This weekend we spent at the Maker Faire in Rome and got to meet lots of fellow geeks and makers. Even though it was busy times at the Bitcraze booth, we got a chance to walk around a bit and see other projects. It’s really inspiring to see what people come up with! It was also the first time we got the chance to show off the new Crazyflie 2.0 to the public and the feedback was really positive. We have realized that we might be a bit wide in our description of the new platform. There’s lots of new features that we are very eager to talk about, but maybe we should focus a bit more on the biggest improvements. With two weeks left on the pre-order we have been trying really hard to get some extra attention for the new platform, but haven’t really succeeded yet. This might be one of the reasons.
So even though there’s lots of new features we would really like to highlight the new expansion port. It’s been something that we have been talking about internally for a while now and we are really excited that we managed to fit it in. Like we wrote in an earlier post we used some exotic use-cases to figure out what to include in the expansion header. For example this resulted in the ability to charge the battery from the expansion board, like we are doing with the Qi wireless charging expansion board. Since the Crazyflie 2.0 has the ability to connect multiple expansion boards (both on top and bottom) we also needed some way to determine what boards are added. So one of the pins in the port is used as a 1-wire memory buss. Each expansion board has a 1-wire memory that allows identification of the board, it’s revision and what resources it uses. This way we can adapt the features available from the computer client or mobile device when the platform is connected.
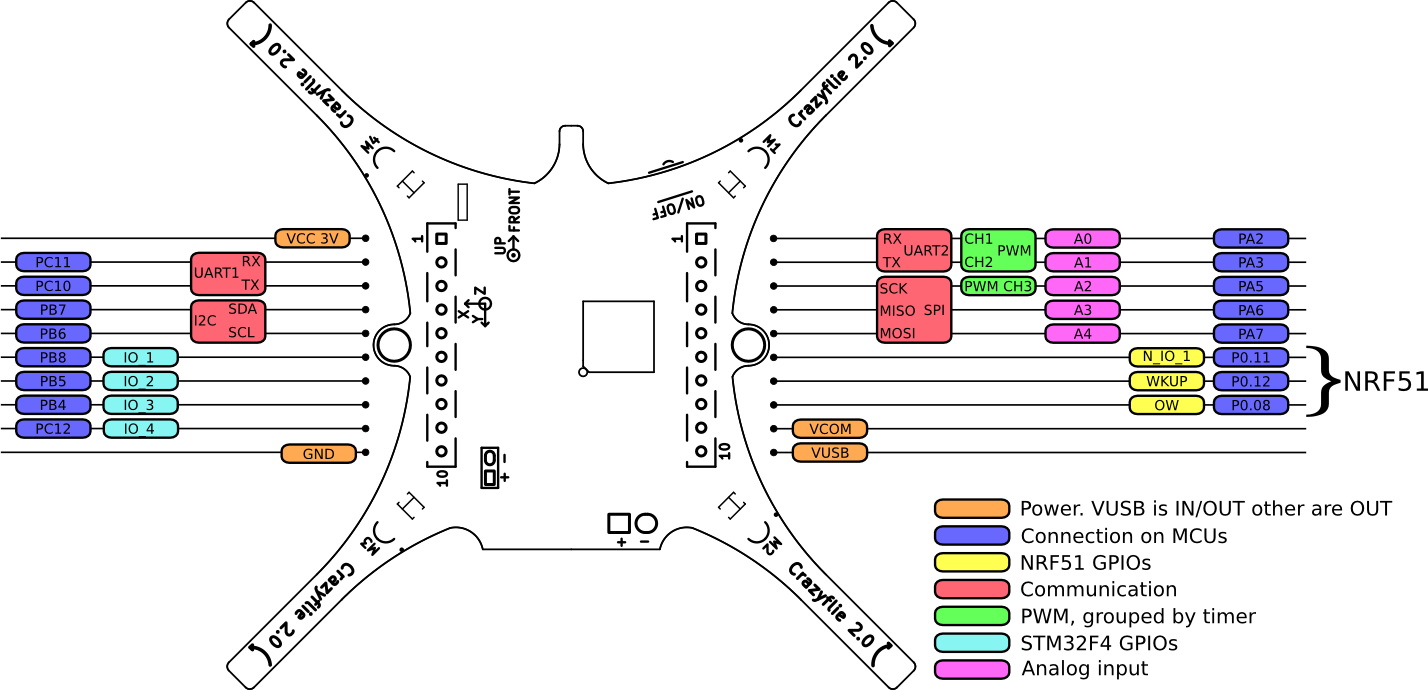
Below is an overview of what’s available in the expansion port:
For the pre-order we have managed to include 4 expansion boards: the LED-expansion, the Qi wireless charging expansion, the breakout expansion and the prototyping expansion. Aside from these boards we also have some prototypes of more expansions. Before the pre-order we were working really hard on a GPS expansion board, but in the end we didn’t think the current prototype had enough precision to launch. We reached about 10-20 meters accuracy with locking times of about 2-3 minutes and didn’t have time to spin another prototype. During the fall we will work on perfecting the design so we reach a level of performance that we feel is good enough.
We also have a prototype for a distance sensor to be used for precision landing. After looking for a solution for a while we finally found the VL6180, a time of flight sensor from ST. The range is not very long, but combined with the high precision pressure sensor mounted on the Crazyflie 2.0 we think the result can be very good. We also have an uSD expansion that we are currently testing.
After getting feedback from the visitors we met at the Maker Faire we have also decided that we will be designing an Edison adapter expansion for the Crazyflie 2.0. The Edison board is fairly small and light, so it should be possible to design an expansion board that has the 70-pin expansion connector featured on the Edison. Our plan is to use some of the interfaces in our expansion board to connect to the Edison, like I2C, UART and SPI.
Last but not least we are also working on an analog FPV expansion board. It’s still just an early prototype, but we think it’s something that a lot of users might be interested in.

As we will continue making more and more boards we also hope the community will take the opportunity to do so as well. We will soon release templates for KiCad making it really quick to get started. What board would you like to make? Let us know what you think about the new expansion port. Do you have any ideas for boards or any comments about our planned ones? We would love to get some feedback!
We would also like to say congratulations to Mihir Garimella on being one of the winners of the Google Science Faire 2014 with his project the Flybot! He used the Crazyflie to work on escape maneuvers similar to those of fruit flies. Really great work!
Amazing progress! I already preorderd my Crazyflie 2.0 (with expansions of course!) and can’t wait to get it. For me the big selling points were:
1. Improved radio
2. Increased payload
3. Expansion port
In terms those new expansions:
1. Distance: That would be a great addon! Similarly, distance sensors around the quadcopter for collision detection would be great.
2. Edison: What would be the use-case here? I feel that there is already enough computing power on the flie. It might be interesting in combination with a camera to run vision algorithms onboard.
GPS/Camera are probably high demand for hobbyists, but less interesting for research. Another idea I had was to add the Wiimote IR sensor. In combination with IR LEDs on the floor, that might be sufficient for fully autonomous hovering or even object following.
Btw.: If you want to spark more interest in the research community, you should look into integration into ROS. This will happen sooner or later anyways, but official support is always better than 3rd party solutions:-)
Thanks for the kind words Wolfgang, we need them to mange the long work days!
1. We have been investigating the VL6180 ToF sensor which works pretty well but only up to 25cm. They claim it can be up to 50cm but nothing we managed to do yet. The good thing is that it is small and light so putting 6 of them in all directions shouldn’t be a problem. I’m pretty sure we will soon see ToF sensors with longer range.
2. Edison would be mainly for image processing and maybe WiFi. So a camera on that board would have to be a must.
A community member Oliver has done some great work on ROS implementation but I agree, if we could maintain it that would be great for researchers. We need more resources to get there though. Hopefully Crazyflie 2.0 could make that happen!
Hi agree with Wolfgang, that a ROS integration would be fantastic.
However, I disagree that the camera and GPS is only for hobbyists. I do research in reinforcement learning and one of my biggest hesitations about picking up the crazyflie has always been the lack of camera or GPS.
Great Job!
I’m interested about your plan,and I want to communicate with the other developer in the BBS. But I cannot register a member of the website. The problem is the answer of of the confirmation of registration question:”What is our quadcopter named?” I write down: crazyfile,crazyfilenano and so on,but it doesn’t work…It prompt below words in red:
You have provided an invalid answer to the question.
Can you tell me the correct answer of the confirmation of registration question?
Thank you.
Ahh, you misspelled our misspelling :). You should write crazyflie (not crazyfile).
I’m most interested in the FPV camera.
I’m half tempted to wait on the pre-order till it’s available.
If you like to do DIY then it is kind of easy to build one from of the shelf components. There is some threads about it in the forum for the Crazyflie Nano.
Everything looks cool. The only thing that I dislike is the small battery, 7 minutes seems kind of short. I have seen on the same store a 6600 mAh battery, but it weighs 41 grams, as opposed to 7 on the standard one, plus 15 for the spare weight, so it’s too heavy.
It’s a bit of a trade of. There is a possibility to use a bigger battery to get longer flight times but it will be decreasing the agility. The connector is a pretty standard one so it is easy to find bigger batteries.
I am totally enamoured with the new crazy file 2.0. I was wondering if anyone is working on an iPad app as a controller. I have an iPad 1 / iOS 5.0. Not being a gamer, I do not have all the other controllers and transmitters. I do have a Samsung Y android phone but it is pretty much useless for this sort of thing.
George
Hi George,
We have been working on an iOS client which we have tested on iPhone, but it should also work on iPad. But the iPad1/iOS5.0 is unfortunately too old to support Bluetooth LE so you will not be able to fly from it.
I tried to order the crazyflie yesterday, but the order system didn’t work and gave me error “抱歉,由于网络系统的原因,您暂时无法使用当前的服务,请稍候再使用。”, what should I do – try again tommmorow?
And btw, when I buy only the crazyflie, can I develop and change the firmware through USB or something? I want to attach sonar sensor and develop autonomous behavior.
Hi,
I would recommend trying again, but now the discounted pre-order has ended. I would recommend contacting Seeedstudio customer support.
Yes, you can develop your own firmware and flash it via the radio.
Hey guys,
I think I found a discrepancy in the Rev.C schematic and the expansion pinout above.
I think the UART2 Rx/TX lines are marked incorrectly in the expansion board.
It should be USART2_TX.
Can you please confirm?
Thanks!
PS: I will cross-post this in the forum as well – just so everyone can benefit :)
Yes you are correct and we fixed this in the wiki page: https://wiki.bitcraze.io/projects:crazyflie2:expansionboards:index#deck_pin_allocation