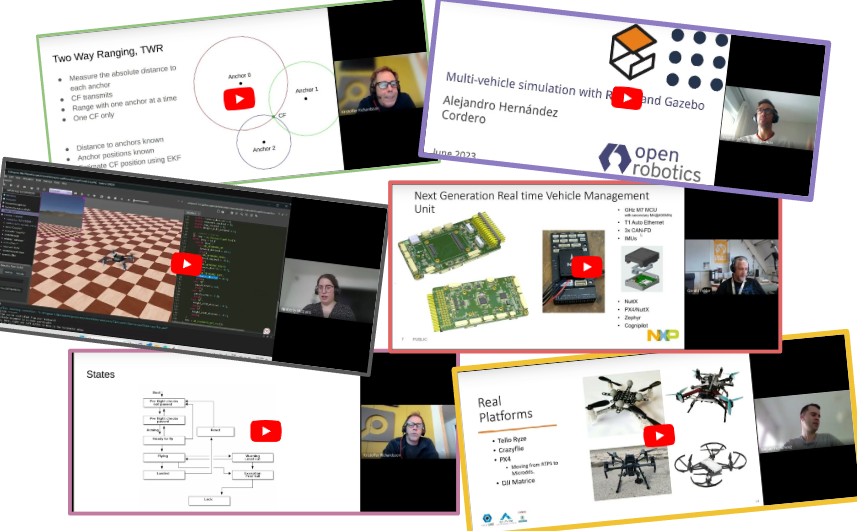
We will be organizing this workshop together with our collaborators at Crazyswarm2, as well as the developers of CrazyChoir and Aerostack2. We’re excited to showcase demos of these frameworks with a bunch of actual Crazyflies during the workshop, if the demo gods are on our side :D. We will also have great speakers, including: SiQi Zhou (TU Munich), Martin Saska (Czech Technical University), Sabine Hauert (University of Bristol), and Gábor Vásárhelyi (Collmot/Eötvös University).
Hope to see you there!